基于模擬退火算法的Stewart平臺的運動學正解分析
2020-08-13 07:17:51邵云龍吳建民孔森
軟件 2020年6期
邵云龍 吳建民 孔森
摘 ?要: 在工業生產之中Stewart平臺被廣泛應用。由于上平臺得位姿不易得到測量,又需要監控機構的運行位置。因此對Stewart平臺進行運動學正解分析是十分必要的。本文利用牛頓-泰勒法建立Stewart平臺的運動學正解模型,求解出位置逆解、速度逆解。并利用模擬退火算法與初值無關并且具有概率突跳性和Newton-Raphson迭代法精度高的特點,提出了模擬退火算法和Newton-Raphson迭代法相結合的Stewart平臺位置正解方法。通過MATLAB編制了運動學正解和運動學反解的程序。利用SolidWorks進行建模,并且在Adams上進行運動仿真驗真了算法的準確性, 為下一步的研究提供理論依據。
關鍵詞: Stewart平臺;模擬退火算法;Newton-Raphson;SolidWorks;Adams
中圖分類號: TP273 ? ?文獻標識碼: A ? ?DOI:10.3969/j.issn.1003-6970.2020.06.051
本文著錄格式:邵云龍,吳建民,孔森,等. 基于模擬退火算法的Stewart平臺的運動學正解分析[J]. 軟件,2020,41(06):247252+256
【Abstract】: The Stewart platform is widely used in industrial production due to its advantages such as high rigidity, stable structure, and other advantages. However, since the posture of the upper platform is difficult to measure during the operation, it is necessary to monitor the operating position of the mechanism to ensure the safe operation of the mechanism. Therefore, it is necessary to analyze the forward kinematics of the Stewart platform. In this paper, the Newton-Taylor method is used to establish a positive kinematics solution model of the Stewart platform, and the inverse position and velocity solutions are solved. The simulated annealing algorithm is independent of the initial value and has the characteristics of probability jump and high accuracy of the Newton-Raphson iteration method. A Stewart platform forward solution method combining the simulated annealing algorithm and the Newton-Raphson iteration method is proposed. Programs for positive and negative kinematics were compiled by MATLAB. Modeling with SolidWorks and motion simulation on Adams verified the accuracy of the algorithm, providing a theoretical basis for further research.
【Key words】: Stewart platform; Simulated annealing algorithm; Newton-Raphson; SolidWorks; Adams
0 ?引言
Stewart平臺是自動化領域最具標志性的并聯機械裝置,在工業上得到了廣泛應用,如艦載穩定平臺、海浪運動模擬器、人形機器人腰部結構等等。近年來,由于運動學正解問題在研究過程中處于基礎性地位,越來越多的國內外學者投身于對其的研究[1]。對于Stewart平臺,上平臺可以實現6個自由度的運動。為了使上平臺可以更加精確的完成預先設定的運動軌跡,其運動學正解研究變得愈發重要起來。Manuel Cardona將牛頓-拉夫森數值迭代算法應用于Stewart平臺運動學位置正解的過程中,能夠快速得到運動學正解的其中一解[2]。張宗之,秦俊奇,陳海龍,劉平松等人采用BP神經算法,解決了數值解法當中出現的計算速度較慢,迭代初值選取不當將會導致運算結果出現較大偏差的不利情況[3]。楊恒,薛開將變搜索原點的牛頓迭代法應用于Stewart平臺運動學位置正解的過程中[4]。李晶針對當前Stewart平臺正解法存在的問題,提出了遺傳神經網絡正解算法[5]。胡啟國,駱艷麗,王宇謙等人提出一種應用于Stewart平臺運動學位置正解的過程中的基于多目標遺傳算法(NSGA-Ⅱ)和最小二乘理論結合的算法[6]。
為了保證平臺的安全運行并且實現對Stewart 平臺空間機構位置的實時監控。本文重點研究模擬退火算法和Newton-Raphson迭代法相結合的Stewart平臺位置正解方法。并依靠MATLAB編制運動學正解和運動學反解的求解程序。通過SolidWorks進行建模,在Adams上進行運動仿真,驗真了算法的準確性,為下一步的研究提供理論依據。
1 ?運動學分析
為了更為清晰地描述上平臺的運動姿態。將動坐標系固定在上平臺上,并且其原點將與上平臺的中心重合。將靜坐標系固定在空間之中。當整個平臺處于初始狀態時,靜坐標系將與動坐標系重合。
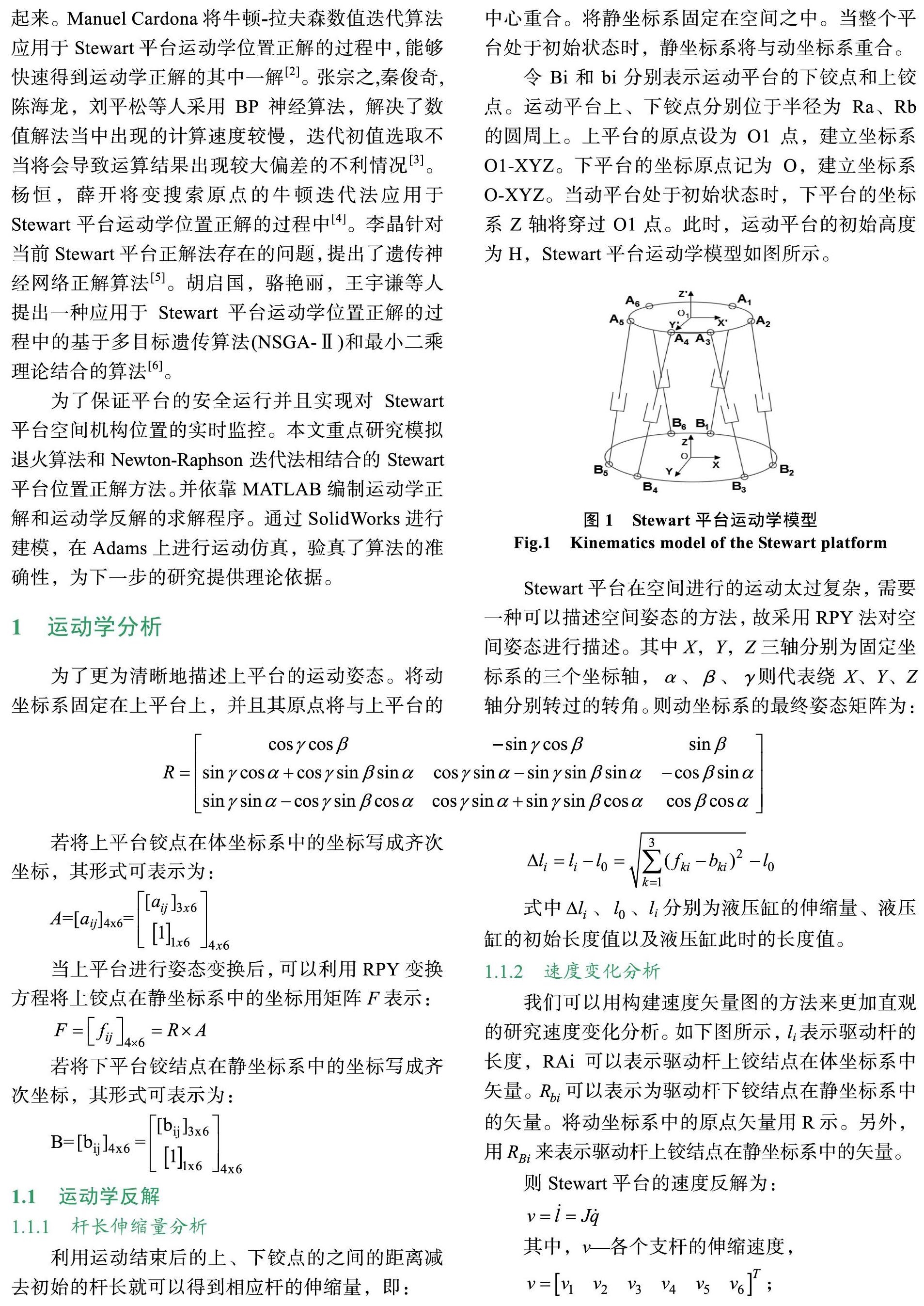
令Bi和bi分別表示運動平臺的下鉸點和上鉸點。運動平臺上、下鉸點分別位于半徑為Ra、Rb的圓周上。上平臺的原點設為O1點,建立坐標系O1-XYZ。下平臺的坐標原點記為O,建立坐標系O-XYZ。當動平臺處于初始狀態時,下平臺的坐標系Z軸將穿過O1點。此時,運動平臺的初始高度為H,Stewart平臺運動學模型如圖所示。
1.1 ?運動學反解
1.1.1 ?桿長伸縮量分析
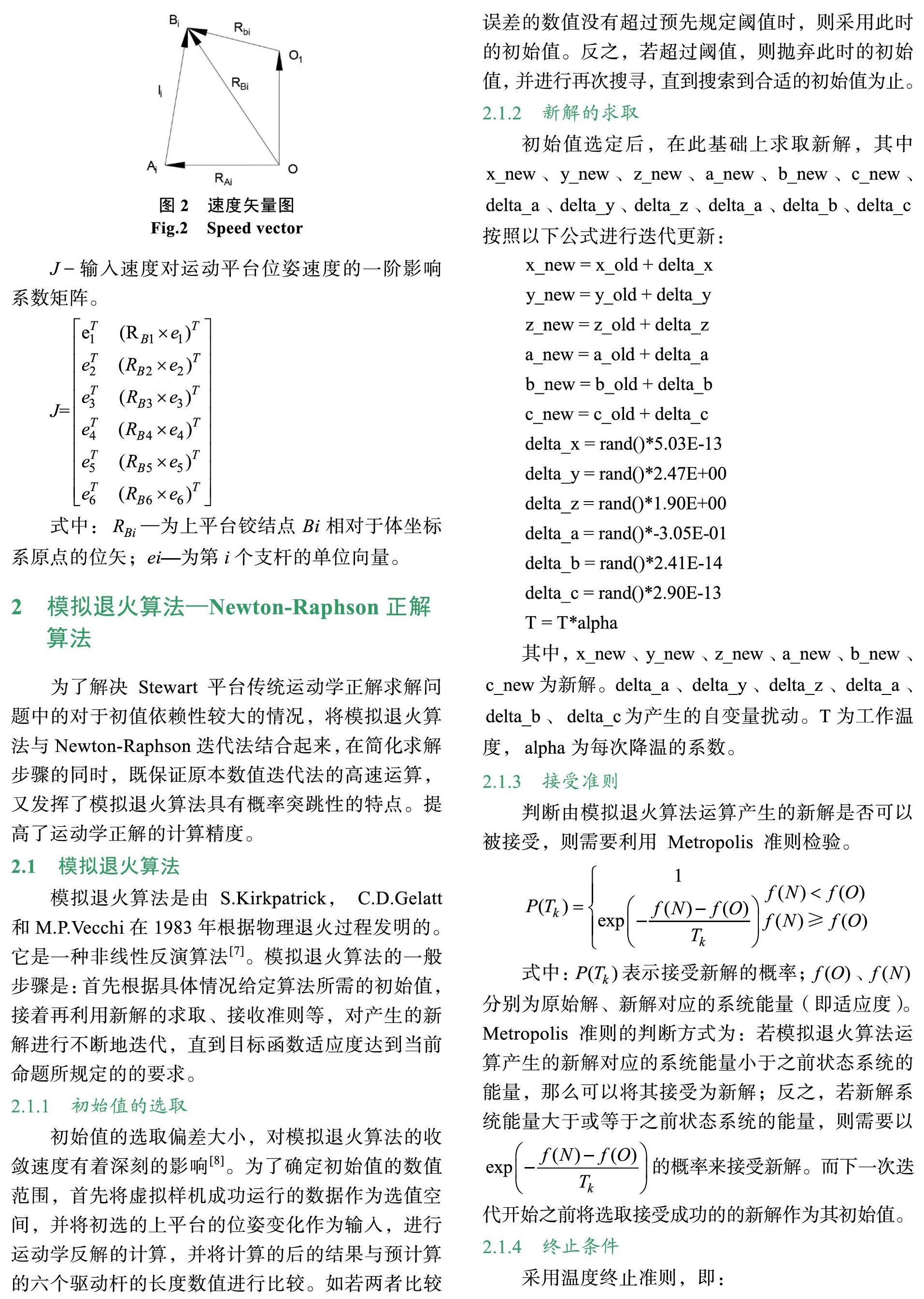
1.1.2 ?速度變化分析
我們可以用構建速度矢量圖的方法來更加直觀的研究速度變化分析。如下圖所示,li表示驅動桿的長度,RAi可以表示驅動桿上鉸結點在體坐標系中矢量。 可以表示為驅動桿下鉸結點在靜坐標系中的矢量。將動坐標系中的原點矢量用R示。另外,用 來表示驅動桿上鉸結點在靜坐標系中的矢量。
2 ?模擬退火算法—Newton-Raphson正解算法
為了解決Stewart平臺傳統運動學正解求解問題中的對于初值依賴性較大的情況,將模擬退火算法與Newton-Raphson迭代法結合起來,在簡化求解步驟的同時,既保證原本數值迭代法的高速運算,又發揮了模擬退火算法具有概率突跳性的特點。提高了運動學正解的計算精度。
2.1 ?模擬退火算法
模擬退火算法是由S.Kirkpatrick, C.D.Gelatt和M.P.Vecchi在1983年根據物理退火過程發明的。它是一種非線性反演算法[7]。模擬退火算法的一般步驟是:首先根據具體情況給定算法所需的初始值,接著再利用新解的求取、接收準則等,對產生的新解進行不斷地迭代,直到目標函數適應度達到當前命題所規定的的要求。
2.1.1 ?初始值的選取
初始值的選取偏差大小,對模擬退火算法的收斂速度有著深刻的影響[8]。為了確定初始值的數值范圍,首先將虛擬樣機成功運行的數據作為選值空間,并將初選的上平臺的位姿變化作為輸入,進行運動學反解的計算,并將計算的后的結果與預計算的六個驅動桿的長度數值進行比較。如若兩者比較誤差的數值沒有超過預先規定閾值時,則采用此時的初始值。反之,若超過閾值,則拋棄此時的初始值,并進行再次搜尋,直到搜索到合適的初始值為止。
2.1.2 ?新解的求取
綜上可知,模擬退火算法—Newton-Raphson正解算法的基本步驟為:
(1)最大溫度、每次降溫系數、最小溫度、初始化溫度等參數的設定;
(2)將在設定取值范圍內生成初始值帶入反解算法,并將結果與目標值比較,以決定是否接受此初始解,并在此基礎上計算初始值的適應度;
(3)代入上述步驟產生的初始值,進行模擬退火算法的計算操作,通過 Metropolis 準則來判斷是否接受新解;
(4)當模擬退火算法迭代一定的代數或者滿足當前情況的具體設定后,將新解作為初始值,并將其代入到Newton-Raphson迭代法中進行數值運算;
(5)當迭代次數或者適應度數值達到預先設定的閾值時,則將此時的新解結果輸出;若不滿足上述收斂條件,則跳轉至步驟(2),并重新進行迭代運算。
3 ?基于Adams的Stewart平臺運動學仿真
Stewart運動平臺三維模型是建立ADAMS運動仿真的基礎。但由于ADAMS自帶的建模工具三維造型能力略顯不足。采用SolidWorks建模、ADAMS仿真的方法,充分發揮兩款軟件的優點和長處,節省了工作時間,提升了實驗的效率[9]。
為了對ADAMS仿真分析做前期準備,以Parasolid格式將由SolidWorks得到的裝配體導出,將其導入成功后,對虛擬樣機中的各個零部件進行重新命名、賦予材質及其他特性。為了便于在仿真時便于識別,提高工作效率,可以修改零件的顏色、透明度等。此外,為了保證各構件能夠按照實際的運動狀態進行運動,必須要在各個零件之間添加合理的約束關系。其中,下平臺與大地通過固定副連接在一起。上、下平臺與上、下平臺虎克鉸支座通過固定副相連。上、下虎克鉸通過十字架與活塞桿和缸體進行萬向節副的連接,活塞桿和缸體間可以以圓柱副相連,另外,活塞桿與缸體間需要添加移動副。
Stewart平臺的虛擬樣機的結構參數為:上平臺直徑為300 mm,下平臺直徑為400 mm。當平臺處于初始位置時,下平臺到上平臺的距離h為450 mm,各個桿長li均為470 mm。Stewart平臺的虛擬樣機如圖所示。
上平臺相鄰較近的兩個鉸結點之間的距離為77.4 mm,相鄰較遠的兩個鉸結點之間的距離為424.26 mm。上平臺的各個鉸結點之間的位置關系圖如圖所示。
下平臺相鄰較近的兩個鉸結點之間的距離為103.2 mm,相鄰較遠的兩個鉸結點之間的距離為565.68 mm。下平臺的各個鉸結點之間的位置關系圖如圖所示。
結果可以表明:姿態角度信息求解結果穩定,坐標位置信息有一定的誤差,但每次計算結果的誤差均穩定在一定范圍內并且相差較小。對于平臺的運動學正解來說,是可以接受的,說明該方法能夠用于平臺位姿的運算。
5 ?結論
仿真結果驗證了正解算法的合理性和有效性,對 Stewart 平臺的運動學正解分析提供了新的解決思路。對實際工作中的運動平臺的控制和監測,具有一定的實際意義。
參考文獻
[1] 朱俊豪, 尤晶晶, 葉鵬達. 七支鏈Stewart并聯機構位置正解的半解析算法[J]. 機械設計與制造工程, 2019, 48(07): 30-34.
[2] CARDONA M. A new approach for the forward kinematics of general stewart-gough platform[C]//Central American andPanama Convention. New York: IEEE, 2016: 1-6.
[3] 張宗之, 秦俊奇, 陳海龍, 劉平松. 基于BP神經網絡的Stewart平臺位姿正解算法研究[J]. 機械傳動, 2015, 39(06): 54-57.
[4] 楊恒, 薛開. 六自由度并聯機構變搜索原點迭代正解方法[J]. 應用科技, 2016, 43(02): 54-58.
[5] 李晶. 六自由度Stewart平臺運動學遺傳神經網絡正解[J]. 艦船科學技術, 2017, 39(04): 112-114.
[6] 胡啟國, 駱艷麗, 王宇謙. 基于多目標遺傳算法的Stewart平臺運動學正解解算[J]. 機械傳動, 2019, 43(03): 48-53.
[7] 邵文超. 基于模擬退火算法的船舶航向PID控制器參數優化研究[J]. 科學技術創新, 2019(22): 19-21.
[8] 馮進, 倪小威, 楊清, 管耀, 劉迪仁. 基于混合模擬退火算法的陣列側向測井實時反演研究[J]. 石油鉆探技術, 2019, 47(05): 121-126.
[9] 林礪宗, 潘大亨, 傅招國, 倪小鵬. 基于ADAMS的六自由度液壓動感平臺建模及運動學仿真[J]. 機床與液壓, 2012, 40(13): 166-169+174.
[10] 林智宏, 曾震宇, 朱鈺, 宮瑞. 船舶運動仿真平臺的設計[J]. 自動化技術與應用, 2016, 35(12): 104-107.
