基于激光檢測(cè)技術(shù)的地鐵限界檢測(cè)研究
2020-08-06 00:46:46伍箴樹(shù)
技術(shù)與市場(chǎng) 2020年8期
張 浩,伍箴樹(shù)
(中車株洲電力機(jī)車有限公司,湖南 株洲 412000)
1 概述
隨著地鐵軌道交通的需求日益增加,對(duì)地鐵軌道交通的車輛試驗(yàn)效率與可靠性提出越來(lái)越高的要求[1]。而在眾多試驗(yàn)檢查項(xiàng)目中,地鐵車輛限界是保證城市地鐵安全的極為重要的指標(biāo)。目前,國(guó)內(nèi)地鐵限界檢測(cè)的方法基本采用接觸式測(cè)量。在接觸式測(cè)量中,應(yīng)用最廣的是限界規(guī)龍門(mén)架檢測(cè)。該檢測(cè)方式通過(guò)在支架上安裝的限界檢測(cè)模板,將車輛緩緩從龍門(mén)架中間推過(guò),人工識(shí)別車輛是否與模板產(chǎn)生干涉,以達(dá)到檢測(cè)目的。該方法檢測(cè)設(shè)備須單獨(dú)定制,且不可重復(fù)使用,安裝制作過(guò)程存在誤差,另外操作繁瑣,檢測(cè)不精準(zhǔn),且每次使用之前需要進(jìn)行變形檢測(cè),以免測(cè)量誤差帶來(lái)的誤檢[2]。此種檢測(cè)方法周期長(zhǎng),難以避免人為誤差,對(duì)于超限的部位只能定性判斷,而無(wú)法得到準(zhǔn)確的數(shù)據(jù)分析,最終影響整車的限界檢測(cè)。
區(qū)別于傳統(tǒng)的限界規(guī)模板檢測(cè)方式,三維激光掃描限界檢測(cè)技術(shù)具有以下特點(diǎn):①工作快捷高效,無(wú)需提前定制模板及輔助設(shè)備,基本無(wú)檢測(cè)成本。②可進(jìn)行批量化連續(xù)測(cè)量,直接獲取高精度、高密度車輛斷面點(diǎn)云,獲取的數(shù)據(jù)為車輛所有橫截面的點(diǎn)集合。③可避免人員因素的干擾,同時(shí)避免限界規(guī)可能對(duì)車輛造成的損傷。
目前,基于三維激光掃描技術(shù)的限界測(cè)量分析軟件已實(shí)際應(yīng)用,針對(duì)傳統(tǒng)限界檢測(cè)手段存在的測(cè)量不精確、測(cè)量不全面、檢測(cè)效率低等問(wèn)題,本文基于激光掃描技術(shù)提出高效的地鐵限界檢測(cè)方案。
2 激光限界檢測(cè)的原理及流程
2.1 激光檢測(cè)原理
目前激光限界檢測(cè)的原理基于激光相位測(cè)距法或激光脈沖測(cè)距法,本文利用的激光原理為相位測(cè)距法,其基本的原理如下。
假設(shè)激光經(jīng)往返距離L產(chǎn)生的相位變化為φ,則激光由發(fā)射器到接受目標(biāo)所用的時(shí)間t為:
t=φ/ω=φ/2πf
其中ω——調(diào)制后激光的角頻率,ω=2πf
將以上公式帶入距離計(jì)算公式:
L=(c/2)φ/2πf
其中c——光速
當(dāng)波長(zhǎng)λ>2L時(shí),φ=Δφ;
當(dāng)波長(zhǎng)λ≤2L時(shí),φ=Δφ+2nπ
其中n——波動(dòng)的數(shù)量;
綜上整理得出:
L=(λ/2)(n+△φ/2π)
激光測(cè)距裝置將激光源調(diào)制成固定頻率f的交變光源,通過(guò)被測(cè)目標(biāo)發(fā)射后由光電探測(cè)器接受,通過(guò)測(cè)量調(diào)制光往返的相位變化,從而換算得出距離[3]。
2.2 激光檢測(cè)裝置介紹
激光限界檢測(cè)裝置由測(cè)量裝置、數(shù)據(jù)處理單元、帶升降結(jié)構(gòu)龍門(mén)框架組成。通過(guò)實(shí)時(shí)獲取激光測(cè)距儀和車的距離,作為系統(tǒng)測(cè)量開(kāi)始及測(cè)量結(jié)束的判斷依據(jù),測(cè)量過(guò)程中實(shí)時(shí)記錄車輛距離用于超限輔助定位。
激光測(cè)量裝置由12臺(tái)激光3d檢測(cè)儀組成,主要實(shí)現(xiàn)整車點(diǎn)云數(shù)據(jù)的采集,3d檢測(cè)儀安裝在帶升降結(jié)構(gòu)的龍門(mén)框架上,整體由龍門(mén)框架、步進(jìn)電機(jī)、減速單元、垂直運(yùn)動(dòng)單元構(gòu)成。龍門(mén)架橫梁可以通過(guò)軟件控制進(jìn)行自由多模式上下運(yùn)動(dòng),滿足不同高度車輛的測(cè)試需求。
限界數(shù)據(jù)處理單元由2臺(tái)工控機(jī)組成,主要對(duì)各個(gè)單元進(jìn)行指令控制、功能實(shí)現(xiàn)及數(shù)據(jù)計(jì)算處理,工作模式為連續(xù)測(cè)量模式,數(shù)據(jù)采集速度為5萬(wàn)點(diǎn)/s,單點(diǎn)測(cè)量精度為±1 mm,滿足限界測(cè)量的精度要求。檢測(cè)系統(tǒng)主要組件如圖1、圖2所示。

圖1 激光限界檢測(cè)裝置圖示
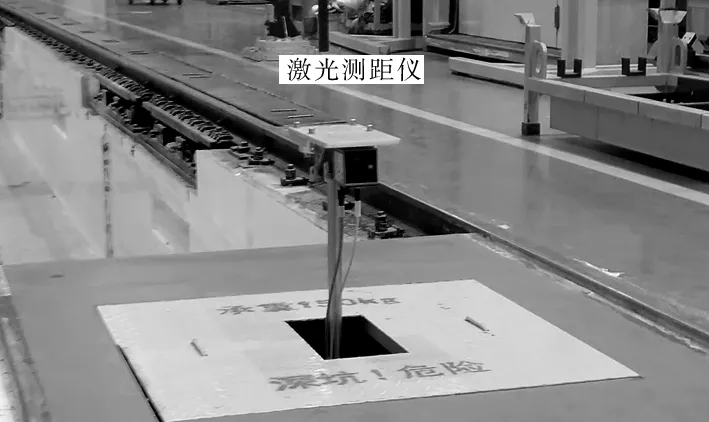
圖2 激光測(cè)距儀圖示
3 激光限界檢測(cè)流程
3.1 檢測(cè)流程
激光限界檢測(cè)操作方法簡(jiǎn)單,只需在限界檢測(cè)軟件中創(chuàng)建工程文件,進(jìn)行項(xiàng)目名稱編輯、預(yù)構(gòu)車輛輪廓、車輛限界、設(shè)備限界等操作,并將工程文件載入檢測(cè)系統(tǒng),即可開(kāi)始限界檢測(cè),操作流程如圖3所示。
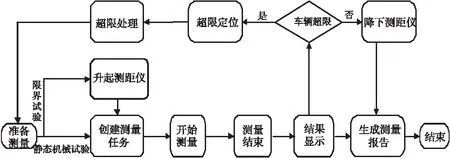
圖3 激光檢測(cè)流程
3.2 數(shù)據(jù)采集
數(shù)據(jù)采集采用連續(xù)測(cè)量工作模式,激光掃描儀將對(duì)車輛斷面進(jìn)行不間斷測(cè)量,獲取的點(diǎn)云數(shù)據(jù)無(wú)需進(jìn)行坐標(biāo)轉(zhuǎn)換和拼接,從而避免了數(shù)據(jù)在累加過(guò)程中造成的誤差[4]。數(shù)據(jù)采集的結(jié)果為車輛的3d輪廓模塊。激光限界檢測(cè)系統(tǒng)通過(guò)安置在地面遠(yuǎn)端定制的測(cè)距儀進(jìn)行車輛的里程數(shù)據(jù)檢測(cè),里程分辨率為0.5 mm,測(cè)量誤差小于0.3%。雖然海量點(diǎn)云數(shù)據(jù)的管理算法已不斷優(yōu)化,但點(diǎn)云處理過(guò)程中,消耗時(shí)間和點(diǎn)云數(shù)量仍呈線性相關(guān),因此,在實(shí)際的限界檢測(cè)數(shù)據(jù)采集時(shí),每間隔1 mm自動(dòng)測(cè)量1個(gè)車輛斷面,但對(duì)于需要重點(diǎn)校核的車輛部位,可根據(jù)實(shí)際條件,選擇合適的斷面間隔進(jìn)行測(cè)量。
3.3 點(diǎn)云降噪
由于檢測(cè)裝置采集數(shù)據(jù)速度快,造成獲得的數(shù)據(jù)中冗余的點(diǎn)云成分大,影響工作效率,需要對(duì)其進(jìn)行降噪簡(jiǎn)化,但是同時(shí)需要保留車輛鮮明的幾何特征。本文采用統(tǒng)一采樣法對(duì)數(shù)據(jù)進(jìn)行壓縮,該方法可減少平坦區(qū)域內(nèi)的點(diǎn)數(shù),但保留高曲率區(qū)域內(nèi)的點(diǎn)以保留細(xì)節(jié)。點(diǎn)云降噪效果如圖4、圖5所示。
圖4 點(diǎn)云數(shù)據(jù)去噪前
圖5 點(diǎn)云數(shù)據(jù)去噪后
4 限界檢測(cè)分析
4.1 最大輪廓橫斷面提取分析
地鐵車輛限界測(cè)量的分析對(duì)象為車輛的準(zhǔn)靜態(tài)包絡(luò)線與車輛限界,所需提取的橫斷面包括車輛所有的輪廓斷面的集合,最終完成最大車輛準(zhǔn)靜態(tài)包絡(luò)線的提取[5]。本文使用的專業(yè)限界分析軟件能夠根據(jù)點(diǎn)云數(shù)據(jù)集完整提取所需最大橫斷面,并以車輛限界為基礎(chǔ),自動(dòng)測(cè)量橫斷面距車輛限界節(jié)點(diǎn)最近的點(diǎn)間距。如圖6所示,將車輛限界導(dǎo)入軟件中進(jìn)行疊加分析,通過(guò)軟件計(jì)算得到車輛限界的檢測(cè)結(jié)果。
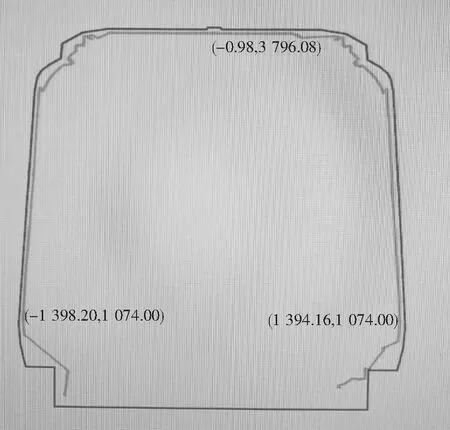
圖6 限界檢測(cè)圖像
4.2 限界檢測(cè)分析及報(bào)告生成
在車輛的限界檢測(cè)過(guò)程中,須推動(dòng)車輛通過(guò)限界檢測(cè)裝置,車輛的運(yùn)動(dòng)可能會(huì)造成車輛與軌道之間的不對(duì)中,從而造成車輛的檢測(cè)出現(xiàn)誤檢測(cè),但激光掃描檢測(cè)可根據(jù)車輛實(shí)際中心線距軌道中心軸線的常數(shù)定值,結(jié)合實(shí)測(cè)數(shù)據(jù)自動(dòng)計(jì)算車輛橫斷面的軌道基準(zhǔn)點(diǎn),同時(shí)車輛限界與隧道橫斷面根據(jù)所得軌道基準(zhǔn)點(diǎn)進(jìn)行疊加。以實(shí)際軌道位置為基準(zhǔn),以車輛動(dòng)態(tài)輪廓節(jié)點(diǎn)為檢測(cè)對(duì)象,測(cè)量與之最近的車輛限界點(diǎn)間距,相較于以往限界規(guī)只能粗略定性判斷車輛是否存在超限更加直觀準(zhǔn)確,基于激光原理的全面精確的限界檢測(cè)更符合限界分析需求。
限界測(cè)量分析完畢,軟件支持一鍵生成圖表檢測(cè)報(bào)告。書(shū)面報(bào)告內(nèi)容包括測(cè)量單位、測(cè)量狀態(tài)、軌距、測(cè)量數(shù)據(jù)、測(cè)量結(jié)果及其他測(cè)量信息,如圖7所示。
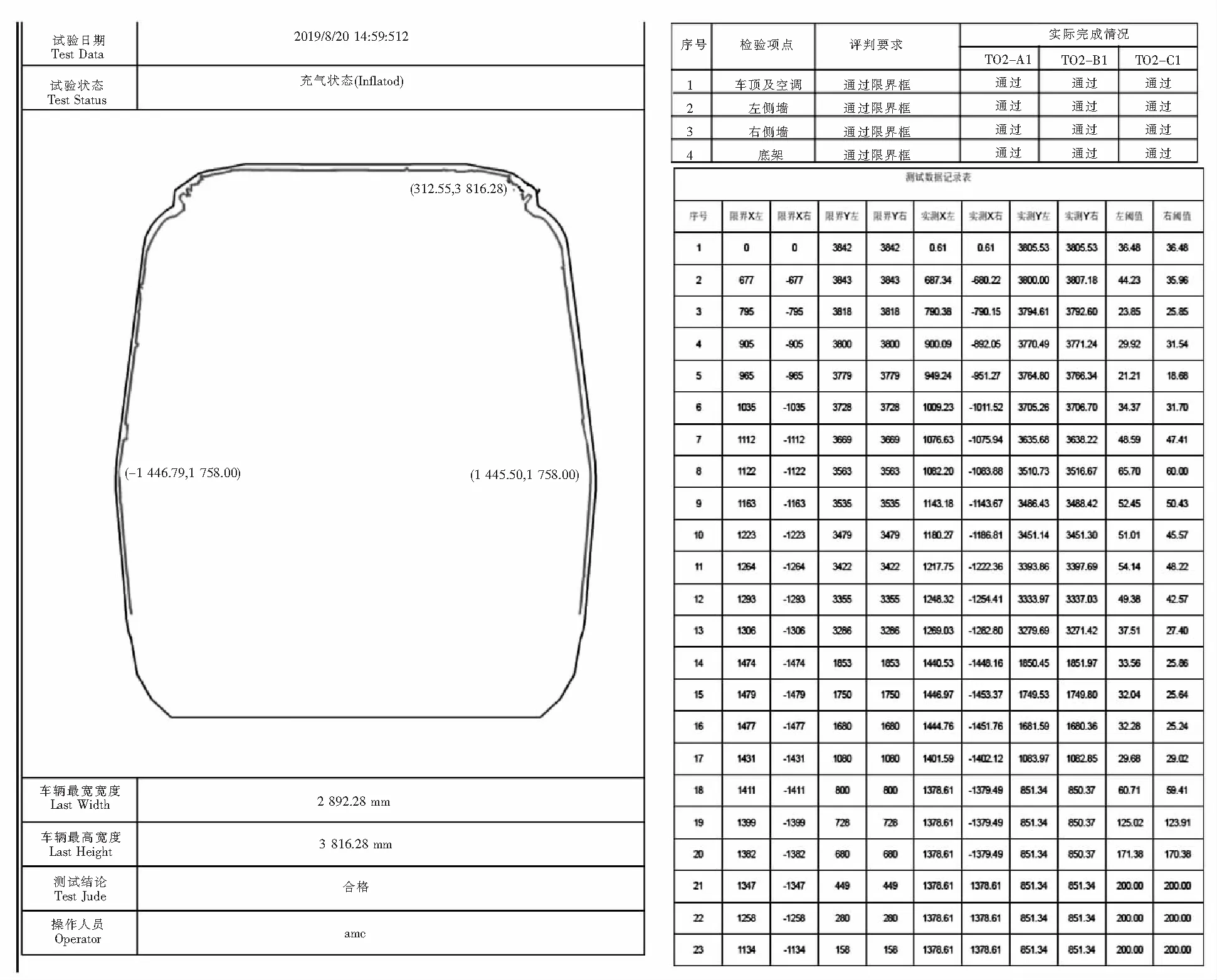
圖7 限界檢測(cè)報(bào)告
5 結(jié)語(yǔ)
本文提出的激光限界檢測(cè)技術(shù)已經(jīng)用于實(shí)際地鐵車輛限界檢測(cè)項(xiàng)目,為地鐵車輛的限界檢測(cè)以及超限分析提供了高效可靠的檢測(cè)和分析手段,區(qū)別于以往測(cè)量方案,本文提出的激光限界測(cè)量方案實(shí)現(xiàn)了檢測(cè)結(jié)果二維和三維展示,獲取的車輛限界信息也更加精確詳實(shí)。總結(jié)來(lái)說(shuō),該解決方案利用三維激光掃描儀,結(jié)合點(diǎn)云數(shù)據(jù)處理軟件及專業(yè)的車輛限界分析軟件,在提高可靠性和作業(yè)效率的同時(shí),更為直觀地展現(xiàn)限界測(cè)量情況,并可快速生成圖表一體的限界檢測(cè)報(bào)告,為地鐵車輛的限界檢測(cè)提供了解決方案。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21