基于機器視覺的礦用皮帶運輸機故障智能檢測系統
2020-08-27 05:29:40頊熙亮
煤礦現代化 2020年5期
頊 熙 亮
(同煤國電同忻煤礦有限公司,山西 大同 037001)
0 引 言
煤炭安全生產是全國安全生產工作的重中之重[1]。帶式輸送機是一種廣泛應用于煤礦井下的連續長距離運輸機械,與其他運輸方式相比,帶式輸送機系統的優點在于其連續運行能力強,運輸能力強,長距離運輸能力強,效率高,使用方便,易于實現自動控制等[2]。如果在生產過程中帶式輸送機發生事故,將嚴重影響煤礦安全生產,并造成較大的經濟損失[3-4]。因此,采用有效的方法和技術檢測皮帶異常,減輕損害,甚至避免可能發生的事故,對煤礦安全生產具有重要意義[5]。本文通過回顧礦用皮帶的事故原因和檢測技術的技術上,提出了基于CCD 相機進行圖像捕捉的礦用皮帶運輸機新型故障檢測方案,并對其在實例煤礦中的應用進行了詳細的闡述,以期對相關行業的技術發展提供借鑒。
1 煤礦皮帶事故原因分析及常見檢測技術綜述
1.1 常見煤礦皮帶事故原因分析
根據煤礦現場調查,95%以上的煤帶輸送機事故與皮帶縱向撕裂、皮帶跑偏、水煤堆積等有關。
1)皮帶橫向斷裂。輸送帶在實際使用前必須連接成環形。皮帶縱向撕裂傳送帶的一個弱點是它們對切割、撕裂和沖擊的抵抗力差,這大大降低了它們的壽命。縱向撕裂是對輸送帶危害最大的一種破壞形式,其主要原因是輸送的煤與廢石、鐵棒等外來重、尖物體混合在一起造成的。如果不及時控制,這些異物容易卡住劃傷,滲透進輸送帶,造成輸送帶縱向撕裂。研究表明,約80%的皮帶撕裂發生在加載點或附近,另有15%發生在卸載點附近。可能導致皮帶撕裂的其他原因包括皮帶因某種原因產生偏差、超載等,在這種情況下,輸送帶會被皮帶輪的上蓋或托架的尖銳邊緣劃傷。
2)帶偏差。頻繁的皮帶跑偏故障會增加皮帶的磨損,縮短皮帶的使用壽命,有時會導致嚴重的皮帶撕裂,甚至造成人員傷亡。造成皮帶偏差的原因有很多。第一個原因是皮帶和皮帶輪質量差,在運行時造成皮帶變形和偏差。滑輪、齒條等輔助設備安裝質量差,不能很好地滿足技術規范要求,容易造成負載不平衡和皮帶偏差。
3)煤炭帶水和碎煤堆積。由于地下采煤工作面突水等原因。有時煤里有很多水。當原煤含水率大于20%時,煤水混合物表現為流體粘性狀態,俗稱水煤。如果有太多的水煤,就很有可能引起皮帶打滑,和其他事故。此外,煤傳輸過程中,由于水煤和皮帶是低摩擦,水煤在輸送機尾部累積威脅礦井安全生產。此外,碎塊煤(粒度分布范圍約5 毫米)與水煤一樣,由于流動性強,在自身重量的作用下,容易在輸送帶尾部堆積,造成煤堆事故。
1.2 煤炭輸送皮帶監測技術綜述及局限性
近幾十年來,在輸送帶故障檢測、狀態監測和保護方面做了大量的工作。它們大多利用光電傳感器或壓力傳感器來檢測異常或損壞。到目前為止,凸帶防帶滑偏斷層的技術和系統已經非常成熟,其中許多技術和系統在煤礦中得到了有效的應用。然而,目前仍沒有實用可靠的解決皮帶縱向撕裂事故的方法。根據工作機制,現有的技術和系統大多可分為以下兩類:
1)檢測輸送帶的外部變化。這類探測器包括煤泄漏探測器、撕裂壓力探測器、條形探測器、帶寬探測器等
2)檢測輸送帶內部狀態。這種探測儀采用x 射線探傷、超聲波探傷、電磁感應等方法來檢測皮帶的內部狀態,通過比較皮帶可能損壞前后的內部物理變化來評估皮帶的工作狀態。
綜上所述,現有的輸送帶監控保護設備和系統存在如下問題:
1)技術上,所使用的大多數技術相對落后。用于檢測外部皮帶變化的設備主要利用光電傳感器、壓力傳感器等來檢測漏煤或皮帶寬度,進而對皮帶的運行狀態進行評估。這種類型的探測器的缺點是后報警和低可靠性。
2)目前,傳感器的穩定性和質量仍然很低。傳感器是檢測數據的來源。因此,這些設備的穩定性和質量是決定檢測系統可靠性的關鍵因素。
3)大部分檢測是后檢測和后報警,而不是預警。這意味著他們只能盡量減少損失,而不能避免損失。
4)有些檢測系統非常昂貴。例如,電磁感應檢測器被設計成將導電橡膠或光纖嵌入到帶中。制造過程非常復雜和昂貴。
2 基于機器視覺的運輸機故障檢測系統設計和應用
2.1 系統總體設計
多年來,隨著電子技術和計算機技術的進步,越來越多的凸帶監控與保護領域的研究工作在非接觸方向進行,特別是采用了基于機器視覺的技術。機器視覺是一門交叉學科。它通常被認為是計算機視覺的一個子領域,包括人類視覺的神經計算研究和自主機器人柔性視覺系統的開發。機器視覺可以提供與人眼相同的功能——在數千種色調中進行區分,在大范圍的環境照明中提供敏銳度,以及在三維空間中感知物體,等等。通過使用可見和紅外攝像機、成像掃描儀或其他傳感器,計算機視覺收集數據以供機器處理。數據處理可以使用經典的圖像分析程序,并可以計算模擬人類神經生理學。基于機器視覺的工具具有非接觸式測量的優點,無需停止生產過程,并已成功地應用于各種工業領域,包括瓶子表面缺陷的檢測等。
在分析現有煤礦輸送帶監控與保護技術和系統局限性的基礎上,提出了一種基于機器視覺的煤礦輸送帶實時監控系統,并將其應用在了同煤國電同忻煤礦當中。其原理是使用專業CCD 相機來監控主要因素導致煤礦輸送帶縱向撕裂、橫向斷裂等事故,然后通過高清圖像處理檢測皮帶可能的損壞和異常情況,如外來的大塊頭和尖銳的物體,水煤、碎煤的堆積等。目的是及時檢測可能損壞輸送帶的異常情況,使系統能夠正常工作根據風險等級提前預警并關閉輸送系統。系統包含10 個功能模塊,分別是圖像采集模塊、圖像處理模塊、圖像識別模塊、智能監控報警模塊、數據庫服務管理模塊、機械橋調整模塊、照明模塊、同步控制器模塊,電氣控制箱模塊,數據通信控制模塊。系統的架構所提議的系統架構如圖1 所示。
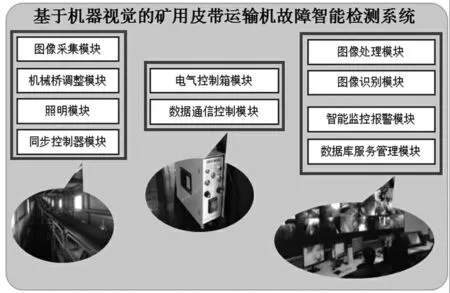
圖1 基于機器視覺的運輸機故障檢測系統總體構架
2.2 圖像采集模塊設計及識別過程
采集高質量的圖像有助于提高故障診斷的準確性,減少圖像處理時間,提高視覺檢測系統的實時性。配備有線陣光源的CCD 相機具有更高的分辨率,更適合于一維運動目標的檢測。在運輸過程中,作為輸送帶的上輸送帶通常是向上傾斜的,下輸送帶基本呈扁平狀。相機被要求安裝在上下皮帶之間,以從皮帶后面捕捉圖像。但在工程中,上下皮帶之間的距離很小,小于輸送帶的寬度。即使對于較低的皮帶,圖像采集裝置的安裝位置也非常小。以煤炭工業用皮帶為例,上、下皮帶之間的距離一般小于1m,但皮帶寬度一般大于1m。此外,輸送帶運行速度高達5.7m/s。因此,為了可以廣泛的覆蓋帶的表面,一般的設計需要多臺相機的集中拍攝,然而,這將不可避免地導致成本的增加,另外,長距離運輸帶需要對多個區段進行監控,過多的相機不利于在線監控系統的運行。同煤國電同忻煤礦的實例采用多個線性光源為圖像采集裝置提供光源。配備5 個線性光源的單臺線陣CCD相機捕捉上帶表面圖像,原理圖如圖2 所示。相機和光源均被放置的可調節方向的剛架上,與機械矯正模塊相連接,以便進行方向和亮度的調節。
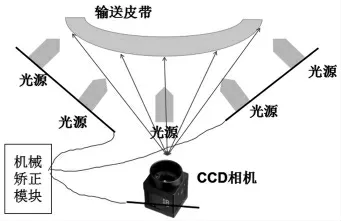
圖2 5 個線性光源的單臺線陣CCD 相機捕捉模塊示意圖
在有線性光源的凸帶平面上,這五個線性光源布置在凹槽中,凹槽與上帶的形狀一致。線相機就放在帶下面。當鏡頭的視場足夠大,并將線性光源調整到合適的位置,CCD 相機就可以對整個皮帶進行成像皮帶圖像采集完成后,進行圖像處理和故障診斷,監控皮帶運行狀態。因此,后續圖像處理和故障識別能力是檢測輸送帶運行狀態的關鍵。
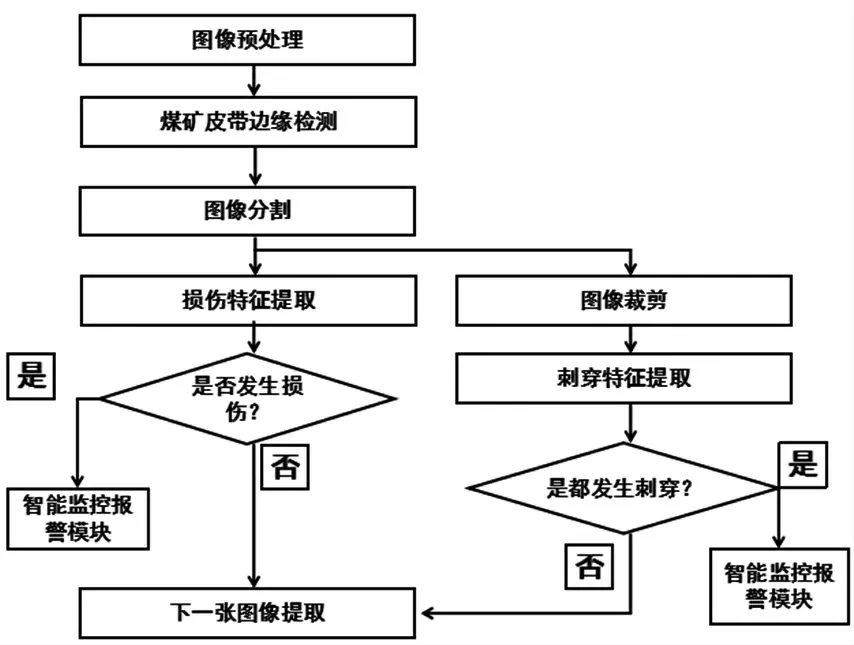
圖3 CCD 相機捕捉圖像后的處理過程
圖3 給出了從帶圖中檢測故障的框圖。首先圖像采集模塊包括從CCD 相機實時捕獲和存儲數字圖像(如圖2 所示)。高清晰度圖像被發送到圖像處理模塊。然后,圖像處理模塊負責在接收到的視頻幀上應用不同的圖像濾波器,識別帶邊緣來裁剪圖像,以促進異常特征識別階段。它執行圖像分析、圖像分割、圖像增強、降噪、幾何變換等。圖像識別模塊負責異常和缺陷特征的識別。將帶縫缺陷視為邊緣和角部特征,將可能導致縱向帶撕裂、尖物刺穿視為目標特征。對采集到的皮帶圖像進行預處理,對圖像進行改進。對改進后的帶圖像進行分割,得到二值圖像。從二值圖像中提取帶偏特征,識別帶偏。在本系統中,對于裂縫檢測,首先對二值圖像進行裁剪,以避免背景噪聲,canny 算子將與小波packe 分解相結合,完成邊緣和角點檢測任務。通過對裁剪后的圖像提取撕裂特征,可以識別出帶的縱向撕裂。采用高斯差分作為斑點特征檢測器。
之后,智能監控報警模塊根據圖像識別過程的結果,根據預定義的基于異常的規則對嚴重性等級進行分類,系統通過外部接口模塊根據風險等級進行預警和關閉輸送系統。數據庫服務管理模塊負責連接本地和遠程數據庫并實現公共數據庫操作。所有圖像信息處理完畢圖像的結果存儲在數據庫中。數據可以用于特征學習,將來用戶還可以回顧一個特定區域經常發生的故障,并不斷修正風險等級。
機械橋調整模塊和光源模塊負責CCD 相機和光源的方向調整準確,以確保皮帶下方的CCD 相機有很好的視覺照明效果。同步控制器模塊負責協調圖像捕獲和照明。
電氣控制箱模塊是為煤礦井下及IT 行業設計的,由起動器和饋線組成,用于向整個系統安全供電。
數據通信控制模塊控制數據之間的傳輸和接收終端,如CCD 相機和計算機,以及包括全雙工的通信網絡通信路徑。外部接口模塊提供了靈活的外圍設備及輸送系統異步和同步訪問。
2.3 系統的實際應用流程
本文設計的系統在同煤國電同忻煤礦中的具體檢測過程如下:
1) 第一步是整個監控系統的初始化。帶式輸送機系統、CCD 像機、照明模塊必須協調并同步工作。
2) CCD 攝像機拍攝實時皮帶輸送機工作場景的圖像。
3) 將獲取的實時圖像發送到計算機進行圖像處理。有三種圖像處理的主要步驟,包括面積分析,對比度分析和漸變分析。圖像處理后,就可以進行圖像識別了。
4)在圖像識別步驟中,識別異常和故障特征。在這種情況下,特征檢測器通過模式匹配找到異常點,如圖4 所示的便是同煤國電同忻煤礦中2 號巷道輸送機系統識別出的一些故障。

圖4 該系統在同煤國電同忻煤礦中2 號巷道輸送機中識別的皮帶縱向裂紋
5)智能監控報警模塊接收圖像發送的檢測結果識別模塊。然后,對檢測結果的危險等級進行評估預定義基于異常的規則。評估為危險等級2,表示存在一個對皮帶的潛在危害。
6)根據異常的危險程度采取響應措施。在這種情況下,警報被觸發,使帶式輸送機操作員可以迅速注意。
3 結 論
綜上,作為煤炭生產中最重要的運輸設備,煤礦帶式輸送機常見事故原因包括縱向撕裂、偏差等。然后,介紹了目前主要的監測方法和方法對這些煤礦帶式輸送機事故的技術進行了分類,并對其存在的問題進行了分析和總結。為了克服現有系統的不足,提出基于機器視覺的礦用皮帶運輸機故障智能檢測系統。該系統將有助于檢測最可能出現的皮帶事故,及時給予預警,從而幫助改善可能的生產損失。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
