基于INet的雷達(dá)圖像雜波抑制和目標(biāo)檢測方法
2020-09-05 14:35:36牟效乾陳小龍劉寧波董云龍
雷達(dá)學(xué)報 2020年4期
牟效乾 陳小龍 關(guān) 鍵 周 偉 劉寧波 董云龍
(海軍航空大學(xué) 煙臺 264001)
1 引言
雷達(dá)海面動目標(biāo)檢測是雷達(dá)目標(biāo)檢測中的重要內(nèi)容[1],在海洋環(huán)境監(jiān)測、海上運輸航行以及國防安全等領(lǐng)域都有著重要的意義。可靠和穩(wěn)健的動目標(biāo)檢測技術(shù)的難點主要體現(xiàn)在目標(biāo)回波微弱、機(jī)動導(dǎo)致多普勒時變等。雷達(dá)在動目標(biāo)探測時不僅受到目標(biāo)機(jī)動特性的影響,還受雜波和噪聲等干擾,在實際的復(fù)雜背景下檢測難度大。其中,海雜波是海面目標(biāo)檢測的主要干擾源[2],一方面,海上目標(biāo)反射系數(shù)較小造成目標(biāo)回波信號微弱,回波信雜比(Signal-to-Clutter Ratio, SCR)較低,易造成漏檢[3],另一方面,高海況下產(chǎn)生的海尖峰是一種強(qiáng)海雜波,其幅值類似于目標(biāo)回波,易引起虛警;而且,由于風(fēng)力的影響,海雜波也有著一定的速度,其多普勒不為零,進(jìn)一步提升了海面慢速目標(biāo)檢測的難度[4]。
傳統(tǒng)的雷達(dá)動目標(biāo)檢測方法主要是通過時域、頻域、變換域的處理[5,6],改善SCR,實現(xiàn)目標(biāo)的可靠檢測。時域處理的經(jīng)典方法包括非相參積累以及恒虛警(Constant False-Alarm Rate, CFAR)檢測[7],然而此類方法多基于回波統(tǒng)計模型假設(shè),抗雜波能力和對環(huán)境的適應(yīng)能力不強(qiáng)。頻域處理經(jīng)典方法包括動目標(biāo)顯示(Moving Target Indicator, MTI)和動目標(biāo)檢測(Moving Target Detection, MTD)[8],通過傅里葉變換實現(xiàn)多普勒信息的提取,利用多普勒濾波器來區(qū)分運動目標(biāo)和雜波,但面對變速和機(jī)動目標(biāo),會產(chǎn)生頻譜發(fā)散,能量難以積累。分?jǐn)?shù)階傅里葉變換(FRactional Fourier Transform, FRFT)[9,10]是機(jī)動目標(biāo)檢測的典型方法,算法復(fù)雜度較低,卻需要進(jìn)行變換角度的搜索來匹配目標(biāo)的運動特性,難以實現(xiàn)快速目標(biāo)檢測任務(wù)。
針對傳統(tǒng)目標(biāo)檢測算法抗雜波能力差和泛化能力弱的現(xiàn)狀,新的研究思路和方法亟需被提出。近年來,深度學(xué)習(xí)方法得到了飛躍式發(fā)展,卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network, CNN)作為深度學(xué)習(xí)的重要組成部分,能夠自動學(xué)習(xí)和提取目標(biāo)的特征,實現(xiàn)對圖像目標(biāo)的智能檢測與分類等任務(wù)[11,12]。2012年以來,基于CNN的目標(biāo)檢測算法從RCNN到Faster R-CNN[13],從YOLO到Y(jié)OLOv3[14],YOLOv4[15]等,實現(xiàn)了重要的突破,在PASCAL VOC 2007數(shù)據(jù)集(包含20類目標(biāo))上的平均檢測準(zhǔn)確率從58.5%提升到了83.8%,為雷達(dá)目標(biāo)快速、穩(wěn)定、高精度檢測提供了新的途徑。將深度學(xué)習(xí)應(yīng)用于雷達(dá)圖像目標(biāo)檢測的新方法也不斷被提出[16,17]。蘇寧遠(yuǎn)等人[18]提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)的海面微動目標(biāo)檢測與分類方法,通過智能化特征提取回波信號時頻圖特征,實現(xiàn)微動目標(biāo)的檢測與分類;陳晨等人[19]提出了一種基于深度卷積網(wǎng)絡(luò)的多尺度SAR圖像船舶檢測方法;黃潔等人[20]提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)的遙感圖像艦船目標(biāo)檢測方法,將深度學(xué)習(xí)方法延伸到了SAR圖像以及遙感圖像的目標(biāo)檢測領(lǐng)域并且實現(xiàn)了較好的檢測性能提升。然而,上述方法大多是深度學(xué)習(xí)方法在高分辨遙感圖像和SAR圖像上的應(yīng)用,強(qiáng)海雜波背景下的目標(biāo)檢測首要問題就是海雜波抑制,但對于普通的中低分辨率雷達(dá)圖像尤其是對海雷達(dá)圖像目標(biāo)檢測研究較少。同時,考慮到圖像目標(biāo)實時檢測領(lǐng)域,YOLOv3作為基于卷積神經(jīng)網(wǎng)絡(luò)的檢測算法中實時性最好的方法,被廣泛地應(yīng)用于人臉識別、行人檢測等工程實踐中并取得了良好的效果[21—23]。然而,將其應(yīng)用于雷達(dá)的海面目標(biāo)檢測時雖然可以滿足實時性的需求,但存在著漏檢率高、虛警率高的“雙高”問題,海面小目標(biāo)的機(jī)動性和海雜波的干擾限制了其性能的進(jìn)一步提升。因此,對雜波的有效抑制、目標(biāo)檢測可靠的檢測性能以及算法的實時性是當(dāng)前雷達(dá)圖像目標(biāo)檢測領(lǐng)域需要解決的重要問題。
本文提出了一種基于雜波抑制和目標(biāo)檢測融合網(wǎng)絡(luò)(Integrated Network for clutter suppression and target detection)的導(dǎo)航雷達(dá)圖像雜波抑制和動目標(biāo)檢測方法。首先設(shè)計了雜波抑制和目標(biāo)檢測一體化融合網(wǎng)絡(luò)INet,包括網(wǎng)絡(luò)前端實施雜波抑制的雜波抑制網(wǎng)絡(luò)和網(wǎng)絡(luò)后端實施快速檢測的目標(biāo)檢測網(wǎng)絡(luò),建立了INet雷達(dá)圖像動目標(biāo)檢測模型,構(gòu)建了海面目標(biāo)數(shù)據(jù)集,將深度學(xué)習(xí)方法與雷達(dá)動目標(biāo)檢測在實踐上相結(jié)合,通過模型的預(yù)訓(xùn)練和平面位置顯示器(Plan Position Indicator, PPI)圖像的幀間積累對INet 進(jìn)行了進(jìn)一步的優(yōu)化,得到了最終的O-INet(Optimized INet)目標(biāo)檢測模型,經(jīng)過多種天氣條件下的海面目標(biāo)數(shù)據(jù)集的訓(xùn)練、測試和驗證證明了O-INet目標(biāo)檢測模型的優(yōu)越性能,實現(xiàn)了雷達(dá)運動目標(biāo)的實時高精度檢測。
2 雷達(dá)圖像雜波抑制和目標(biāo)檢測一體化模型(INet)
YOLOv3是一種具有良好檢測性能的深度學(xué)習(xí)目標(biāo)檢測算法,目前已廣泛地應(yīng)用到工程實踐領(lǐng)域,其包括darknet-53網(wǎng)絡(luò)、特征融合網(wǎng)絡(luò)、多尺度輸出網(wǎng)絡(luò)3部分,darknet-53網(wǎng)絡(luò)被用來提取目標(biāo)特征,特征融合網(wǎng)絡(luò)將darknet-53網(wǎng)絡(luò)輸出的不同尺度的特征進(jìn)行融合,最后,多尺度輸出網(wǎng)絡(luò)實現(xiàn)了最終的檢測和分類。而YOLOv4在YOLOv3的基礎(chǔ)上引入了CSPDarknet53, PANet, Cosine Annealing scheduler, Label Smoothing等改進(jìn)方法,提高了模型檢測的速度和精度。然而,將YOLOv3算法用于雷達(dá)圖像動目標(biāo)檢測時,雜波的干擾導(dǎo)致其存在漏檢率高、虛警率高的“雙高”問題,YOLOv4算法雖然提高了檢測概率和檢測速度,但是沒有在根本上解決雜波干擾問題,漏檢率和虛警率仍然較高。
為了提高海面目標(biāo)檢測的準(zhǔn)確率和降低虛警率,增強(qiáng)算法的泛化能力,本文設(shè)計了雜波抑制和目標(biāo)檢測一體化融合網(wǎng)絡(luò)INet,基于INet網(wǎng)絡(luò)和YOLOv3的損失函數(shù),同時引入了YOLOv4算法的數(shù)據(jù)增強(qiáng)方法Mosaic和交并比(Intersection Over Union, IOU)計算方法Ciou,構(gòu)建了目標(biāo)檢測模型,如圖1所示。主要創(chuàng)新在于:第1,在目標(biāo)檢測網(wǎng)絡(luò)前端加入了雜波抑制網(wǎng)絡(luò),實現(xiàn)了雜波抑制和目標(biāo)檢測網(wǎng)絡(luò)的融合和功能的一體;第2,提出了一種層歸一化-傳遞和連接(Layer Normalization-Transfer and Connection, LN-TC)方法,用來提取圖像中的關(guān)鍵目標(biāo)特征并進(jìn)行編碼傳輸和解碼,實現(xiàn)雜波抑制的同時保證目標(biāo)的完整;第3,提出了一種注意力殘差網(wǎng)絡(luò)(Attention Residual Network,ARN),實現(xiàn)海雜波的抑制和海面目標(biāo)的增強(qiáng);第4,提出了一種跨階段局部殘差網(wǎng)絡(luò)模塊(Cross Stage Partial Residual Module, CSPRM),保證檢測網(wǎng)絡(luò)的輕量化和準(zhǔn)確性。
PartⅠ:雜波抑制部分。提出用于關(guān)鍵特征提取和增強(qiáng)的層歸一化-傳遞和連接方法LN-TC和一種新型的注意力殘差網(wǎng)絡(luò)模塊(Residual Attention Network, ARN),LN-TC模塊和ARN模塊是雜波抑制的核心。
(1) LN-TC。提取圖像中的關(guān)鍵目標(biāo)信息,并加以增強(qiáng),保證在完成海雜波抑制任務(wù)的同時使海面目標(biāo)得以完整保留,同時可以減少對于數(shù)據(jù)集樣本數(shù)量的依賴,實現(xiàn)小樣本的高效生成對抗訓(xùn)練。
(a) LN層歸一化[24]是一種經(jīng)典的歸一化方法,在通道方向?qū)νǖ馈埩康拈L、寬進(jìn)行歸一化,與Batch Normalization相比在小批量、少樣本的矩信息提取方面有著極大的優(yōu)勢,其公式為

其中, μn為 第n層特征矩陣的均值, σn為第n層特征矩陣的標(biāo)準(zhǔn)差, H 為該層的神經(jīng)元數(shù)量, xni為該層第i個輸入的神經(jīng)元,ε 為一常數(shù),防止 σb,h,w為0。
(b) TC傳遞和連接把提取的矩信息 μ , σ與后續(xù)的網(wǎng)絡(luò)層進(jìn)行跳變連接,對在LN中被歸一化的特征進(jìn)行解碼和增強(qiáng)。
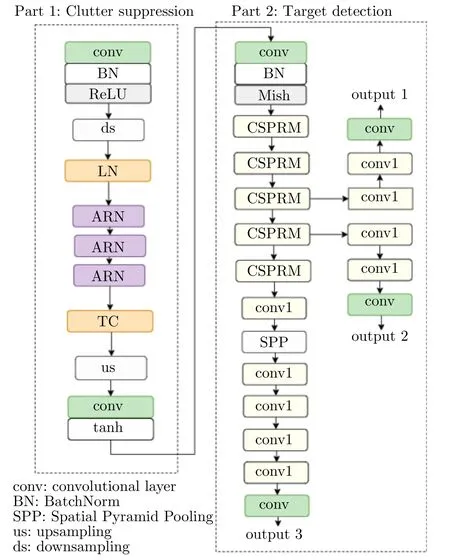
圖 1 INet網(wǎng)絡(luò)結(jié)構(gòu)Fig. 1 The network structure of INet

其中, Y 為輸出的新特征張量, x為輸入的特征張量, μ , σ 分 別為 μn和 σn的 集合, γ , β分別為層歸一化中提取的方差和均值, f (·)為整個ARN模塊的函數(shù)表示。
(2) ARN。由3個注意力子網(wǎng)絡(luò)以及殘差連接組成,具體結(jié)構(gòu)詳見圖2,包括注意力網(wǎng)絡(luò)0(Attention Network 0, AN 0)、注意力網(wǎng)絡(luò)Ⅰ(Attention Network Ⅰ, ANⅠ)、注意力網(wǎng)絡(luò)Ⅱ(Attention Network Ⅱ, ANⅡ)3部分組成。殘差連接能夠通過學(xué)習(xí)殘差函數(shù)來構(gòu)造一個新的恒等映射,提高神經(jīng)網(wǎng)絡(luò)的特征提取效率和特征信息的完整性。注意力網(wǎng)絡(luò)可以通過訓(xùn)練實現(xiàn)模型權(quán)重的合理分配,關(guān)注圖像和特征張量中的重點信息,忽略和少關(guān)注不重要的信息,而在海雜波圖像中,海面目標(biāo)是重要信息,海雜波是可以忽略的無關(guān)信息。ARN的公式為
其中, F0=f0(Featureold) , F1=f1(F0) ,F2=f2(F0·F1), F eatureold表示輸入基本模塊的特征,F(xiàn)eaturenew表示ARN網(wǎng)絡(luò)處理后輸出的新特征,f0(·)表 示注意力網(wǎng)絡(luò)0的函數(shù), f1(·)表示注意力網(wǎng)絡(luò)Ⅰ的函數(shù), f2(·)表示注意力網(wǎng)絡(luò)Ⅱ的函數(shù)。
Part Ⅱ:目標(biāo)檢測部分。提出一種用于特征的快速提取和傳輸?shù)目珉A段局部殘差網(wǎng)絡(luò)CSPRM,CSPRM和多尺度輸出是目標(biāo)檢測網(wǎng)絡(luò)的核心。
(1) CSPRM。基于CSPnet[25]和Resnet[26]網(wǎng)絡(luò)構(gòu)建的新的網(wǎng)絡(luò)模塊,CSPNet能夠把提取的特征通過兩條通道繼續(xù)向下傳播:一條通道經(jīng)過中間層向下傳輸,另一條通道將與傳輸?shù)奶卣骱喜⒗^續(xù)向下傳輸。該網(wǎng)絡(luò)結(jié)構(gòu)可以增強(qiáng)特征提取能力的同時減少網(wǎng)絡(luò)參數(shù),大大減少顯存的資源占用,在保證良好的特征提取性能的同時提高網(wǎng)絡(luò)的訓(xùn)練和測試速度,Resnet網(wǎng)絡(luò)的殘差連接能夠增強(qiáng)特征提取的完整性,減少梯度消失的可能。CSPRM能夠使網(wǎng)絡(luò)輕量化的同時不影響特征提取性能,其具體結(jié)構(gòu)如圖3所示。
(2) 多尺度輸出。沿用了YOLOv3的3個尺度的輸出,即圖1中的output 1, output 2, output 3,通過大、中、小3個尺度的設(shè)計,實現(xiàn)目標(biāo)的多尺度檢測,增強(qiáng)對不同尺度目標(biāo)的檢測能力。而與YOLOv3, YOLOv4不同的是,該多尺度輸出部分特征輸出之前沒有進(jìn)行特征融合,一方面是為了減少網(wǎng)絡(luò)參數(shù),使網(wǎng)絡(luò)輕量化,另一方面是經(jīng)過INet前端的雜波抑制和特征增強(qiáng),以及I N e t 后端CSPRM模塊的特征傳輸,特征已得到了較好的提取和傳輸。
INet的目標(biāo)檢測算法包括兩個階段:離線訓(xùn)練階段和測試階段,如圖4所示。離線訓(xùn)練階段流程如下:
(1) 數(shù)據(jù)采集。使用導(dǎo)航雷達(dá)發(fā)射長脈沖和短脈沖采集不同條件下(不同天氣、不同海況)的雷達(dá)回波數(shù)據(jù),以保證采集的數(shù)據(jù)樣本的多樣性。同時,選擇并采集復(fù)雜樣本(不容易被檢測的樣本),以提高數(shù)據(jù)集在不同情況下的泛化能力。

圖 2 ARN網(wǎng)絡(luò)結(jié)構(gòu)Fig. 2 The network structure of ARN
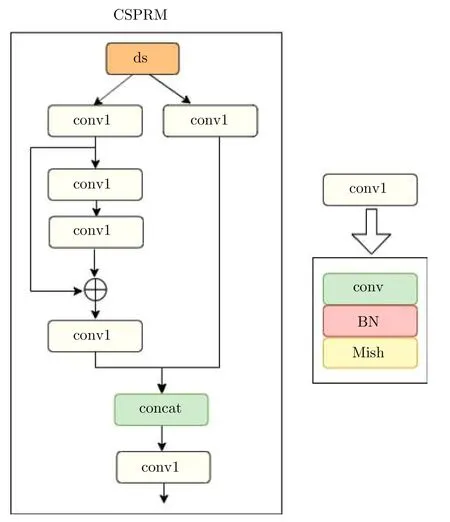
圖 3 CSPRM結(jié)構(gòu)Fig. 3 The network structure of CSPRM
(2) 數(shù)據(jù)轉(zhuǎn)換。將回波數(shù)據(jù)轉(zhuǎn)換成PPI圖像。
(3) 海面目標(biāo)數(shù)據(jù)集的構(gòu)建。對PPI圖像進(jìn)行裁剪,將PPI圖像中的艦船目標(biāo)標(biāo)注添加標(biāo)簽,構(gòu)建海面目標(biāo)數(shù)據(jù)集。
(4) INet目標(biāo)檢測模型的建立。設(shè)計雜波抑制和目標(biāo)檢測融合網(wǎng)絡(luò)INet,建立INet目標(biāo)檢測模型。
(5) 模型的訓(xùn)練和優(yōu)化。將海面目標(biāo)數(shù)據(jù)集輸入到INet模型進(jìn)行迭代訓(xùn)練,調(diào)整模型的初始訓(xùn)練參數(shù)對模型進(jìn)行調(diào)整和優(yōu)化。
(6) 最優(yōu)目標(biāo)檢測模型的獲得。選取損失函數(shù)值loss<1的訓(xùn)練模型,使用海面目標(biāo)數(shù)據(jù)集對模型進(jìn)行測試,選取檢測概率達(dá)到90%以上的模型作為最優(yōu)目標(biāo)檢測模型。
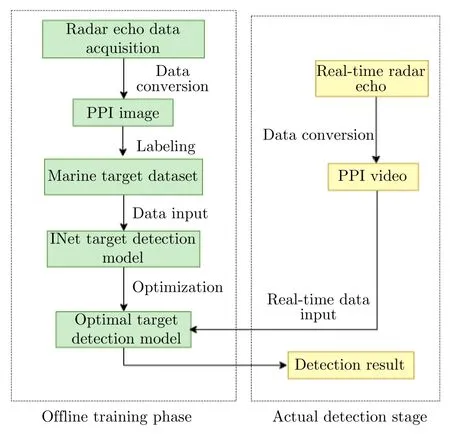
圖 4 基于INet的目標(biāo)檢測算法流程圖Fig. 4 Flowchart of target detection algorithm based on INet
實際檢測階段流程如下:
(7) 數(shù)據(jù)采集。使用導(dǎo)航雷達(dá)采集實時的方位-距離回波數(shù)據(jù)。
(8) 數(shù)據(jù)處理。將實時回波數(shù)據(jù)實時轉(zhuǎn)換為PPI視頻流。
(9) 將實時PPI視頻流輸入最優(yōu)目標(biāo)檢測模型,進(jìn)行實時的動目標(biāo)檢測,并得到目標(biāo)檢測結(jié)果。
3 對海雷達(dá)圖像數(shù)據(jù)集的構(gòu)建
3.1 數(shù)據(jù)的采集
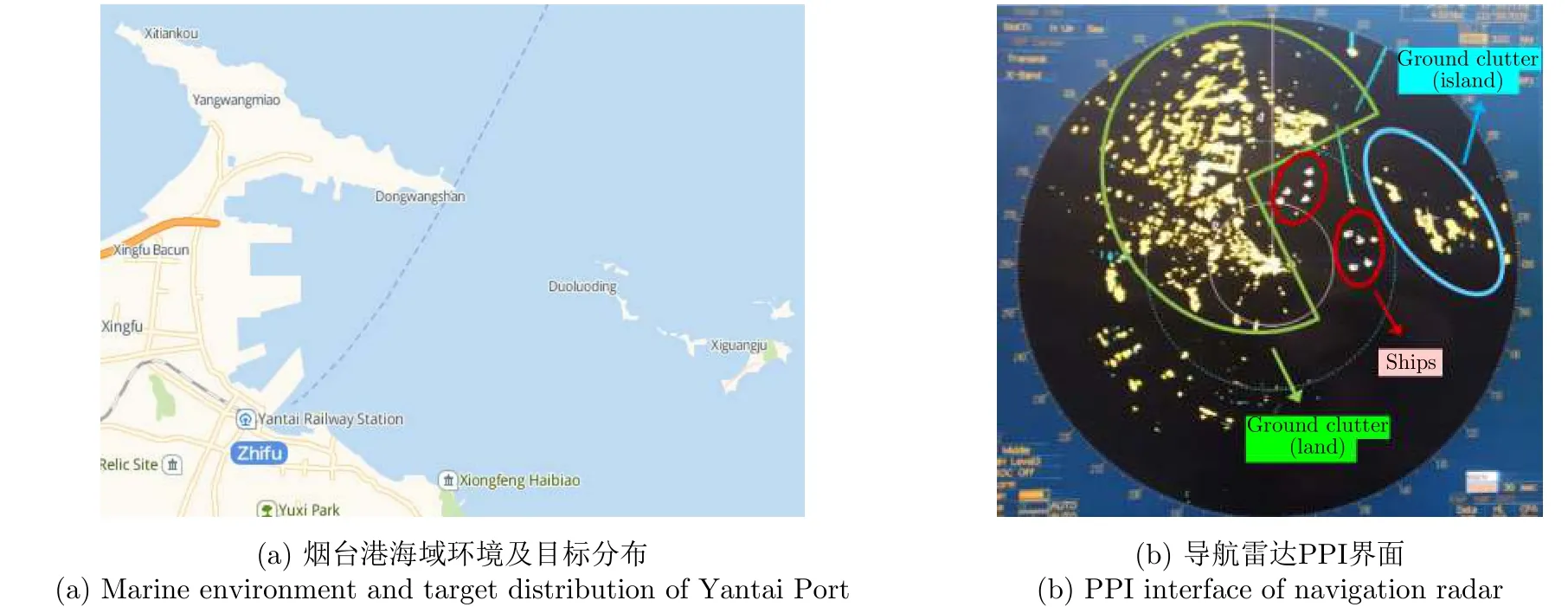
圖 5 探測環(huán)境及雷達(dá)PPI界面Fig. 5 Detection environment and radar PPI interface
在1級、2級、3級和4級海況下,利用X波段非相參脈沖體制導(dǎo)航雷達(dá),在煙臺港附近進(jìn)行數(shù)據(jù)采集實驗,得到不同海況和天氣下民用船只的雷達(dá)回波數(shù)據(jù),如圖5所示。JMA-5312導(dǎo)航雷達(dá)量程0.125~48 n mile,發(fā)射功率10 kW,轉(zhuǎn)速24 rpm,雷達(dá)天線距離海平面高度約為80 m。該海域海上目標(biāo)眾多,為數(shù)據(jù)的采集提供了便利。此外,船舶自動識別系統(tǒng)(Automatic Identification System,AIS)設(shè)備得到船只的位置信息可作為目標(biāo)檢測結(jié)果的驗證。設(shè)置采樣頻率、采集方位、存儲路徑等參數(shù),進(jìn)行數(shù)據(jù)采集和信息記錄。圖5(b)為雷達(dá)原始PPI界面,包括陸地、島嶼、港口、船舶等。
3.2 數(shù)據(jù)預(yù)處理
(1) 圖像的生成:使用Matlab將PCI采集卡采集到的DAT格式原始數(shù)據(jù)轉(zhuǎn)換生成PPI圖像。
(2) 圖像的裁剪:由于PPI圖像較大而且部分區(qū)域沒有目標(biāo),使用完整的PPI圖像訓(xùn)練會占用過高的顯存和耗費過長的時間,因此需要對原始PPI圖像進(jìn)行裁剪處理。從圖5(b)中可以看出,海面目標(biāo)主要位于PPI圖像的上半部分,因此裁剪完整PPI圖像的1/4并基于此構(gòu)建數(shù)據(jù)集。
(3) 圖像的標(biāo)注及數(shù)據(jù)集的構(gòu)建:使用標(biāo)注精靈軟件標(biāo)注數(shù)據(jù)集圖像, 生成Pascal VOC格式的標(biāo)注文件;構(gòu)建的數(shù)據(jù)集中訓(xùn)練數(shù)據(jù)集包含1600張圖像,測試數(shù)據(jù)集包含400張圖像。
3.3 驗證數(shù)據(jù)集
利用測試集對模型測試得到最優(yōu)模型后,需要進(jìn)一步對其對于動目標(biāo)的檢測性能進(jìn)行驗證,這里需要用到實時驗證數(shù)據(jù)集。驗證數(shù)據(jù)集來源于實時的實測回波數(shù)據(jù)生成的實時PPI視頻,而為了提高模型的檢測速度,將雷達(dá)回波數(shù)據(jù)實時生成灰度PPI圖像。本文選用了五類不同類型(低海況簡單背景Data_01#、低海況復(fù)雜背景Data_02#、高海況下的多目標(biāo)Data_03#、大雪Data_04#和中雨Data_05#)的實時回波數(shù)據(jù)對模型進(jìn)行驗證,5類數(shù)據(jù)的具體參數(shù)如表1所示。

表 1 實時驗證數(shù)據(jù)集參數(shù)Tab. 1 Parameters of real-time verification dataset
4 模型訓(xùn)練及實驗結(jié)果分析評價
4.1 INet的訓(xùn)練和測試
計算機(jī)配置如下:Intel? CoreTMi7-8700K處理器,16 G內(nèi)存,Ge Force GTX 1050Ti顯卡,顯存為6 G。系統(tǒng)環(huán)境是Windows,框架是Pytorch。實驗的參數(shù)設(shè)置如下:梯度下降算法為Adam算法,anchor數(shù)目設(shè)置為9類,目標(biāo)類別設(shè)置為1類(ship),初始學(xué)習(xí)率設(shè)置為0.001,學(xué)習(xí)率衰減方式設(shè)置為“step”,epoch設(shè)置為100。輸入海面目標(biāo)數(shù)據(jù)集到INet目標(biāo)檢測模型中后,經(jīng)過190.87 min的迭代訓(xùn)練,在96 epoch時得到了最優(yōu)INet目標(biāo)檢測模型,其測試結(jié)果見表2。
其中,表2中的Recall, FA對應(yīng)于傳統(tǒng)目標(biāo)檢測中的檢測概率和虛警率,其公式為
其中,R為Recall,表示召回率,P為Precision,表示精確度,F(xiàn)A為虛警率,F(xiàn)P(False Positive)表示負(fù)樣本的模型預(yù)測結(jié)果為正,TP(True Positive)表示正樣本的模型預(yù)測結(jié)果為負(fù),F(xiàn)N(False Negative)表示負(fù)樣本的模型預(yù)測結(jié)果為負(fù)。

表 2 測試結(jié)果Tab. 2 Test result
為了檢驗雜波抑制網(wǎng)絡(luò)的雜波抑制效果,本文以1幀包含3個運動民船目標(biāo)的圖像輸入到INet網(wǎng)絡(luò)的Part Ⅰ雜波抑制網(wǎng)絡(luò)中,選取了兩種具有代表性的特征圖進(jìn)行輸出展示:第1個卷積層輸出的特征圖、最后一層輸出的特征圖,如圖6所示,通過對比證明了INet網(wǎng)絡(luò)的Part Ⅰ雜波抑制網(wǎng)絡(luò)具有良好的雜波抑制能力。
4.2 INet目標(biāo)檢測模型的優(yōu)化(幀間積累和預(yù)訓(xùn)練)
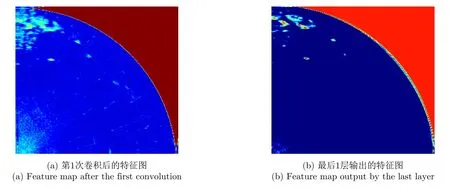
圖 6 Part Ⅰ 雜波抑制網(wǎng)絡(luò)的部分特征圖Fig. 6 Feature maps of the clutter suppression network in Part Ⅰ
INet目標(biāo)檢測模型可以通過預(yù)訓(xùn)練的方式進(jìn)一步改善檢測能力,預(yù)訓(xùn)練是指先對模型進(jìn)行訓(xùn)練,將測試后得到的最優(yōu)模型的網(wǎng)絡(luò)參數(shù)作為真正訓(xùn)練時網(wǎng)絡(luò)的初始參數(shù),基于預(yù)訓(xùn)練網(wǎng)絡(luò)再進(jìn)行一次模型的訓(xùn)練,達(dá)到進(jìn)一步優(yōu)化網(wǎng)絡(luò)模型參數(shù)和提高模型訓(xùn)練效果的目的。同時,地雜波和海雜波是引起虛警率高的主要原因,雖然INet前端的雜波抑制網(wǎng)絡(luò)能夠起到抑制雜波的功能,但是可以通過非相參積累的方式實現(xiàn)雜波的進(jìn)一步抑制。本文借鑒非相參積累的思路,在實時PPI輸入INet目標(biāo)檢測模型之前,將天線掃描R個周期(幀)下的PPI圖像進(jìn)行累加并取平均,實現(xiàn)檢測前PPI圖像的多幀積累,從而實現(xiàn)增強(qiáng)目標(biāo),進(jìn)一步抑制海雜波的目的。其中, Qr是第r個天線掃描周期去海雜波后的圖像,Q為R個掃描周期PPI圖像在累加取平均后的結(jié)果,R值可根據(jù)對整個流程檢測速度的要求進(jìn)行調(diào)整。

對INet目標(biāo)檢測模型進(jìn)行預(yù)訓(xùn)練和幀間積累的優(yōu)化結(jié)果見表3。從表3中可以看出,經(jīng)過INet目標(biāo)檢測模型的預(yù)訓(xùn)練和幀間積累,漏檢率和虛警率得到了進(jìn)一步的降低,檢測概率Recall提升了1.61%,達(dá)到了92.73%,虛警率由1.12%降低到了0.33%,降低了一個數(shù)量級,INet目標(biāo)檢測模型實現(xiàn)了良好的優(yōu)化,得到了最終的O-INet(Optimized INet)目標(biāo)檢測模型。
預(yù)訓(xùn)練和幀間積累對于INet目標(biāo)檢測模型性能提升的驗證效果見圖7。可以看出,對于高海況下的多目標(biāo)的檢測,INet目標(biāo)檢測模型經(jīng)過預(yù)訓(xùn)練后仍然存在漏檢,而經(jīng)過模型的預(yù)訓(xùn)練和幀間積累,實現(xiàn)了對模型的進(jìn)一步優(yōu)化,避免了漏檢。
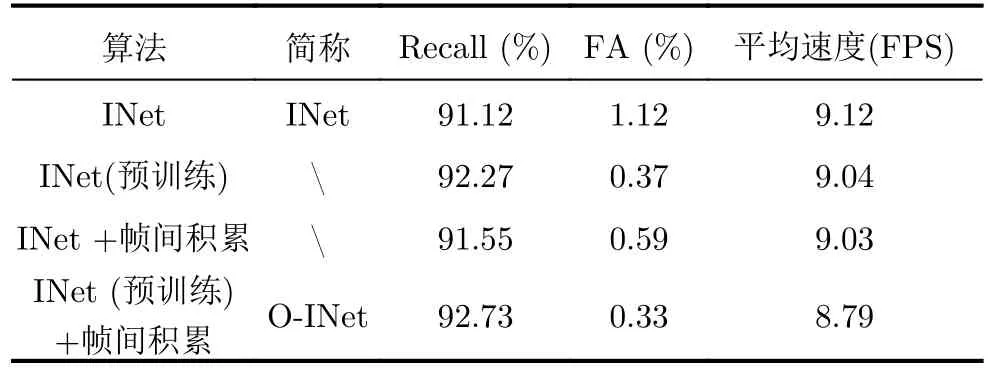
表 3 INet模型優(yōu)化結(jié)果對比Tab. 3 Comparison of optimization results
4.3 O-INet目標(biāo)檢測模型的檢驗
為了檢驗O-INet目標(biāo)檢測模型對于復(fù)雜背景下目標(biāo)檢測的能力,分別利用數(shù)據(jù)Data_01#~Data_05# 5類數(shù)據(jù)驗證算法:低海況簡單背景下動目標(biāo)檢測、低海況復(fù)雜背景下動目標(biāo)檢測(含弱小目標(biāo))、高海況下多目標(biāo)檢測、大雪多目標(biāo)檢測、中雨目標(biāo)檢測。測試結(jié)果詳見圖8—圖12。圖8中目標(biāo)周圍無干擾物,證明了O-INet算法對于機(jī)動目標(biāo)有著良好的檢測能力;圖9中動目標(biāo)周圍是地雜波,包括陸地和港口,證明了O-INet算法對于復(fù)雜背景和弱小目標(biāo)具有較好的檢測能力;圖10中目標(biāo)數(shù)量為9個,證明了O-INet算法高海況下多目標(biāo)的檢測能力,在圖10中給出了顯示檢測結(jié)果的類別標(biāo)簽和評分標(biāo)簽以及不顯示相關(guān)標(biāo)簽的檢測結(jié)果圖,給出檢測結(jié)果標(biāo)簽會在一定程度上影響算法的速度;圖11證明了O-INet算法的整體檢測性能較好,然而個別目標(biāo)受強(qiáng)雪和海浪雜波影響,產(chǎn)生了漏檢;圖12表明雨雜波和多徑散射對于檢測的穩(wěn)定性有一定的干擾,檢測時偶爾會產(chǎn)生虛警(驗證數(shù)據(jù)中的多徑散射是由于雷達(dá)天線架設(shè)處的建筑物遮擋產(chǎn)生的干擾,在實際檢測的情況下可以通過屏蔽進(jìn)行抑制)。
4.4 與YOLOv3, YOLOv4算法的對比
比較YOLOv3, YOLOv4和INet系列的檢測性能。在實驗中,采用構(gòu)建的不同天氣條件下海面目標(biāo)數(shù)據(jù)集對模型進(jìn)行訓(xùn)練和測試,測試實驗結(jié)果如表4,圖13—圖17所示。結(jié)果表明,所提的O-INet的性能優(yōu)于YOLOv3, YOLOv4算法,具有更高的準(zhǔn)確率和更低的虛警率,適合復(fù)雜背景下導(dǎo)航雷達(dá)海面目標(biāo)檢測。YOLOv4算法雖然檢測速度相較于O-INet目標(biāo)檢測算法更快,但是對于海面弱小目標(biāo)的檢測能力較弱,同時對于復(fù)雜背景和雨雪天氣下的動目標(biāo)檢測時容易產(chǎn)生虛警,而O-INet能夠較好地改善弱小目標(biāo)的漏檢和復(fù)雜環(huán)境的虛警問題,具有更強(qiáng)的泛化能力。
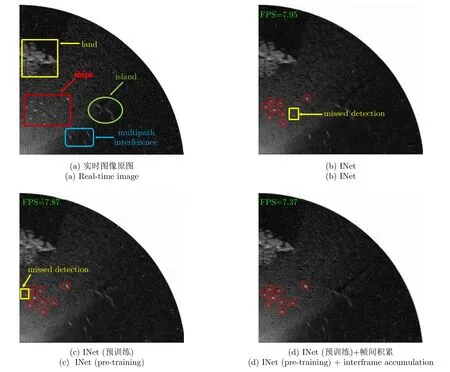
圖 7 模型優(yōu)化前后的對比(Data_03#)Fig. 7 Comparison before and after model optimization (Data_03#)
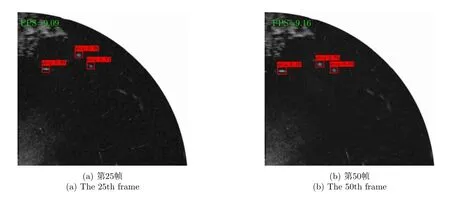
圖 8 低海況簡單背景下的動目標(biāo)(Data_01#)檢測Fig. 8 Moving target detection under simple background of low sea state (Data_01#)
4.5 與CFAR算法的對比
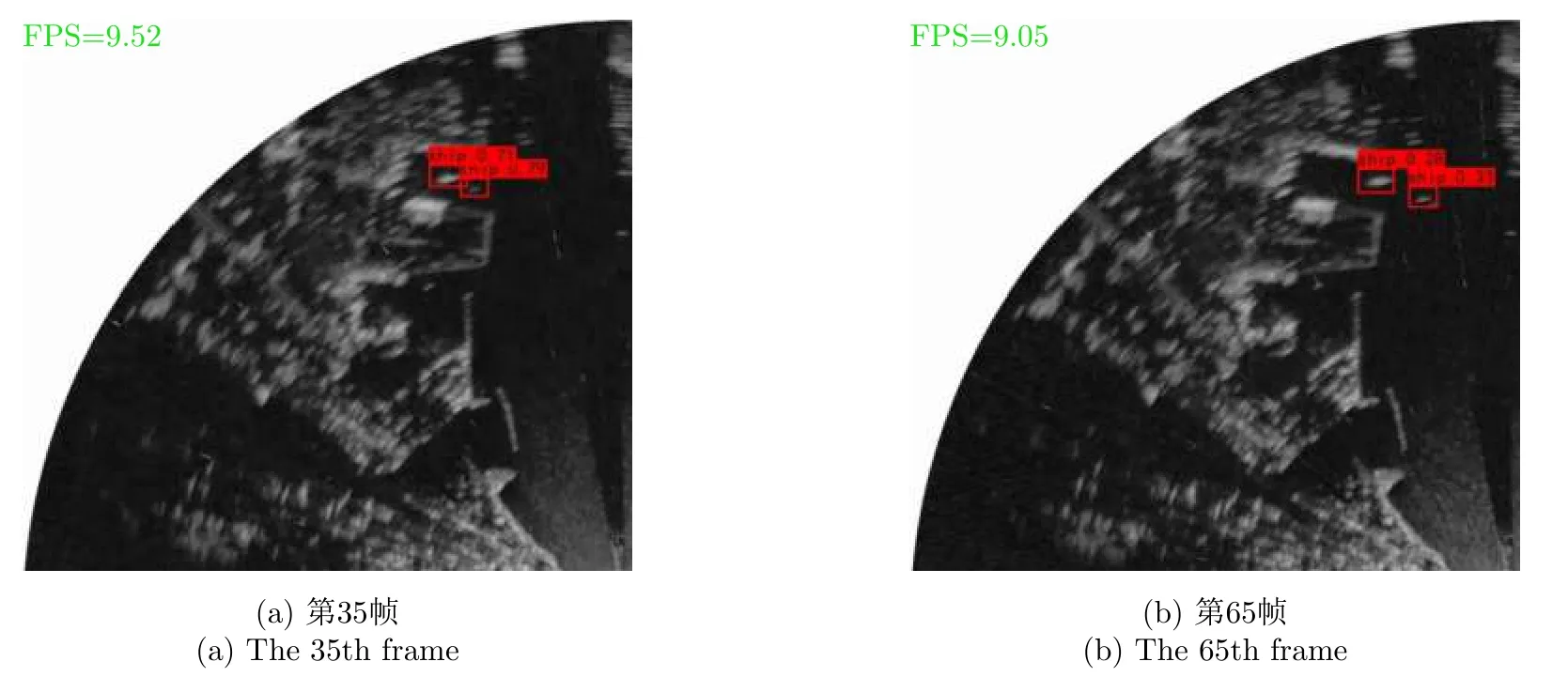
圖 9 低海況復(fù)雜背景下的動目標(biāo)(Data_02#)檢測Fig. 9 Moving target detection under complex background of low sea state (Data_02#)
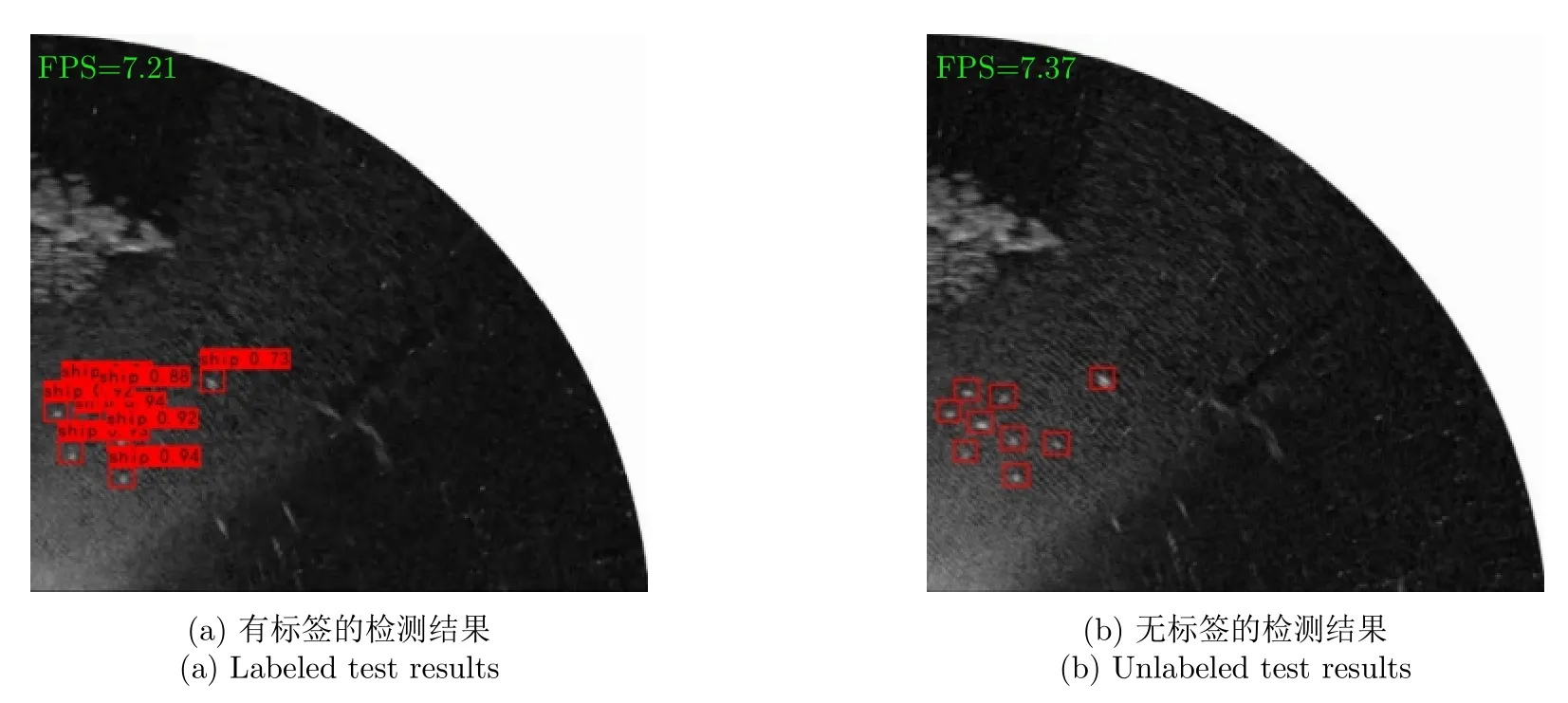
圖 10 高海況下的多目標(biāo)(Data_03#)檢測Fig. 10 Multi-target detection under high sea conditions (Data_03#)
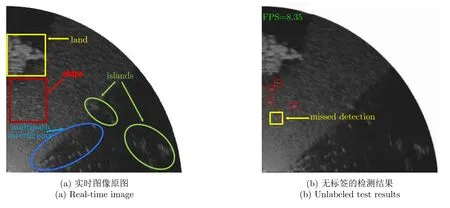
圖 11 大雪下的多目標(biāo)(Data_04#)檢測Fig. 11 Multi-target detection under heavy snow (Data_04#)
本文將所提方法與統(tǒng)計類目標(biāo)檢測方法進(jìn)行對比,即雙參數(shù)CFAR[27]檢測方法和經(jīng)典的二維單元平均CFAR (Cell Averaging CFAR, CA-CFAR)[28]方法。使用Data_01#, Data_02#, Data_03#,3類驗證數(shù)據(jù)進(jìn)行驗證。二維CA-CFAR中檢測單元上、下、左、右的參考單元數(shù)量設(shè)置為20,檢測單元上、下、左、右的保護(hù)單元數(shù)量設(shè)置為2,雙參數(shù)CFAR中目標(biāo)窗口長寬為25,保護(hù)窗口長寬為30,參考窗口長寬為 60。分別選取虛警率為10—4,10—3, 10—2的兩種方法(非相參積累+雙參數(shù)CFAR、非相參積累+CA-CFAR)的檢測結(jié)果與O-INet算法進(jìn)行比較,測試結(jié)果如表5所示。選擇與檢測概率在定義上相近的召回率作為深度學(xué)習(xí)模型(O-INet)檢測概率的評價指標(biāo);同時,為了使O-INet能夠在不同的虛警概率下與兩種CFAR算法進(jìn)行對比,本文通過調(diào)整置信度閾值的方式實現(xiàn)對O-INet虛警率的調(diào)控。
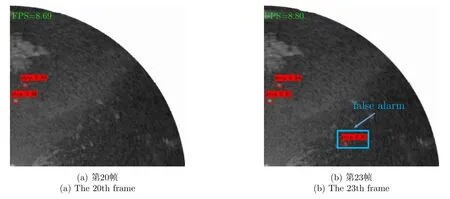
圖 12 中雨下的多目標(biāo)(Data_05#)檢測結(jié)果對比Fig. 12 Comparison of multi-target detection results under rain weather (Data_05#)

表 4 各類算法的實驗結(jié)果對比Tab. 4 Comparison of experimental results on different algorithms
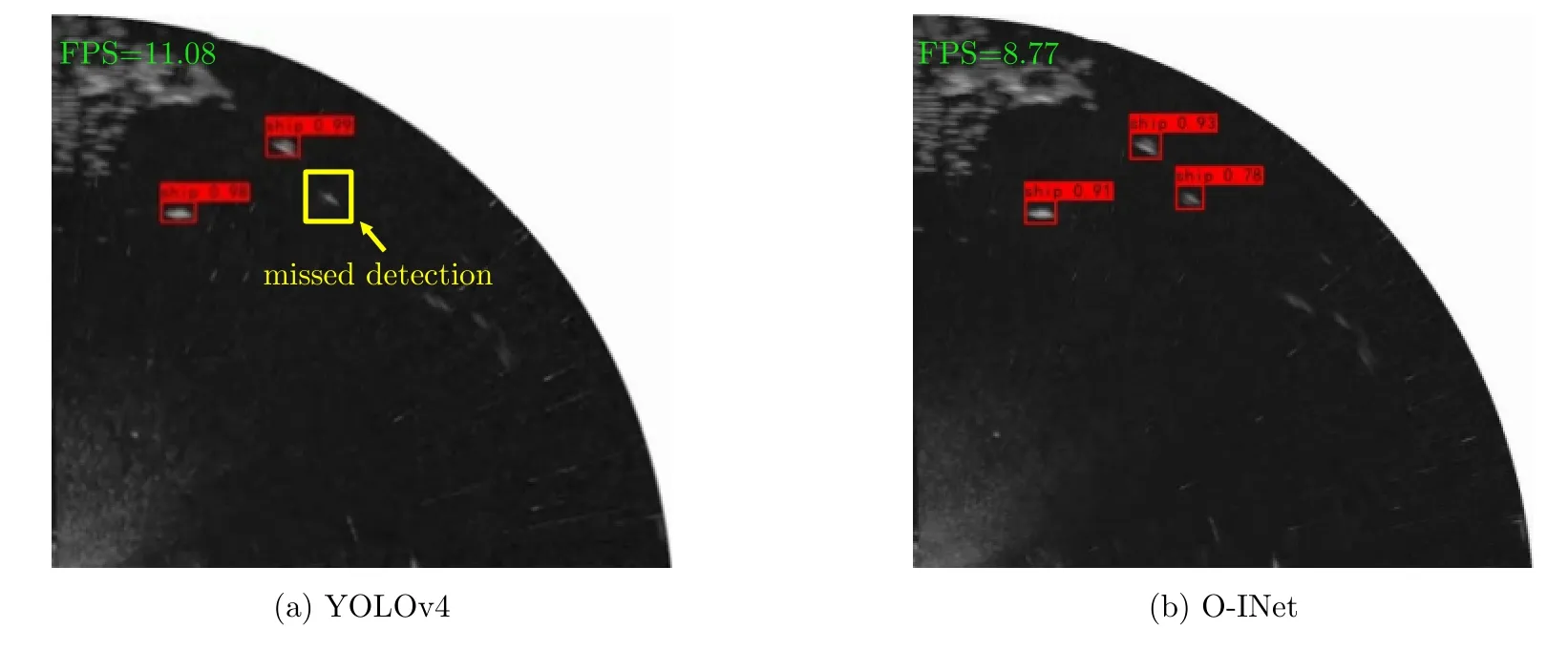
圖 13 低海況簡單背景下的動目標(biāo)(Data_01#)檢測結(jié)果對比Fig. 13 Comparison of moving targets under simple background of low sea state (Data_01#)
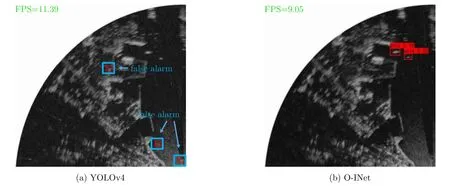
圖 14 低海況復(fù)雜背景下的動目標(biāo)(Data_02#)檢測結(jié)果對比Fig. 14 Moving target detection under complex background of low sea state (Data_02#)
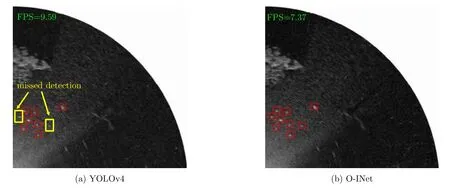
圖 15 高海況下的多目標(biāo)(Data_03#)檢測結(jié)果對比Fig. 15 Multi-target detection under high sea conditions (Data_03#)

圖 16 大雪下的多目標(biāo)(Data_04#)檢測結(jié)果對比Fig. 16 Multi-target detection under heavy snow (Data_04#)
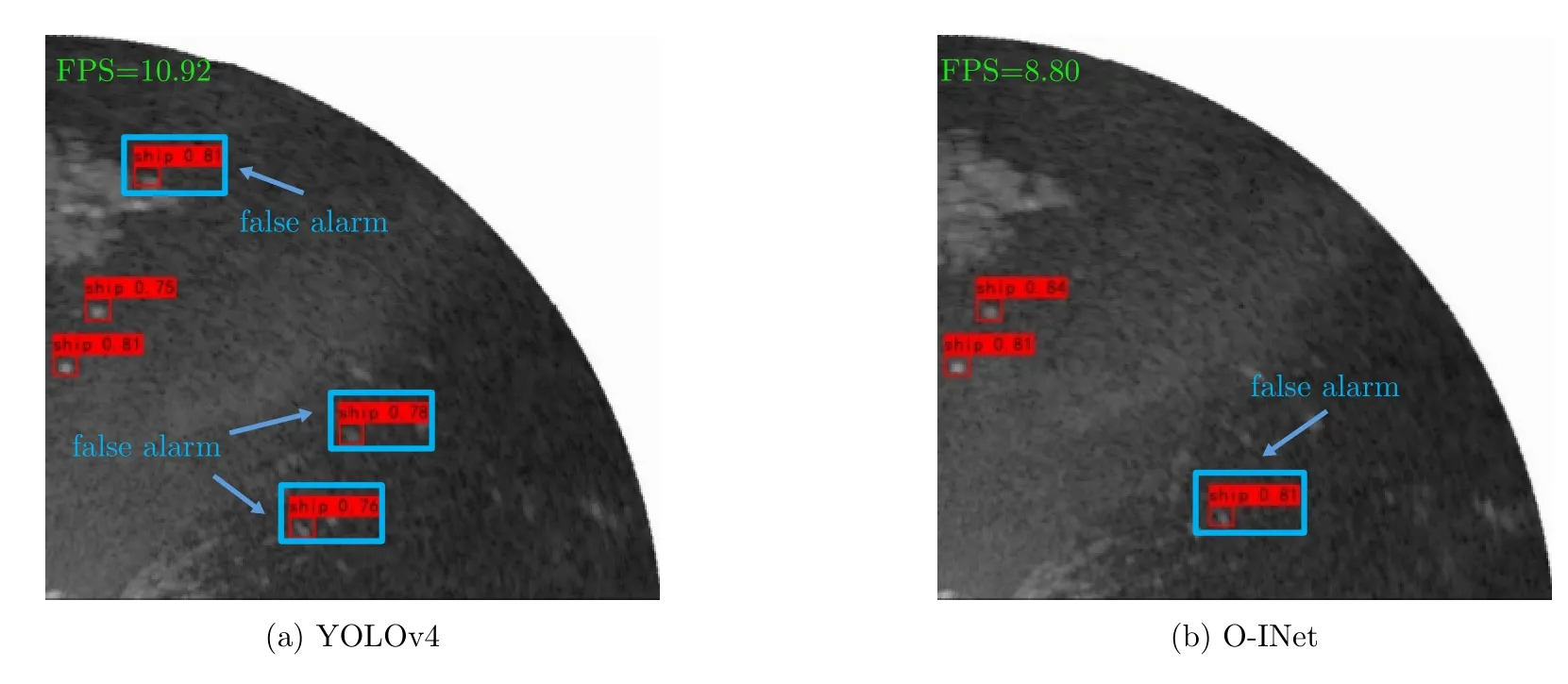
圖 17 中雨下的動目標(biāo)(Data_05#)檢測結(jié)果對比Fig. 17 Comparison of multi-target detection results under rain weather (Data_05#)
從表5中可以看出,兩種CFAR方法的檢測效果不佳,CFAR算法受背景環(huán)境雜波分布模型的限制,單一的雜波分布模型不能適應(yīng)多樣的背景環(huán)境,對目標(biāo)檢測時易受到地雜波(島嶼、陸地)和海雜波的干擾,檢測性能不穩(wěn)定。經(jīng)過對比發(fā)現(xiàn),本文所提的方法比兩種CFAR算法在相同虛警率的情況下有著更高的檢測概率,且檢測性能更穩(wěn)健。
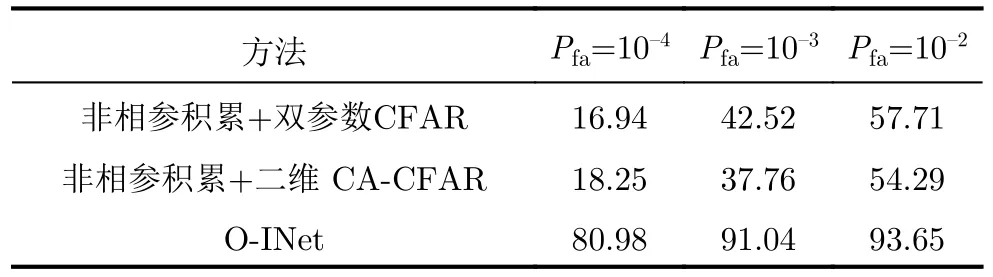
表 5 對測試集的檢測結(jié)果(%)Tab. 5 Test results about the test dataset (%)
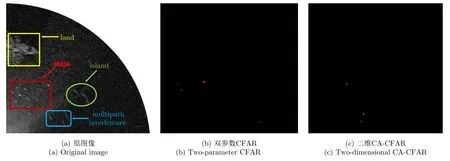
圖 18 高海況下的多目標(biāo)(Data_03#)檢測結(jié)果Fig. 18 Multi-target detection results under high sea conditions (Data_03#)
圖18 給出了虛警率為10—3下的對比檢測結(jié)果。可以看出,受強(qiáng)海雜波干擾兩種算法對Data_03#高海況下的動目標(biāo)檢測時漏檢率較高,而雙參數(shù)CFAR漏檢率低于二維CA-CFAR;兩種算法都存在虛警損失的問題。總體來講,兩種CFAR算法不能適應(yīng)多樣的背景環(huán)境,對目標(biāo)檢測時易受到地雜波(島嶼、陸地)、多徑散射和海雜波以及雨雪雜波的干擾,檢測性能不穩(wěn)定,而且存在虛警損失,而O-INet算法具有更好的泛化能力,抗雜波干擾能力更強(qiáng)。
綜上,O-INet算法能夠較好得實現(xiàn)不同海況、不同目標(biāo)數(shù)量、不同檢測背景下的動目標(biāo)檢測任務(wù),具有較好的泛化能力,較好地改善了漏檢率高、虛警率高的“雙高”問題,具有良好的動目標(biāo)檢測性能。
5 結(jié)論
針對現(xiàn)有雷達(dá)海面目標(biāo)檢測算法性能上限低和泛化能力弱的現(xiàn)狀,本文提出了一種基于INet的導(dǎo)航雷達(dá)圖像雜波抑制和海面動目標(biāo)檢測方法,并利用實測數(shù)據(jù)測試和驗證了模型檢測海面動目標(biāo)的實時性和準(zhǔn)確性,主要工作總結(jié)如下:設(shè)計了雜波抑制和目標(biāo)檢測融合網(wǎng)絡(luò)INet,構(gòu)建了INet目標(biāo)檢測模型;通過采集不同觀測條件下的數(shù)據(jù),構(gòu)建了海面目標(biāo)數(shù)據(jù)集;通過預(yù)訓(xùn)練和幀間積累對INet 目標(biāo)檢測模型進(jìn)行了優(yōu)化,得到了O-INet目標(biāo)檢測模型;實測數(shù)據(jù)實驗證明,O-INet與經(jīng)典的算法YOLOv4相比平均速度慢約2 FPS,但是檢測概率得到了約3%的提升,虛警率降低到了0.33%,與傳統(tǒng)的目標(biāo)檢測算法雙參數(shù)CFAR和二維CA-CFAR相比泛化能力更強(qiáng),可以較好地完成海面動目標(biāo)實時檢測任務(wù)。本文所提網(wǎng)絡(luò)模型也為其它雜波背景下的雷達(dá)目標(biāo)智能檢測提供了新的途徑,后續(xù)可在海面目標(biāo)數(shù)據(jù)集的擴(kuò)充、圖像的精準(zhǔn)自動化標(biāo)注等方面進(jìn)行更深入的研究,進(jìn)一步提高復(fù)雜背景環(huán)境下模型的檢測精度和泛化能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12