城市不透水面遙感提取應用探討
2020-08-27 06:01:16熊助國劉向銅
江西科學 2020年4期
徐 看,熊助國*,劉向銅,劉 鑫
(1.東華理工大學測繪工程學院,330013,南昌;2.廣州市南沙區土地利用發展中心,511548,廣州)
0 引言
不透水層是指能夠阻止水直接滲透到土壤中的任何自然和人工表面,主要由城市中的水泥、瀝青、金屬和玻璃等材質構成的交通用地(如高速公路、停車場、人行道)、廣場和建筑物屋頂等組成[1]。不透水層的快速擴張也導致了一系列的城市環境問題:地表下沉、水源污染以及熱島效應,同時不透水層分布的變化也能夠直接反映出城市的發展和擴張[2]。因此,高效、準確、及時地獲取不透水層對城市生態建設及監測城市動態有其重要意義。
隨著對地觀測技術的發展,遙感傳感器已經能夠長時間連續觀測城市表面。與傳統的人工調查方式相比,基于遙感技術提取不透水層更加省時、省力、低成本,其相關理論方法也已經得到國內外的廣泛研究[3]。目前,不透水層的提取方法研究主要集中在光學遙感上,合成孔徑雷達(synthetic aperture radar,SAR)以其全天時、全天候、強穿透的成像能力,已經成為光學遙感的有益補充,有時甚至是數據獲取的唯一手段[4]。在SAR影像信息中,不透水面區別與其他地物,在長時間基線中具有較強的相干性,可根據這一地物特性將其從其他地物分離出。此外不透水面在 InSAR 反演的平均后向散射系數、振幅比等參數均與其他地物有所差異[5]。因此利用雷達遙感數據對不透水層的提取是具有可行性的。綜上所述,遙感技術在不透水層提取中的應用正不斷創新發展,為城市發展和城市生態建設提供源源不斷的動力。
1 光學遙感提取不透水層的現狀
隨著遙感技術的迅猛發展,利用遙感數據進行大范圍城市不透水面的估算和制圖是一種廉價高效的技術手段[6]。目前已有大量學者研究基于光學遙感手段提取不透水面信息。不透水面遙感信息提取方法主要包括指數法[7]、分類回歸樹法[8]、支持向量機法[9]和光譜混合分析法[10]等。
1.1 光譜混合分析法
在采用光譜混合分析法提取不透水層中,其理論模型基礎就是Ridd[11]首次提出的植被-不透水層-土壤(vegetation-impervious-surface-soil,V-I-S)分布模型。VIS模型主要用于城市遙感影像中的土地。 假設它由植物、土壤和不可滲透層這3個終端要素組成,則城鎮中主要的土地覆蓋類型基于這3種終端要素,并且比例不同。在圖1中,中央商務區具有高不可滲透層,植被與土壤的比率非常低。在中等密度的居住區中,植被和不滲透層的比例分別占近50%。綜上所述,可以提取這3個最終要素的分布情況分析和評估城市土地利用狀況。
光譜混合分析法相比與其他方法能夠有效解決中低空間分辨率遙感影像中的混合像元情況,現有的城市防滲層提取研究已經廣泛使用基于VIS模型的光譜混合分析來分解混合像素[12]。但是由于中低空間分辨率圖像在空間分辨率和光譜分辨率上都存在著自身局限性,而且光譜混合分析模型建立基于理想模型,忽略了光線在不同地物像元間的相互作用,會造成低值區高估、高值區低估[13],影響到整體估算精度,該方法的使用受到了一定得局限性。在后續研究中,閆如柳[14]等針對V-H-L-S模型在提取不透水面中端元選取不足的問題,提出了一種基于Landsat-8OLI影像提取不透水面的新方法,但其閾值的選取會對提取精度造成影響;要志鑫[15]等提出結合BCI指數(Biophysical Composition Index)的線性光譜分解方法提取不透水面、植被和土壤蓋度,提高了傳統的線性光譜分解方法的精度,但其在大范圍區域選取仍然會存在混合像元情況,影響提取精度; Xu[16]等采用改進的線性光譜混合分析方法提取了不透水的表面部分,這一研究目前得到了廣泛的應用。
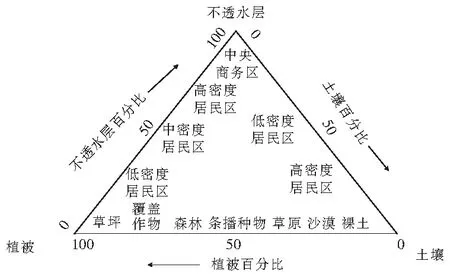
圖1 V-I-S 模型
1.2 指數法
指數方法的理論基礎是光學影像信息中的各地物的光譜特征,其根據不透水層的光譜特征不同與其他地物的光譜特征從影像信息中分離并建立出能夠代表不透水層分布及與其他地物具有較高分離度的特征指數模型。經典指數法提取流程如下圖2所示。
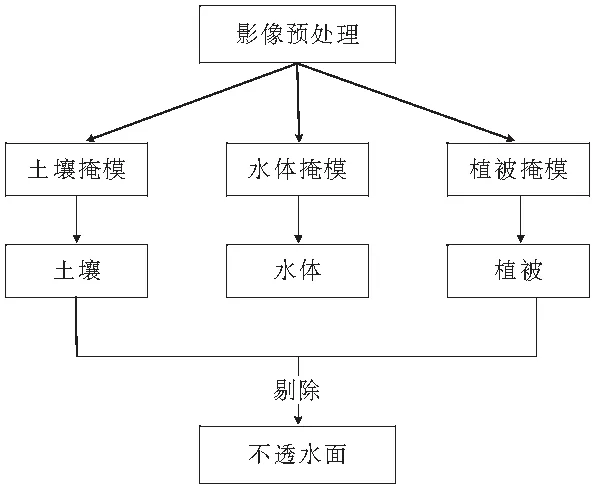
圖2 經典指數法提取流程
相對于其他方法,指數法具有計算相對簡單、更加高效的優點。但是,指數法的研究關鍵是其分割閾值的準確提取,目前的閾值提取大部分采用自定義閾值。因此,對閾值的自動化提取是未來研究的主要方向之一[17]。這種提取方法還存在著另一方面的問題,不透水層指數不能和真實地物的不透水層實現關聯分析,因此對提取結果就很可能進行絕對量化分析。在后續研究中,楊栩[18]等在可見光波段范圍內建立綠-藍光譜特征空間,構造了能夠將土壤、植被像元與不透水面像元有效分離的綠-藍不透水面指數,該指數能夠代替歸一化差值不透水面指數、垂直不透水層指數、比值居民地指數等,應用于無人機遙感影像的不透水面信息提取中;文獻[19]首次采用復合波段的形式創建了歸一化差值不透水面指數(Normalized Difference ImperviousSurface Index,NDISI);為了提取大范圍的不透水面,Liu等提出了歸一化城市區域復合指數(NUACI),其建立的依據是基于歸一化水體指數(NDWI)和增強植被指數(EVI)[20];綜上所述,若要利用指數方法提取出不透水層,則需要通過設定相應的閾值大小對指數結果進行分類。
1.3 回歸方法
盡管光譜混合分析是監視不透水層的有效方法,但此方法可能不適用于大面積和復雜區域,因為在這種情況下,獲取代表純像素的最終元素光譜特性并不容易,從而影響了不可滲透層的提取精度[21]。因此針對地形復雜的大范圍區域的提取不透水層情況,可以采用回歸及回歸樹模型[22]。回歸方法通過地面特征的光譜特征與不透水層的比例之間的關系建立回歸函數,以估計局部不透水層的分布。使用較多的地物特征為原始光譜特征、歸一化植被指數等。
建立回歸模型操作簡單,可利用該模型快速獲得大區域逐像元的不透水面。但是此方法易受季節影響,地物植被隨著季節的變化會影響回歸模型提取精度。目前已有學者在基于回歸分析的方法上進行了改進,Liu[23]等提出了利用中分辨率遙感圖像提取植被、土壤和不透水面的定量信息的分析方法(MESMA),但其定量分析的數據易受圖像本身分辨率的影響,其提取結果并不足以信服;劉帥[24]等結合空間-光譜組合核函數和支持向量回歸,提出了一種提取高光譜影像不透水面豐度的改進算法;Wu[25]等提出了一種新穎的基于多尺度超像素的分層分類方法,實驗證明該方法具有優于傳統的基于像素的方法和單尺度方法進行城市不透水面提取的優勢。現有的研究表明,回歸方法能夠解決在地物復雜區域中地物光譜特征區分不明顯的問題,但其也受像元尺度和季節因素的影響,后續研究可就結合其他提取方法展開。
1.4 分類方法
提取不透水層的另外一種方法為圖像分類技術。其所采用的方法有人工神經網絡分類提取、建立隨機森林等分類技術。此方法中的不透水層表示的是一種地物類別,其獲取不透水層的分布情況是通過分析最終的地物分類結果得出的,即將地物類別分為不透水層和透水再進行判定。此類方法可以利用目前較為成熟的遙感分類技術從地物類別中分類出不透水層,其提取步驟較為規范化。根據分類目的,可以將這些分類方法分為基于像素的硬分類方法和基于子像素級的軟分類方法。
圖像分類技術也存在著如下缺陷。人工神經網絡方法收斂速度較慢,且其初始權重及隱含層數目和隱含層結點數難以確定,數據樣本要求高。亦有研究表明通過增加隱含層和結點數可提高模擬精度,還可減少局部極小的機率,但這會增加學習時間;而CART是一種弱學習算法。由于其學習能力,它對數據噪聲和訓練模式錯誤極其敏感。樣本訓練集中的微小波動會導致預測函數發生較大變化。因此其樣本的選擇必須具有代表性并且相對統一,以實現良好的學習能力。
但是亦有學者在算法上進行了結合與改進。Deng[26]等在隨機森林的基礎上提出了一種稱為連續亞像素監測(CSM)的新方法,用于連續監測和監測亞像素水平的城市不透水表面變化;Hu[27]等提出將CART算法與多源遙感數據相結合來估計亞像素級不透水表面的方法,該方法十分適合于植被中年內變化明顯的區域的多時間SPIS制圖。
綜上所述,基于光學遙感影像提取不透水層的方法較為繁瑣且存在光譜特征差異較大、高分辨率影像中的陰影等問題。因此,如何更加高效、精確地提取不透水層為下一步研究熱點。
2 基于雷達數據提取不透水層的研究現狀
雷達數據由于其較高的空間分辨率,較短的處理時間和較低的成本而越來越多地被使用。 相比與其他遙感數據,雷達數據只集中在地形的幾何特征上,并且能捕獲地形的絕對高程,尤其適宜提取城市建筑物。SAR數據處理流程如圖3所示。
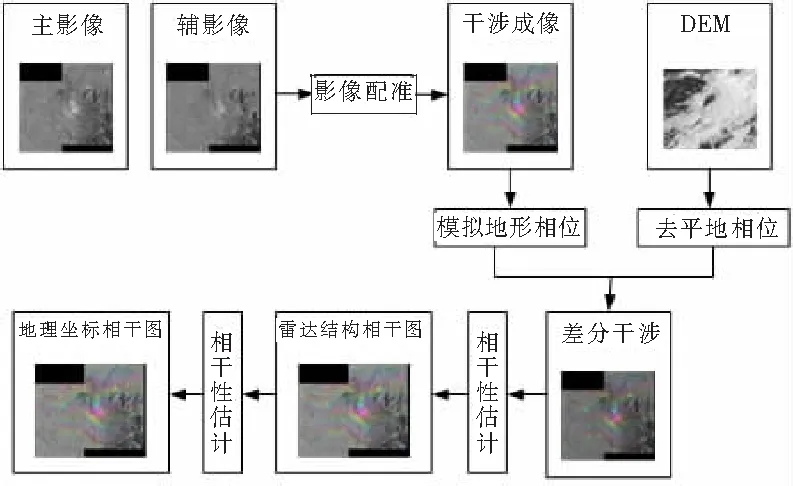
圖3 D-InSAR數據處理流程
目前,基于SAR影像信息提取不透水面信息主要是基于紋理特征區分地物。Zhang[28]等提出利用SAR影像信息對地物進行細分類的方法;Dumitru[29]等基于SAR圖像信息提出了研究區域內不同時間的不同用地類型的土地類型分類。此類提取方法高效、不受數據限制,但是完全基于SAR影像信息進行地物分類的精度并不高,雖然不同地物的紋理特征不同,但是一些地物的紋理特征十分相近,其提取閾值的選取十分困難甚至無法區分。
在提取不透水層方面, 廖明生等提出了基于CART集成學習的城市不透水層百分比遙感估算,證實了利用雷達干涉數據提取不透水層的可行性與潛力,但CART是弱學習算法,選取的樣本時間也不一致,影響提取結果[30]。現有研究已經表明將SAR遙感技術應用于提取亞熱帶城市不透水面具有其獨特的優勢。Zhang[31]等進行了利用光學和SAR遙感圖像提取城市ISA的比較研究,單獨的ETM +圖像比單獨的ASAR圖像提供更好的ISA估計。總的來說,由于SAR影像成像時的斑點噪聲和幾何形變,無法輕易消除SAR 影像信息中的誤差,因此,完全基于SAR影像信息提取城市不透水面信息仍然是目前遙感研究的難題之一。
3 融合多源遙感數據提取不透水層的提取現狀
目前,不透水層的提取研究主要集中在將不同類型的 SAR數據與光學數據融合來提高城市不透水面的提取精度。其原理是通過結合光學影像的光譜特征信息和SAR影像的紋理特征信息,采用不同的分類器在不同的級別上進行融合,結合兩類影像各自的優勢提高精度。
張鴻生[32]等提出了通過融合光學和SAR遙感數據提高不透水面提取精度的方法,實驗結果表明,融合光學和SAR數據提取不透水面再一定程度上可以彌補光學影像信息的缺失,在光學影像信息中加入了SAR影像信息的紋理特征,在一定程度上可以提高城市不透水面的提取精度。C Sukawattanavijit[33]等提出了一種利用SAR和光學遙感數據改進土地覆蓋分類的GA-SVM算法,結果顯示出提高的分類精度,并展示了使用GA-SVM算法的優勢,該算法使用較少的功能即可提供最佳的精度。Zhang[34]等通過探索SAR和光學數據之間的最佳集成水平,以更好地繪制珠江三角洲的城市土地覆蓋圖,研究表明將SAR數據的紋理特征與光學數據結合用于土地覆蓋分類的好處,研究還表明,與使用單一數據源進行城市土地覆蓋分類相比,將光學和SAR數據結合起來不能保證有所改善。
綜上所述,雷達數據與光學遙感數據的融合的方法可以在3個不同的層次上進行:像素級融合、特征級融合和決策級融合,3種融合方法都可以在一定程度上提高不透水面的提取精度。
4 新的融合方法
綜上所述,基于雷達數據提取不透水層是具有可行性的,融合雷達數據和光學遙感數據提取不透水層也可以在一定程度上提高精度,但是雷達數據的不同也會影響提取精度。目前,部分雷達數據已經面向大眾免費提供,在一定程度上解決了數據獲取難及數據量不足的問題。
因此,本文研究探討了一種融合多源遙感數據提取不透水層的具體理論與實現方法。首先研究基于D-InSAR技術利用哨兵1號(Sentinel-1A)多極化數據提取不透水層,哨兵1號(Sentinel-1)衛星是歐洲航天局哥白尼計劃(GMES)中的地球觀測衛星,由2顆分別于2014 年4 月與2016 年4 月發射的載有C波段合成孔徑雷達的衛星組成,中國地區重返周期為 12 d。并將提取結果與同時期基于指數法利用landsat8數據影像提取不透水層的結果進行對比。此方法主要是提出了一種新的基于紋理的圖像分類技術通過建立隨機森林提取出研究區不透水面信息,其理論路線圖如圖4。在此可行的基礎上,探究利用SBAS_InSAR技術提取出時間序列的南昌地區不透水層,分析時間序列的不透水層的變化與當地經濟發展、生態環境、土地利用等方面的關系。在理論上,該方法具有可行性。在后續研究中,擬探討基于L波段的ALOS多極化數據提取不透水層,并將提取精度結果與基于C波段的數據提取不透水層的精度結果進行對比,分析波段的不同對提取結果的影響。由于多源遙感數據融合能獲得更高精度的不透水面,在之前研究都完成的基礎上,可以探討融合雷達數據(Sentinel-1A數據、ALOS數據)和光學遙感數據(landsat8數據)提取不透水層的方法,擬采用SVM分類器或者ANN分類器,在數據量足夠的情況下,還可以研究融合數據提取的不透水層在時間序列上的變化情況。
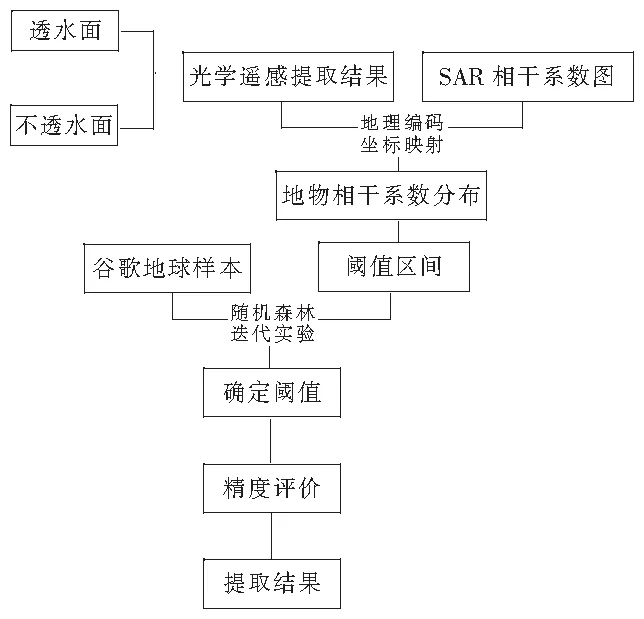
圖4 理論技術路線
5 結束語
基于遙感影像提取不透水層的廣泛研究中,由于遙感影像數據源的不同和遙感影像信息處理的復雜性,在保證高效、及時的基礎上,如何提高不透水層提取的精度仍然是一大研究難點。基于光學遙感影像信息提取不透水面的總體精度容易受到光學成像時云層遮擋及大氣影響問題,容易產生光譜混淆;而完全基于SAR影像信息提取不透水面又極易受到分辨率低、噪聲問題等影響;因此總體來講,基于多源數據融合提取不透水層是目前研究的主要方向,而具體的融合方法也將成為一個研究重點。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
