水下拖曳航行器水動力和拖纜姿態(tài)仿真分析
2020-09-10 07:22:44侯二虎杜敏汪小勇吳國偉秦玉峰
海洋開發(fā)與管理 2020年2期
侯二虎 杜敏 汪小勇 吳國偉 秦玉峰
摘要:水下拖曳航行器是被廣泛應用的水下監(jiān)測平臺。為掌握水下拖曳航行器的水動力及其拖攬姿態(tài),文章通過CFD仿真分析計算其零攻角下的阻力系數(shù),并通過多剛體-球鉸模型建立其運動數(shù)學模型,分析不同航速下拖曳系統(tǒng)的總拉力、拖纜長度和航行器位置等的參數(shù)變化。研究結(jié)果表明:隨著船舶航速的變化,拖曳系統(tǒng)各項參數(shù)變化的差別很大;在200 m深度時,6 kn航速相比4 kn航速的總拉力增加73%,而所需的拖纜長度僅增加1%。該數(shù)學模型可對不同航速下的水下拖曳系統(tǒng)的總拉力和拖纜姿態(tài)等做出預測,為拖曳系統(tǒng)設計提供技術支撐。
關鍵詞:水下拖曳系統(tǒng);拖纜;水下姿態(tài);仿真分析;航速
中圖分類號:P715.5 文獻標志碼:A 文章編號:1005-9857(2020)02-0074-04
Abstract:The underwater towing vehicle is a widely used underwater monitoring platform.In order to study its hydrodynamic and attitude prediction problems,the drag coefficient under the zero angle of attack of the aircraft was obtained through CFD simulation analysis,and the mathematical model of its motion was established by the “multi rigid bodyball joint” model,the parameters such as the total pulling force,the length of the cable and the position of the aircraft at different speeds were analyzed.The results showed that the different parameters of the towing system varied greatly with the ship′s speed changed.Under the depth of 200 m,with ship speed of 6 knots,the total pulling force of the towing system increased by 73% and the required length of cable increased by only 1% compared to ship speed of 4 knots.The mathematical model proposed in this paper can predict the total pulling force of the towing system and the shape of the cable at different speeds,and provide technical support for the design of the towing system.
Key words:Underwater towing system,Towed cable,Underwater attitude,Simulation analysis,Speed
0 引言
水下拖曳航行器亦稱水下拖曳系統(tǒng),被廣泛應用于海洋、內(nèi)河和湖泊的水下監(jiān)測,在水下環(huán)境調(diào)查和監(jiān)測中發(fā)揮多種用途。隨著海洋開發(fā)的日益深入,水下拖曳航行器發(fā)揮的作用越來越重要,海洋拖曳系統(tǒng)的相關研究成為現(xiàn)代海洋開發(fā)與應用的重要課題之一[1]。
拖曳系統(tǒng)通常由拖曳拖纜以及被動或可控的水下拖曳體組成,準確描述拖纜和拖曳體的水動力姿態(tài)是準確模擬拖曳系統(tǒng)水動力性能的關鍵[2]。皮德福等[3]通過建立拖曳系統(tǒng)水下拖纜的平面形狀和張力的二維數(shù)學模型,計算水下拖曳系統(tǒng)在不同航速下的姿態(tài);苑志江等[4]針對海洋拖曳系統(tǒng)建立運動計算模型,提取影響系統(tǒng)穩(wěn)定姿態(tài)的4個關鍵因素,并分析各因素對系統(tǒng)穩(wěn)定姿態(tài)的影響;楊智棟等[5]采用集中質(zhì)量法建立拖纜的運動方程,分析水下航行器運動過程中拖纜的長度及其作用力的變化;李志印[6]對水下拖曳系統(tǒng)的流體動力參數(shù)進行CFD分析,通過Fluent語言和Fortran語言的混編和對接,實現(xiàn)對拖曳體的水下動態(tài)模擬。本研究針對水下拖曳航行器的流體動力參數(shù)和不同航速下的拖纜姿態(tài)進行仿真分析,對不同深度下的運動工況給出所需纜長和拖纜姿態(tài)等結(jié)果,為水下拖曳系統(tǒng)設計提供技術支撐。
1 數(shù)學模型
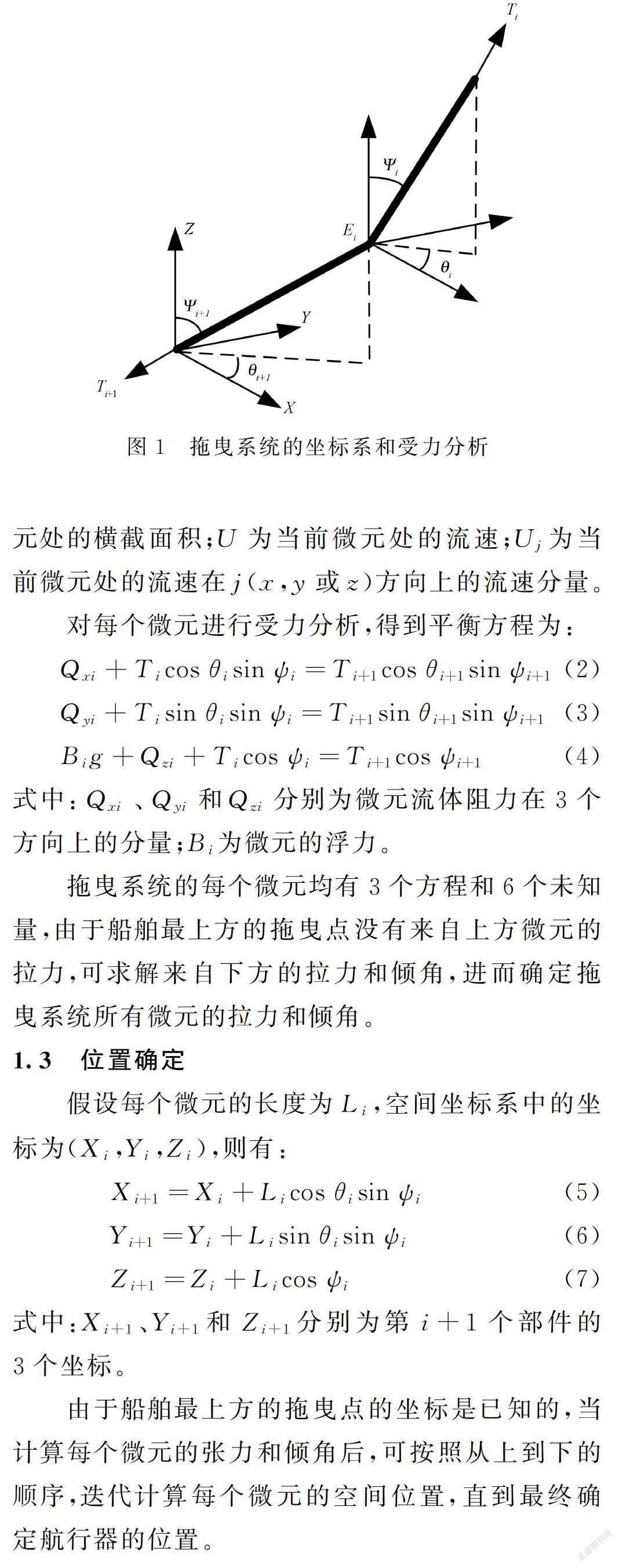
1.1 坐標系
由于航行器關于縱平面對稱,計算區(qū)域取航行器的50%,并采用對稱模型計算,計算區(qū)域長為35 m、半徑為5 m。求解器采用基于壓力式的定常算法。湍流模型為標準kepsilon模型,該模型是目前應用最為廣泛的湍流模型。近壁面處理選擇標準壁面函數(shù)法。海水密度視為均勻密度,即1 025 kg/m3。
在靠近航行器的區(qū)域采用加密網(wǎng)格處理方法,加密區(qū)域為包裹航行器的直徑為1 m的圓柱體,長度選取航行器的前1 m和后4 m,加密區(qū)域內(nèi)的最小網(wǎng)格間距為1 mm。
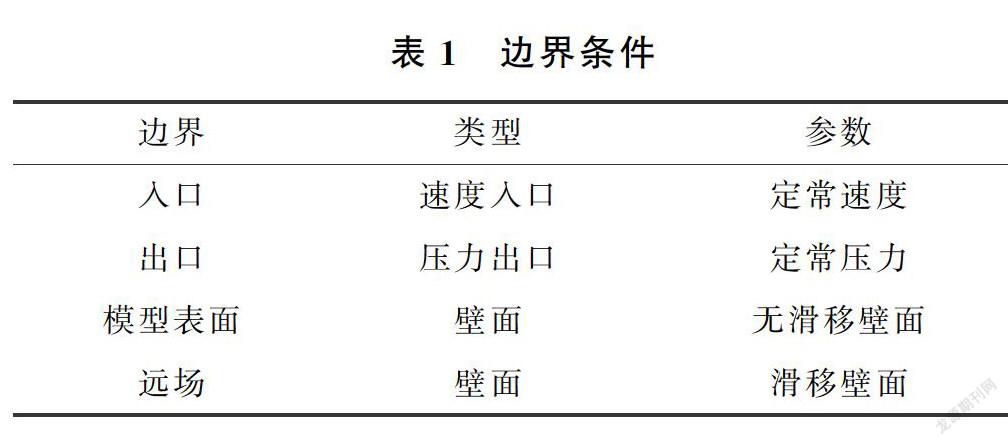
入口處邊界條件設為速度入口,出口為壓力出口[10],具體邊界條件設置如表1所示。
航行器在計算區(qū)域內(nèi)的計算工況為零攻角,采用航行器的50%進行仿真計算,得出所受阻力為26 N,全部阻力即為52 N,可得出航行器在零攻角下的阻力系數(shù)為0.17。
3 拖纜姿態(tài)
分別計算6 kn和4 kn航速的不同下放深度的拖纜姿態(tài)。未考慮海流速度,拖纜參數(shù)按鋼纜計算。下放深度分別為50 m、100 m和200 m,坐標原點位于海平面,船舶沿X軸正向航行,Z方向為水深,船舶拖曳點位于原點鉛垂上方5 m處。
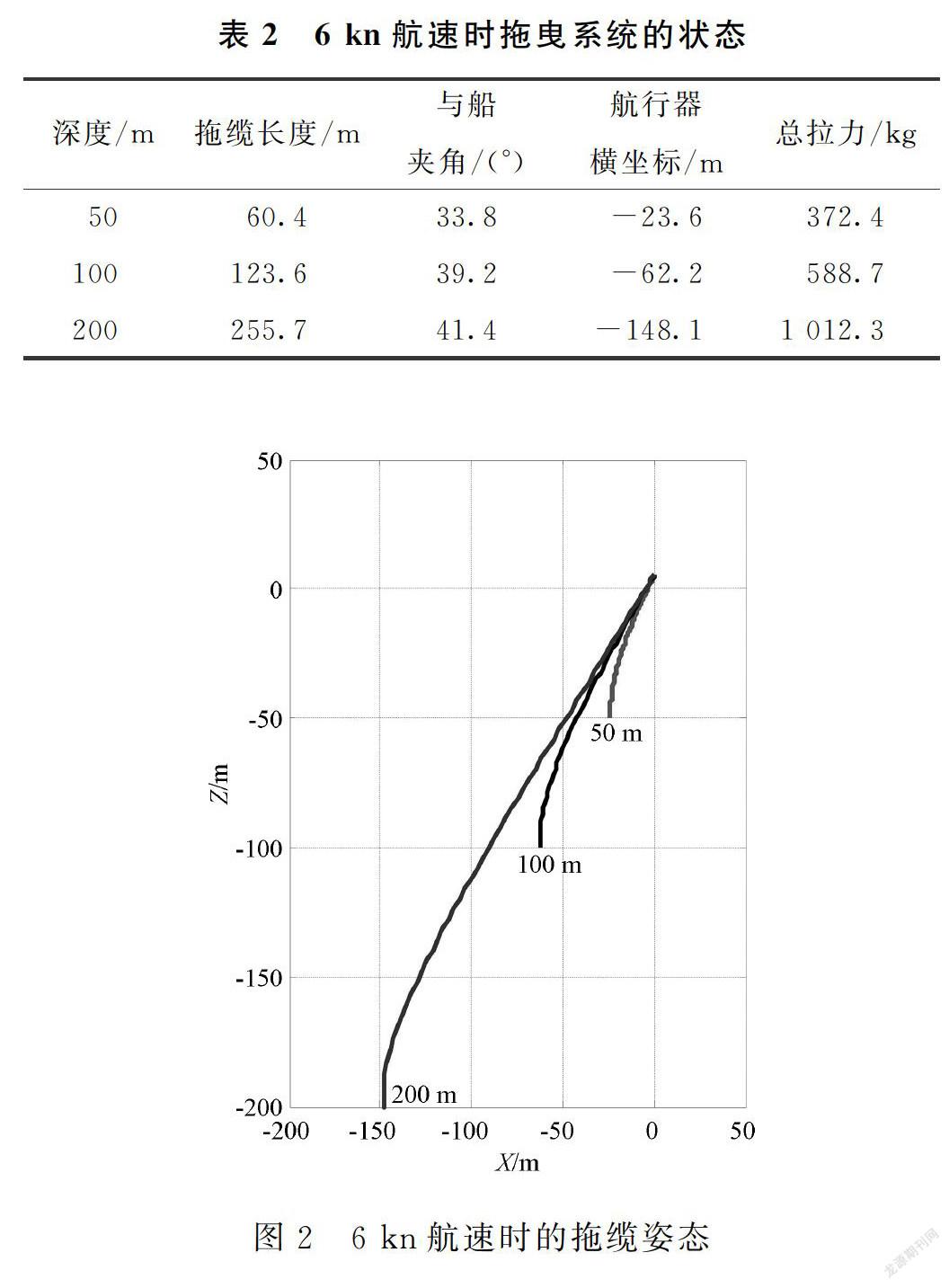
6 kn航速時拖曳系統(tǒng)的狀態(tài)如表2所示,拖纜姿態(tài)如圖2所示。
由表2可以看出,6 kn航速時,隨著航行器深度的增加,拖曳系統(tǒng)各部分的狀態(tài)均發(fā)生變化。由于船速的存在,所需拖纜的長度隨深度的增加而增加:50 m定深時,拖纜長度比深度增加20.8%;100 m定深時,拖纜長度比深度增加23.6%;200 m定深時,拖纜長度比深度增加27.9%。所需拉力也有很大幅度的增加,200 m定深時所需拉力比50 m定深時增加171.8%。變化程度最小的是拖纜與船夾角,200 m定深時夾角比50 m定深時增加22.5%。由圖2可直觀地獲取拖纜的最終姿態(tài),結(jié)合航行器的橫坐標即可確定航行器的最終位置。
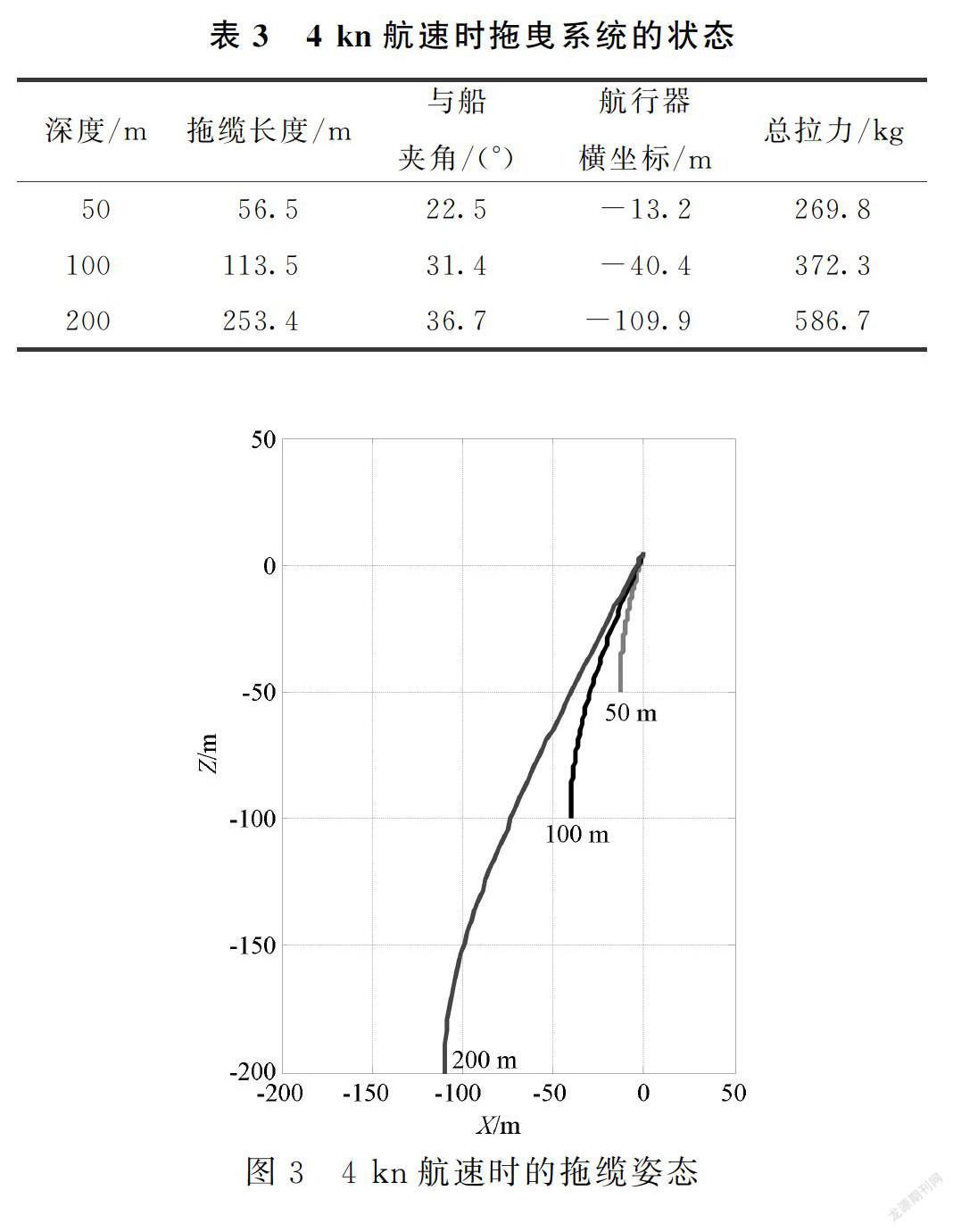
4 kn航速時拖曳系統(tǒng)的狀態(tài)如表3所示,拖纜姿態(tài)如圖3所示。
由表3可以看出,4 kn航速時拖曳系統(tǒng)的整體狀態(tài)與6 kn航速時類似。由于航速減小,拖纜長度、與船夾角和最終拉力等參數(shù)均有不同程度的減小。隨著深度的增加,總拉力由50 m定深時的269.8 kg增加至200 m定深時的586.7 kg,增加117.5%。拖纜長度在50 m定深時為56.5 m,相比深度增加13%,而在200 m定深時相比深度增加26.7%。
對比6 kn航速和4 kn航速下的計算結(jié)果可以看出,隨著航速的增加,船舶拖曳點處的總拉力和拖纜長度等參數(shù)均有變化。50 m深度時,6 kn航速比4 kn航速所需拉力增加38%,拖纜長度增加7%;100 m深度時,6 kn航速比4 kn航速所需拉力增加58%,拖纜長度增加9%;200 m深度時,6 kn航速比4 kn航速所需拉力增加73%,拖纜長度增加1%。3種深度下航行器橫坐標的增加幅度分別為79%、54%和35%,與船夾角的增加幅度分別為50%、25%和13%。因此,航速變化對拖曳系統(tǒng)總拉力變化的影響最顯著,且總拉力的增加幅度隨航速增加而增加,其余參數(shù)的增加幅度隨航速增加而減小。
4 結(jié)語
本研究建立水下拖曳航行器拖纜流體水動力和拖纜姿態(tài)的數(shù)學模型,并通過該模型對6 kn和4 kn航速下拖曳系統(tǒng)的姿態(tài)和受力進行仿真分析,研究結(jié)果表明:①隨著航速的增加,拖曳系統(tǒng)的各項參數(shù)均有所增加,但增加幅度不同,其中總拉力的增加幅度增加,而拖纜長度、與船夾角和航行器橫坐標的增加幅度減小;②總拉力的增加幅度非常明顯,在200 m深度時,6 kn航速相比4 kn航速的總拉力增加73%,而拖纜長度僅增加1%。
本研究建立的數(shù)學模型可對水下拖曳航行器在不同航速時的流體動力及其所處位置做出預測,為拖曳系統(tǒng)的設計工作提供技術支撐。需要說明的是,本研究僅針對勻速航行時的拖曳系統(tǒng),且將海水視作均勻密度的介質(zhì)。未來研究工作應考慮實際海洋環(huán)境的潮流、波浪、溫度和鹽度等因素的變化對拖曳系統(tǒng)的影響。
參考文獻
[1] 苑志江,金良安,田恒斗,等.海洋拖曳系統(tǒng)的水動力理論與控制技術研究綜述[J].科學技術與工程,2013,13(2):408-415.
[2] 李志印,吳家鳴.水下拖曳系統(tǒng)水動力特性的計算流體力學分析[J].中國造船,2007,48(2):9-19.
[3] 皮德福,宋保維,李正,等.水下拖曳系統(tǒng)穩(wěn)定姿態(tài)仿真計算[J].系統(tǒng)仿真學報,2005,17(10):2358-2359.
[4] 苑志江,金良安,遲衛(wèi),等.海洋拖曳系統(tǒng)穩(wěn)定姿態(tài)的影響因素研究[J].科學技術與工程,2013,13(5):1127-1134.
[5] 楊智棟,潘光,杜曉旭.變纜長拖纜AUV縱向運動建模與仿真[J].水下無人系統(tǒng)學報,2014,22(1):14-19.
[6] 李志印.水下拖曳系統(tǒng)的流體動力CFD分析[D].廣州:華南理工大學,2005.
[7] 陳永華.波浪驅(qū)動式海洋要素垂直剖面測量系統(tǒng)關鍵技術[D].青島:中國科學院研究生院(海洋研究所),2008.
[8] 姜靜波.海洋剖面測量系統(tǒng)形態(tài)模擬及仿真研究[D].青島:中國科學院研究生院(海洋研究所),2008.
[9] DEWEY R K.Mooring design and dynamics:a Matlab package for designing and analyzing oceanographic moorings[J].Marine Models,1999,1(1/4):103-157.
[10] 朱紅鈞,林元華,謝龍漢.Fluent流體分析及仿真實用教程[M].1版.北京:人民郵電出版社,2010.