TEQC在鐵路工程測量中的應用
2020-08-06 03:04:24湯偉堯
鐵道勘察 2020年4期
湯偉堯
(中鐵第一勘察設計院集團有限公司,陜西西安 710043)
科學技術的發展日新月異,空間信息技術更是朝著多元化、實用化的方向不斷發展。關于海量空間信息的獲取手段,目前發展較為成熟的系統包括我國已基本建設完成的北斗全球定位系統(BDS)、美國GPS系統、俄羅斯GLONASS以及歐盟GALILEO系統。這些GNSS全球導航定位系統都為用戶提供了海量、高精度、高分辨率的時空信息,并且已經成功應用于各個行業和領域。其中,在鐵路建設的勘察設計、施工運營等階段應用較為廣泛。
關于多源海量空間位置信息,其全生命周期一般經過數據采集、數據預處理和數據處理與分析三個重要過程。其中,數據預處理至關重要(主要包括數據編輯、加工和整理)。預處理工作是否完善,對后續數據平差計算以及平差結果的精度將產生重要的影響[1]。目前,鐵路工程測量中出現GNSS數據質量較差的情況一般都返工重測,而對如何提高其利用率的探討研究較少。以下將研究利用預處理軟件TEQC的強大功能,探討并分析測量過程中出現短暫信號丟失情況時如何對數據進行后處理,從而避免返工重測,提高生產效率。
1 TEQC功能介紹
TEQC是UNAVCO Facility組織開發的用于GNSS觀測信息預處理的軟件[2],相較于其他預處理軟件,其功能較多,使用命令簡單易懂,既可以檢核分析雙頻接收機的靜態觀測信息,也可以用于研究動態數據質量。其原理主要是利用GNSS觀測信息的偽距和載波相位信息進行線性組合,從而實現對GNSS數據的誤差估計[3]。TEQC主要功能包括:格式轉換(Translate)、數據編輯(Edit)、質量檢核(Quality Check)和單點定位(Coordinate)[4]。以下主要研究TEQC的數據編輯和質量檢核功能。
1.1 質量檢核
質量檢核一般有lite模式和full模式(常用模式為full)。full模式:需要o文件和n文件,命令為teqc+qc -nav source. *.*n source.*.*o,執行后文件夾里將產生9個文件。其中*.*S是分析結果匯總文件;*.ion是L1/L2電離層延遲;*.iod是電離層延遲的變化率;*.mp1是L1載波上的碼信息多路徑觀測誤差;*.mp2是L2載波上的p碼多路徑觀測誤差;*.sn1是L1觀測值的信噪比;*.sn2是L2觀測值的信噪比;*.ele是衛星高度角;*.azi是衛星方位角。
對數據質量分析主要包括四點。
(1)數據完整性:數據完整性代表了實際觀測歷元和理論預計歷元的比值(possible obs/complete obs),也就是預期歷元數和實際歷元數的比值。
(2)多路徑誤差分析:MP1和MP2主要用于分析GNSS接收機周圍環境是否造成多路徑效應,進而評價觀測環境的質量。其計算公式為

(1)

(2)

(3)

(4)
(5)
上式中,P1和P2分別代表L1和L2載波上的測距碼;φ1和φ2顯示載波相位觀測值;M1和M2是雙頻偽距的多路徑效應;m1和m2是雙頻載波相位的多路徑效應;n1和n2是整周模糊度;f1和f2是頻率;λ1和λ2是波長;假如沒有產生周跳,B1和B2是常量,m1、m2遠小于M1和M2;α是L1、L2波段頻率之比的平方。
(3)信噪比(SNR):信噪比主要用于分析接收信息與高度角變化的關系,還可以分析評價接收機對高度角較低衛星信號的追蹤接收能力。
(4)觀測歷元數與周跳數的比值(o/slps):經常用CRS=1 000(o/slps)表示。
(5)電離層延遲微分周跳(IOD):一般用這個指標來衡量相位觀測值中是否存在周跳,如果IOD變化率大于400 cm/min,應對其進行重點關注,有

(6)
根據IGS跟蹤站的數據統計,一般要求MP1<0.5,MP2<0.75,o/slps>100[5]。
1.2 數據編輯
常見的合并功能應用于將多日數據分割成單日文件,也可以將單時段數據進行合并,形成一個長時間序列的觀測文件。通過給定一個時間范圍,可以對標準格式數據進行該時間窗口的切割。例如:teqc-dm 20 source.**o > result.**o表示截取觀測文件最后20 min數據。如果合并兩個時間段的RINEX數據,可以使用teqc urum.135?.10o>urum.1350.10o。
2 TEQC工程應用實例
以2019年8月3日某鐵路精密工程測量實驗為例。平面坐標系采用2000國家大地坐標系,長半軸為6 378 137,扁率為298.257 222 101。按照高斯窄帶投影的方法建立工程獨立坐標系,滿足規范中投影變形不大于10 mm/km的要求[6-8]。本實驗研究范圍中央子午線為103°,投影面大地高為2 610 m。截止衛星高度角設置為15°,數據采樣率為15 s,PDOP小于等于6,觀測時間長度為120 min。其中, CPI57-1點在一個時段中陸續停電3次,測試具體概況如表1和表2所示。
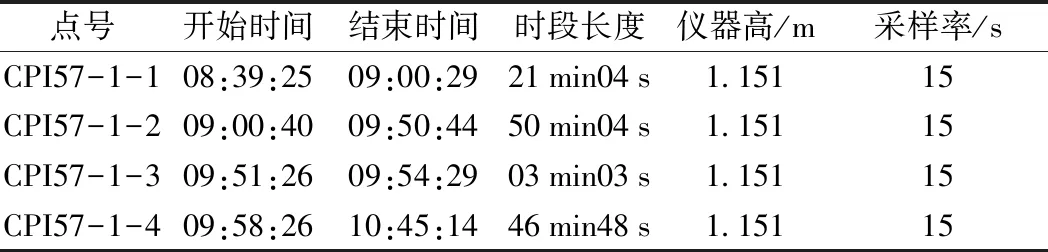
表2 CPI57-1四個時段概況
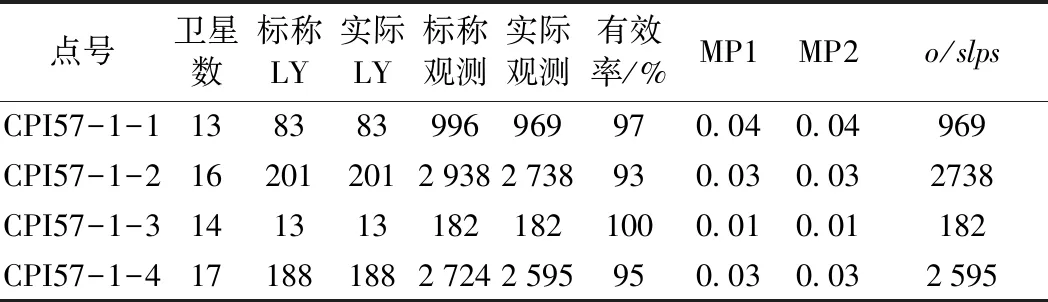
表1 CPI57-1四個時段數據質量檢核
執行teqc+qc -nav CPI02150.19o CPI02150.19n,得到每一時段的匯總報告文件。其中包含的參數信息有每顆衛星的接收數據情況、觀測時間、首歷元、末歷元、MP1(L1載波的多路徑影響)、MP2(L2載波的多路徑影響)、SN1(L1載波的信噪比)、SN2(L2載波的信噪比)、IOD(電離層延遲變化率)、ION(電離層延遲誤差)、AZI(方位角)、ELE(衛星高度角)。由表1可以看出,四個時段的衛星數都多于10顆,觀測條件良好;根據一般性原則,重點關注MP1和MP2,如果其值分別小于0.35和0.45,說明站點周圍的多路徑影響效應較弱[9-12],本研究中的MP1和MP2遠小于限差值,數據有效率都在90%以上,說明多路徑、遮擋以及電磁干擾等影響非常小。
由表2可以看出, CPI57-1點第一時段和第二時段相差只有11 s,由于靜態測量中設置的采樣率為15 s,所以斷電小于15 s的情況下觀測數據的損失很小。第二時段和第三時段間斷42 s,丟失3個歷元的數據,其影響也相對較小。第三個時段和第四個時段間斷時間相對較長(共有3 min57 s的間斷時間),相對觀測數據損失較多。鑒于觀測過程中間斷時間短暫,采樣率、儀器高等參數不變,故利用TEQC的文件合并功能,執行teqc file1 file2>myfile,將以上四個時段數據合并為一個文件。
為了研究合并后數據的可用性,將CPI57-1點與其他點組成基線,并且同步觀測6次,以進行對比分析。觀測數據的基線解算采用徠卡隨機商用軟件LGO8.4。重復基線、閉合環檢驗、整網平差計算利用武漢大學研制的COSAGPS軟件。圖1為CPI57-1與其他點位的位置分布。
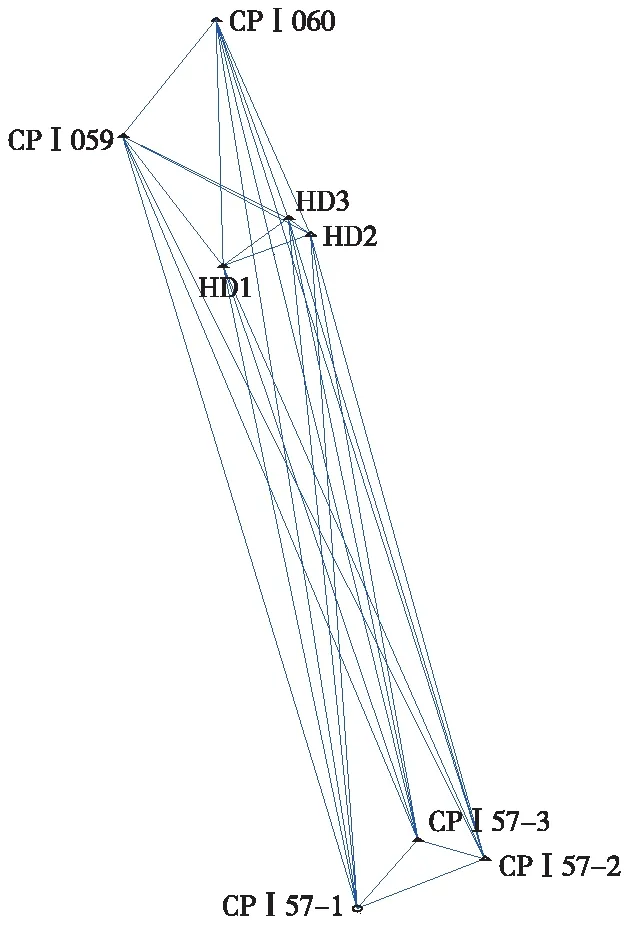
圖1 CPI57-1與其他點位位置關系
2.1 異步環統計
根據工程測量規范及要求,外業觀測結束后,首先對基線進行處理和質量分析,然后對重復基線、環閉合差進行檢驗,獨立觀測過程中的異步環坐標分量也要符合相關規范中的技術指標[8],如表3所示。

表3 基線向量環閉合差限差
對6次獨立平差的基線向量網獨立環閉合差進行計算,其獨立環最大閉合差統計結果如表4所示。

表4 閉合環最大閉合差 mm
由表4可以看出,與CPI57-1組成的基線向量網中,各獨立環的最大閉合差在X、Y、Z以及基線長度分量上都能滿足限差要求,說明合并后的數據質量相對較好。
2.2 重復基線較差統計

表5 重復基線最大較差 mm
2.3 三維自由網平差

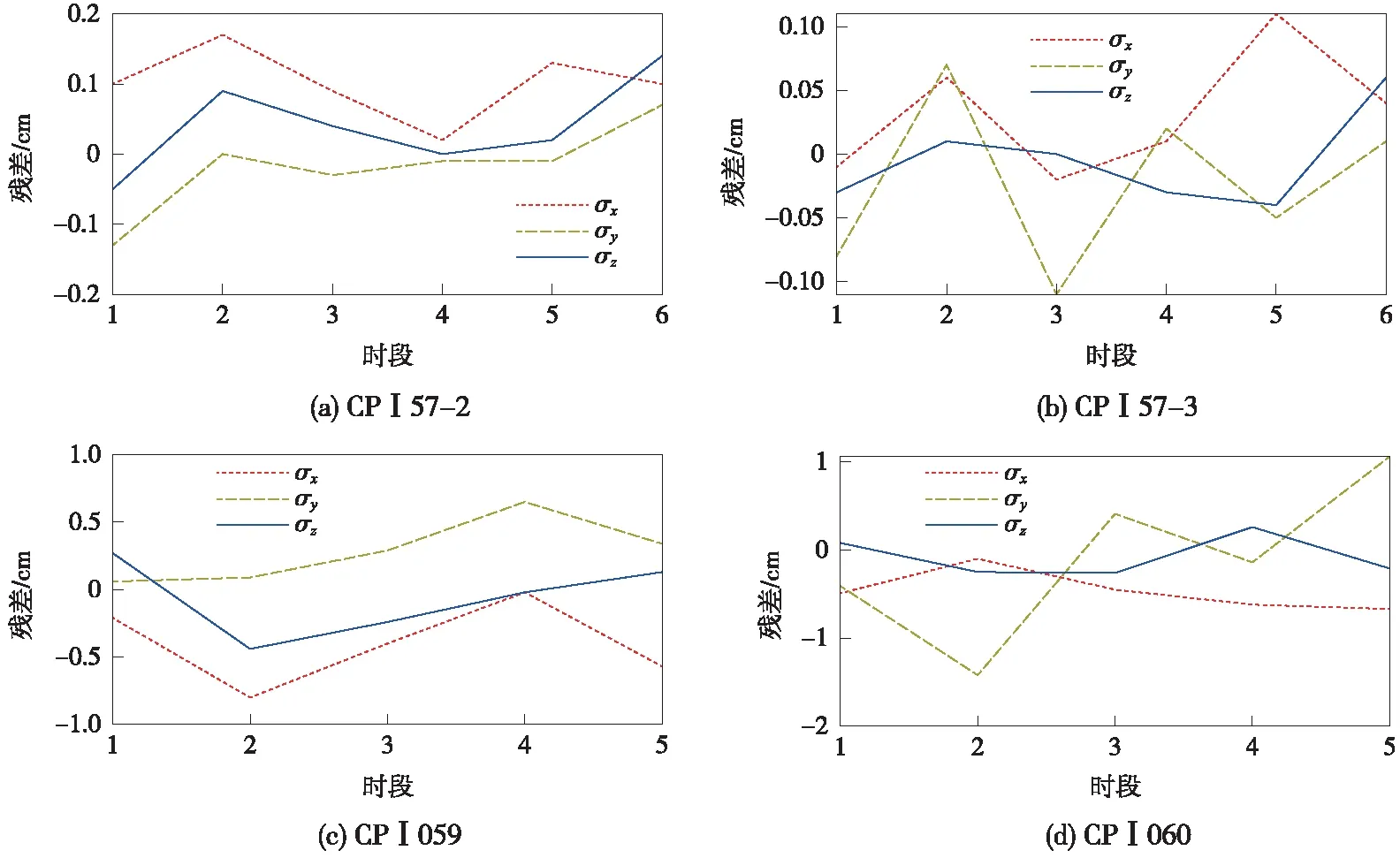
圖2 同一組基線不同時段三維基線向量殘差對比
由圖2可以看出, CPI57-1參與構成的基線向量6個時段的基線向量殘差互差都比較小。其中,CPI57-1—CPI57-2規范要求限差為1.51 cm,CPI57-1—CPI57-3限差為11.51 cm,CPI57-1—CPI059限差為5.6 cm,CPI57-1—CPI060限差為5.79 cm。與CPI57-1有關的三維基線向量殘差都小于限差。
2.4 二維約束平差
選擇相同的起算點,得到6個時段CPI57-1的二維約束平差值,如表6和圖3所示。
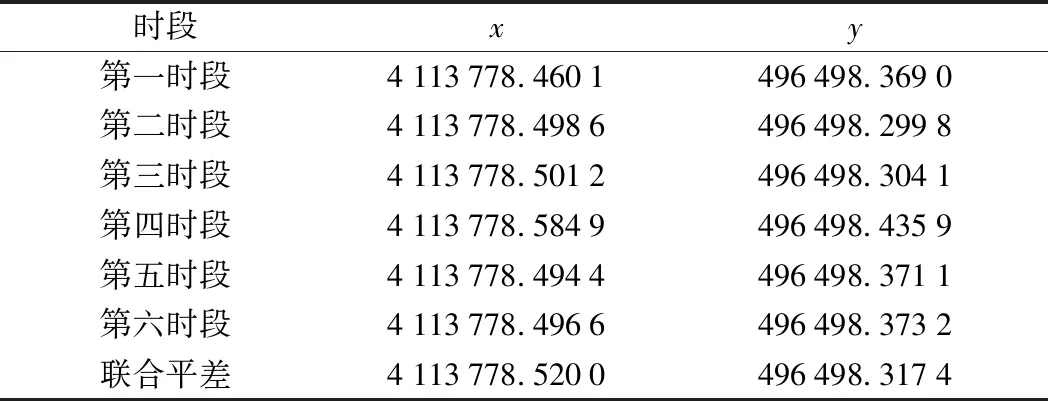
表6 不同時段二維約束平差坐標 m
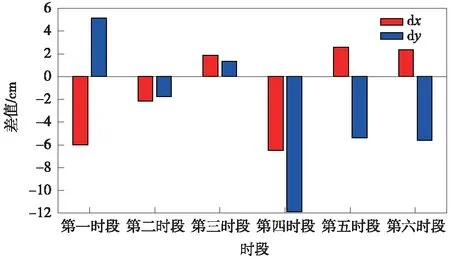
圖3 不同時段二維約束成果對比
由表6和圖3可知,將6個時段聯合平差的結果作為參考值,將每個時段的二維約束平差值與其進行對比,可以看出第一時段和第四時段解得的CPI57-1坐標差相對較大。由于第一時段的數據為多個斷開時段合并的數據,多余觀測較少,且第一時段觀測過程中該點位周邊車輛和人員來往較密集,致使觀測點位穩定性較差,故第一時段CPI57-1點位精度較差。第四時段可能是由于數據采集過程中多路徑影響或者衛星星況較差造成的:在該區域內,18:00~19:00時間段內PDOP值較大,鎖星情況不好。此外,在聯合平差時,若將6個時段數據同時平差,可能會將觀測時段不好的數據引入,造成第一和第四時段相對精度較低。由于每個時段解算的數據都是單時段,所以多余觀測較少,精度較弱,但是整體來看,TEQC合并后的數據延長了同步觀測時間,優化了觀測數據質量,解算的點位坐標精度能夠滿足工程測量的要求。
3 結論
基于TEQC軟件強大的質量檢核和數據編輯功能,對GNSS接收機在現場測量中由于各種復雜原因出現的短暫數據丟失情況進行后處理。對比分析表明,經TEQC處理后的數據能夠延長同步觀測時間,滿足工程測量基線解算要求,解算的基線和平差后的點位精度符合鐵路工程測量的要求,不僅可以避免不必要的返工測量,提高工程測量的效率,節約成本,而且對于優化基線解算和網平差也有著重要的意義。
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生殖健康(2019年2期)2019-08-23 08:12:08
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車觀察(2016年3期)2016-02-28 13:16:26