帶有攻角約束的吸氣式高超聲速飛行器反步法控制①
2020-09-05 01:33:50馬曉川杜昊昱
固體火箭技術 2020年4期
馬曉川,陳 康,杜昊昱,閆 杰
(西北工業大學 航天學院,西安 710072)
0 引言
吸氣式高超聲速飛行器具有快速全球打擊、超音速突防、低成本空天往返等優點,在軍事和民用兩個方面都有很好的應用價值,是未來飛行器研究和發展的熱點。受高超聲速氣流的作用,吸氣式高超聲速飛行器受到的氣動力呈現較強的非線性和不確定性[1]。而發動機-機身一體化的結構造成了推力與氣動力矩耦合[2-3]。細長體結構的氣動外形又降低了飛行器的剛度,飛行控制中的氣動彈性問題更加突出[4-5]。針對于吸氣式高超聲速飛行器的特點, 控制[6]、滑模控制[7-8]、自適應控制[9-10]等控制方法被應用于高超聲速飛行器控制問題的研究。
反步法是處理吸氣式高超聲速飛行器非線性控制問題的有效方法。文獻[11]使用神經網絡近似吸氣式高超聲速飛行器模型中的非線性未知項,然后使用反步法設計了飛行控制器,而且在控制器設計中引入附加系統來補償執行機構飽和對控制系統的影響。文獻[12]針對吸氣式高超聲速飛行器的非線性和不確定性設計了反步控制器,對飛行器模型的不確定項用干擾觀測器進行估計與補償。文獻[13]在反步控制器設計中,使用干擾觀測器對吸氣式高超聲速飛行器模型中的不匹配不確定性進行了補償。文獻[14]使用二階指令濾波器進行高超聲速飛行器的反步控制器設計,提高了控制系統對擾動的抑制能力。文獻[15]使用反步法設計了分布式魯棒控制器,通過將反步控制和信號補償結合起來構成一個魯棒控制器的方式,簡化了系統處理的復雜性。文獻[16]設計了吸氣式高超聲速飛行器的反步容錯控制器,對執行機構的時變故障進行了補償。
發動機進氣道不啟動現象是一個嚴重影響吸氣式高超聲速飛行器飛行安全的問題。進氣道不啟動是因為發動機燃燒室內壓力上升或者激波面與發動機隔離室分離而引起的[17-18]。當進氣道不啟動時會出現發動機推力驟減甚至發動機關機的現象。又因為吸氣式高超聲速飛行器發動機-機身一體化的獨特結構所造成的推力和氣動力的耦合,發動機推力驟減或消失后會在飛行器前部誘發抬頭附加力矩。誘發的抬頭力矩會改變飛行器的靜穩定性或加深飛行器的靜不穩定性,造成飛行器控制系統的失效[19]。因此,吸氣式高超聲速飛行器飛行時需要避免進氣道不啟動。文獻[20-21]表明,進氣道不啟動與飛行器的攻角有關。這就意味著在飛行過程中,對攻角的限制可有效的避免發動機的不啟動現象。基于通過限制攻角來避免進氣道不啟動的思想,Famularo等[22]在自適應控制器的基礎上,增加了狀態限制機制,當飛行器攻角超出邊界后,限制機制對控制器指令進行修正,實現對攻角的限制。許斌等[23]在反步法控制中引入輸入受限濾波器來限制攻角虛擬指令,并利用障礙Lyapunov函數約束攻角與虛擬指令之間的誤差,從而達到攻角限制的目的。郝安等[24]在控制吸氣式高超聲速飛行器時,讓飛行器跟蹤預設攻角指令,并用鴨翼補償飛行器攻角限制帶來的升力不足的方法保證攻角在允許范圍內運動。
針對高超聲速飛行器的攻角限制問題,本文使用反步法設計了吸氣式高超聲速飛行器的控制系統。并在反步法的基礎上增加了補償控制器。補償控制器在攻角超出預定閾值時對虛擬指令和參考值指令的修正以實現對攻角的限制作用。在以往使用反步法進行狀態限制方法中,反步法與障礙Lyapunov函數結合實現對狀態的約束作用[23,25-26]。這種方法在狀態接近障礙函數邊界時會產生較大的控制信號,而本文提出的使用補償控制器修正控制信號的方法,則避免了這一問題。另外,為了提高飛行器對外部擾動影響,例如風擾動,采用了擴展觀測器對外部擾動進行估計和補償。最后通過數值仿真計算,驗證了該控制方法的有效性。
1 高超聲速飛行器縱向動力學模型
高超聲速飛行器的縱向非線性動力學模型可表示成如下非線性微分方程組:
(1)
其中,狀態V、γ、α、ω分別為飛行器的速度、航跡傾角、攻角和俯仰角速度;m和I分別為飛行的質量和轉動慣量;g為重力常數;P、D、L、M分別為作用在飛行器上的推力、阻力、升力和俯仰力矩。根據文獻[27],飛行器的氣動力和力矩可表示為攻角α與舵偏δ的函數關系式:
(2)
其中,
(3)

飛行器運動時攻角比較小,所以sinα≈α。同時,忽略掉升降舵上的升力,高超聲速飛行器縱向姿態運動模型可以近似為嚴反饋形式:
(4)
其中,
(5)
(6)
嚴反饋模型中的d1、d2、d3是模型不確定性引起的擾動。模型的輸入是舵偏δ,輸出是航跡傾角γ。控制系統的設計目的是基于嚴反饋模型設計高超聲速飛行器的航跡傾角跟蹤控制器,并且控制器能保證飛行器在跟蹤航跡傾角的過程中攻角被限制在預定的范圍內。
2 控制系統設計
2.1 反步法控制器設計
(1)航跡傾角回路控制
定義航跡傾角控制誤差:
z1=γ-γd-λ1
(7)
式中γd為輸入的航跡傾角參考指令;λ1為對控制量的補償信號。
在傳統的反步控制其中,誤差的定義不含有補償信號。控制器驅動飛行器狀態γ跟蹤指令γd。當加入補償信號λ1后,在補償器工作時,控制器則驅動狀態γ跟蹤修正后的指令γd+λ1。對z1求導:
(8)
設計虛擬控制指令:
(9)
式中c1為一個正數。
(10)
其中,b11、b12、ε1、κ1為觀測器參數且均為正數,函數Γ(eγ,ε1,κ1)表示為
(11)
為了解決反步法控制器設計中“微分爆炸”,使用一階低通濾波器對虛擬指令進行估計。
(12)
式中η1為正數。
定義虛擬指令與估計指令的誤差:
y1=αd-αc
(13)
定義攻角控制誤差:
z2=α-αd-λ2
(14)
式中λ2為補償器輸出的補償信號。
把式(13)和(14)代入式(8),得:
(15)
把虛擬控制律式(9)代入式(15):
(16)
(2)攻角回路控制
對攻角控制誤差z2求導:
(17)
設計虛擬控制指令:
(18)

干擾觀測器為:
(19)
式中b21、b22、ε2、κ2均為正數。
讓虛擬控制指令ωc經過一階低通濾波器:
(20)
式中η2為正數。
定義虛擬指令與估計指令的誤差:
y2=ωd-ωc
(21)
定義俯仰角速度控制誤差:
z3=ω-ωd-λ3
(22)
把式(21)、式(22)代入式(17):
(23)
把虛擬控制律式(18)代入式(23):
(24)
(3)俯仰角回路控制
對俯仰角速度控制誤差求導:
(25)
選取控制律:
(26)

干擾觀測器為
(27)
式中b31、b32、ε3、κ3均為正數。
把控制控制律式(26)和式(27)代入式(25)得:
(28)
2.2 補償器設計
在反步法控制中,控制器驅動系統狀態跟蹤中間控制信號αd和ωd,當誤差信號收斂并穩定后,系統完成對參考指令的跟蹤。因此,系統的運動狀態主要由中間控制信號決定。當系統狀態超出限制范圍內,可通過對中間控制信號的修正完成對狀態的限制控制。基于這種思想,在上述的反步法控制中的每個誤差變量的定義中引入了相應的補償變量。當攻角超出限制邊界時利用補償器對中間控制信號的修正來實現對攻角的限制。而當攻角運行在允許范圍內,補償器不在起作用。控制器變成傳統的反步法控制器,保證控制系統對參考指令的跟蹤。補償器設計為
(29)
補償器輸入uλ為
(30)
式中k1、k2、k3、k4為補償器參數且均為正數;αmax與αmin分別為令補償器啟動的攻角最大閾值和最小閾值。
因為攻角在超出補償器啟動值后才會對控制信號進行修正。因此,補償器啟動的最大閾值要小于攻角限制的上邊界值,而最小閾值要大于攻角限制的下邊界。這樣設置閾值保證在動態響應過程中攻角不超出限制邊界。
3 穩定性分析
定義Lyapunov函數:
(31)

(32)
式(30)中的uλ根據攻角狀態值會有不同的表達形式。當αmin≤α≤αmax時,uλ=0,在這種情況下控制器變為傳統的反步法控制器。文獻[12]已分析了這種條件下控制系統的穩定性。當α>αmax時,uλ=αmax-α。此時,對式(13)和(14)進行變換并代入uλ,得:
uλ=αmax-z2-y1-αc-λ2
(33)
把式(33)代入式(32),并將括號展開:
(34)
考慮任意兩個緊集

Λ:=

則式(34)滿足:
(35)
對式(35)進行縮放:
(36)
整理式(36):
(37)
選取參數:
(38)

式(37)可進一步表示為
=-2m0Vγ+G
(39)
4 系統仿真與分析
通過數值仿真來驗證本文提出控制方法的有效性。仿真中使用式(1)描述的非線性模型。模型中的氣動力數據來自文獻[27]。文獻[27]并沒有給出發動機進氣道不啟動的攻角條件,但為了驗證控制器效果,假設在飛行器速度為8Ma時,引起進氣道不啟動的攻角邊界為[-5°,5°]。速度控制不在本文討論的范圍內,但為了保證控制系統的完整性,在仿真中使用文獻[12]提出的速度控制器來穩定飛行器速度。飛行器初始狀態由表1給出。
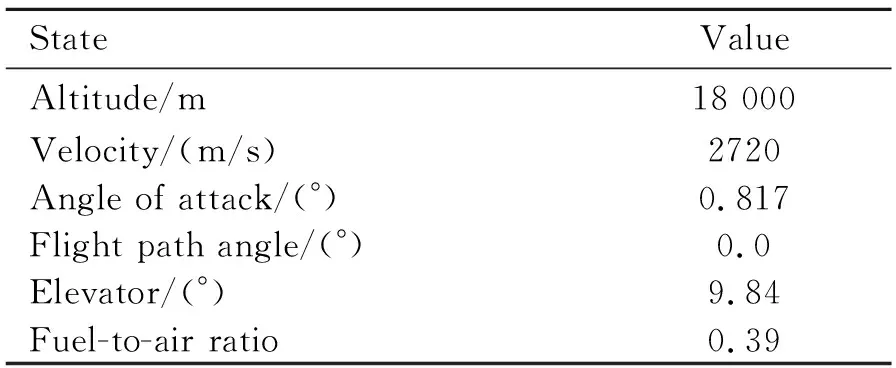
表1 飛行器初始狀態Table 1 Initial state values of the vehicle
仿真中,使用如下二階濾波器生成航跡傾角參考指令:
(40)
濾波器的阻尼比ζ為0.9。濾波器的輸入是幅值為10°的階躍信號。飛行器利用縱向氣動升力改變航跡傾角γ,而縱向升力主要由飛行器攻角提供。這就意味著過大或者過快的航跡傾角指令都會造成攻角超出限定邊界。因此,利用濾波器頻率ωn的變化來調節指令速率。在限定指令幅值的條件下,通過對不同速度率航跡傾角指令的跟蹤來說明控制器對攻角α的限制效果。另外,為了消除補償器延時和響應過程中信號超調的影響,補償器的閾值設定為4.7°和-4.7°。閾值范圍包含在氣道不啟動的攻角邊界內。同時在仿真中加入幅值為1°,頻率為0.05 rad的正弦風攻角來驗證控制系統對外界擾動的補償能力。
仿真中,使用不帶攻角限制補償器的控制方法和帶有攻角限制補償器的控制方法進行對比。圖1和圖2分別給出了兩種控制方法在不同ωn條件下航跡傾角響應曲線和攻角響應曲線。
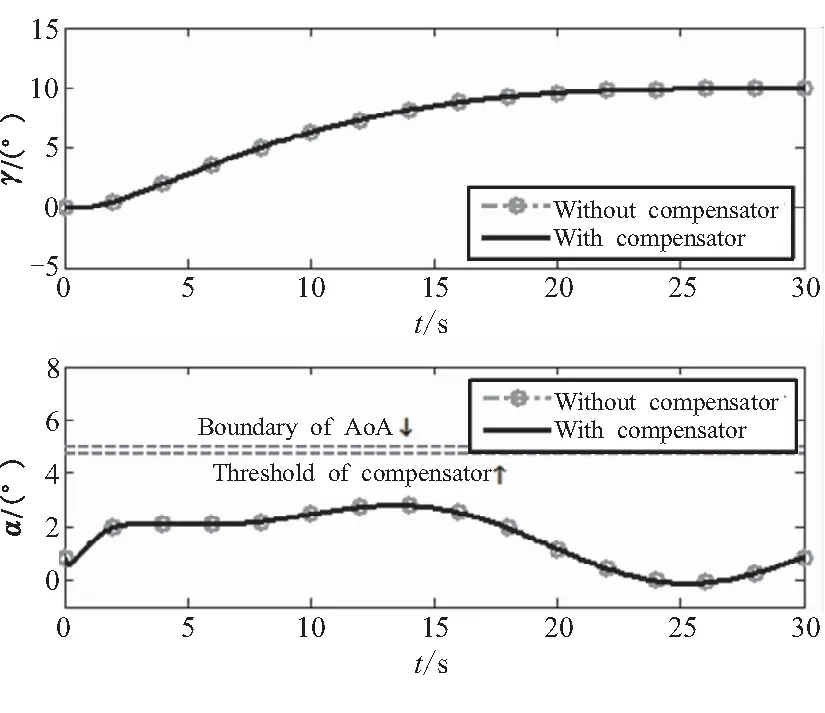
圖1 ωn=0.3時的航跡傾角和攻角響應Fig.1 Response of flight path angle and angle of attack when ωn=0.3
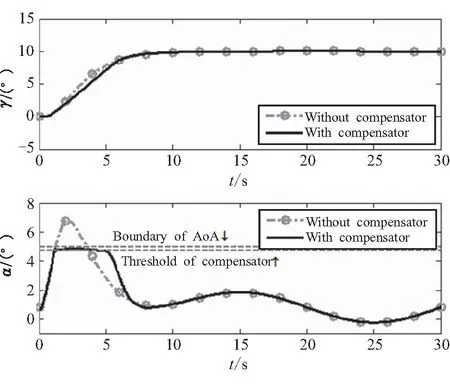
圖2 ωn=0.5時的航跡傾角和攻角響應Fig.2 Response of flight path angle and angle of attack when ωn=0.5
圖1的曲線是ωn=0.3時的仿真結果。在ωn=0.3時,兩種控制系統的航跡傾角響應和攻角響應完全重合。因為飛行器攻角沒有達到補償器閾值,所以在控制過程中,補償器并沒有被觸發。即在補償器不工作時,補償器對閉環控制系統不產生任何影響。圖2中的曲線是ωn=0.5時的仿真結果。在ωn=0.5時,兩種控制系統的航跡傾角響應在穩態時曲線重合和,即這兩種控制器的穩態特性相同。在航跡傾角響應的上升過程中,帶有攻角補償器的控制系統響應略慢于不帶補償器的控制系統響應。從攻角響應曲線上看,帶有補償器控制系統的攻角被限制在補償器閾值附近,且在攻角邊界之內。而不帶補償器控制系統的攻角響應則越過攻角邊界。因為補償器限制了攻角幅值,即限制了飛行器的縱向過載,所以帶有補償器控制系統的航跡傾角響應在上升過程中會略慢一些。圖1和圖2中,攻角α響應在穩態階段并沒有收斂到常值狀態,這是因為飛行器受到風攻角擾動后,飛行器需要通過改變攻角產生氣動力和力矩來抵消風攻角的擾動作用。
下面則以當ωn=0.5時帶有補償器控制方法的仿真結果說明補償器的工作機制以及控制系統中其他信號的特性。首先分析攻角控制回路。在攻角控制回路中,控制器驅動攻角跟蹤控制信號αd+λ2。當攻角在補償器閾值內時,補償器沒有輸出。而當攻角超出補償器閾值后,補償器產生信號修正信號αd。如圖3所示,在仿真進行到1.1 s左右時,飛行器攻角超出了補償器閾值,補償器產生信號λ2并且補償信號與αd符號相反。在信號λ2的修正下,控制信號αd幅值降低。控制器再驅動攻角跟蹤αd+λ2,攻角就被限制在補償器閾值附近。
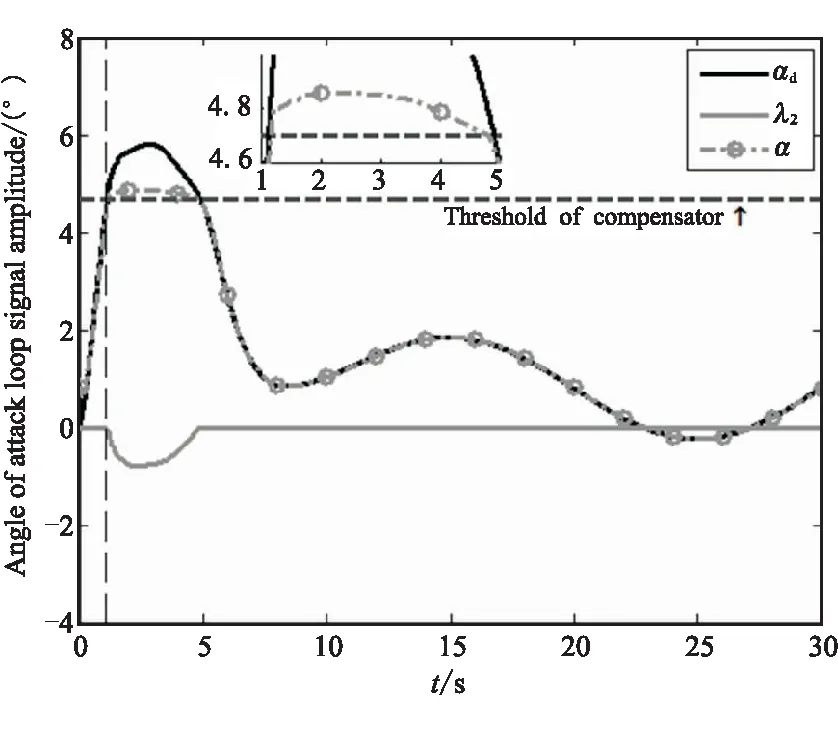
圖3 攻角回路控制信號αd和補償信號λ2Fig.3 Angle of attack loop the control signal αd and compensation signal λ2
這里需要指出的是,補償器在攻角超出閾值后才產生控制信號,補償信號可將攻角限制在補償器閾值附近,但無法避免攻角超出補償器閾值。因此,補償器閾值一定要小于期望的攻角邊界,且補償器閾值與攻角邊界之間保留一定裕度以保證攻角響應不會超出攻角邊界。同樣,補償器對γd和ωd也進行了修正,如圖4給出的仿真結果。圖5~圖7給出了當ωn=0.5時,其它變量的仿真結果。結果表明,這些變量都是有界量,與穩定性分析的結論一致。最后,圖7給出控制系統的控制量,其幅值也都在實際物理系統的允許范圍內。
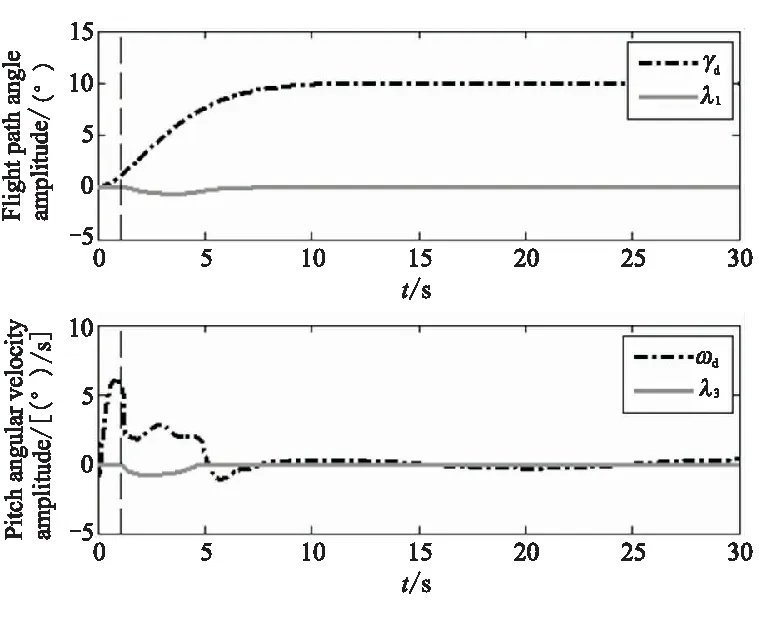
圖4 控制信號γd、ωd與補償信號λ1、λ3Fig.4 Control signals γd,ωd,and the compensation signals λ1,λ3
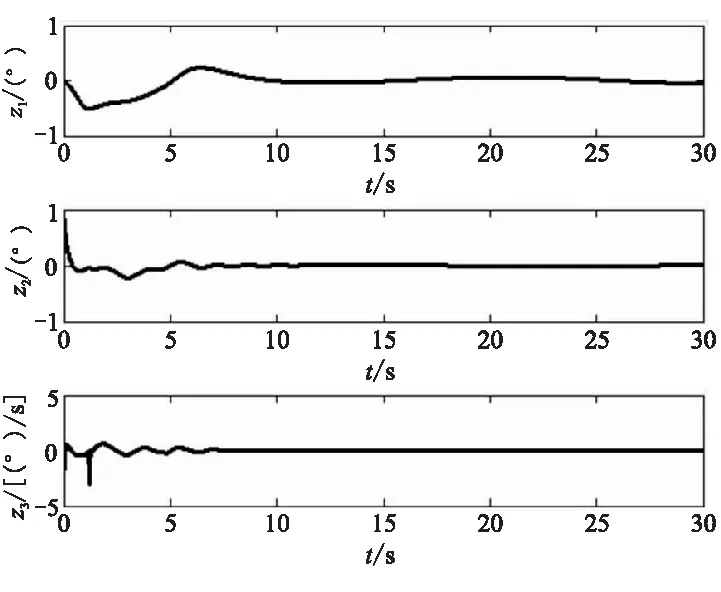
圖5 控制誤差Fig.5 Tracking errors
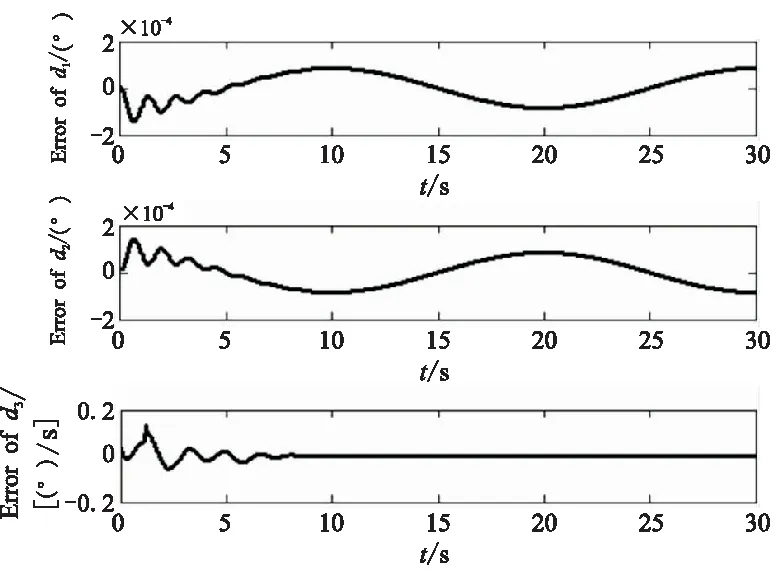
圖6 d1、d2和d3估計誤差Fig.6 Estimated error of d1,d2 and d3
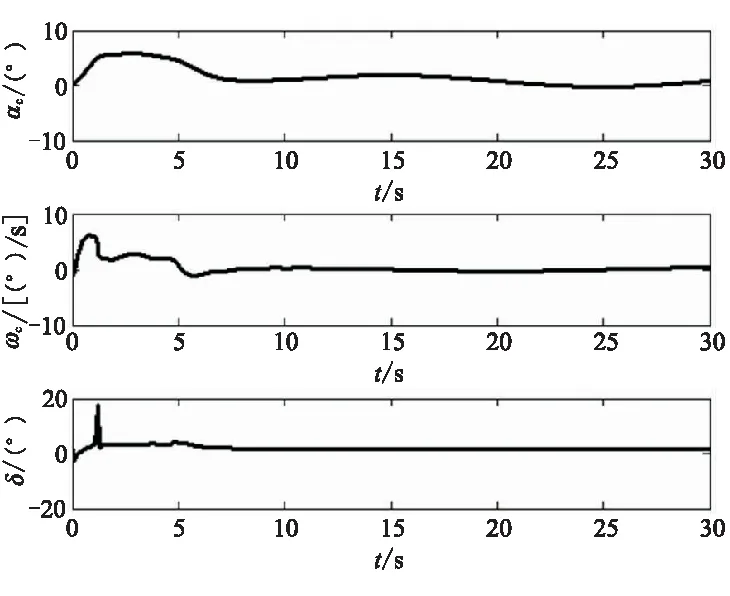
圖7 虛擬控制信號及舵偏Fig.7 Virtual controls and elevator
下面選取三組不同的補償器參數進行仿真實驗,通過實驗結果對比來說明補償器參數對閉環響應的影響。補償器參數的選取在表2中給出。這三組補償器參數的差別是k4選取了不同的數值。k4是補償器的輸入增益,體現了補償器對輸入信號的放大作用。
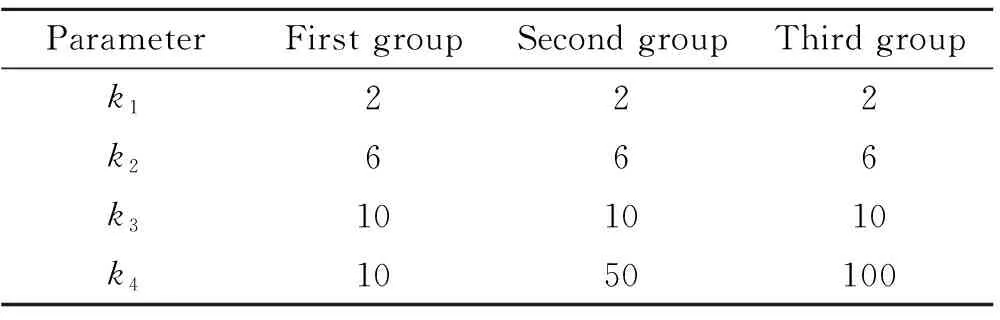
表2 補償器參數Table 2 Values of compensator parameters
圖8是k4取不同值時攻角的響應曲線。當k4=10時,補償器對攻角的限制作用并不明顯,攻角響應超出攻角邊界。當k4=50和k4=100時,補償器對攻角的限制作用明顯加強,攻角響應的幅值都被限制在攻角邊界以內,且k4增益越大,攻角響應越趨近于補償器閾值。這說明k4越大,補償器對攻角的限制作用越好。但k4越大對控制系統執行機構的性能要求越高。圖9仿真曲線則表明,隨著k4取值的不斷增大,舵響應的最大幅值隨之變大,且k4過大還會引起執行機構振動。圖9中,相比于與k4=50的情況,當k4=100時,在仿真時間1 s附近,舵響應出現了明顯的振動。
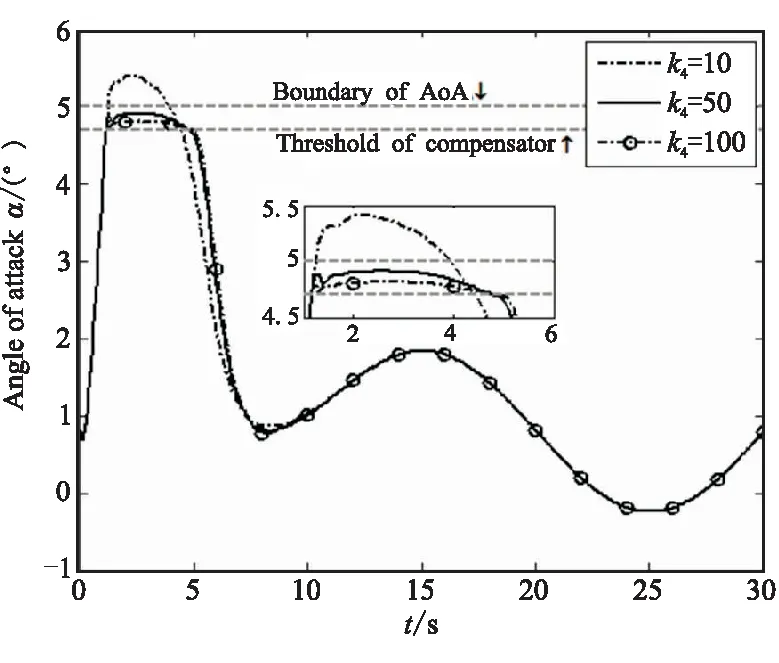
圖8 k4取不同值時的攻角響應Fig.8 Angle of attack response of k4 with different values
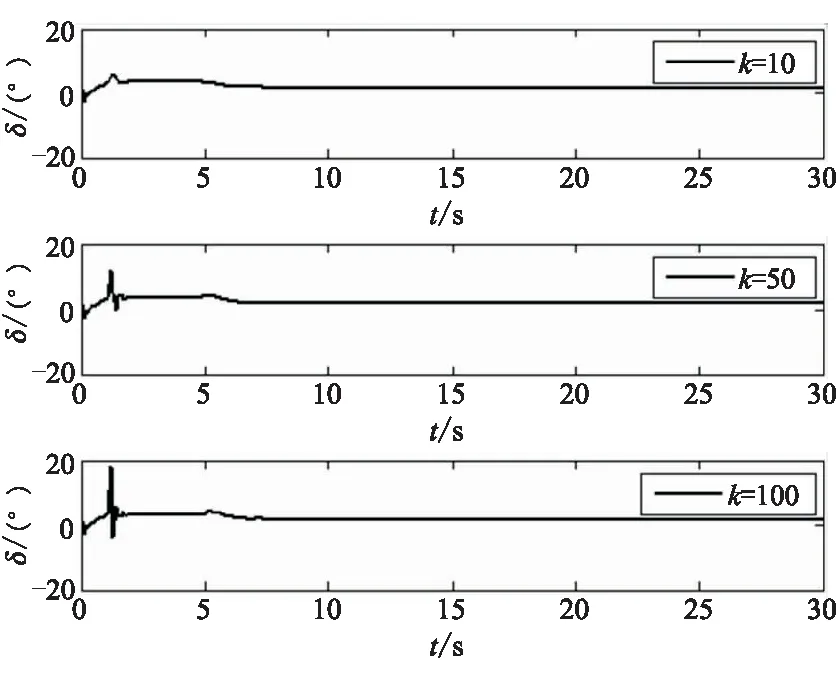
圖9 k4取不同值時的舵偏角Fig.9 Deflection of k4 with different values
5 結論
本文針對高超聲速飛行器飛行過程中攻角約束問題,提出了一種使用補償系統限制攻角運動范圍的控制方法,并從理論上分析了這種控制器設計方法的穩定性,結果表明:
(1)提出的補償器限制方法設計簡單,能有效控制攻角的運動范圍,并且不改變原有反步法控制器收斂精度;
(2)補償器在攻角超出閾值后,通過對指令的動態修正來實現攻角限制作用,相比于使用障礙Lyapunov函數設計反步法控制器,不需要對虛擬指令進行額外設計,便可達到對狀態限制的目的。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52