煤礦井下防爆無軌膠輪車安全系統的設計研究
2020-08-21 05:22:34楊驍
機械管理開發 2020年7期
楊 驍
(晉能集團大同有限公司, 山西 大同 037000)
引言
運輸系統是煤礦井下必不可少的構成部分,可以劃分成為有軌運輸和無軌運輸兩種,有軌運輸在實踐應用過程中受到很多限制,在很多場合無法滿足實際使用需要[1]。無軌運輸以其顯著的優勢越來越受到煤礦行業的關注,在現代化大型煤礦中,防爆無軌膠輪車是非常重要的輔助運輸設備[2]。但由于煤礦井下工作環境比較特殊,對防爆無軌膠輪車運行的安全性提出了更加嚴格的要求[3-4]。由于我國對防爆無軌膠輪車在煤礦井下的應用研究相對較晚。導致防爆無軌膠輪車在安全方面存在一定隱患,嚴重威脅著煤礦井下的安全生產。因此為提升防爆無軌膠輪車運行安全性,設計研究了一套安全系統,可有效保障車輛的運行安全,避免出現各種安全事故[5-6]。
1 防爆無軌膠輪車安全系統總體設計
為保障防爆無軌膠輪車安全,需對其運行狀態數據信息進行實時檢測。要檢測的數據類型較多,不同數據類型格式存在差異。因此,需將不同格式的數據信息進行轉換,實施標準化處理,再輸入到控制系統中進行對比分析,進而實現防爆無軌膠輪車的安全控制。如圖1 所示為防爆無軌膠輪車安全系統總體框架圖。
1.1 數據采集及轉換
數據采集是系統判斷防爆無軌膠輪車運行狀態的根本和前提。數據采集模塊的作用就是對防爆無軌膠輪車的運行狀態、井內瓦斯濃度等信息進行采集,需要采集數據信息具體見圖1。可以看出,需采集的數據信息種類非常多,對每種數據信號都需要采用對應的專業傳感器進行檢測收集。因此,最終得到的數據信息格式也存在差異。傳感器可以分成為模擬信號、數字信號傳感器兩類。由于控制器只能識別數字量信號。所以,模擬信號傳感器采集得到的數據信息需要通過A/D 轉換器將其轉換成數字信號才能夠輸入到控制器中進行分析和處理。數字信號傳感器采集得到的就是數字信號,能夠直接輸入到控制器中進行處理,不需要對其進行格式轉換。
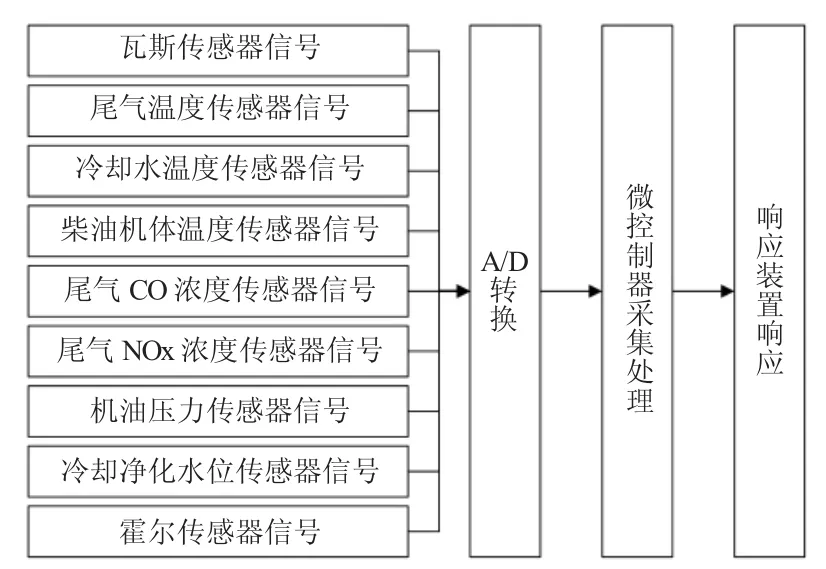
圖1 防爆無軌膠輪車安全系統總體框架圖
1.2 控制功能
控制器的功能就是對各個專業傳感器采集得到的信號數據進行分析處理。對每個需要檢測的數據信號,可根據煤礦井下具體情況,提前在控制器內設置一個安全閾值。控制器將傳感器檢測收集的信號數據與系統設置的安全閾值進行比較分析。檢測信號如果在安全閾值范圍內認為是安全的,如果檢測信號超過了安全閾值就認為存在危險。控制器根據處理分析結果輸出對應的控制量,以達到控制的目的。控制器通過防爆無軌膠輪車蓄電池直接進行供電。
1.3 結果響應
響應控制模塊由控制裝置、聲光報警系統以及顯示器構成。傳感器采集得到的數據信息經過控制器處理后,可以被實時顯示在顯示器上,以供工作人員觀察,進而判斷防爆無軌膠輪車的運行狀態。當控制系統分析發現實際檢測數據信息超過了安全閾值時,會輸出一個控制信號,此時,聲光報警系統發出聲音和燈光進行報警,以提醒工作人員。此外,還會對車輛進行自動控制,比如將車輛進行熄火處理等。
2 防爆無軌膠輪車安全系統的硬件設計
如圖2 所示為防爆無軌膠輪車安全系統硬件組成。由圖可知,安全系統由多個硬件模塊構成。本文設計的控制系統采用嵌入式思路,由于煤礦井下環境復雜,為確保數據檢測、傳輸和處理過程的準確性,系統中設計了抗干擾電路。以下對防爆無軌膠輪車安全系統中涉及到的主要硬件部分進行詳細介紹。
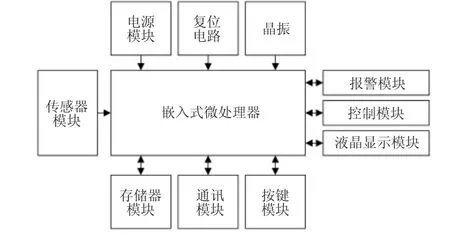
圖2 防爆無軌膠輪車安全系統硬件組成
2.1 控制器型號的選擇
本文設計的安全控制系統屬于嵌入式系統。因此,需要采用嵌入式芯片作為控制器。可供選擇的控制器類型主要包括PLC、ARM 和DSP。在綜合考慮各種類型控制器性能以及本系統實際需要的基礎上,最終選擇ARM嵌入式微處理器作為安全系統的控制器。具體型號為S3C2440A,這種類型的控制器非常適用于車載系統,在該領域有非常廣泛的應用前景。ARM嵌入式微處理器由三星公司設計生產制作,采用的是ARM920T 核心,性能優越。
2.2 電源模塊的設計
系統由防爆無軌膠輪車蓄電池進行供電,蓄電池輸出電壓為12 V 直流電壓。安全系統中需要用到三個等級的電壓進行供電,分別為5 V、3.3 V、1.25 V。因此,需要設計專門的電路對蓄電池的電壓進行降低處理。其中需要用到調壓器,選用的型號為LM1117,調壓器對電流大小進行了限制并且提供有熱保護功能。經過調壓器處理后的輸出電壓誤差可以控制在1%范圍內,利用鉭電容改善輸出端電壓的穩定性。根據使用需要不同,LM1117 型調壓器還可進一步劃分成為多種類型。結合實際使用需要,最終選 用 的 類 型 包 括 LM1117-5.0、LM1117-3.3、LM1117-ADJ 型,分別可以實現12 V→5.0 V、5.0 V→3.3 V、3.3 V→1.25 V 的電壓轉變。
2.3 報警器硬件模塊的設計
本系統中設計的報警器系統由兩大部分構成,分別為聲音系統和燈光系統,通過聲音和燈光同時提示工作人員存在危險。對應的,報警系統的電路同樣由兩部分構成,分別為蜂鳴器電路和LED 燈電路。控制器對傳感器檢測收集的數據信號進行分析后,如果認為存在危險就會發出控制信號,驅動報警器發出聲響和燈光。蜂鳴器可以分成為有源和無源兩種類型,兩種類型適用于不同場合。其中有源蜂鳴器的電路結構比較簡單,因此本系統中選用這種類型的蜂鳴器。如圖3 所示為聲光報警系統的電路圖。
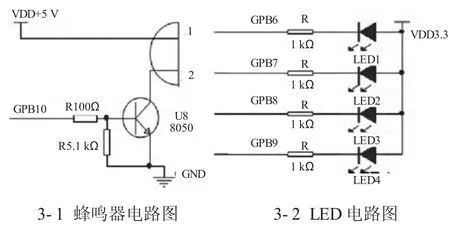
圖3 聲光報警系統的電路圖
3 防爆無軌膠輪車安全系統的軟件設計
3.1 安全系統主程序的設計
安全系統軟件開發在ADS1.2 編譯軟件中進行。軟件采用模塊化設計,系統程序主要包含三大部分,分別為啟動程序、數據分析程序、響應控制程序。為了達到模塊化的效果,對每個程序單獨進行編譯,方便日后的維護。
安全系統正式運行時首先執行啟動程序,主要對整個系統進行自檢,自檢過程中如果發現安全系統存在問題則系統無法正常啟動。啟動程序中還要實現各個模塊的初始化。啟動程序執行完成后開始執行數據分析程序。數據分析程序又主要由三大部分構成,分別為DS18B20 程序、A/D 程序和ADCO809 程序。其中,DS18B20 程序的作用是接受來自傳感器的信號數據,A/D 程序則是對數據信號進行轉換。數據分析程序的作用是將傳感器檢測得到的實際數據信息與系統中設置的安全閾值進行比較分析。如果實際運行狀態數據超過了安全閾值,安全系統會輸出控制量,調用報警系統子程序。一方面對防爆無軌膠輪車進行控制,避免車輛發生危險;另一方面通過報警系統發出報警聲響和燈光信號。而如果檢測信號在正常范圍內時,則將結果顯示在顯示器中,響應控制軟件程序由三部分構成,分別為液晶顯示、聲光報警和控制程序。通過液晶顯示程序可以將防爆無軌膠輪車運行狀態數據信息顯示在液晶顯示器中,通過聲光報警程序可以驅動聲光報警系統發生警告聲音和燈光,通過控制程序可以對防爆無軌膠輪車的發動機進行控制。如下頁圖4 所示為防爆無軌膠輪車安全系統軟件程序流程圖。

圖4 防爆無軌膠輪車安全系統軟件程序流程圖
3.2 數據顯示程序的設計
本安全系統中,選用的是LRO43JC211 型顯示器顯示防爆無軌膠輪車運行狀態數據信息。顯示器中的圖像由多個像素構成,每個像素可通過多個二進制數來進行表達。本系統選用的顯示器每個像素通過16個二進制數進行表達。顯示器的分辨率為480×272,即總共有272 行像素,每行像素包含480 個像素點,利用像素點可以組成不同的漢字進行顯示。
4 結語
1)安全保護系統利用專業傳感器可對防爆無軌膠輪車運行狀態信息、瓦斯濃度等進行實時采集并分析。具有良好的兼容性,可以對采集得到的不同格式數據信息進行標準化處理;
2)系統可以對采集到的數據進行綜合研判,分析防爆無軌膠輪車的安全狀態。如果發現存在安全隱患,系統會發出聲音和燈光警告信息,工作人員通過警示信息可以快速定位故障問題并排除;
3)選用S3C2440A 型ARM 嵌入式微處理器,該型號控制器性能優越且比較穩定,非常適用車載系統。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中華手工(2017年2期)2017-06-06 23:00:31
環球時報(2017-03-30)2017-03-30 06:44:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國衛生(2015年3期)2015-11-19 02:53:32
中外會展(2014年4期)2014-11-27 07:46:46
