面向混合仿真的無人車作戰運用仿真通信設計與實現
2020-08-03 06:54:33王冬寧
價值工程 2020年21期
王冬寧
摘要:針對無人車作戰運用仿真需要,分析了面向混合仿真的無人車作戰運用仿真平臺系統架構,梳理了數字推演仿真分系統和半實物仿真分系統的組成與基本功能;針對混合仿真平臺對通信要求,提出了設計思路,具體針對自動駕駛儀和無人車半實物控制組件進行通信設計并實現。應用實踐表明:該通信機制實時性高,數據準確性高,可以很好地滿足仿真需要。
Abstract: Aiming at the need of unmanned vehicle operation simulation, the architecture of unmanned vehicle operation simulation platform for hybrid simulation is analyzed, the composition and basic functions of digital simulation subsystem and hardware-in-the-loop simulation subsystem are sorted out. Aiming at the communication requirement of hybrid simulation platform, the design idea is put forward and the communication between autopilot and semi-physical control module of unmanned vehicle is designed and realized. The application shows that the communication mechanism has high real-time performance and data accuracy which can meet the simulation requirements well.
關鍵詞:混合仿真;無人作戰;半實物仿真;數字仿真;通信
Key words: hybrid simulation;unmanned combat;hardware in the loop simulation;digital simulation;communication
中圖分類號:TP212? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)21-0179-04
0? 引言
近年來,隨著無人技術的高速發展,無人作戰領域逐漸成為了各軍事強國角逐的新戰場。伴隨著無人車的發展,如何在實戰條件下進行無人車的作戰使用,如何在使用過程中將無人車的作戰效能發揮到極致等問題已經成為亟待解決的新問題。
混合仿真是當前仿真領域的研究應用熱點。通過將半實物仿真與數字仿真結合使用,以半實物仿真的輸出數據作為數字仿真的數據來源,可以有效提升底層數據的真實性,保證仿真結果的高置信度。本文以無人車作戰仿真為研究背景,基于混合仿真的無人作戰仿真平臺,對半實物仿真與數字仿真通信接口進行設計并實現應用。
1? 基于混合仿真的無人車作戰運用仿真平臺
1.1 無人車作戰運用仿真平臺系統架構
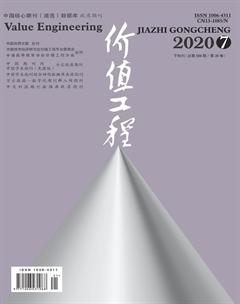
充分發揮混合仿真優勢,構建無人車作戰運用仿真平臺。仿真平臺主要由數字推演仿真分系統和半實物仿真分系統組成。數字推演仿真分系統和半實物仿真分系統通過局域網實現實時通信。仿真平臺系統架構如圖1組成。
1.1.1 數字推演仿真分系統
數字推演仿真分系統主要包括紅方仿真引擎、藍方仿真引擎、想定編輯與仿真控制和態勢顯示四部分。
紅方仿真引擎:主要用于進行紅方裝備的仿真推演,并在仿真過程中,對紅方裝備進行仿真過程信息記錄。
藍方仿真引擎:主要用于進行藍方裝備的仿真推演,并在仿真過程中,對藍方裝備進行仿真過程信息記錄。
想定編輯與仿真控制子系統:作戰想定編輯輸入,用于仿真過程中紅、藍方行為的控制管理。
態勢顯示子系統:接收仿真過程中各數據信息,對戰場態勢進行實時顯示。
1.1.2 半實物仿真分系統
無人車為多車集群作戰模式,半實物仿真分系統由n個無人車自動駕駛儀和n個無人車仿真節點共同組成。
無人車自動駕駛儀:為無人車核心控制器件,用于接收無人車感知的外部信息,進行邏輯判斷并輸出控制命令,為半實物仿真分系統的核心組成部分。
無人車仿真節點:基于VR-Forces系統進行構建,用于模擬無人車作戰仿真環境,為無人車自動駕駛儀提供仿真過程中需要的內部、外部的信息數據。具體包括:戰場環境信息,無人車態勢感知、路徑軌跡、路徑計算、智能行為、協同攻擊等算法。
1.2 數字推演仿真分系統
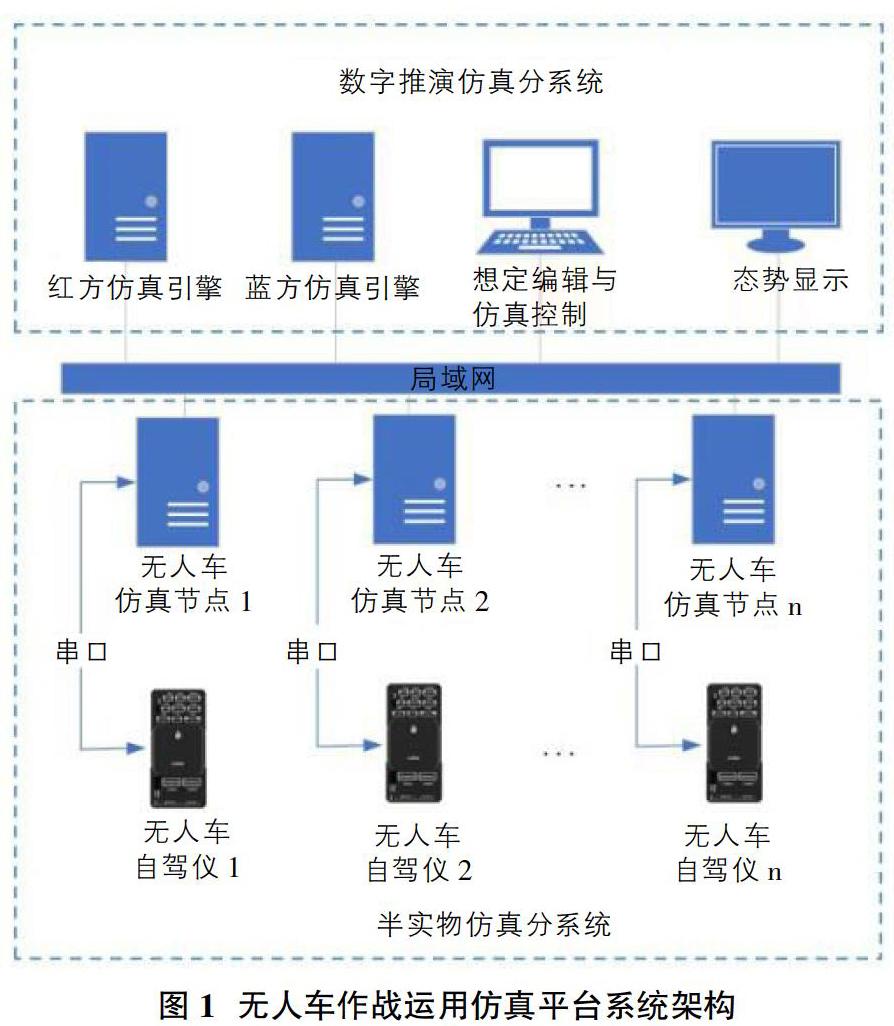
數字推演仿真分系統基于VR-Forces系統進行構建。VR-Forces是VT MAK公司的CGF(計算機生成兵力)軟件,其底層通信基于VR-Link,支持DIS、HLA13、HLA1516、HLA1516e等分布式仿真協議。VR-Forces從頂層上分為前端(Front-End)和后端(Back-End),前端用于想定編輯與仿真控制,后端用于仿真推演計算。前后端可部署于不同的計算機上,通過網絡相連,支持單前端多后端、多前端單后端和多前端多后端等多種部署運行模式,如圖 2所示。
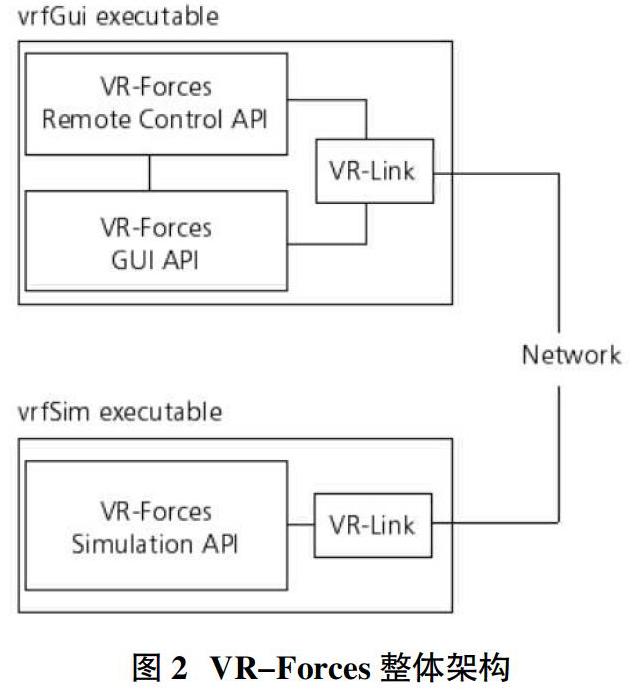
VR-Forces中的核心是仿真對象,仿真對象具有狀態和行為。其行為結構采用類似機器人的傳感器-控制器-執行器組件結構。傳感器創建外部模擬環境的模型,控制器是為執行器提供控制輸入的行為模型,控制器實現物理模型。如圖3所示。
VR-Forces是一個開放的仿真平臺,通過VR-Forces API,創建集成定義的傳感器、控制器和執行器組件,用戶可以修改現有實體的行為、模型和創建新的實體行為、模型。
1.3 半實物仿真分系統
1.3.1 無人車仿真節點
無人車仿真節點主要包括地面站模塊、模擬器模塊和無人車半實物控制組件三部分,基于VR-Forces設計實現。
地面站模塊:模擬無人車群的指揮角色,主要用于進行初始任務規劃、指揮命令信息下達等功能。
模擬器模塊:針對Pixhawk自動駕駛儀的主要功能,設計構建無人車的其他核心算法,包括路徑規劃、行進路徑計算、協同攻擊算法等。模擬器模塊與自動駕駛儀匹配,形成一個完整系統的無人車模型,實現仿真平臺中無人車作戰運用全過程仿真。
1.3.2 Pixhawk自動駕駛儀
Pixhawk是一款基于ARM芯片的開源自動駕駛儀,采用模塊化設計,兼容多種類型的硬件設備,支持支持運行PX4固件和APM固件。PX4是Pixhawk的原生固件,專門為Pixhawk開發的一款開源自動駕駛儀軟件。PX4可以控制許多不同的車輛框架/類型,包括:飛機(多翼飛機,固定翼飛機和VTOLs),地面車輛和水下車輛。
PX4自動駕駛儀支持HIL(Hardware-in-the-Loop,硬件在回路)運行模式,在這種模式下,正常的PX4固件在真實的控制器硬件上運行。這種方法的優點是可以在真實的硬件上執行大多數實際的控制代碼。PX4自動駕駛儀和模擬器(位于無人車仿真節點)通過地面站(位于無人車仿真節點)實現控制命令和車輛狀態的數據轉發,PX4自動駕駛儀通過MavLink協議向外發送駕駛控制量(油門、方向、制動),接收車輛狀態數據;模擬器通過TCP/UDP網絡端口接收駕駛控制量,向外發送車輛模擬狀態;地面站通過MavLink協議向PX4自動駕駛儀上傳飛行航路,控制PX4自動駕駛儀的飛行模式。
2? 混合仿真平臺通信機制設計與應用
2.1 設計思路
VR-Forces和PX4自動駕駛儀都采用了類似于機器人的傳感器-控制器-執行器組件結構,VR-Forces側重于戰場環境下的兵力對抗,PX4自動駕駛儀側重于單個實體的運動控制。通過MavLink協議將PX4自動駕駛儀接入到VR-Forces的組件結構中,創建PX4自動駕駛儀的代理控制器,PX4自動駕駛儀為VR-Forces提供無人車運動駕駛控制指量,VR-Forces實現PX4自動駕駛儀所需的地面站功能和模擬器功能,為PX4自動駕駛儀運動提供控制指令和運動模擬狀態數據,可實現無人車的混合仿真系統。如圖4所示。
2.2 自動駕駛儀通信設計
PX4自動駕駛儀與計算機通過USB串口連接,采用MAVLink通信協議。為實現自動駕駛儀的HIL模式仿真,具體通信數據如表1所示。
2.2.1 自動駕駛儀工作狀態監控
自動駕駛儀工作狀態監控功能通過心跳(HEARTBEAT)消息,在MAVLink網絡上發現自動駕駛儀的存在,以及系統和組件id、車輛類型、組件類型和控制模式,判斷無人車能否開展仿真,以及在仿真過程中PX4系統的意外通信中斷等情況。
2.2.2 無人車路徑
自動駕駛儀支持多種控制模式,如手動模式、任務模式及返回模式等。在執行任務模式前,必須向無人車上傳行動路徑,行動路徑由關鍵點組成,關鍵點包括位置、執行命令信息。圖5為無人車仿真過程中上傳消息流程。
2.2.3 無人車模式設置
控制模式定義了自動駕駛儀如何響應用戶輸入和控制車輛運動。在作戰推演仿真中,實體的行為由任務驅動,如沿路徑運動任務、開火任務等,所以VR-Forces和PX4的混合仿真中主要采用任務控制模式。任務控制模式執行已上傳到自動駕駛儀的無人車路徑。
2.2.4 執行器控制
執行器控制是自動駕駛儀向外輸出的控制信號,在真實的無人車上,控制信號通過油門、方向和制動直接作用于車輛的動力系統、轉向系統和制動系統。在仿真中,通過HIL_ACTUATOR_
CONTROLS消息將控制信號輸出,運動模型(在VR-Forces中是執行器組件)根據輸入參數,執行動力學解算。
2.2.5 無人車仿真狀態
在真實的無人車上,自動駕駛儀通過定位器、陀螺儀、磁力計等傳感器設備感知當前車輛的狀態,并實時調整執行器控制輸出。在仿真中,模擬器(運動模型)通過動力學解算無人車的位置、姿態、速度和加速度參數,由HIL_STATE_QUATERNION消息發送給自動駕駛儀。
2.3 無人車半實物控制組件設計
通過設計新的VR-Forces控制器組件,可以將自動駕駛儀和通信接口與VR-Forces集成。控制器組件包含初始化、更新計算和退出三部分,無人車半實物控制組件的功能如下所示:
2.3.1 初始化
組件的初始化函數init()在實體創建時刻調用,用于初始化組件運行所必須的內容,注冊任務回調,綁定輸出端口。在無人車半實物控制組件中,執行以下初始化內容:①查找自動駕駛儀連接串口,設置串口參數,打開串口;②創建MAVLink連接,啟動MAVLink消息處理線程,等待第一個MAVLink心跳消息;③設置自動駕駛儀為HIL仿真模式;④查詢自動駕駛儀當前狀態,如當前是解鎖狀態,則對自動駕駛儀加鎖;⑤注冊沿路線運動任務(Move Along Task);⑥注冊控制執行器的油門、方向、制動輸出端口。