改進Alexnet的滾動軸承變工況故障診斷方法*
2020-08-06 01:14:00趙小強張青青
振動、測試與診斷 2020年3期
趙小強, 張青青
(1.蘭州理工大學電氣工程與信息工程學院 蘭州,730050) (2.甘肅省工業過程先進控制重點實驗室 蘭州,730050)(3.蘭州理工大學國家級電氣與控制工程實驗教學中心 蘭州,730050)
引 言
滾動軸承是旋轉機械設備中的關鍵部件,因其承受沖擊的能力較差,以致每年約30%的機械故障是由滾動軸承故障引起[1]。因此,對滾動軸承進行更精確、更智能的故障診斷,對進一步保證旋轉機械設備的可靠運行有極其重要的作用。國內外80%的滾動軸承故障診斷方法是基于滾動軸承的振動信號[2],但其采集的振動信號均有非平穩、非線性的特性[3]。另外,僅從時域或者頻域人工提取的特征難以全面地表征滾動軸承的故障特性,故學者們又利用從時頻域提取的故障特征進行滾動軸承的故障診斷,常有小波分解[4]、經驗模態分解[5](empirical mode decomposition, 簡稱EMD)及共振稀疏分解[6]等時頻域特征提取方法。其中,小波分解方法由于自身缺乏自適應性,其光芒逐步被具有自適應性的EMD方法所遮蓋。但是EMD方法存在著模態混疊和邊緣效應的問題,雖然集成經驗模態[7](ensemble empirical mode decomposition, 簡稱EEMD)方法對其進行了一定的改進,但是EEMD在分解過程中因受到分解次數和加入噪聲幅值的影響以及篩選條件和分解層數的限制,使其分解結果中存在虛假分量,且會使計算量急劇增加。共振稀疏分解方法由于存在參數的最優選擇、抗噪性不強及多成分分離等問題,還有待進一步優化改進。隨著人工智能技術的發展,學者們也逐漸利用反向傳播神經網絡[8](back propagation neural network, 簡稱BPNN)、支持向量機[9](support vector machine, 簡稱SVM)及隱馬爾科夫[10]等方法進行滾動軸承的故障診斷,雖然它們具有一定的非線性擬合能力,但因過于簡單的結構而使它們的自學習能力非常有限,所以還需要人工提取的故障特征作為支撐。
深度學習的概念是特征提取以及模式識別領域一次質的飛躍,可以獲得深層次的特征表示,免除了人工選取特征的繁復冗雜和高維數據的維度災難問題[11]。有學者嘗試使用深度神經網絡進行滾動軸承的故障診斷研究[12],但因未充分發揮深度學習的潛力,在一定程度上仍不能擺脫復雜信號處理技術的干涉[13],現仍處于起步階段[14]。在滾動軸承故障診斷中,有深度置信網絡[15](deep belief network, 簡稱DBN)、深度自編碼[16](deep auto encoder, 簡稱DAE)、卷積神經網絡[17-18](convolutional neural network, 簡稱CNN)和循環神經網絡[19](recurrent neural network, 簡稱RNN)等深度神經網絡。其中,CNN作為第1個較完整意義上的深度神經網絡,具有局部感受野、權值共享和次采樣三大特性,解決了深度神經網絡計算量大、計算耗時的問題。Janssens等[20]利用旋轉機械振動信號的頻譜和3層CNN實現了旋轉機械的軸承外環故障、軸承潤滑油缺失、轉子不平衡和軸承正常4種狀態的診斷,其診斷精度高于傳統的基于特征學習的方法。Guo等[13]提出了一種學習率自適應的5層卷積神經網絡ADCNN,對滾動軸承不同位置和不同損傷程度的10類故障進行診斷,但是診斷過程分步進行,且需要訓練多個不同的ADCNN才能實現,致使訓練過程繁雜。Chen等[18]利用改進的5層CNN和不同負荷下振動信號的時頻特征實現了對不同負荷下的滾動軸承不同位置和不同損傷程度的10類故障的診斷。雖然上述文獻均表明了CNN在滾動軸承故障診斷中的可行性,但因其使用易使深度神經網絡發生梯度彌散現象的sigmoid作為激活函數,且沒有涉及如何提升其方法泛化能力和防止過擬合等問題,因此所提出的滾動軸承故障診斷方法并沒有極大地發揮出深度神經網絡的功效。
基于此,筆者提出一種改進Alexnet的滾動軸承變工況故障診斷方法。在不依靠復雜信號處理技術的前提下,直接通過從原始振動信號中自動提取深層特征來實現對強噪聲、變負荷下滾動軸承的故障診斷,并通過真實的滾動軸承狀態數據驗證了本研究方法的有效性。結果表明,本方法較傳統方法具有更強的魯棒性和更高的診斷精度。
1 Alexnet模型
1.1 Alexnet模型結構
Alexnet相對于5層CNN,具有更深的網絡結構,已用于圖像識別、圖像檢索及語音識別等領域,它的結構參數可根據待解決問題的難易程度進行調整精簡。相對于具有1 000類別的ILSVRC圖片集,十幾個類別的滾動軸承故障診斷屬于低類別的辨識,故可以在避開需要百萬級數據樣本和多個GPU并行運行的要求下,通過將Alexnet的深層網絡結構精簡及運用它所囊括的部分新技術來解決滾動軸承故障診斷問題。圖1是一個由5層卷積層、3層池化層、3層全連接層構成單處理器結構的Alexnet模型結構圖。其中,輸入層是二維的拓撲結構,輸出層為單層神經元,維度為待分類類別的數目。Ci(i=1,2,…,5)為第i卷積層,Si(i=1,2,5)為第i池化層,FCi(i=6,7,8)為第i全連接層,并且FCi均為單層神經元映射結構。長方體的長代表卷積層的卷積核個數,寬×高代表經卷積操作所得的特征圖尺寸,錐體的底面長×寬代表卷積核尺寸。
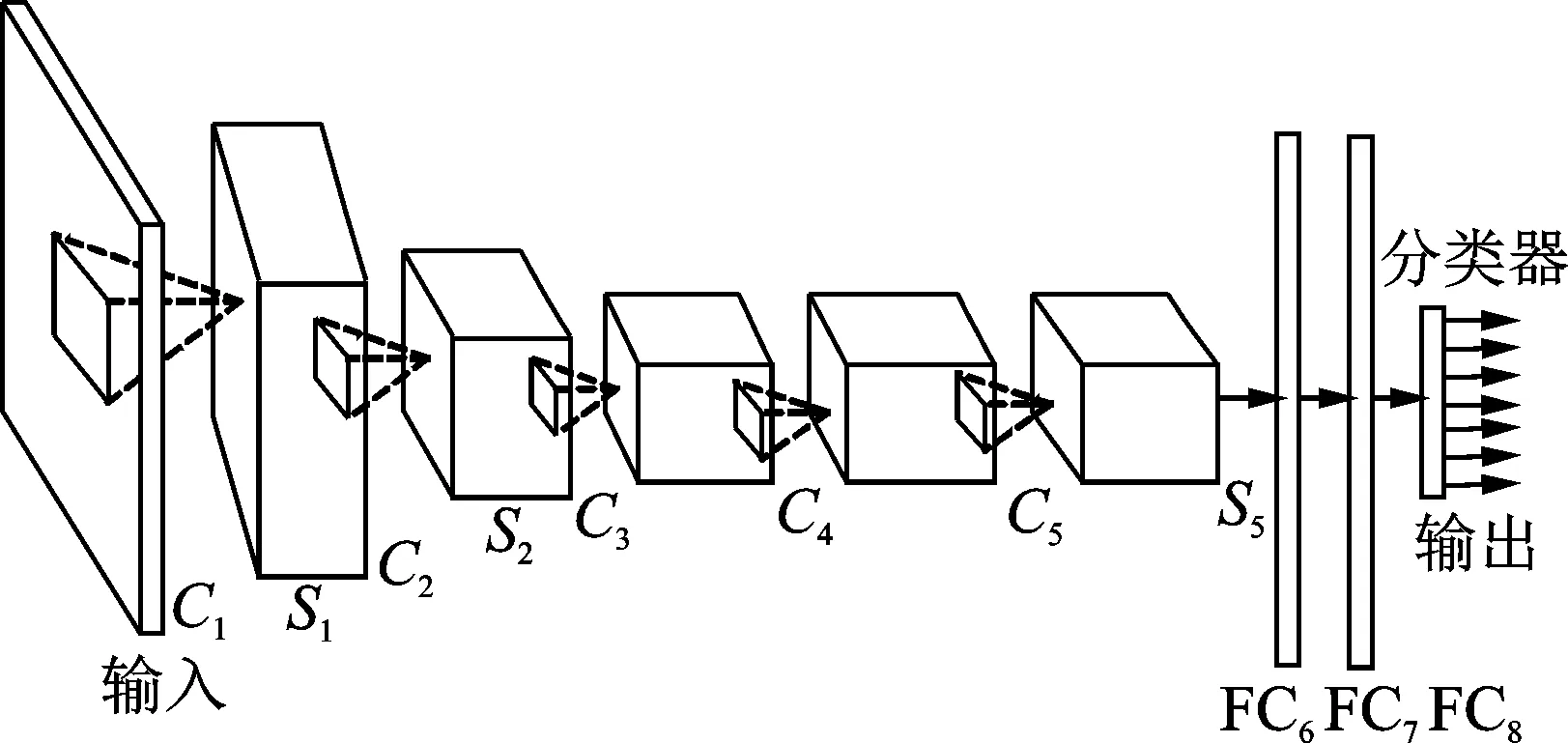
圖1 AlexNet模型結構圖Fig.1 AlexNet model structure diagram
1.2 softmax分類器

(1)
softmax分類器根據由softmax函數所映射的softmax值的大小完成多分類的任務。
2 改進Alexnet的滾動軸承變工況故障診斷方法
筆者針對滾動軸承的復雜工況,結合改進Alexnet強大的自學習能力,自動從滾動軸承的原始振動信號中提取深層特征,實現對強噪聲、變負荷下滾動軸承的狀態辨識,克服了傳統方法中特征提取和模式識別的不足。
2.1 拓撲結構的輸入
本研究表征滾動軸承狀態的振動信號是隨著時間變化的一維數據,為滿足滾動軸承故障診斷模型的輸入需求,文獻[18]提出將一維振動信號按縱向插樣構建為滿足滾動軸承故障診斷模型輸入的二維特征圖,但是忽略了滾動軸承的振動信號具有時序性的問題。有學者通過時頻變換得到二維頻譜作為輸入,但其丟失了卷積運算時時域信號的關聯性。針對上述不足,筆者將一維振動信號按橫向插樣構建為二維特征圖,以400點的一維振動信號為例,數據點的值為某時刻振動信號的幅值,400點的振動信號按順序依次插入20行20列的二維矩陣中,進而形成滿足滾動軸承故障診斷模型輸入的特征圖。
圖2代表按不同插樣方法構建的特征圖。假設卷積核的尺寸為3,移動步長為1,對比圖2(a)和(b)可以看到,在卷積核沿圖中所標注的不同顏色的局部感受野橫向滑動的過程中,圖2(a)中的特征圖的序號差更小,更能凸顯滾動軸承振動信號的時序性,并且在特征從第5層的池化層轉移到全連接層時會對特征圖重構。相對于圖2(b)中藍色區域是亂序的,圖2(a)中藍色區域是整序排列的,這對于及時診斷出滾動軸承的故障狀態極為有利。
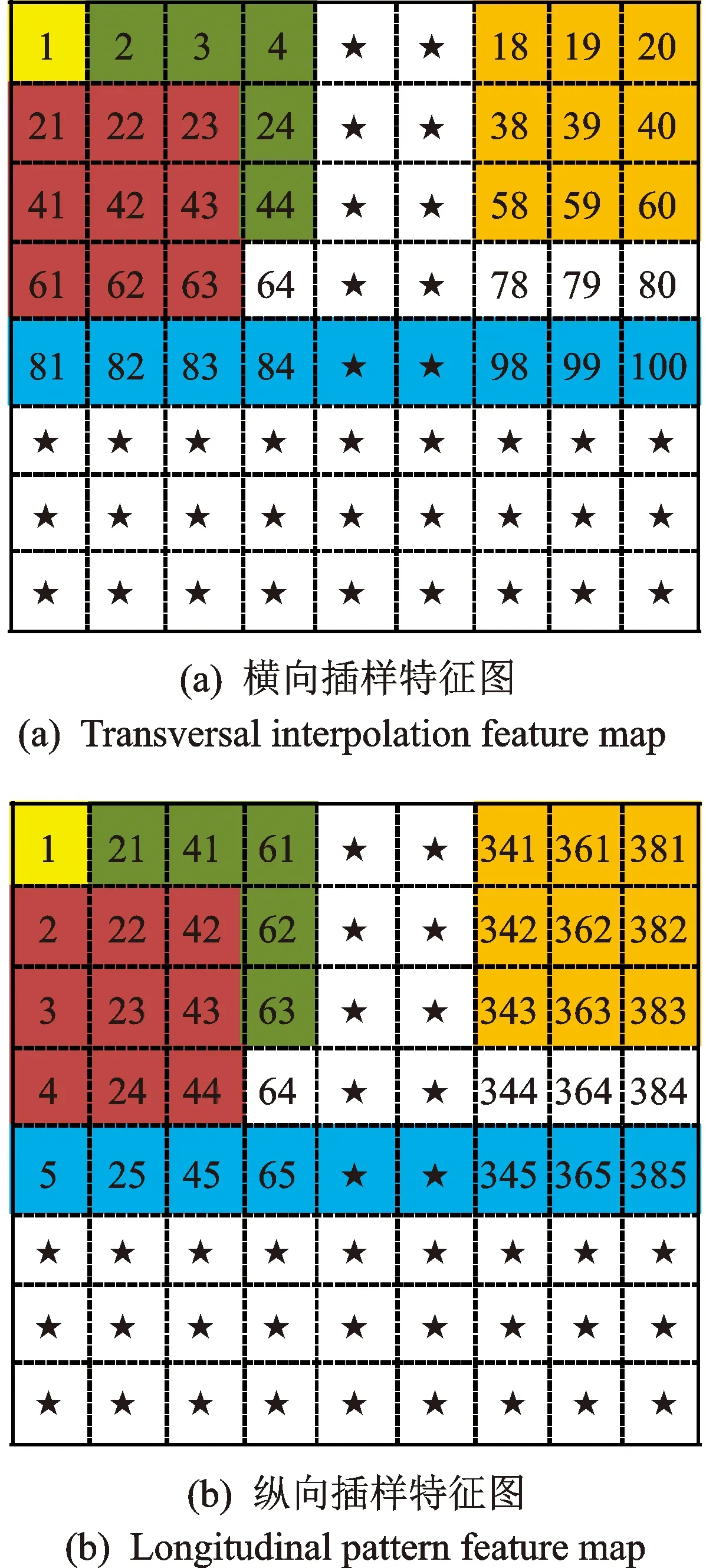
圖2 兩種特征圖Fig.2 Two kinds of feature maps
2.2 卷積層
本研究采用互相關函數代替卷積運算,可避免卷積核K和輸入I的翻轉,但不影響計算結果,即
(2)


(3)

(4)
其中:f(·)為Relu激活函數。
2.3 卷積層的功能層
CNN在特征提取和特征映射過程中,為減少數據運算量,增加網絡泛化能力,通常會在部分卷積層之后添加池化層及不同的歸一化層等,這里將其統稱為卷積層的功能層。筆者對Alexnet卷積層的功能層進行改進調整,將先局部歸一化再池化的步驟,調整為先池化再局部歸一化。
(is≤i′≤is+wc-1;js≤j′≤js+wc-1)
(5)
其中:s為池化移動步長;wc為池化區的寬度,且wc>s。
(6)
其中:k,α,β,m為超參數,可依次取值為2,0.75,10-4,5;N為第l卷積層卷積核總數。
如此改進有兩大優點:①在池化后局部歸一化既可以增強本方法的泛化能力和防止過擬合現象發生,又能極大地縮減訓練時間;②文獻[21]雖然提到了使池化區的寬度大于池化移動步長的重疊池化方法,但效果甚微,而本研究在局部歸一化前進行重疊池化,不僅可以使池化過程中保留更多的故障信息并弱化冗余信息,而且會加速滾動軸承故障診斷模型訓練過程的收斂速率和進一步增強本方法的泛化能力,凸顯出重疊池化較以往池化法的優越性。
2.4 全連接層
將式(5)中l為5時的所有特征圖重構為一個高維單層神經元結構C5,則第6全連接層第i個神經元的輸入為
(7)


(10)
根據式(1)可得出第8全連接層第i個神經元的輸出qi為
(11)
2.5 基于Adam的權值參數優化
隨機梯度下降算法因學習率固定,導致在訓練過程中損失函數常會高度敏感于某些方向而不敏感于其他方向。為了改善這個問題,筆者采用學習率自適應的Adam進行權值參數優化。
對式(11)得到的樣本I(k)的softmax值qk與實際標簽y(k)的值pk求取交叉熵,作本研究的損失函數L
(12)

(13)
(14)

(15)
(16)
(17)

(20)
(21)
其中:(im,jm)為正向池化操作時池化區特征值最大的特征點。

(24)
(25)

(26)

(27)
更新后的權值θ為
(28)
其中:ε為學習步長;ρ1,ρ2為矩估計的指數衰減速率(默認值為0.9和0.999);δ為用于數值穩定的小常數(默認值為10-8)。
2.6 本研究方法的步驟
本研究方法的具體步驟如下:
1) 采集滾動軸承在某一負荷的不同狀態下的振動信號XTR;
2) 將所有一維振動信號分別按橫向插樣構建為二維特征圖集I;
3) 設置小批量尺寸b,并將二維特征圖集I化分為一系列含有b個樣本的小批量樣本組{(I(1),y(1)),(I(2),y(2)),…,(I(b),y(b))};
4) 設置故障診斷模型的結構參數、學習步長ε及棄權值dp,并訓練基于Alexnet的滾動軸承變負荷故障診斷模型;
5) 從截斷的正態分布中選取參數值來初始化權值,并初始化一階矩變量s、二階矩變量r及時間步t均為0;
6) 選擇一批滾動軸承的小批量樣本{(I(1),y(1)),(I(2),y(2)),…,(I(b),y(b))};
7) 根據式(3)~(11),依照l值從1~8,計算最終的softmax輸出值;
8) 根據式(12)計算損傷函數;
9) 根據式(13)~(28),依照l值從8~1進行權值更新;
10) 若訓練結束則退出訓練,反之t=t+1,并返回步驟6繼續訓練;
11) 若模型具有較好的訓練精度和收斂性能,則保留此時的小批量尺寸b,反之返回步驟3;
12) 若模型具有較好的訓練精度和收斂性能,則保留此時的模型結構參數和學習率ε,反之返回步驟4;
13) 選取棄權值dp;
14) 采集不同負荷的不同狀態下的滾動軸承振動信號XV,將其按步驟2的方式轉換為二維特征圖IV;
15) 利用IV測試棄權值為dp時訓練模型的泛化能力;
16) 若模型具有較好的泛化性能,則保留此時的dp,反之返回步驟4;
17) 使用最終完成訓練的模型進行強噪聲、變負荷下的滾動軸承的故障診斷。
3 實驗與分析
3.1 實驗數據集
本實驗選用美國西儲凱斯大學軸承研究所提供的數據作為實驗數據[22]。實驗裝置臺如圖3所示,由1.470kW電機、扭矩傳感器/譯碼器和測功機組成,此外還包括在圖中并未顯示的電子控制器。電機驅動端深溝球軸承型號為SKF6205,使用電火花放電的方式分別在軸承的外圈、內圈和滾動體上加工單點損傷,損傷直徑分為0.018,0.036,0.053和0.071 cm。其中,軸承外圈的損傷點在3點鐘、6點鐘、12點鐘3個不同位置進行設置。電動機驅動端的軸承座上方放置一個加速度傳感器用來檢測軸承的振動加速度信號,振動信號由16通道數據記錄儀采集得到,采樣頻率為12 kHz,電機所載負荷分別為0,0.746,1.492和2.238 kW。
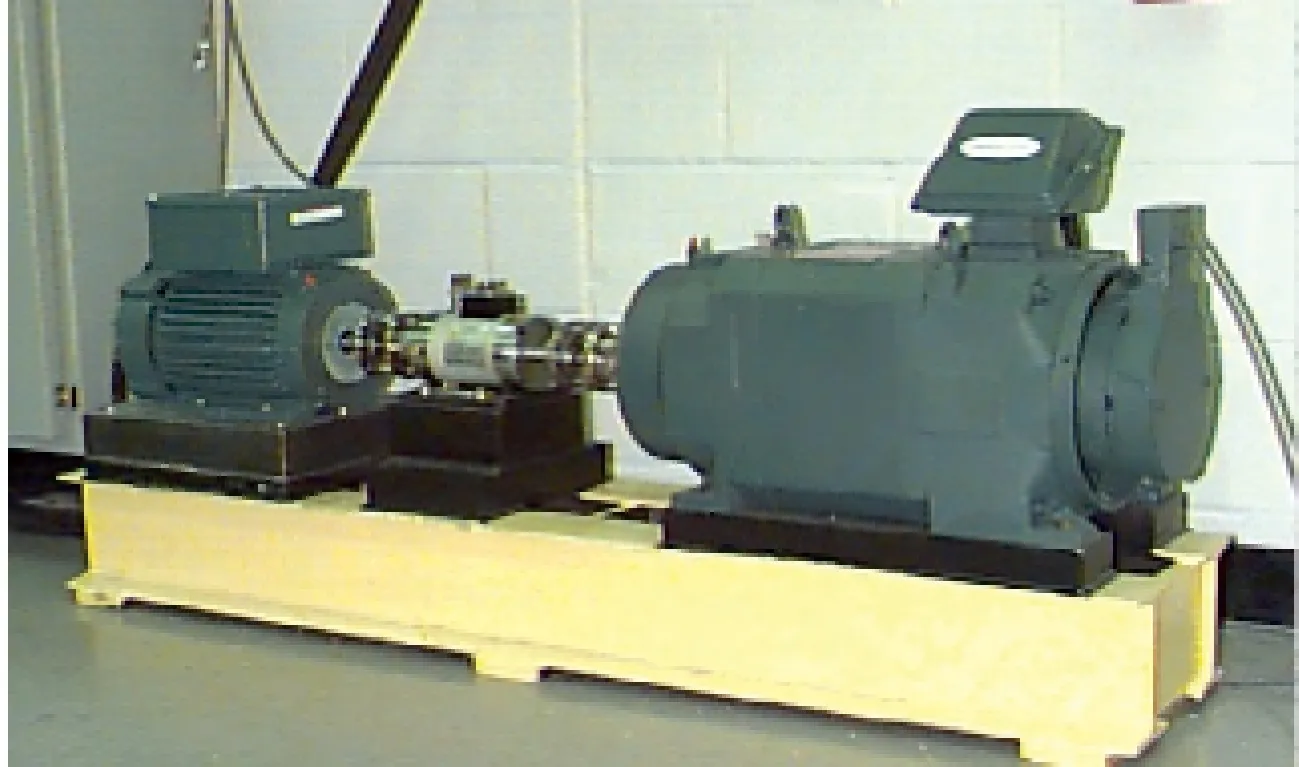
圖3 實驗裝置臺Fig.3 Experimental device table
實驗是在大噪聲環境中,對不同負荷下的滾動軸承處于正常、內圈故障、外圈故障、滾動體故障以及分別有不同故障損傷程度的12類狀態進行診斷。其中,記正常狀態為N,內圈損傷直徑為0.018 cm的狀態為I007,外圈損傷直徑為0.036 cm的狀態為O014,滾動體損傷直徑為0.053 cm的狀態為B021,其他狀態依此類推,損傷點位置不同的外圈損傷狀態按損傷直徑歸為同一狀態,電機的載荷記為負荷0、負荷1、負荷2和負荷3。每個小樣本含784點,每種負荷下的樣本數均按照75%的樣本用于訓練、25%的樣本用于測試的規則劃分,具體各負荷下的訓練樣本和測試樣本數目如表1所列,樣本間亂序排列。
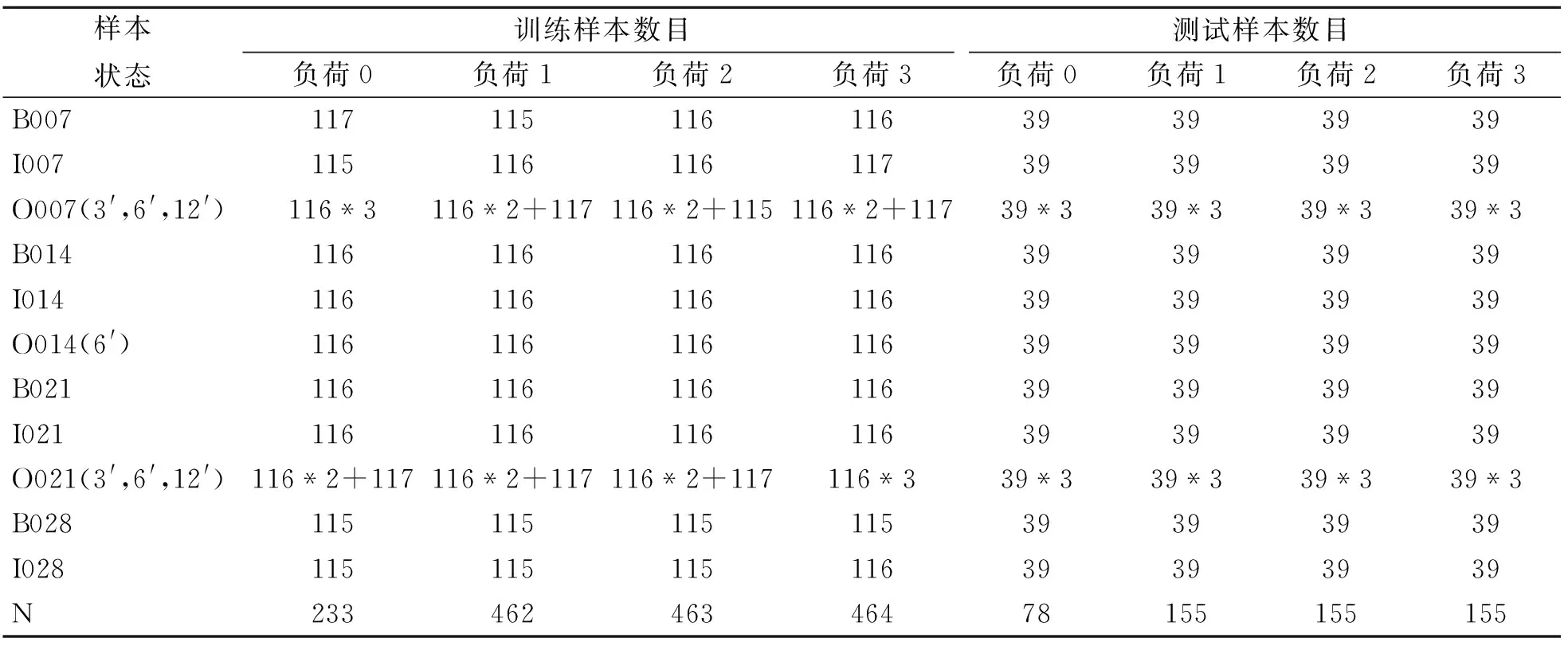
表1 實驗數據集
3.2 本研究方法的模型結構參數選取
在實驗過程中,分別使用一種負荷下的樣本按小批量訓練的方式進行改進Alexnet的滾動軸承變負荷故障診斷模型的訓練,完成模型訓練之后,再分別使用4種負荷下的測試樣本測試模型的性能。所有的樣本訓練及測試過程均是在inter的5核CPU的pycharm平臺上利用python語言實現,使用的深度學習框架是谷歌的tensorflow。其中,改進Alexnet的滾動軸承變負荷故障診斷模型的結構參數等是根據多次實驗的訓練精度或測試精度綜合收斂速率所得。筆者分別以Adam的學習步長、批尺寸、卷積核1的尺寸及棄權值的選擇過程為例進行說明,各參數值的選擇過程遵循單一變量原則,在取不同參數值時,其訓練精度或測試精度的變化趨勢如圖4所示。
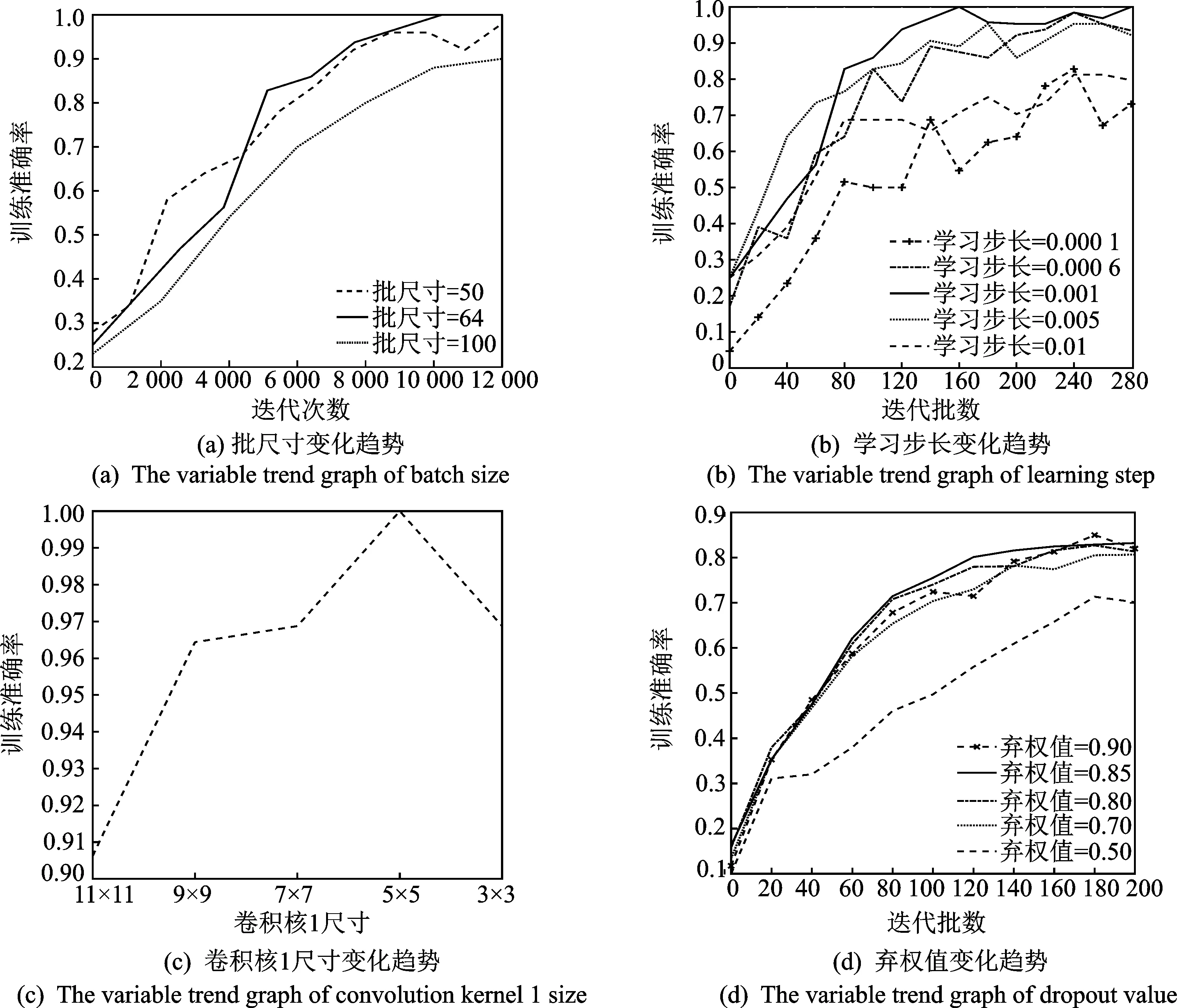
圖4 不同參數的變化趨勢圖Fig.4 The variable trend graph of different parameters
由圖4(a)可以看到,當小批量的樣本數為64時,其訓練精度遠高于小批量的樣本數為100時的訓練精度,并且訓練精度的收斂趨勢相對于小批量的樣本數為50時更加快穩。由圖4(b)可以看到,當Adam的學習步長為0.001時,其訓練精度的收斂速度最快,收斂趨勢更為平穩,并且在相同的迭代批數下的訓練精度最高。圖4(c)反映的是在相同的迭代批數下,以負荷2的訓練樣本進行模型訓練,當卷積核1的尺寸選為5×5時的訓練精度最高,另外在實驗過程中還發現,訓練時間隨著卷積核尺寸的增加而增加。圖4(d)反映的是以負荷2的訓練樣本進行模型訓練,以負荷1的測試樣本進行變負荷測試,當選擇不同棄權值時測試精度的變化趨勢,可以看到當棄權值為0.85時,測試精度收斂的速度最快,收斂趨勢較棄權值為0.9時更為穩定,并且最終的測試精度值最高。由此可知,為盡可能獲得滿意的訓練精度和測試精度,需將Adam的學習步長選為0.01,批尺寸選為64,卷積核1的尺寸選為5×5,訓練過程的棄權值選為0.85。本研究其他的結構參數也按照上述方法所得,其中本研究方法的模型結構參數如表2所示。為使利用本方法在對強噪聲、變負荷下的滾動軸承進行故障診斷時的綜合效果最佳,筆者將訓練過程的迭代批數設為3 125。

表2 本研究方法的模型結構參數
3.3 滾動軸承故障診斷性能的對比分析
為進一步驗證本研究方法的診斷性能,選擇BPNN+EMD,SVM+EMD和Lenet-5進行對比分析。為了避免實驗結果的偶然性,對10次實驗結果求取平均值。由于BPNN和SVM屬于淺層的分類器,很難依靠自身解決復雜的非線性問題,故筆者從采用EMD算法分解的本征模態函數集(intrinsic mode functions, 簡稱IMFs)中,根據相關系數的大小,選取4個最敏感的IMFs,并分別計算出便于滾動軸承故障診斷的特征,包括7個時域特征和16個頻域特征[23],共計92個特征,將其分別與BPNN和SVM結合,實現對不同負荷下滾動軸承的故障診斷。另外,根據多次實驗的效果可知:當BPNN的網絡結構為92-200-12、學習率為0.000 01、迭代次數為30 000時診斷效果最佳;SVM選擇92輸入12輸出的一對多分類方式,因SVM在小樣本訓練時的訓練性能更佳,且在實驗中發現將各訓練樣本的樣本數目依次選為42,42,21,27時診斷效果最佳;Lenet-5的棄權值為0.5,學習率為0.001,3層卷積層的卷積核大小均為5×5,各層卷積核個數分別為32,64和128,池化區寬度為2×2,池化移動步長為2,全連接層的神經元數目分別為6 272和1 024,批尺寸為64,此時的實驗效果最佳。為了進一步保證對比實驗結果的權威性,Lenet-5也采用小批量訓練的訓練方式,訓練批數同樣為3 125。基于4種方法對變負荷下的滾動軸承故障診斷準確率如表3所示。
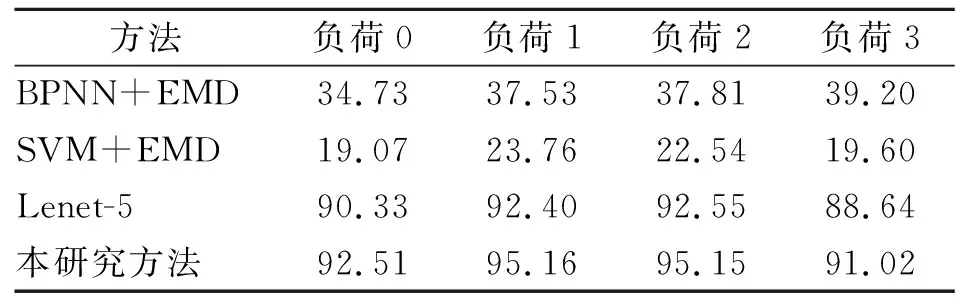
表3 不同方法的故障診斷準確率
由表3可以得到,在沒有噪聲的情況下,基于BPNN+EMD和基于SVM+EMD的人工特征提取方法的測試準確率的平均值分別為37.3%,21.3%左右,大大低于基于Lenet-5和本研究方的測試準確率的平均值91.0%和93.5%。另外,在實驗初始,筆者利用EEMD進行信號的特征提取,但發現其運算時間是EMD的100多倍,這對及時診斷出滾動軸承的故障狀態是極不利的。

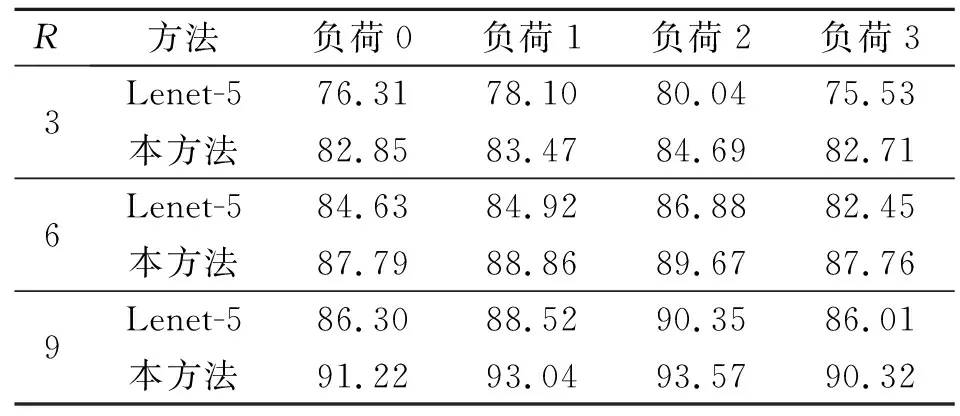
表4 不同方法對XTE的診斷準確率
由表4的對比數據可以看到,當信噪比為6時,無論采用何種負荷進行樣本訓練,利用本方法均可以使其測試精度達到87%以上。以負荷1為訓練樣本為例,隨著信噪比的減小,基于Lenet-5的診斷精確度從92.40%依次下降為88.52%,84.92%和78.10%,而本研究方法的診斷精確度從95.16%依次下降為93.04%,88.86%和83.47%,但仍較前者魯棒性更強。
為進一步觀察在強噪聲、變負荷工況下兩種方法的性能,筆者以信噪比為6的情況為例進行對比實驗,實驗結果直方圖如圖5所示。圖5反映的是在用某一種負荷的訓練樣本進行訓練、用4種不同負荷下的測試樣本進行測試時各自的測試精度的直方圖,直方柱的高度為測試精度值的大小。對比圖5(a)和(b)可知,當信噪比為6時,后者的直方柱的高度整體高于前者,并且較前者更加平穩,進一步說明本研究方法的診斷精度更高,魯棒性更強。
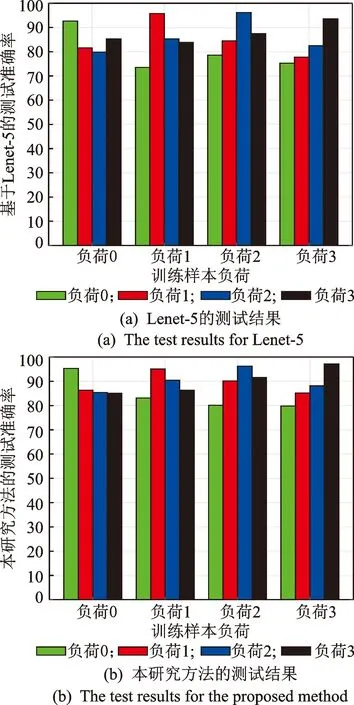
圖5 兩種方法在不同訓練樣本下的測試結果直方圖Fig.5 The histogram of test results under different training samples with two different methods
為進一步明確在強噪聲、變負荷情況下,運用本研究方法對滾動軸承各狀態進行診斷的情況。在信噪比為6時,以負荷2的訓練樣本進行訓練,分別對4種負荷的測試樣本的測試結果做了混淆矩陣圖。其中:橫向坐標為診斷的滾動軸承狀態;縱向坐標為滾動軸承實際的狀態;右側條形棒是某種真實狀態被診斷為某種狀態時的概率值所對應的顏色,概率值越大,顏色越深。現以測試樣本為負荷1的混淆矩陣圖為例,可以清楚地看到,除將41%的B021被誤診為B007,其他狀態均有較高的診斷精度,見圖6。
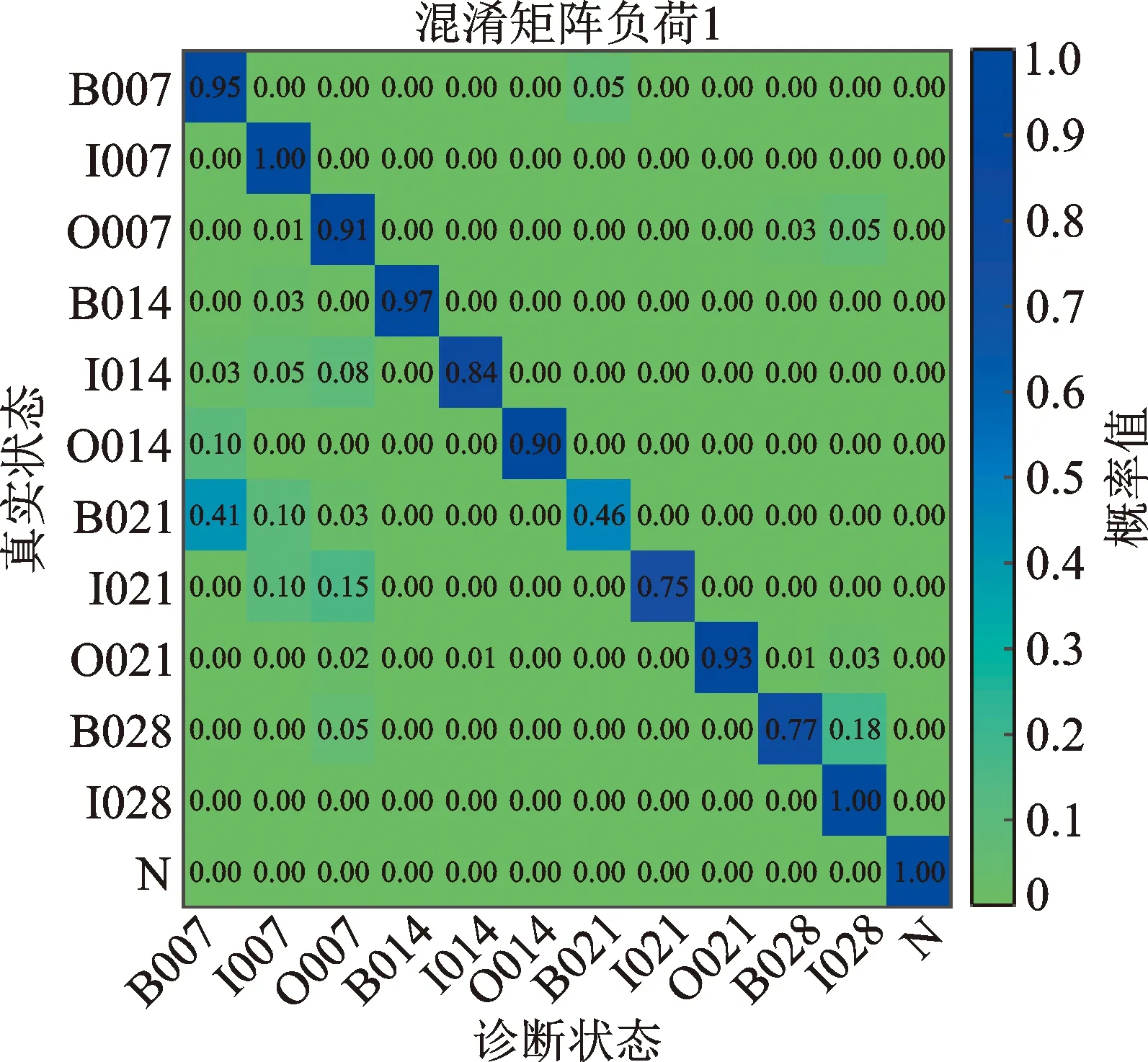
圖6 本研究方法的測試結果混淆矩陣圖Fig.6 The confusion matrix diagram of test results for the proposed method
4 結束語
筆者開展了改進Alexnet的滾動軸承變工況故障診斷方法研究,通過新的數據處理思路在一維時域振動信號處理為二維特征圖時保留了振動信號的時序性和關聯性,并對CNN第2代網絡模型Alexnet加以改進。該方法既可以緩解在人工特征提取過程中,因復雜的信號分解和特征篩選等過程造成信息的不必要丟失而對滾動軸承變工況故障診斷產生累加誤差的問題,又可使以往方法中直接使用原始時域振動信號進行滾動軸承變工況故障診斷性能不穩定的問題得到改善。通過可視圖和直觀的實驗數據表明,在強噪聲、變負荷的復雜工況下,本研究方法較以往方法對多狀態的滾動軸承故障的診斷精度更高,魯棒性更強。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年23期)2014-02-27 14:19:15
