皮帶自移機尾自動調平策略研究
2020-08-25 02:06:58閆建偉
機械工程與自動化 2020年4期
關鍵詞:策略
劉 震,李 洋,閆建偉
(寧夏天地奔牛實業集團有限公司,寧夏 石嘴山 753001)
0 引言
皮帶自移機尾是綜采工作面的重要輸送設備,在煤炭開采過程中承擔著順槽轉載機與皮帶輸送機的銜接,其可靠性及其操作的便利性直接影響井下運輸的暢通性和高效性。由于井下巷道地面的不平整性等原因,使得皮帶自移機尾在向前推進過程中機身發生傾斜,進而導致調平油缸損壞、皮帶輸送機的輸送帶發生跑偏等問題,影響轉載機和皮帶輸送機的正常運行。因此皮帶自移機尾在實際工作過程中常常需要人為調整各調平油缸的高度,使皮帶自移機尾機身調平。目前井下對皮帶自移機尾的調平通常是手動操作,整個調整過程中需要操作工人人為判斷設備當前狀態,然后根據經驗控制各個調平油缸的伸縮進行調節,不但存在對皮帶自移機尾是否需要調平的誤判,而且調節操作過程存在耗時較長、調整不準確的問題。這種調平方法精度較低、耗時較長、工作人員的工作量較大,影響整個綜采面的工作效率,也不利于井下設備自動化、智能化的發展[1]。隨著井下煤炭開采對設備的自動化、智能化、高精度、高產高效要求的逐漸增高,手動調平方法已經不能滿足井下相關設備的發展要求,因此實現皮帶自移機尾自動調平是對自移機尾的一次提升。本文分析了皮帶自移機尾的自動調平原理,提出了基于本安型控制器、傾角傳感器、位移傳感器和電磁先導閥的自動調平策略。
1 皮帶自移機尾自動調平控制原理
皮帶自移機尾主要由抬高架、機頭架、機尾架、中間架、導軌、小車及調平油缸、側移油缸、推移油缸和滑靴等組成,同時配備有液壓控制系統,其結構示意圖如圖1所示。
皮帶自移機尾自動調平控制是由控制器通過傳感器反饋的機身參數判斷目前機身所處狀態,然后對數據進行邏輯計算,通過對電磁閥發出控制指令控制機頭尾的4個調平油缸的伸縮來調節機頭架、機尾架、中間架三部分的姿態使之達到調平效果。自動調平控制系統結構框圖如圖2所示。

1-抬高架;2-機頭架;3-調平油缸;4-推移油缸;5-小車;6-導軌;7-中間架;8-機尾架;9-側移油缸;10-滑靴
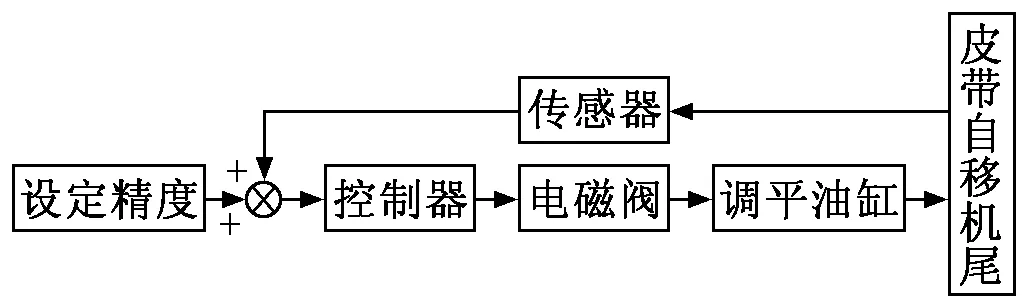
圖2 自動調平控制系統結構框圖
2 自動調平策略
目前大型平臺的調平策略主要有位置誤差控制調平策略和角度誤差控制調平策略兩種。位置誤差調平策略是通過控制調平油缸的伸縮使調平油缸的高度一致的方法實現調平。位置誤差控制調平策略可根據所選基準的不同分為最高點不動調平策略、最低點不動調平策略和中間點不動調平策略。角度誤差調平策略是通過不斷調整調平油缸伸縮長度來控制機身傾角的變化實現調平。結合皮帶自移機尾的機身結構和控制系統特點,單獨采用位置誤差控制調平策略或者角度誤差控制調平策略都不能達到很好的調平效果,需要將兩種策略相結合重新組合成一種策略。由于皮帶自移機尾機頭、機尾和中間架的連接屬于非剛性連接,調平油缸在機頭、機尾各兩個。因此為獲得更準確的機身傾斜角度數據和調平油缸的位移數據,需在4個調平油缸內安裝磁致伸縮位移傳感器,中間架上安裝一個雙軸傾角傳感器。
自移機尾是在順槽轉載機與皮帶輸送機處于運行狀態下完成推移動作,為不影響順槽轉載機與皮帶輸送機的正常運行,要求皮帶自移機尾整個調平過程應盡量平穩、迅速地完成。因此控制器在對皮帶自移機尾機身調平過程中,應在最短的時間內使機頭架和機尾架在X方向(左右方向)調平,防止由于機身傾斜導致輸送帶發生跑偏,然后進一步調整機頭架和機尾架使Y方向(前后方向)調平。所以應將位置誤差調平策略中的最高點不動策略與角度誤差調平策略相結合的策略作為皮帶自移機尾的調平策略,具體自動調平流程如圖3所示。
3 結束語
針對皮帶自移機尾獨特的結構特點和工況條件,闡述了一種符合其自動調平的調平策略。該策略在理論上可有效地縮短自動調平的時間,使整個調平過程更加平穩、更加精確。增加傳感器可對皮帶自移機尾機身姿態進行實時監控,為設備的智能化奠定基礎。
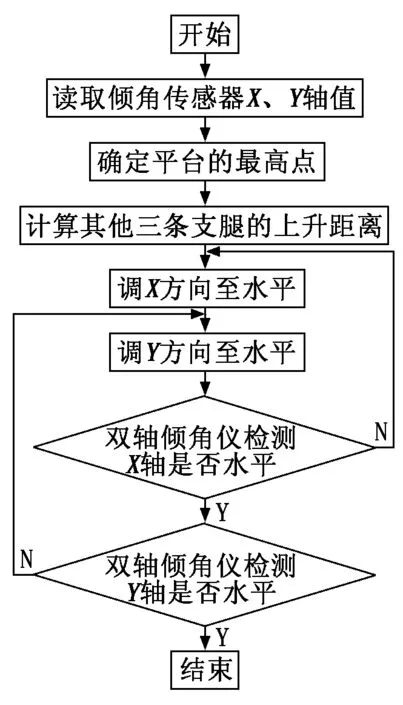
圖3 皮帶自移機尾自動調平流程
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50
