基于Process Simulation的機(jī)器人裝配工位的應(yīng)用研究
2020-09-08 04:04:34于斌張佳俊柳躍雷黃濤陳成
機(jī)械工程師 2020年8期
于斌, 張佳俊, 柳躍雷, 黃濤, 陳成
(重慶長安汽車股份有限公司制造中心,重慶401133)
0 引 言
隨著智能化與信息化的到來,越來越多的機(jī)器人被投入到汽車裝配領(lǐng)域,因此在生產(chǎn)線設(shè)計(jì)階段就需要對(duì)機(jī)器人的運(yùn)動(dòng)進(jìn)行仿真分析。
Process Simulation集成了真實(shí)機(jī)器人的仿真技術(shù),它可以在虛擬的裝配環(huán)境中對(duì)不同類型的機(jī)器人進(jìn)行仿真,因此在設(shè)計(jì)階段就可以對(duì)機(jī)器人的運(yùn)動(dòng)路徑、布局和生產(chǎn)節(jié)拍進(jìn)行規(guī)劃[1],從而達(dá)到減少實(shí)際生產(chǎn)線機(jī)器人裝配工位的調(diào)試時(shí)間和成本的目的。
1 仿真數(shù)據(jù)的準(zhǔn)備與打開
打開Process Designer,在個(gè)人工作文件夾中新建Studyfloder節(jié)點(diǎn),在該節(jié)點(diǎn)創(chuàng)建RobcadStudy節(jié)點(diǎn),并按照工位號(hào)和名稱重命名。將需要進(jìn)行驗(yàn)證的東西(資源樹、操作樹、產(chǎn)品、焊點(diǎn)等),手動(dòng)拖入RobcadStudy中(如圖1),完成仿真前的數(shù)據(jù)準(zhǔn)備[1-3]。
在Process Designer中,選擇對(duì)應(yīng)需要進(jìn)行仿真驗(yàn)證的RobcadStudy文件夾并右擊Open with Process Simulate in Standard Mode命令,運(yùn)行Process Simulate并加載RobcadStudy中的仿真數(shù)據(jù),這樣就進(jìn)入了Process Simulation的仿真環(huán)境中。
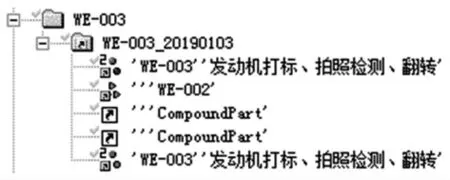
圖1 仿真文件夾
2 機(jī)器人裝配工位仿真
2.1 夾具的定義與安裝
當(dāng)裝配工位布局完成并進(jìn)入Process Simulation中后,首先要對(duì)機(jī)器人的夾具進(jìn)行機(jī)構(gòu)的動(dòng)作定義[4],此時(shí)需要將夾具激活。如圖2所示,選中擰緊機(jī)構(gòu),并點(diǎn)擊【Modeling】、【Set Modeling Scope】,此時(shí)擰緊機(jī)構(gòu)的資源節(jié)點(diǎn)變成紅色的M,代表數(shù)據(jù)處于可編輯狀態(tài)。
接下來,對(duì)夾具進(jìn)行動(dòng)作的定義,在Kinematics Editor 界面中(如圖3),選中黃色的零部件定義為變位機(jī)構(gòu),綠色的零部件為滑軌底座,將二者連接起來并定義它們之間的運(yùn)動(dòng)關(guān)系(如圖4),在關(guān)節(jié)屬性界面可以定義運(yùn)動(dòng)關(guān)系、方式、行程、速度、加速度等參數(shù),此時(shí)仿真中的夾具與實(shí)際生產(chǎn)過程中夾具的動(dòng)作保持一致,保證了仿真結(jié)果的真實(shí)性和可靠性[5]。

圖2 夾具激活及其狀態(tài)顯示
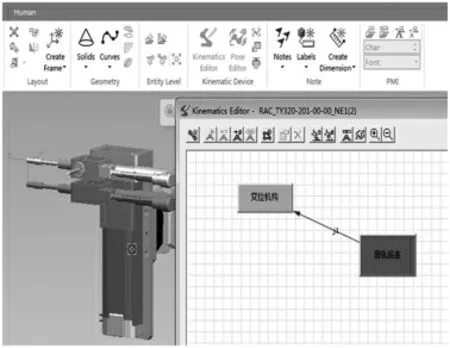
圖3 夾具機(jī)構(gòu)定義

圖4 夾具機(jī)構(gòu)運(yùn)動(dòng)關(guān)系
對(duì)機(jī)器人夾具進(jìn)行類型的定義,例如Gripper、Gun、Servo Gun等類型,并設(shè)置TCP坐標(biāo)和基礎(chǔ)坐標(biāo)(如圖5),此夾具定義為Gripper,將TCP1定義為機(jī)器人和夾具運(yùn)動(dòng)的TCP坐標(biāo)。
設(shè)置完成后,將夾具安裝于機(jī)器人上(如圖6),選擇機(jī)器人和與之對(duì)應(yīng)的夾具,選擇機(jī)器人的安裝坐標(biāo)和機(jī)器人夾具的安裝坐標(biāo),二者相互配合,將夾具安裝到機(jī)器人上。
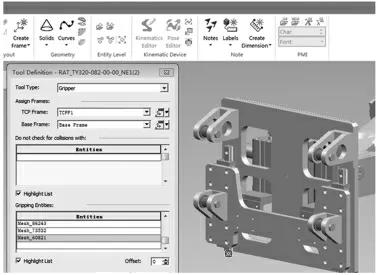
圖5 夾具類型定義及坐標(biāo)設(shè)置
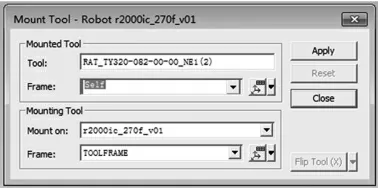
圖6 機(jī)器人夾具安裝
2.2 機(jī)器人路徑規(guī)劃
2.2.1 機(jī)器人移動(dòng)及路徑選擇
機(jī)器人和夾具的移動(dòng)都是以機(jī)器人TCP坐標(biāo)為基準(zhǔn)點(diǎn),選中機(jī)器人,并點(diǎn)擊【Robot】、【Robot Jog】,可以進(jìn)入Robot Jog界面(如圖7),可以直接拖動(dòng)圖中的坐標(biāo)進(jìn)行機(jī)器人的大方向移動(dòng),也可以在此界面上的Translate和Rotate上進(jìn)行機(jī)器人位置的微調(diào),通過以上2種方式就可以對(duì)機(jī)器人的路徑進(jìn)行規(guī)劃。
如圖8所示,機(jī)器人路徑坐標(biāo)的選取有兩種方式:1)添加當(dāng)前坐標(biāo)(Add Current Location)。
此方法適用于將機(jī)器人拖動(dòng)到一個(gè)合適的位置并添加當(dāng)前坐標(biāo)。2)添加已有位置(Add Location By Pick)。此方法適用于已知機(jī)器人具體路徑位置的情況。
通過機(jī)器人的移動(dòng)及路徑坐標(biāo)點(diǎn)的選擇[6-7],機(jī)器人的工作路徑就已經(jīng)初步規(guī)劃完畢,如圖9所示。
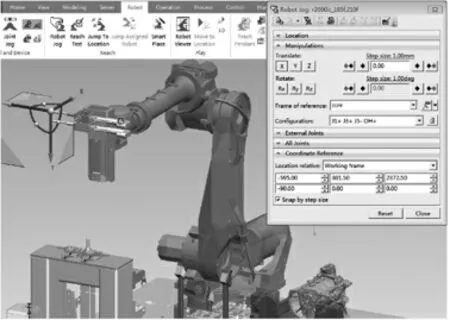
圖7 機(jī)器人移動(dòng)方式
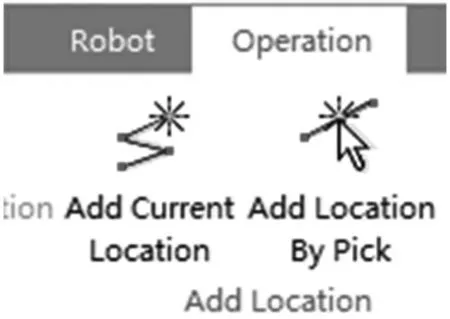
圖8 路徑坐標(biāo)選擇
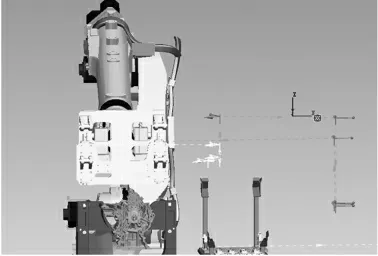
圖9 機(jī)器人路徑坐標(biāo)
路徑初步規(guī)劃完成后,利用干涉檢查工具確定機(jī)器人、工位設(shè)備、工裝及零部件之間是否存在干涉。如圖10所示,選擇要進(jìn)行干涉檢查的項(xiàng)目(工位的防護(hù)圍欄和機(jī)器人夾具),若存在干涉,則需要對(duì)機(jī)器人路徑重新進(jìn)行規(guī)劃。
2.2.2 機(jī)器人路徑優(yōu)化
當(dāng)機(jī)器人路徑規(guī)劃完成后,首先需要對(duì)路徑進(jìn)行可達(dá)性分析,判斷選擇的路徑坐標(biāo)機(jī)器人是否可以達(dá)到,點(diǎn)擊【Robot】、【Reach Test】,將規(guī)劃好的機(jī)器人坐標(biāo)添加進(jìn)去(如圖11),圖中坐標(biāo)后都為,代表坐標(biāo)位置機(jī)器人都可以達(dá)到。
可達(dá)性分析結(jié)束后,需要對(duì)機(jī)器人的關(guān)節(jié)進(jìn)行分析,因?yàn)橛行┪恢脵C(jī)器人雖然可以到達(dá),但是可能此位置不屬于機(jī)器人的理想工作范圍內(nèi),長時(shí)間移動(dòng)到此位置對(duì)機(jī)器人的傷害較大,右擊機(jī)器人,選擇Robot Viewer模塊,這個(gè)模塊可以實(shí)時(shí)顯示機(jī)器人6個(gè)關(guān)節(jié)的角度位置并且可以判斷機(jī)器人移動(dòng)過程中是否在理想范圍內(nèi)(如圖12),從圖中可以看出,此位置下機(jī)器人的第二軸j2已經(jīng)超出了理想范圍,因此需要重新規(guī)劃路徑。
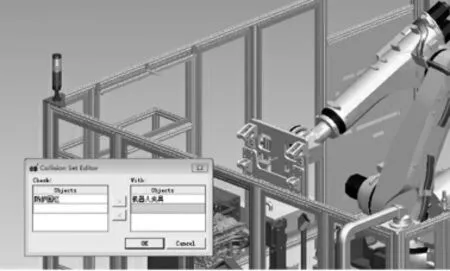
圖10 干涉檢查
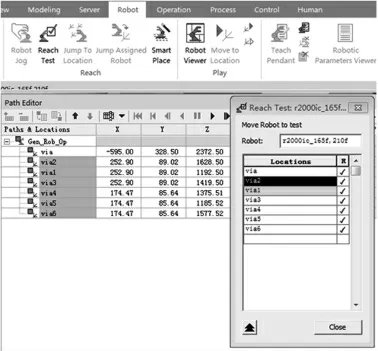
圖11 可達(dá)性分析

圖12 Robot Viewer界面
2.3 機(jī)器人工位節(jié)拍
在機(jī)器人路徑規(guī)劃完成后,根據(jù)實(shí)際情況需要對(duì)機(jī)器人的控制器進(jìn)行選型。控制選擇完成后需要對(duì)其運(yùn)動(dòng)方式進(jìn)行設(shè)置,機(jī)器人有LIN、PTP和CIRC等3種運(yùn)動(dòng)方式,分別為線性、關(guān)節(jié)和弧線運(yùn)動(dòng)(如圖13)。
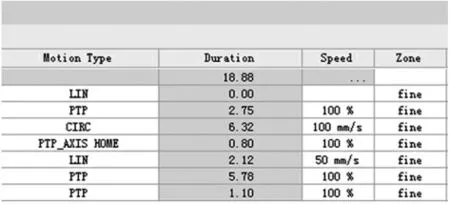
圖13 機(jī)器人參數(shù)設(shè)置
當(dāng)機(jī)器人的控制器和運(yùn)動(dòng)方式設(shè)置完成后,仿真過程與實(shí)際生產(chǎn)基本一致,因此仿真計(jì)算節(jié)拍有很強(qiáng)的參考價(jià)值,可以針對(duì)性地對(duì)機(jī)器人裝配工位的生產(chǎn)節(jié)拍進(jìn)行統(tǒng)計(jì),對(duì)各機(jī)器人的工作量進(jìn)行評(píng)估和平衡,最大限度地提高節(jié)拍和機(jī)器人使用率[8]。
3 機(jī)器人裝配工位規(guī)劃方案
通過對(duì)Process Simulation的應(yīng)用研究,機(jī)器人裝配工位已經(jīng)形成了一套完整的數(shù)字化規(guī)劃方案(如圖14),將工藝規(guī)劃階段、仿真驗(yàn)證階段與產(chǎn)品設(shè)計(jì)連接起來,對(duì)以后工程的實(shí)施有著重要的指導(dǎo)作用。
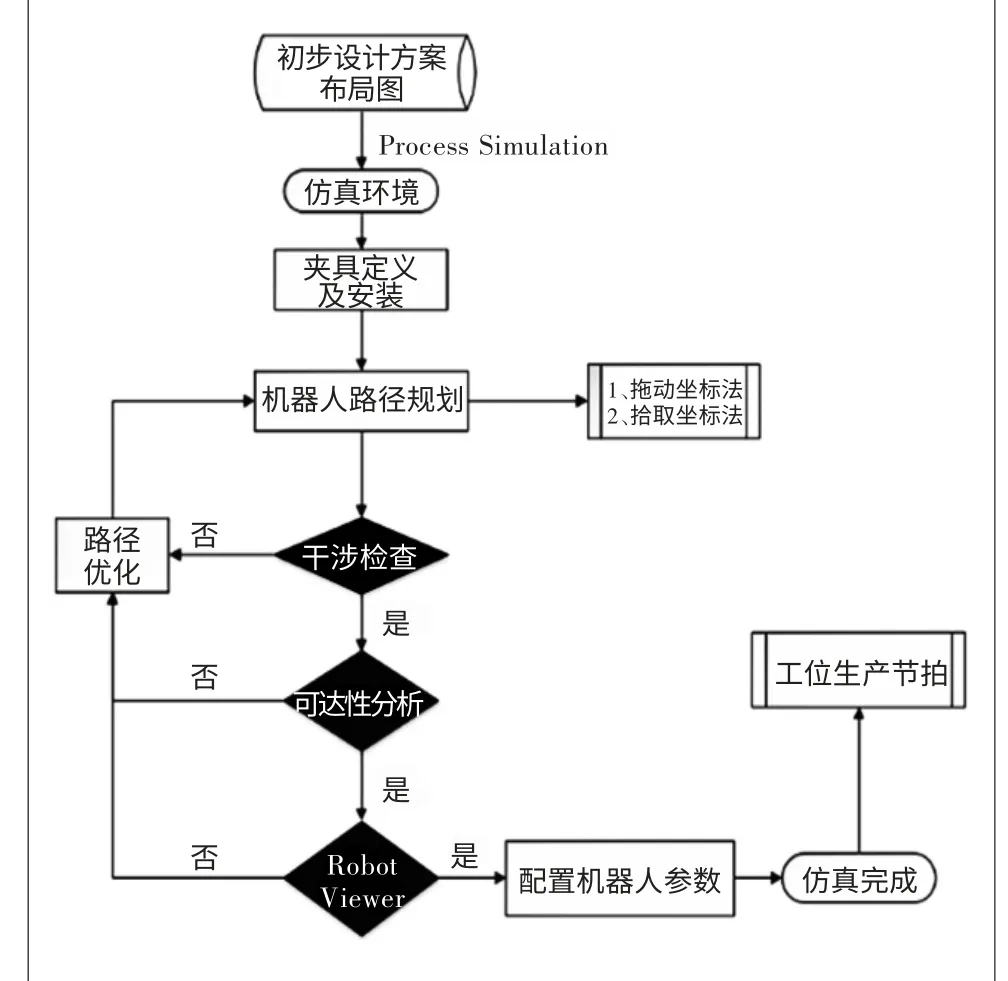
圖14 數(shù)字化規(guī)劃方案
4 結(jié) 語
通過Process Simulation對(duì)機(jī)器人裝配工位的仿真,有效地驗(yàn)證了設(shè)計(jì)方案的可行性,避免了成本浪費(fèi)。
在生產(chǎn)線規(guī)劃過程中,利用精確的仿真技術(shù),實(shí)現(xiàn)了對(duì)機(jī)器人裝配工位的規(guī)劃、設(shè)計(jì),充分考慮了規(guī)劃設(shè)計(jì)中的工藝可行性,預(yù)見了項(xiàng)目存在的風(fēng)險(xiǎn),縮短了機(jī)器人的實(shí)際調(diào)試周期。
猜你喜歡
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
商周刊(2017年5期)2017-08-22 03:35:26
濰坊學(xué)院學(xué)報(bào)(2016年2期)2016-12-01 13:00:11
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
山東青年(2016年1期)2016-02-28 14:25:25
中國工程咨詢(2016年4期)2016-02-14 07:28:28
新聞傳播(2015年11期)2015-07-18 11:15:04
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
