
人眼視覺與汽車后視鏡優化設計
2020-09-10 13:53:31顧君杰
內燃機與配件 2020年9期
關鍵詞:設計
顧君杰

摘要:后視鏡是輔助車輛駕駛人員對車輛后方以及兩側運動情況進行觀察的重要工具,在安全行駛中發揮著非常重要的作用。電動后視鏡操作便捷,但在更換駕駛人員時長需要多次調節以生成最佳后方視野。為了方便此項操作,本文在考慮人眼視覺的條件下,提出一種汽車后視鏡優化設計方案,結合定位坐標透視校正算法實現坐標校正,以達到駕駛人員眼部最佳空間位置,并為汽車后視鏡角度轉換提供參考與支持,相關研究內容需要引起業內人士的關注與參考。
關鍵詞:汽車后視鏡;人眼視覺;設計
0? 引言
汽車后視鏡優化設計可以通過引入自動調節裝置的方式滿足人眼視覺需求。通過對駕駛員人眼空間位置進行定位的方式,計算汽車后視鏡的適宜角度,然后將調節數據發送至控制系統。在此過程中,如何達到精準匹配的數據,是業內人士高度重視的一項課題。本文即以此為研究背景,提出一種駕駛人員人眼圖像定位矯正以及角度轉換的算法,通過攝像頭拍攝駕駛人員圖像位置根據定位區域進行選擇,并通過人眼識別的方式進行人眼坐標定位,可滿足圖像識別準確率方面的要求,以下針對考慮人眼視覺條件下的汽車后視鏡優化設計方案進行分析。
1? 定位區域與攝像頭位置
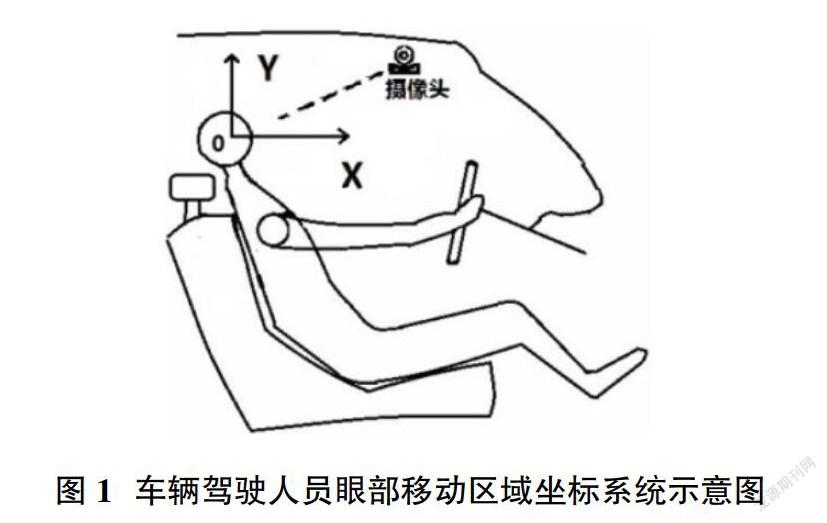
駕駛人員在駕駛汽車前需要調整至標準坐姿以確保車輛行駛的穩定與安全,駕駛人員身體需要與汽車方向盤保持對正關系,背部依靠駕駛座位且保持一定傾斜角度,以駕駛姿勢舒適為標準,角度保持豎直和110°,盡可能增加人體與座位靠椅間的接觸面積。正常行駛狀態下,駕駛人員無需左右移動身體,通過調節座椅前后距離的方式滿足駕駛需求。圖1為車輛駕駛人員眼部移動區域坐標系統,在車輛內部三維空間中,眼部僅在x軸、y軸方向發生變化,形成平面內變化區域,因此駕駛人員可以通過汽車后視鏡獲得最佳視野的眼部中心區域可以表達為(0,ymax)以及(xmax,0)。
為降低系統硬件成本,采用單個攝像頭對駕駛人員進行拍照,為確保眼部X軸以及y軸方向坐標定位的精確性,在駕駛人員前、右上方安裝攝像頭,與x軸,y軸均呈45°角,以最大限度控制誤差。本系統選用CMOS攝像頭工作模塊,假定安裝位置可確保采集圖像中覆蓋(0,ymax)以及(xmax,0)構成區域的像素數在70~100萬范圍內,以80萬像素為例,假定采集圖像覆蓋區域為(0,380mm)與(400mm,0),與之對應圖像像素為985×812,則X軸向單個像素代表0.41mm,y軸向單個像素代表0.46mm,定位分辨率為0.46mm,不會對駕駛人員汽車后視鏡調節結果產生影響。
2? 定位坐標透視校正算法
透視校正是根據所獲取圖像幾何結構特征來定位圖像需矯正區域正視面的結構特征。若單一對圖像進行不同比例的縮放,則所生成圖像形態無法滿足透視校正的需求,還會導致原圖像中大量細節信息丟失。為解決該問題,就需要通過分析透視面與正視面的方式,探討變化所對應的映射規律,以達到定位坐標矯正處理的方式。因此,在考慮人眼視覺對汽車后視鏡進行優化設計的過程中,最核心的問題就是將所給定標準采集圖像所對應人眼定位區域轉換為真實移動位置,通過P轉換的方式,轉換為有關圖像像素的坐標變化問題。
在自P(x,y)轉換至■的過程當中,當人眼定位區域P初始位置產生改變時,該位置變化在真實移動位置中同樣有相應的改變,對該變化進行建模,形成P以及所對應的映射關系函數,即將每一個透視面I的點通過銀蛇關系函數形成與之對應正視面的點,可以用■的方式進行表示。利用這種方式,可以得到對于人員定位坐標點x而言,至汽車駕駛人員移動空間位置坐標點x′的映射關系,映射后點并非原始圖像中的像素點,而是在原始圖像采集范圍內轉換映射函數所生成的新像素點坐標。對于透視面以及正視面而言,兩者間的映射關系是通過數字圖像中像素坐標值轉換為另一離散圖像坐標值的過程,在該情況下有較高的穩定性,不會受到其他因素的影響。經變換處理后,對于汽車駕駛人員而言,人眼視覺范圍所定位的任意像素(x,y)而言,可以得到實際移動空間內所對應的點位(x′,y′)。一般來說,在對原目標坐標位置進行變化處理后,光柵點不處于對應區域內,源到目標的變化情況如圖2所示。
結合上述分析可知,對于汽車駕駛人員圖像而言,考慮人眼視覺情況下定位坐標的變化能夠生成一個有效且真實的空間位置坐標,且圖像連續,不會使離散像素位置映射而導致較大誤差,還確保了后視鏡視覺狀態的有效性。基于定位坐標透視矯正算法的穩定性高,信息連續完整,效果可靠。
3? 后視鏡角度轉換
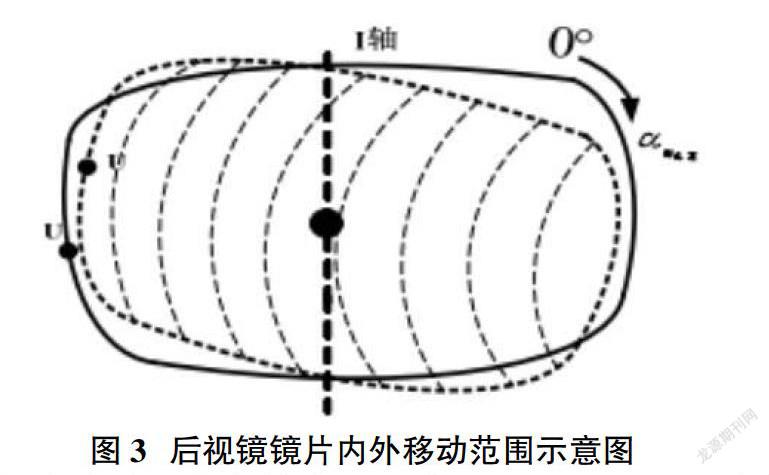
考慮到汽車左右兩側后視鏡位置與車輛駕駛人員的距離有所不同,因此在人眼視覺條件影響下,對汽車后視鏡的調節參數也存在一定的差異,獲得坐標后視鏡調節關系也有所區別,但對后視鏡角度的計算方法是一致的,僅計算過程中引入系數有不同。以下對矯正后坐標與汽車后視鏡角度關系進行計算,以汽車左側后視鏡駕駛人員可得到最佳車外觀察視野為例。圖3所示為后視鏡鏡片內外移動范圍示意圖。結合圖3,在駕駛人員眼部位置沿X軸向前或向后移動時,所對應后視鏡鏡片應當沿i軸中心點運動,同時以后視鏡左側U點為基準做向內或向外旋轉。在汽車后視鏡鏡片處于y=0情況下時,鏡片最外極限位置為0°,向內旋轉至極限角度為a,此情況下駕駛人員眼部位置向前移動距離為xmax,因此駕駛人員人眼視覺移動距離與汽車后視鏡鏡片調節角度存在一定的相關性關系。
假定內外調節參數為a,則有a=axmax。同時,在駕駛人員眼部沿Y軸做上、下運動時,鏡片需要沿i軸中心點運動,以V點位基準進行旋轉。而當后視鏡鏡片在對應x=0位置的情況下,后視鏡鏡片最上極限位置時設定為0°,極限轉動角度為β,則該條件下駕駛人員眼部位置向上移動距離為ymax。定義后視鏡鏡片上下調節參數為b,則有β=bymax。
4? 結束語
本文圍繞汽車后視鏡優化設計的關鍵問題進行分析,在考慮人眼視覺的條件下,通過對駕駛人員在車輛內移動范圍的分析判斷人眼定位區域,并在單攝像頭方案下對拍攝所產生透視畸變進行分析,引入定位坐標透視校正算法對人眼定位坐標進行校正,算法具有良好的穩定性,信息連續完整,效果可靠,通過算法得到正確的人眼空間位置坐標,為汽車后視鏡角度轉換提供參考與支持。
參考文獻:
[1]楊雙華,何冰強.基于MFI和UG的后視鏡外卡框注塑模具設計[J].工程塑料應用,2019,47(11):77-82,93.
[2]張亮,萬蓮,張倩,等.汽車后視鏡自調節模擬系統設計[J].河南科技,2019(29):75-77.
[3]蘇秀榮,齊智國,劉建,等.汽車外后視鏡抖動的試驗研究[J].內蒙古工業大學學報(自然科學版),2018,37(3):201-206.
[4]高武迪,王濤,李貝貝,等.基于柔性機構的汽車后視鏡調節裝置的設計與分析[J].寧波工程學院學報,2019,31(4):42-47.
[5]黃波,鐘銘恩,吳平東,等.基于車載視覺的駕駛員后視鏡查看行為檢測[J].圖學學報,2018,39(3):477-484.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
