基于超寬帶技術的車輛智能裝載導引系統
2020-09-10 05:59:12胡淦劉金超馬欣然孫艷鵬劉寧
交通科技與管理 2020年8期
胡淦 劉金超 馬欣然 孫艷鵬 劉寧
摘 要:為滿足重型車輛鐵路運輸日益增長的需求,解決現有裝運方式存在的問題,本文基于超寬帶定位技術設計了一種低成本、高效率的裝載引導系統。系統能夠有效彌補原有人工引導裝載方式的局限性和作業效率低下的不足,通過布置基站和標簽掌握待裝車輛與鐵路平車相對位置信息,為待裝車輛駕駛員提供車輛偏差信息,實現車輛安全、快速、精確裝車,從而提高鐵路裝卸效率,降低裝卸現場安全隱患,提升鐵路運輸服務質量。本文還對系統定位算法和UWB測距算法進行了優化,降低了整體成本提高了定位測量精確性。
關鍵詞:超寬帶;重型汽車;定位;測距
中圖分類號:TN925 文獻標識碼:A
我國鐵路運輸因其相對較低的運輸成本、巨大的運輸能力、準確的到發時間、高可靠性、高安全性等優點,成為內陸貨物運輸的重要手段。國內各商用車主機廠生產完成的成品重型汽車也經常會采用鐵路平車運輸的方式進行批量運輸,重型汽車裝載加固要求高,裝載難度大,受限于車輛高度和寬度,部分車輛尺寸會接近限界,某些車型寬度接近鐵路平車寬度,裝載過程中很容易對位不準,有時甚至會出現車輛掉落的情況。
目前重型汽車主要通過人工提示導引的方式進行裝載。每輛待裝車均通過高站臺與尾端平車相連的渡板駛上平車,并從列尾端向前行駛,直至到列達指定的平車既定位置停止。為保證車輛裝載過程中不偏離中線,需要數名輔助導引員同時指引駕駛員駕駛,效率低下且耗費人力,遇到夜間裝車情況,待裝車輛還需關閉大燈,由引導員用手電筒照亮指引,裝載效率和可靠性大大降低。
針對重型車輛裝載存在的問題,本文提出了一種基于超寬帶技術的重型汽車鐵路運輸裝載定位系統,用以代替人工引導,為待裝車駕駛員提供車輛位置及偏離信息,實現車輛安全、快速、精確裝車,從而提高鐵路裝卸效率,降低裝卸現場安全隱患,提升鐵路運輸服務質量。
1 超寬帶(UWB)測距原理
超寬帶無線技術(Ultra Wideband,UWB)是電磁波的一種,真空下傳播速度與光速相同,最早應用于軍用雷達技術領域,于2002年被FFC(美國聯邦通信委員會)批準民用,此后獲得了快速發展。由于UWB具備信息容量大、測距精度高、抗干擾性能強以及發送功率小等優點被人們廣泛關注,成為一種新興的測距定位技術,其電磁波輻射對人體的影響也很小。
UWB的測距方法是通過測量移動節點與固定節點傳播的時間信息以求出距離,主要采用飛行時間(Time Of Flight,TOF)、到達時間差(Time difference of Arrival,TDOA)兩種測距方式。TDOA定位需要精確的時鐘同步,分為有線時鐘同步和無線時鐘同步兩種方式,有線時鐘同步需要設計同步信號裝置,無線時鐘同步需要設計時鐘同步算法,設計實現較為復雜。而TOF定位采用雙向雙邊測距測量標簽到多個基站距離,基站無需時鐘同步。
2 裝載定位系統構成
2.1 系統整體方案
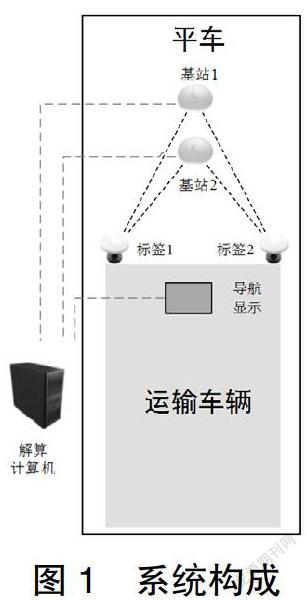
本方案中,每列車的頭車前端需固定兩個基站,兩基站均位于平車中心面上,每個運輸車輛車頭固定兩個標簽,兩標簽沿運輸車輛中心面對稱。若要保持運輸車輛沿中線行駛不偏移,則需保持各基站與每個標簽的實時距離分別相等,即保持基站和兩標簽三點相連的三角形始終為等腰三角形。當車輛發生偏移時,由基站間距、標簽間距以及標簽與倆基站的距離值可得到運輸車輛與板車中心線的偏移量。
2.2 定位系統構成
定位系統主要由2個固定基站(Mbs)、2個可移動標簽(Tag)、一個解算計算機以及一個平板電腦構成。
(1)基站(Mbs)。定位系統的兩個基站固定放置在車列的車頭位置,基站集成了UWB定位模塊、電源模塊以及無線傳輸模塊。基站的UWB信號收發模塊在接收到標簽發送的UWB信號后將信號轉換位數據通過無線模塊傳送給解算計算機進行處理。
(2)標簽模塊(Tag)。標簽像基站一樣集成了定位、電源以及無線模塊,標簽與基站實時通訊,將距離數據發送給基站,從而實現位置解算。
(3)解算計算機。接收基站發送的原始數據,并將經過解算得到車輛位置和中心偏離值發送給平板電腦端顯示。
(4)平板電腦。是定位系統與駕駛員的交互端,與解算計算機通過局域網實時通信,用于顯示汽車偏離數據,輔助駕駛員駕駛。
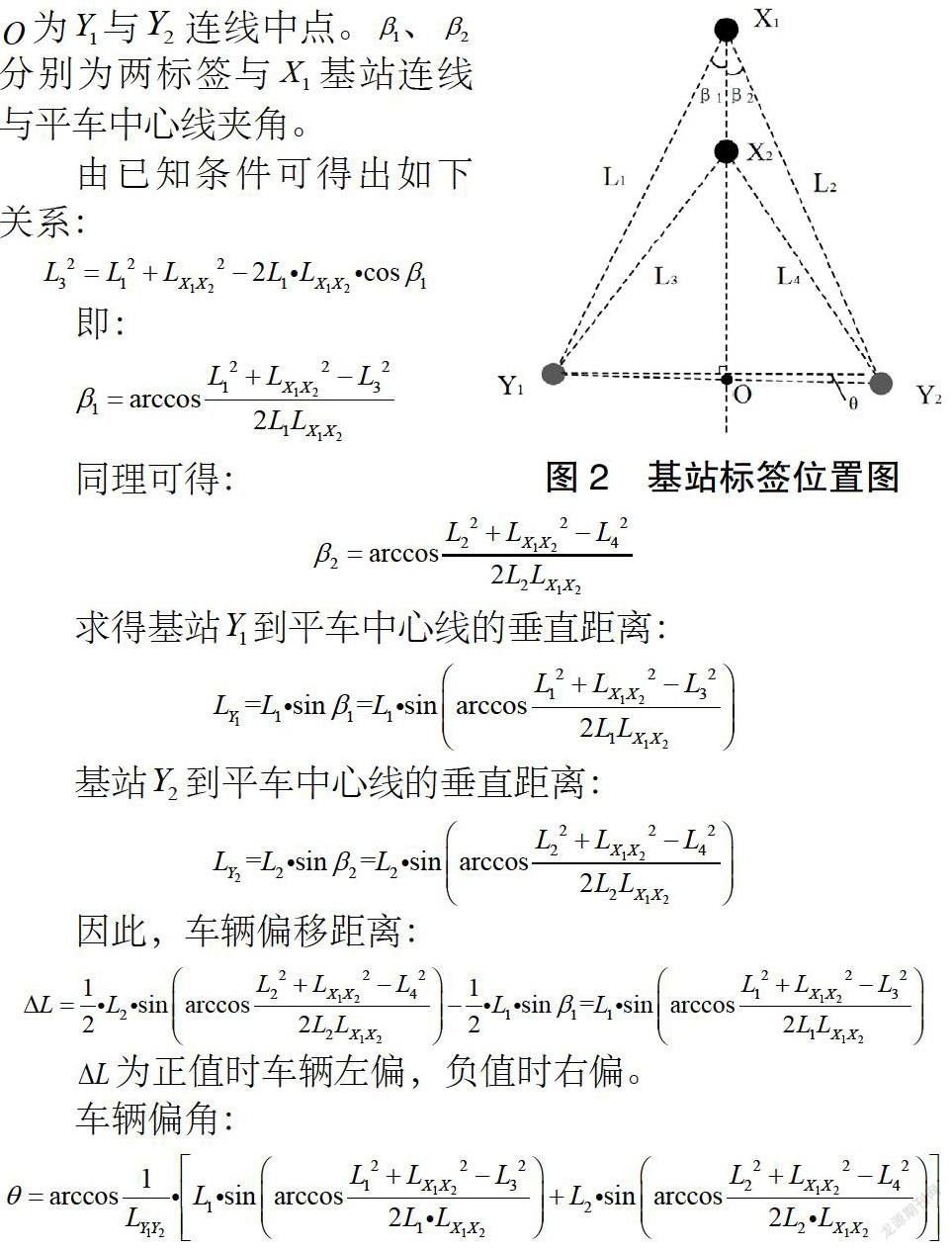
3 系統定位算法
超寬帶定位系統一般至少需要四個基站才能三維空間內標簽的定位,本論文提出的定位策略對定位算法進行了簡化,用兩個基站即可實現測偏差功能,減小了計算量降低了成本。
4 基于對稱雙邊雙向測距算法減小誤差
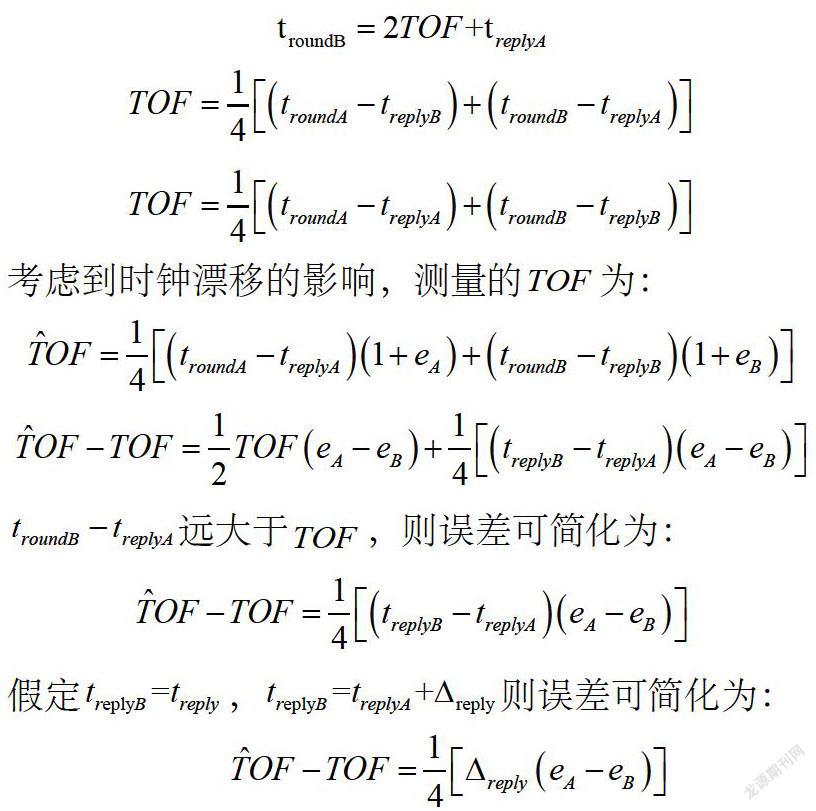
UWB測距精度決定了整個系統定位精度,而時鐘漂移引起的誤差是主要誤差,因此需要通過算法來減小誤差。
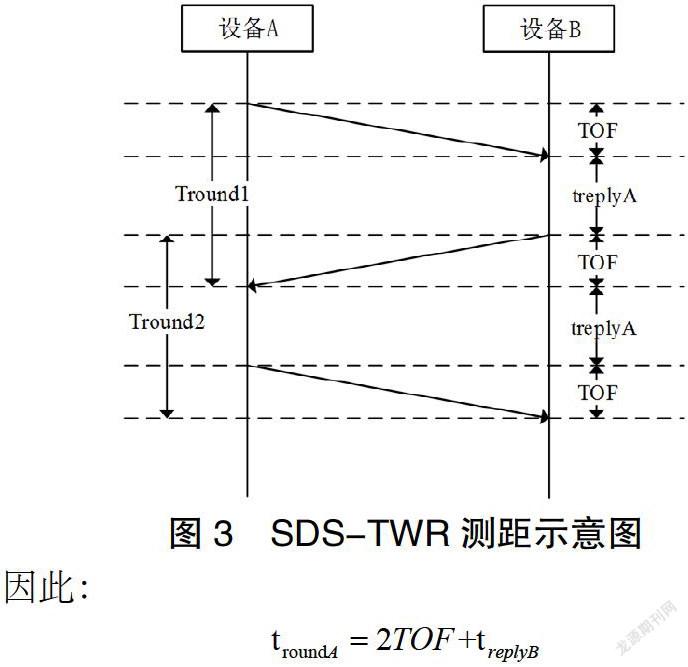
UWB定位系統最簡單的測距方式是單程測距,但是這對節點之間的時鐘同步要求極其嚴格,而基站和標簽間有各自本地時鐘,無法保證時間同步。雙程測距雖能消除節點之間未能完全同步的影響,但無法消除晶振時鐘漂移的影響。對稱雙邊雙向測距,可以消除晶振時鐘漂移的影響,這樣大大降低了定位的實時性。在此采用對稱雙邊雙向測距算法來減小時鐘漂移誤差。
對稱雙邊雙向測距示意圖如圖所示,圖中,A和B是一對基站和標簽,A收到響應后,經過時間TA向B發送信息,B收到信息后經過TB向A發送信息,A、B設備發送和收到信息時間差分別為Troud1、Troud2。
由此可得,通過對稱雙邊雙向測距算法使得時鐘漂移引起的誤差減半了。
5 結束語
本文基于超寬帶測距技術設計了一套適用于重型汽車鐵路運輸的裝載定位系統,基于應用條件簡化了傳統超寬帶定位的基站配置,通過對稱雙邊雙向測距算法減小誤差提升系統精確度,為重型車輛鐵路運輸裝載提供了新思路。
參考文獻:
[1]黃永剛.重型汽車鐵路運輸裝載加固方案設計[J].重型汽車,2019,31(04):34-36.
[2]安迪,李可佳,胡淦,等.大型車輛鐵路裝載智能化引導系統研究[J].鐵道運輸與經濟,2018,40(07):122-126.[3]胡淦,李可佳,安迪,等.鐵路汽車裝載激光雷達技術應用[J].鐵道貨運,2018,36(08):54-58.
[4]李小亭,郎月新,韋子輝,等.基于改進雙向雙邊測距的超寬帶定位技術及應用研究[J].中國測試,2019,45(10):21-27.
[5]朱文剛,常海濤,薄云覽,等.基于超寬帶技術的軌道交通定位算法研究[J].計算機測量與控制,2019,27(07):218-222.
[6]趙紅梅,趙杰磊.超寬帶室內定位算法綜述[J].電信科學,2018,34(09):130-142.
[7]徐會彬,孫樹芳.基于超寬帶測距的定位精度及時延的研究[J].傳感技術學報,2019,32(05):735-738.
[8]林相澤,王祥,林彩鑫,等.基于超寬帶的溫室農用車輛定位信息采集與優化[J].農業機械學報,2018,49(10):23-29+45.
[9]王全輝,黃建軍,胡堅耀.超寬帶定位的AGV定位跟蹤算法研究[J].信號處理,2017,33(04):516-522.
