一種基于視覺的車載照明自動跟蹤系統
2020-09-02 06:31:23張鵬趙逸凡萬茂松
軟件導刊 2020年8期
張鵬 趙逸凡 萬茂松


摘 要:目前夜間事故勘察車載照明多采用傳統自適應燈光,存在照射范圍有限且調節照明方向繁瑣等問題。因此,基于視覺設計一種車載照明自動跟蹤系統。使用視覺處理技術與雙步進電機控制對車載照明系統進行改進,以增強車載照明智能化和靈活性。針對傳統自適應燈光需人為操縱照射目標的問題,車載照明系統在運行時對紅外光源(移動目標)進行圖像檢測,實時反饋拍攝圖像中紅外光源位置坐標,再根據位置坐標信息控制雙步進電機,帶動車載照明燈準確地照射到紅外光源坐標位置。實驗結果表明,該系統可快速檢測到照明目標位置坐標,準確控制步進電機移動,可滿足跟蹤目標的要求,準確率達95%。
關鍵詞:視覺處理;紅外光源;步進電機;目標跟蹤
DOI:10. 11907/rjdk. 201432 開放科學(資源服務)標識碼(OSID):
中圖分類號:TP319文獻標識碼:A 文章編號:1672-7800(2020)008-0161-04
Abstract:Aiming at the problems such as limited illumination range and complicated direction adjustment of vehicle lighting system, we propose an automatic tracking system of vehicle lighting based on vision. In order to enhance the intelligence and flexibility of vehicle lighting system, visual processing technology and dual step motor control are used to improve the vehicle lighting system. This vehicle lighting system detects the infrared light source (moving target) in the running time, feeds back the position coordinates of the infrared light source in the shooting image in real time, and then controls the dual-step motor to drive the vehicle lighting to accurately illuminate the coordinates of the infrared light source according to the position coordinate information. Through experimental verification, the system can quickly detect the position coordinates of the lighting target, and accurately control the movement of the stepping motor to complete the requirements of tracking the target.
Key Words:vision processing; infrared light source; stepper motor; target tracking
0 引言
夜間戶外作業需要照明,如果照射對象是移動目標,則照明燈需具有目標跟蹤功能。目前,照明燈對移動目標的跟蹤一般采用人工操作的方式實現[1],這不僅增加了操作人員勞動強度,而且存在跟蹤不及時、照明效果差的問題,特別在一些危險作業的場合,如交通事故處理現場,容易發生二次事故,對工作人員的安全構成嚴重威脅。
車載照明自動跟蹤系統現有研究尚未成熟。多數照明控制系統適用于圖書館、大型商場、室內運動場、長廊等大型照明場合,只能對人員所處位置進行檢測,從而得到有人區域和無人區域,對有人區域實行高亮度照明,對無人區域則降低照明度或關閉燈具。該類采用圖像定位與跟蹤技術及PLC-Bus技術構建的智能照明控制系統無法在車輛上實現單一照明燈具實時監測跟蹤[5]。
目前機器視覺發展已較成熟,電機控制技術也得到廣泛應用,將兩者結合可產生很好的效果。因此,本文通過攝像頭采集照明目標上的紅外光源圖像信息,利用OpenCV[2-4]相關視覺算法處理圖像信息, 獲取照明目標位置信息,最后控制兩個步進電機相互作用,移動攝像頭和照明燈以對準照明目標所在位置,實現一種自動跟蹤照明目標的車載照明系統,增強傳統車載照明系統智能化和靈活性。
1 系統方案設計
車載照明跟蹤系統方案如圖1所示,主要由六大硬件部分組成:紅外光源(移動目標)、攝像頭、主控制器、電機控制模塊、雙步進電機及車載照明燈。系統功能實現主要由紅外光源位置檢測及處理與步進電機控制組成。攝像頭經過可見光濾鏡作用后,將照明目標上的紅外光源圖像信息采集給控制器,經過圖像預處理、閾值分割、形態學濾波及輪廓搜索視覺處理后,檢測出圖像中紅外光源位置信息。主控制器再根據紅外光源目標的坐標信息,計算出兩個步進電機移動到目標位置所需的運動方向和步進量,將計算結果傳給電機控制模塊,進而控制兩個步進電機移動,即控制照明方向在坐標內進行x軸方向和y軸方向的運動。同時,電機移動速率根據目標坐標大小確定,保證電機在快速移動的同時又能保證精度,電機位置經不斷調整,使照明方向對準照明目標所在位置。照明燈單獨固定在攝像頭臨近位置,照明方向和攝像頭照射方向一致,當系統跟隨紅外光源運動時,也相應帶動照明燈的運動,實現照明自動跟蹤。
1.1 紅外光源目標位置檢測
紅外光是一種不可見光,為快速檢測紅外光源的位置信息,首先圖像需排除可見光干擾,然后再對圖像進行圖像灰度化、高斯濾波、閾值分割、形態學濾波和輪廓搜尋算法處理,最后得到紅外光源在圖像中的具體坐標信息(x,y)。紅外光源目標位置檢測具體步驟為:
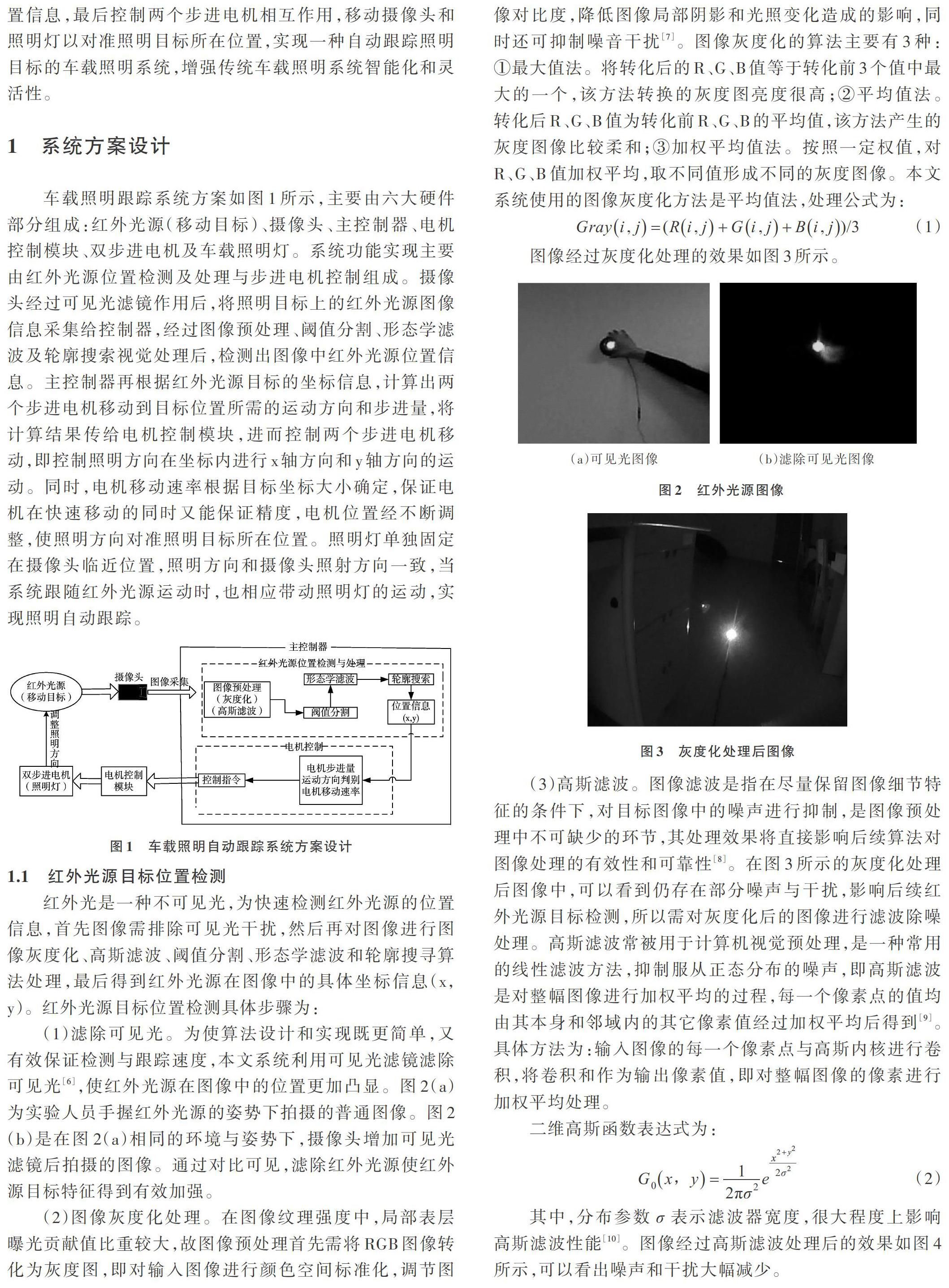
(1)濾除可見光。為使算法設計和實現既更簡單,又有效保證檢測與跟蹤速度,本文系統利用可見光濾鏡濾除可見光[6],使紅外光源在圖像中的位置更加凸顯。圖2(a)為實驗人員手握紅外光源的姿勢下拍攝的普通圖像。圖2(b)是在圖2(a)相同的環境與姿勢下,攝像頭增加可見光濾鏡后拍攝的圖像。通過對比可見,濾除紅外光源使紅外源目標特征得到有效加強。
(2)圖像灰度化處理。在圖像紋理強度中,局部表層曝光貢獻值比重較大,故圖像預處理首先需將RGB圖像轉化為灰度圖,即對輸入圖像進行顏色空間標準化,調節圖像對比度,降低圖像局部陰影和光照變化造成的影響,同時還可抑制噪音干擾[7]。圖像灰度化的算法主要有3種:①最大值法。將轉化后的R、G、B值等于轉化前3個值中最大的一個,該方法轉換的灰度圖亮度很高;②平均值法。轉化后R、G、B值為轉化前R、G、B的平均值,該方法產生的灰度圖像比較柔和;③加權平均值法。按照一定權值,對R、G、B值加權平均,取不同值形成不同的灰度圖像。本文系統使用的圖像灰度化方法是平均值法,處理公式為:
(3)高斯濾波。圖像濾波是指在盡量保留圖像細節特征的條件下,對目標圖像中的噪聲進行抑制,是圖像預處理中不可缺少的環節,其處理效果將直接影響后續算法對圖像處理的有效性和可靠性[8]。在圖3所示的灰度化處理后圖像中,可以看到仍存在部分噪聲與干擾,影響后續紅外光源目標檢測,所以需對灰度化后的圖像進行濾波除噪處理。高斯濾波常被用于計算機視覺預處理,是一種常用的線性濾波方法,抑制服從正態分布的噪聲,即高斯濾波是對整幅圖像進行加權平均的過程,每一個像素點的值均由其本身和鄰域內的其它像素值經過加權平均后得到[9]。具體方法為:輸入圖像的每一個像素點與高斯內核進行卷積,將卷積和作為輸出像素值,即對整幅圖像的像素進行加權平均處理。
(5)形態學濾波。數學形態學濾波算法是一種非線性濾波方法,主要用于圖像噪聲抑制、邊緣提取、目標檢測等[12-14]。因受噪聲干擾,初步分離出的目標區域圖像存在一些孔洞及細小碎塊,本文系統采用形態學濾波和輪廓搜尋方法進行去除,對前景圖像經過一次閉運算后可使孔洞得到填補,圖像上的孤立噪點也可得到很好的抑制。圖像經過形態學濾波處理后的效果如圖6所示,可見細小的孔洞被填補。
(6)輪廓搜尋。其目的有兩個:①找到各個連通域,單獨分割出目標;②根據輪廓特征去除干擾[15]。系統采用Freeman鏈碼搜索算法對檢測到的離散像素點進行八鄰域搜索,以最后鏈碼輪廓幾何特征消除形態學濾波無法去除的干擾點和空洞點,即根據幾何信息只保留面積大于一定閾值的輪廓,其它細小輪廓視為干擾源被丟棄[16-17],最終處理的紅外光源目標圖像效果如圖7所示。
經過試驗測試,攝像頭采集的圖像經過以上步驟視覺處理后,可以準確清晰地得到紅外光源目標的坐標信息,坐標信息以x軸坐標和y軸坐標的具體數據表示,以方便后續電機控制。
1.2 電機控制算法設計
本文系統跟蹤功能由兩個步進電機使照明方向在x軸方向和y軸方向進行調整實現,以滿足動態工作環境的照明需求。
紅外光源跟蹤實際上由兩個步進電機相互作用實現,電機控制算法流程如圖8所示。主控制器在計算得到紅外光源目標的位置坐標信息(x,y)后,判定位置坐標絕對值是否小于設定值(0,0),如果小于設定值,則不需要調整照明位置;如果大于設定值,則控制器根據紅外光源坐標信息計算兩個步進電機運動方向和步進量,并轉化成步進電機工作參數。步進電機工作時,移動速率并不是勻速的,當步進電機位置距離移動目標比較遠(坐標設定值為大于(5,5))時,步進電機根據指令以每秒10個坐標值的速率移動,當步進電機位置距離移動目標比較近(坐標設定值為小于(5,5))時,步進電機根據指令以每秒2.5個坐標值的速率移動,通過該移動策略既可保證步進電機快速調整到目標位置,又能保證步進電機移動精度。步進電機移動過程中,主控制器不斷獲取紅外光源目標坐標信息,并與設定值(0,0)進行比較,直到目標坐標信息變到(0,0)附近,即攝像頭中心和照明方向對準紅外光源目標時,系統停止調整,等待下一次調整。系統調整坐標誤差為(1,1),即坐標值的絕對值小于等于(1,1)時,系統停止調整。
2 實驗結果
2.1 紅外光源位置檢測與處理結果
在去除可見光干擾過后,進行圖像灰度化、高斯濾波、閾值分割、形態學濾波、輪廓搜尋等算法處理后,可精確找到紅外光源目標位置。紅外光源經過視覺處理的結果如圖9所示,紅外光源清晰,幾乎沒有其它干擾。
2.2 自動跟蹤測試結果
系統主控制器計算出紅外光源目標坐標值后,根據坐標值計算出電機需要移動的方向與步進量,進而控制步進電機按命令移動,一個移動命令結束后再次發送命令接收目標坐標,進入下一次調整,直到移動目標坐標在(0,0)附近。本文系統設定的絕對誤差為(1,1),當坐標值小于等于(1,1)時,系統停止調整。車載照明自動跟蹤測試結果如圖10所示,系統根據收到的紅外光源坐標信息,計算得到步進電機需要的移動數據,進而帶動照明燈和攝像頭,使其逐步調整到紅外光源目標位置,即由圖10(a)逐漸移動到圖10(b)位置,最后鎖定在圖10(c),使其坐標處于(0,0)位置,此時攝像頭和照明方向即鎖定紅外光源目標,實現車載照明自動跟蹤功能。
3 結語
本文結合視覺處理技術與雙步進電機控制技術對車載照明系統進行改進,實現了一種車載照明自動跟蹤系統。該視覺處理技術通過圖像灰度化、高斯濾波、閾值分割、形態學濾波、輪廓搜尋等算法處理后可精確找到紅外光源目標的位置,雙步進電機也能實現精準定位。實驗表明,本文設計的車載照明自動跟蹤系統可實現攝像頭與車載照明對紅外光源目標的自動跟蹤,增強車載照明系統智能化和靈活性;與傳統車載照明系統相比,可避免繁瑣的照明方向調節過程,滿足移動目標照明需求,提高了工作環境安全度且智能高效。
參考文獻:
[1] 凌建壽,朱瑛,喬大力. 基于LED車載警用照明照明組的檢測技術要求和測試方法研究[J]. 中國安全防范技術與應用,2018(3):58-61.
[2] 陳吉廬. ?基于OpenCV的紅外運動目標檢測與跟蹤算法研究及實現[D]. 南京: 南京理工大學,2010.
[3] 康杜. 基于OpenCV運動物體檢測與跟蹤[D]. 荊州:長江大學,2018.
[4] 李莎莎. ?基于Kinect傳感器的坐姿識別軟件設計及實現[D]. 成都:電子科技大學,2018.
[5] 劉甫,李晉. ?基于動態目標跟蹤技術和PLC Bus的智能照明控制系統[J]. ?照明工程學報,2008(3):62-66.
[6] 成春陽,黃淵博,盧鑫,等. 基于主動紅外濾光環視成像的車道線檢測算法[J]. 激光與光電子學進展,2018,55(12):288-296.
[7] 孟銳,金成軍,劉暢. 基于陰影線的智能車輛檢測及測距方法研究[J]. 吉林大學學報(信息科學版),2018,36(6):654-660.
[8] DEY A, SADHU S, GHOSHAL T K. Adaptive Gauss-Hermite filter for non-linear systems with unknown measurement noise covariance[J]. IET Science Measurement & Technology,2015,9(8):1007-1015.
[9] 顧李云. ?基于圖像處理的車牌識別算法的研究與設計[D]. ?南京:南京郵電大學,2018.
[10] 肖國宴. ?基于視頻的車輛檢測與分割算法研究[D]. ?南昌:南昌大學,2018.
[11] 胡淋波. ?基于紅外圖像的絕緣子分割算法的研究[D]. ?長沙:湖南大學,2017.
[12] 李鵬. ?低空空域無人機紅外圖像檢測技術研究[D]. 成都:電子科技大學,2018.
[13] BAI X, ZHOU F. Analysis of new top-hat transformation and the application for infrared dim small target detection[J]. ?Pattern Recognition, 2010, 43: 2145-2156.
[14] 劉忠領,于振紅,耿建君,等. 基于形態濾波的紅外圖像目標檢測方法[Jl. 紅外與激光工程,2013, 42(S01): 249-252.
[15] 徐偉斌. ?視頻圖像中手勢連續輪廓提取方法研究與實現[D]. ?杭州:杭州電子科技大學,2017.
[16] 葛藝曉. ?基于Freeman鏈碼特征值的示功圖分類識別研究[D]. ?馬鞍山:安徽工業大學,2014.
[17] 湯勇,顧宏斌,周來. 交互系統中實時手勢分割及指尖檢測方法[J]. 光電工程,2010,37(7),145-150.
(責任編輯:江 艷)
