基于無人機傾斜攝影+3 D GIS的鄉村公路規劃方法探討
2020-08-26 07:39:32張祥燊孫國強
經緯天地 2020年3期
嚴 哲 張祥燊 孫國強
(海南集思勘測規劃設計有限公司,海南 海口570203)
0.引言
無人機技術的快速發展為三維空間信息的高效獲取提供了新的途徑,當前,無人機技術已被廣泛應用于軍事、農業、測繪、救災、環境以及影視拍攝等多種領域,創造了較好的應用價值[1]。
交通基礎設施對于社會經濟的發展至關重要,城鄉空間和交通設施之間存在復雜的相互影響關系,在實際規劃設計時常常因為空間信息技術獲取不全導致城鄉公路規劃難以適應當地的發展需求,特別是鄉村公路,由于其具有點多、面廣、數量巨大以及極度分散等特點,且各地區的自然條件各異,導致農村公路的規劃設計更是缺乏科學合理性,這極大阻礙了鄉村地區的經濟發展。無人機傾斜攝影技術是一種快速實現三維模型構建的新型技術,能夠多角度拍攝真實度高、可靠性強的空間影像,目前已成為空間地理信息獲取的主流技術[2-7]。
然而,三維空間信息技術在鄉村公路規劃的應用還處于初步探索階段,很多體系和技術應用尚不健全,如何建立一套行之有效的技術應用體系,加強鄉村公路規劃的科學性、合理性和可持續性,對于實現鄉村公路合理規劃布局具有重要意義[8-12]。本文以無人機傾斜攝影技術為基礎,建立起基于無人機傾斜攝影的實景三維空間信息技術體系,并進行案例分析,可為類似鄉村地區公路設計規劃布局提供借鑒。
1.鄉村公路規劃理論
鄉村公路通常是指縣道、鄉道和村道的總稱,縣道的適應交通量為5000—15000輛/日,設計行車速度60—80 km/h,屬二級公路體系,鄉道適應交通量為2000—6000輛/日,設計行車速度30—40 km/h,屬三級公路體系,村道的適應交通量為400—2000輛/日,設計行車速度20 km/h,屬四級公路體系。當前,鄉村公路規劃的主要方法包括:四階段法、直線連接法、節點重要度法以及交通區位法等。每種方法均有自身適用的對象,如四階段法適用于交通相對密集的縣道,交通區位法適用于區域內主干線規劃。但是,現有的規劃方法也有其缺點,總的來說,當前的鄉村公路規劃理論主要集中于公路本身,并以鄉村公路布局為主導,以交叉路口、場站等規劃為輔助,缺乏對周邊空間信息的綜合考慮,其主要局限性為以下三個方面:(1)以城鄉公路網規劃代替農村公路規劃,導致理論發展存在局限性;(2)傳統城鄉道路規劃法沒有充分考慮鄉村地區環境的特殊性與復雜性;(3)定性與定量相結合的方法在科學性上仍存在較大提升空間,目前流行的空間信息理論定量分析法在鄉村公路規劃中應用較少,存在改進的空間。
2.基于無人機傾斜攝影的實景三維空間信息技術體系
2.1 無人機傾斜攝影技術
無人機傾斜攝影技術主要包括影像采集、影像加工以及模型生產三個階段。影像采集階段是利用無人機及攝影設備獲得多方位、多角度的區域影像信息;影像加工階段通過影像檢查與整理、影像聯合平差、影像密集匹配、影像修正以及數字表面模型生產等過程,初步得到區域空間信息;模型生產階段利用自動化建模軟件進行勻光勻色等步驟,建立起實景三維空間模型。
2.2 實景三維空間信息技術
空間信息技術主要依靠“3S”技術,即遙感(RS)技術、定位導航系統(GPS)和地理信息系統(GIS),其中,GIS技術經過幾十年的發展,已成為空間信息技術的重要組成結構。上世紀90年代以來,GIS技術逐漸應用于交通基礎設施領域,在保障安全性和實用性基礎上,節約了大量的人力、物力、財力,但是也存在一些技術瓶頸,如二維分析如何與三維實體相結合、空間信息如何與專家經驗以及數學模型相結合、三維可視化如何更好地實現等。
2.3 技術體系的建立
遵循科學性、整體性、可行性以及動態性原則,以實現鄉村公路規劃與村莊規劃統一協調、實現多方規劃利益者的共同參與、實現規劃方法技術的高效率和低成本為目標,將無人機傾斜攝影技術與3D GIS技術相結合;通過傾斜攝影信息采集、實景三維空間信息構建以及應用準備三個步驟,得到具有實景、DSM以及DOM等多種信息的實景三維空間信息,并將其應用于農村公路規劃的多個階段,最終建立起基于無人機傾斜攝影的實景三維空間信息技術鄉村公路規劃體系(如圖1所示)。
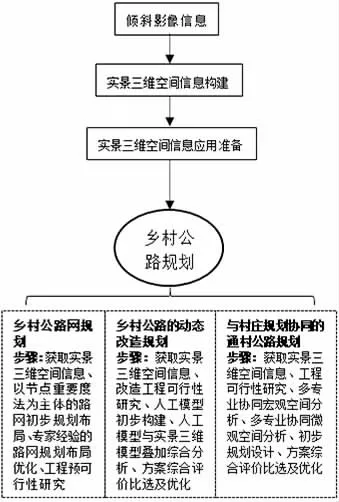
圖1鄉村公路規劃體系
3.案例分析
3.1 案例背景
海南海口市美蘭區位于海口市東北部東接文昌市,南連瓊山區,西接龍華區,北臨瓊州海峽,總面積約為581 km2,總人口約71萬,下轄9個街道,4個鎮共計53個行政村,全區鎮級以下公路500余條,總長度超過800 km,對于促進當地的經濟發展、增強城鄉統籌規劃具有重要意義。案例區位于麻余村,項目已完成高分辨率下的遙感衛星場景制作。為了推進鄉村公路與村莊建設的協同規劃,增強當地人民群眾的參與感,使村民能夠直觀了解本村公路規劃后的整體效果,故本項目擬采用無人機傾斜攝影進行鄉村公路的規劃實踐(如圖2所示)。

圖2案例區衛星圖
3.2 規劃流程
步驟一:可行性研究。結合工程項目的相關調研資料,對項目進行技術、經濟的可行性分析,特別是進行無人機傾斜攝影數據采集的可行性研究,之后,進行目標地塊的空間信息融合。其實景三維空間信息應用部分包括單體建筑物的三維精細建模、實景三維模型的建立以及GIS平臺對接等相關內容(如圖3所示):
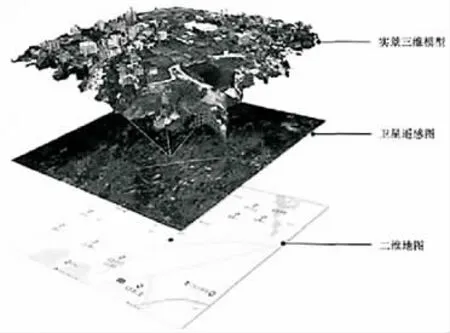
圖3目標地塊的空間信息融合示意
步驟二:進行無人機傾斜攝影數據采集。采用大疆inspirel作為飛行平臺,將無人機和攝影設備進行組裝后,使用雙“S”型航路規劃對目標區域進行傾斜攝影原始數據的采集(將搭載的單鏡頭和pix4d移動軟件配合使用,可以達到與使用無鏡頭相機進行圖像采集基本相似的結果),采集時將目標區域分為若干個200 m×300 m地塊進行單獨的數據采集。
步驟三:實景三維空間信息構建。將傾斜攝影原始數據經自動化生成后處理為osgb格式文件,經幾何校正、聯合平差,以及連續TIN三角網等過程處理后,得到目標區域的傾斜攝影三維模型數據;根據圖像識別及路徑判斷的相關原理,將滿足一定傾斜度以及重合度(60~70%)的數據進行拼接,得到像采集位置點云圖;然后基于點云模型,采用平鋪圖像于點陣的方法將二維模型生成三維模型,最終得到實景三維模型(如圖4所示):
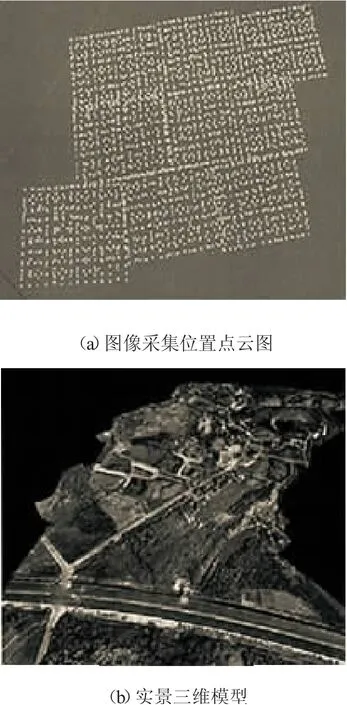
圖4三維空間信息的構建
步驟四:實景三維空間信息的應用。首先是進行單體三維精細建模,采用3dmax三維建模軟件對目標區域的重點建筑物、公路、景觀小品等進行實體建模;然后將實景三維模型和單體三維精細模型一同導入GIS平臺中,并與高分辨率三維場景進行匹配和疊加(如圖5所示):
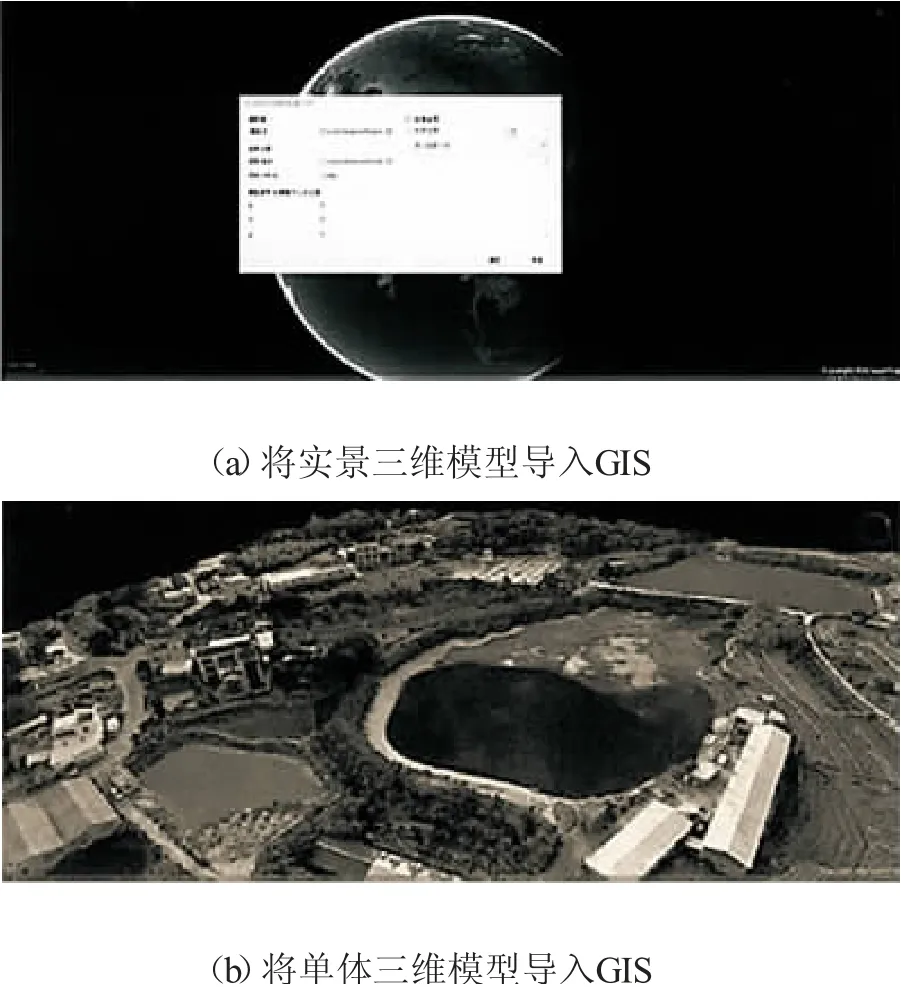
圖5實景三維空間信息的應用過程
步驟五:成果展示。將得到的目標區域三維模型進行多種途徑的展示,并分為現有三維現狀、擬采取的改造、規劃方案,以及規劃改造后的不同時期效果進行對比展示,使項目主管及普通民眾對規劃結果有一個直觀認識,以便于規劃方案得到進一步地詳細分析及改進(如圖6所示):
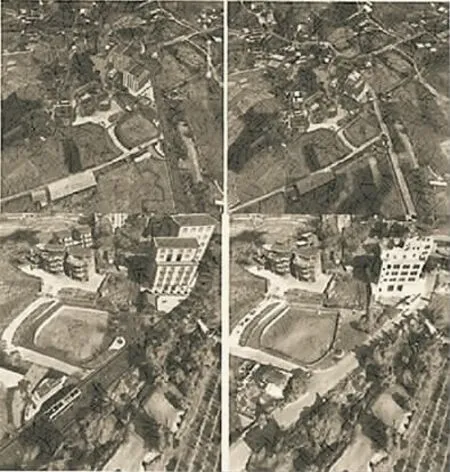
圖6規劃改造成果展示
3.3 應用成果評價
在無人機傾斜攝影及GIS技術支持下,實現實景三維空間在鄉村公路規劃中的應用,能夠獲得更加準確的空間位置信息,相較于傳統的二維平面規劃技術,其主要優勢有以下幾點:(1)模型具備完整的三維特征,更加直觀具體化;(2)能夠快速高效對目標區域進行測繪分析,節約人工和成本,解決了傳統測繪工作的局限性;(3)利用實景三維模型可以在一天內實現對村鎮信息的統計,方便其真實高效地與城鎮規劃相比較;(4)完成實景三維模型后,可以為后續的相關規劃和保護工作提供完備的空間信息、數據信息及其他數據,并可以實現疊加設計規劃的影響預測和判斷,極大提升規劃設計的科學性;(5)實景三維空間信息模型的精度較高,在本工程中平均平面中誤差和高程中誤差僅為0.083m和0.299m。
與此同時,在本工程實施過程中,發現需要在今后解決的一些問題:如因數據量過大需高性能數據存儲硬件支撐、在植被茂密區域容易導致數據失真、當目標區域過大時,需要采用大型無人機進行數據采集等。
4.結束語
本文以無人機傾斜攝影技術為基礎,結合3D GIS空間信息技術,建立起鄉村公路規劃方法體系,實現了實景三維空間技術在鄉村公路規劃中的應用,該方法不僅解決了傳統二維平面規劃時存在的局限性,而且大大節約人工和成本,并能為規劃者及其他利益相關者提供真實高效的空間位置信息,大大提升了鄉村道路規劃的科學性,值得在今后的工作中推廣運用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
商品與質量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人民交通(2019年16期)2019-12-20 07:04:10
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國公路(2017年12期)2017-02-06 03:07:33
中國衛生(2016年2期)2016-11-12 13:22:16