一類廣義系統的輸出反饋滑模保性能控制
2020-08-13 08:57:00黃文凱
科學技術創新 2020年23期
黃文凱
(東北大學,遼寧 沈陽110819)
廣義系統在最近變成了一個研究的熱門領域,廣義系統是正常系統的推廣,并且在實際生活中具有更為廣泛的應用,例如圖像處理[1],多智能體[2],機器人[3]等。穩定性是所有系統的基礎,很多關于廣義系統穩定性的論文被發表在高水平期刊上面,文獻[4]研究了廣義系統的穩定性,給出了廣義系統穩定和鎮定的充分必要條件。文獻[5]研究了廣義系統的觀測器控制問題。文獻[6]則研究了不確定廣義系統在收到擾動時的控制。
隨著控制要求的提高,所設計的控制器不僅要求保證閉環系統的穩定性,還要求閉環系統對給定的性能指標確定出一個上界,因此出現了系統的保性能控制。保性能控制能應用于各種系統。文獻[7]研究了時滯系統的保性能控制。文獻[8]研究了放射非線性廣義系統的保性能控制問題。保性能控制也能很好的應用在滑模控制理論中來確保滑動模態具有良好的運動品質。然后,由于系統的狀態信息在實際應用中很難得到,所以很有必要研究系統的輸出反饋控制,這使我們對廣義系統的輸出反饋滑模保性能控制進行了研究。
1 準備知識
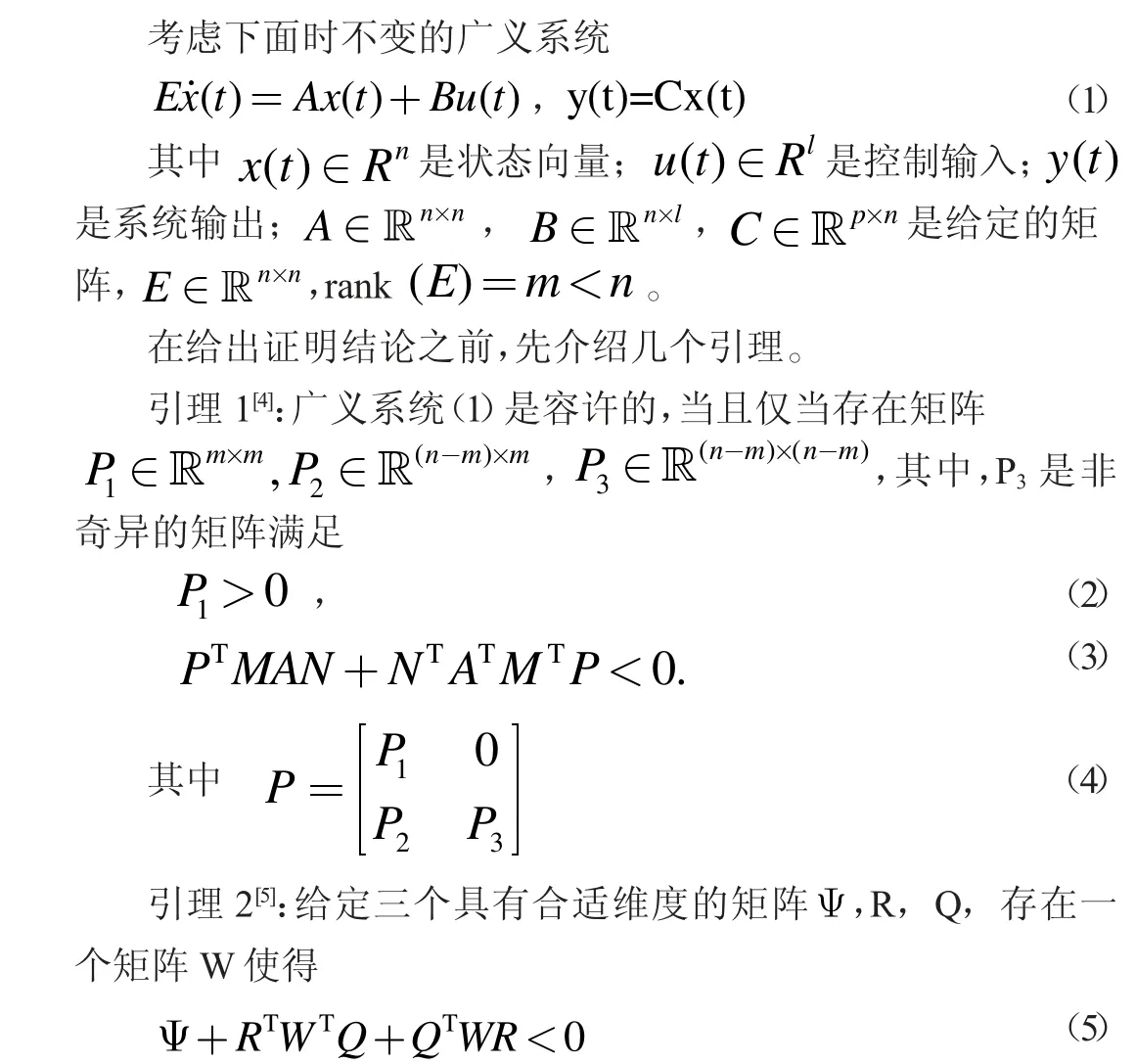

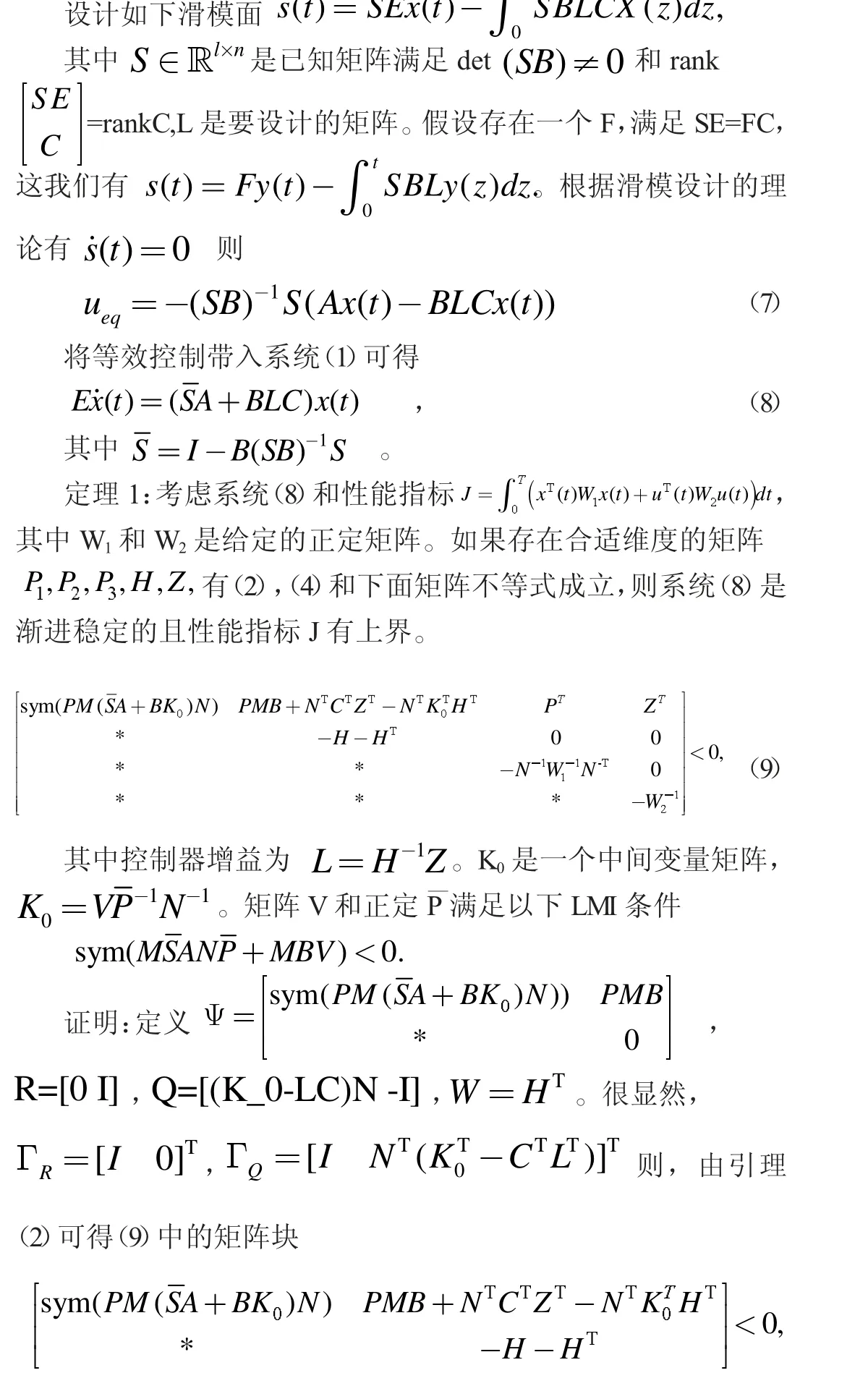
2 主要結果

3 仿真算例



圖1

圖2
4 結論
本文研究了一類廣義系統的輸出反饋滑模保性能控制問題,得到的結果能通過MATLVAB 工具箱進行求解。以后會在此基礎上研究分數階系統的滑模控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
