“速度低”告警速度的分析方法研究
2020-08-17 10:47:14蔣盼盼楊昌發(fā)江維毛玥
教練機 2020年2期
蔣盼盼,楊昌發(fā),江維,毛玥
(航空工業(yè)洪都,江西 南昌,330024)
0 引 言
現(xiàn)代飛機特別是現(xiàn)代高機動性飛機其代表性的特點是有大量的各種各樣的飛行限制和使用限制[1],常見的如迎角/過載限制和滾轉限制等,這些限制用于保障飛行安全,使飛機不容易出現(xiàn)失控狀態(tài)。但是當飛機在進行高俯仰姿態(tài)和低速度的倒飛飛行時,容易出現(xiàn)倒飛俯仰偏離,如經(jīng)常遇到的以很慢的速度過頂點的飛行。此外,當飛行速度低于某個門限值且伴有突然的桿指令輸入時,正飛或倒飛俯仰偏離也可能發(fā)生,此時無論俯仰姿態(tài)如何。偏離意味著飛機失控、飛機處于危險飛行狀態(tài),為了避免低速度下的危險情況發(fā)生,提高飛行安全性,希望飛機飛行狀態(tài)接近安全邊界時,有速度告警點,對飛行員發(fā)出明顯的信號提示,提醒飛行員立即采取改出措施[2]。為了確定速度告警點,本文對 “速度低” 告警速度的分析方法進行了研究。
1 “速度低” 告警應用情況
在F-16C 飛機上有一個 “速度低” 的語音告警,當存在以下條件之一時,將在頭戴式耳機里聽見穩(wěn)定的 “速度低” 告警音:
1)當起落架手柄在放下位或高度襟翼開關在EXTEND(延展)位置,攻角大于或等于15°。
2)起落架手柄在收上位且高度襟翼開關在NORM(正常)位置,空速和俯仰角組合落在告警音區(qū)域某一點上。
3)TFR(地形跟蹤雷達)工作且空速降到300 節(jié)以下(校準空速或地速)。
對于第二個觸發(fā)條件中提到的告警音區(qū)域如圖1所示,當空速和俯仰角組合落在區(qū)域中某一點上時,反映了飛機已處于一種邊界條件,如果繼續(xù)保持狀態(tài)不執(zhí)行改出操作,飛機將有可能出現(xiàn)偏離,所以在飛行過程中一旦觸發(fā) “速度低” 告警,應立即采取改出措施。
2 分析方法概述
參考圖1 的 “速度低” 告警形式,即以俯仰角為變量給定 “速度低” 告警值,結合飛行力學理論,給出以下兩種分析方法。
2.1 分析方法一
基本思路:假設飛機在鉛垂面內,以給定的飛機重量、給定的發(fā)動機狀態(tài),保持某個給定的俯仰角爬升,當減速到某個速度值Vwarn 時,飛機開始出現(xiàn) “速度低” 告警語音,此后飛行員在一定的時間內對該告警做出反應并操縱改出,若飛行員未進行反應和改出操縱,則飛機繼續(xù)爬升減速,直到飛機達到限制攻角或限制速度,進入不安全狀態(tài)。
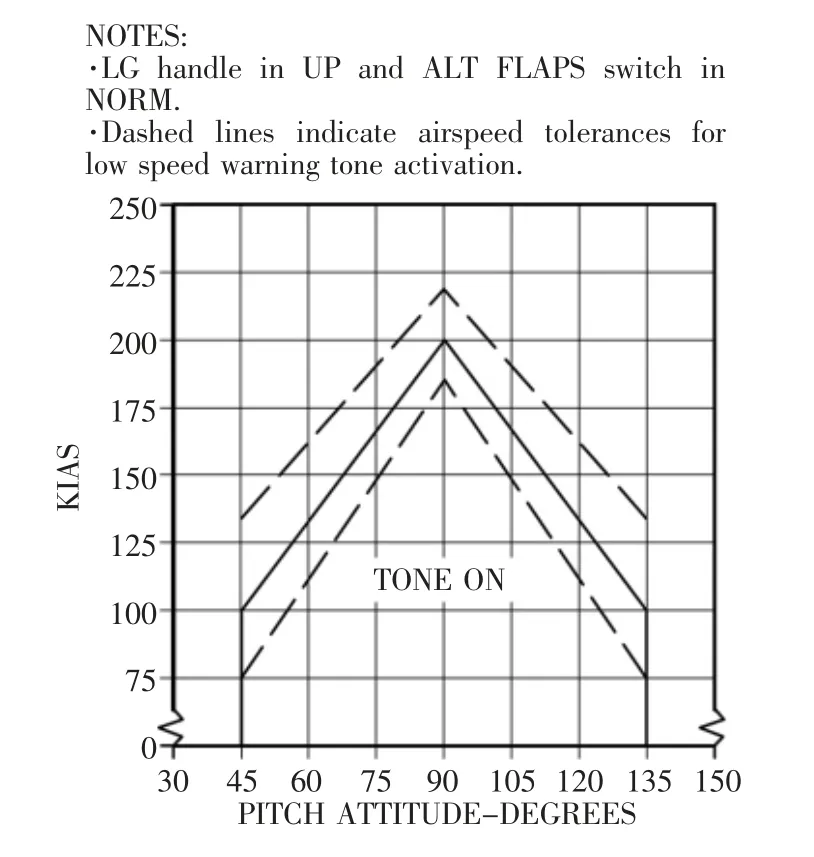
圖1 “速度低” 告警
該分析方法使用的數(shù)學模型[3,4]如下:
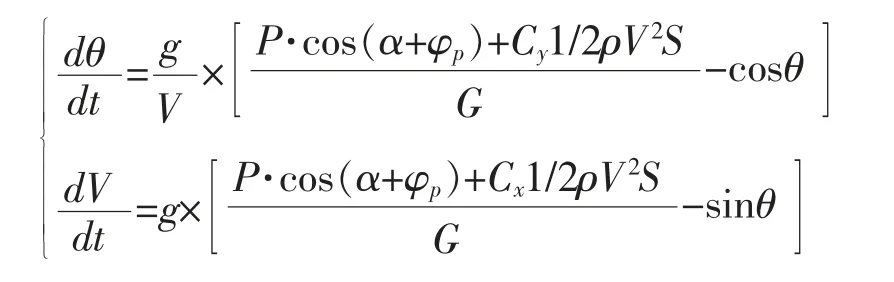
式中:α、?、φp—分別為迎角、航跡傾斜角、發(fā)動機安裝角,Cy、Cx—升力系數(shù)、阻力系數(shù),G—飛機重量。
2.2 分析方法二
考慮到實際飛行中飛機可能帶有坡度,此時為了平衡重力分量,需要使用更大的迎角,相應的阻力增加,在其他條件都相同的情況下,此時減速度會更大,用方法一獲得的速度告警值可能會偏小,因此考慮用保守的方法二進行分析。
方法二的基本思路與方法一的區(qū)別如下:在整個飛行過程中使用限制迎角對應的氣動力數(shù)據(jù)。
該分析方法使用的數(shù)學模型如下:

式中:α、θ、φp—分別為迎角、航跡傾斜角、發(fā)動機安裝角,Cy、Cx—升力系數(shù)、阻力系數(shù),G—飛機重量。
3 計算結果分析
通過matlab 軟件建立兩種分析方法的仿真模型,并以某型飛機為例進行仿真分析,其中方法一仿真條件設置為: 高度:5000m; 俯仰角:30°,40°,50°,60°,70°,80°,90°; 發(fā) 動 機 狀 態(tài) (×最 大 狀 態(tài)):1,0.8,0.6,0.4,0.2;飛機重量:使用輕載構型和重載構型的典型重量;結束條件:達到相應構型的限制迎角或限制速度。計算歷程時間是根據(jù)模擬飛行時飛行員對告警做出反應并操縱改出所需要的時間確定的。具體計算結果見圖2 和圖3。
方法二仿真條件與方法一的基本相同,區(qū)別在于仿真結束條件為達到輕載構型或重載構型的限制速度。具體計算結果見圖4 和圖5。
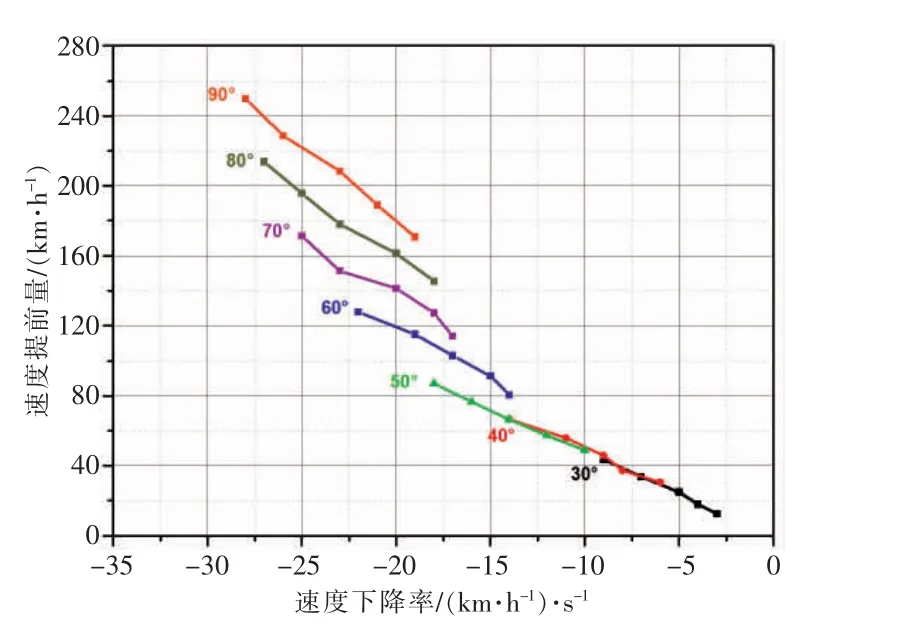
圖2 輕載構型 “速度低告警” 速度值
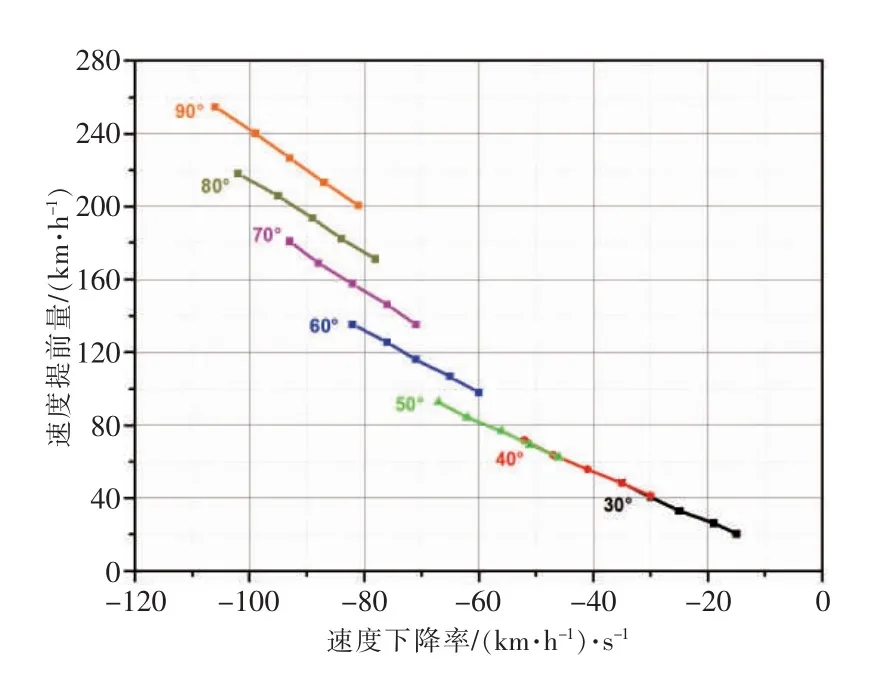
圖3 重載構型 “速度低告警” 速度值
圖4 輕載構型 “速度低告警” 速度值
圖2~圖5 為速度提前量(以告警速度值與限制速度差量的形式給出)隨速度下降率變化曲線。由圖可知,在計算高度上,方法一計算的速度提前量集中在260km/h 之內,方法二計算的速度提前量,除輕載構型90°俯仰角的速度提前量外,集中在400km/h 之內。相對方法一,方法二的計算結果更保守;圖中顯示,速度下降率增加,速度提前量也隨之增加,該結果符合飛行一般規(guī)律,合理可信。
圖5 重載構型 “速度低告警” 速度值
4 與實際飛行數(shù)據(jù)對比
本文針對速度下降率參數(shù),在相同條件下,將兩種分析方法的理論計算值與實際飛行值進行了對比,詳見表1 和圖6。
表1 速度下降率
圖6 與實際飛行數(shù)據(jù)比較結果
從表1 及圖6 可以看出,方法一的計算結果與實際飛行結果非常接近,只在大俯仰角情況下(>80°)差距會大一些,當俯仰角為90°時,方法一計算的速度下降率比相同條件下的實際飛行速度下降率小21%左右,此時計算得到的低速度告警值會偏小,安全性會差一些。方法二的計算結果在俯仰角不超過60°的情況下與實際情況接近,但由于仿真全程使用的是限制迎角對應的氣動力數(shù)據(jù),俯仰角超過60°之后結果就顯得比較保守,當俯仰角為90°時,方法二計算的速度下降率比相同條件下的實際飛行速度下降率大91%左右,雖然安全性很好,但是限制了飛機在大俯仰角情況下的飛行能力。
5 結 語
本文通過研究 “速度低” 告警的實際應用情況,運用飛行力學理論,提出了兩種 “速度低” 告警速度的分析方法,闡述了其基本原理和計算方法,給出了數(shù)學模型,并基于某型機的氣動、動力等平臺,使用matlab軟件實現(xiàn)了兩種方法的仿真分析,從仿真曲線以及與實際飛行數(shù)據(jù)的對比情況可以看出,方法一的計算數(shù)據(jù)與實際飛行數(shù)據(jù)接近,僅在大俯仰角情況下(>80°)存在一些差距,此時獲得的速度告警值偏小。方法二的計算結果在俯仰角不超過60°的情況下與實際情況接近,但俯仰角超過60°之后就顯得比較保守。兩種 “速度低” 告警速度的分析方法,可以滿足飛機 “速度低” 告警系統(tǒng)開發(fā)的部分需求,可作為開展此方面深入研究的基礎。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
兒童故事畫報(2019年5期)2019-05-26 14:26:14
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
