基于中控屏的預測性導航控制
2020-09-06 13:28:22王嬰徐溫溫郭永杰孫永安魯志超
汽車實用技術 2020年16期
關鍵詞:發動機
王嬰 徐溫溫 郭永杰 孫永安 魯志超


摘 要:隨著科技的逐步發展,高級輔助駕駛系統(ADAS,Advanced Driver Assistant System)的應用已經非常成熟與普遍,地圖數據不僅用于路徑規劃,還可用于車內燈光控制、巡航控制、增強導航等。文章提出了一種基于導航的預測性控制方法,中控屏通過獲取地圖數據的相關數據,并將該數據發到總線上,發動機針對獲取相關數據進行預判并制定相關策略,更改整車動力性能。經過反復實驗驗證,該方法能夠有效提供道路信息,實現整車的節油性能。
關鍵詞:預測性控制;中控屏;發動機;節油性能
中圖分類號:U495 ?文獻標識碼:A ?文章編號:1671-7988(2020)16-25-02
Abstract: With the development of science and technology, the application of advanced driver assistant system (ADAS) is very mature and common. Map data is not only used for path planning, but also for interior lighting control, cruise control, enhanced navigation, etc. This paper presents a predictive control method based on navigation. The Multi-Media interface(MMI)obtains the relevant data of map data and sends the data to the bus. The engine pre judges the relevant data and makes relevant strategies to change the vehicle's power performance. Through repeated experiments, this method can effectively provide road information and achieve fuel saving performance of the whole vehicle.
Keywords: Predictive control; MMI; Engine; Fuel saving performance
CLC NO.: U495 ?Document Code: A ?Article ID: 1671-7988(2020)16-25-02
1 引言
近年來,隨著自動駕駛的技術不斷成熟,ADAS的普及率也越來越高。ADAS系統[1]主要通過感知層、決策層及控制層完成信息的采集、判斷及執行。目前,ADAS系統包含了行人監測預警、車道偏離預警、自動緊急制動、全景泊車、駕駛員疲勞檢測等功能。
ADAS系統與周圍系統交互是基于ADASIS(Advanced Driver Assistant Systems Interface Specifications)實現的,即ADASIS是ADAS的接口說明。ADASIS中定義了地圖與ADAS的數據模型與傳輸方式(CAN總線)。
由于ADAS的感知層需要有各種傳感器達到監測的目的,如激光雷達、攝像頭、紅外線傳感器等,不僅成本耗費大,且監測范圍有限,不能獲取更大范圍內的數據,因此本文提出一種基于高精度導航地圖的預測性控制方法,該方法基于現有的高精度導航數據[2],通過提取導航的坡度信息、曲率、航向等信息發向CAN總線[3],發動機獲取到相關信息后,執行相應的信息判斷及執行策略,進而進而達到減少油耗的目的。
2 預測性導航控制方法
2.1 中控屏控制
本文預測性控制導航的數據是基于高精度地圖數據實現,如圖(a)所示,圖(b)為預測性控制導航的開關,當開關關閉時,中控屏發送部分元數據,如地圖供應商、通訊協議版本、硬件版本等;當開關打開時,中控屏會發送所有關于路徑的相關信息,由發動機作相應的判斷進而使發動機工作在經濟轉速區。
2.2 交互原理
本文基于ADASIS V2傳輸相關路況信息,ADASIS V2數據中包含了兩大重要信息點:位置信息及道路信息。位置信息包含了路徑編號、偏移量、速度及與道路的相對方向等;道路信息包含了路徑編號、公路等級、道路組成、限速及各種交通標志等,ADASIS V2傳輸時只傳輸最有可能的一條路徑信息,由于該信息與導航信息結合,因此ADASIS V2傳輸的路況信息為導航實際已經規劃好的路線的相關信息。這樣基于導航高精度地圖提取道路的相關信息與相關探測設備相比,可以大范圍獲取前方路況,且大大降低成本。
另外,導航提供的路段信息使車輛提前感知,提前制定以經濟性為指標的輸出方案,使發送機更多的工作在高效區間,提高運營效率,降低運營成本。
2.3 交互原理
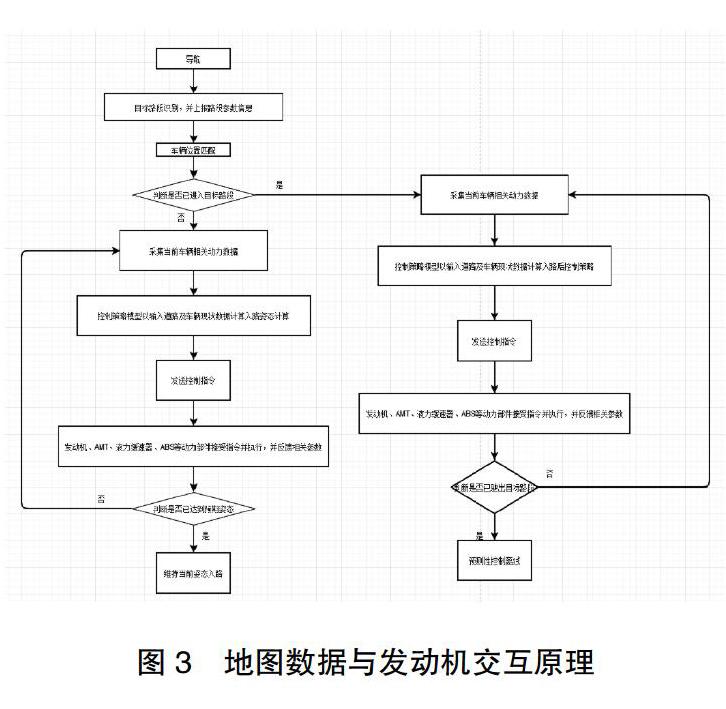
地圖數據與發動機交互原理如下所示:
當中控預測性功能打開時,當前GPS、導航地圖數據與當前目標路段圖層匹配,并在一定時間前發出事件預警,當該信息通過中控屏發送至總線上時,發動機以油門開度為輸入,及時調整油門大小,并實時反饋發動機動力性能指標,如轉速,扭矩百分比(或者真實扭矩,本文中使用扭矩百分比),發動機的工作模式(PCC)目前分為5種,即平路、欲上坡加速、上坡減速、與下坡減速、下坡減速;變速箱根據預測性控制信息及發動機的狀態,及時調整變速箱的檔位,進而完成車輛最經濟的動力控制。
3 實驗分析
為驗證基于預測性導航的有效性,實驗時選擇安康地區的多陡坡路段進行測試,實驗結果如下所示:
由上述曲線圖中,PCC指發動機根據地圖的道路信息,確定自己處于那種工作模式,該模式是車輛在定速巡航狀態,由圖可知,定速巡航車速為80km/h,在PCC模式下,發動機具體根據路段情況,對車速進行調整,進而使發動機始終處于經濟轉速區,從而整車的油耗下降,充分說明該方法的有效性。
4 結束語
本文提出了一種基于中控屏的預測性控制方法,該方法基于ADASIS V2協議提取相關路徑信息,然后將該信息通過中控屏發送到CAN總線,發動機ECU接收到該信號后,對信息作出判斷并有效改變發動機當前運行狀態,進而達到節約油耗的目的。經過實際路況測試,當打開預測性導航控制功能時,發動機、變速箱對數據進行綜合處理,改變當前整車的運行工況,調整噴油量、速度及檔位,使發動機工作在經濟轉速區進而達到減少油耗的目的。
參考文獻
[1] 張志強.ADAS的發展歷程及趨勢[J].內燃機與配件,2019(01):80-82.
[2] 陳志鋒.ADAS導航地圖高程畸變處理算法及實現[D].北京建筑大學,2019.
[3] 楊立琦.ADAS路試數據回放系統的設計與實現[D].北京交通大學,2016.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
