汽車電子增壓器控制系統研究
2020-09-10 07:22:44刁一峰
內燃機與配件 2020年13期
關鍵詞:汽車
刁一峰

摘要:電子增壓器是提升汽車性能的關鍵元器件,本文結合多年工作實踐,闡述汽車電子增壓器控制系統的結構,并且基于汽車安全行駛的要求,結合電子增壓器控制系統原理提出一種基于KD.TCU的電控系統,以此滿足我國汽車電子增壓器裝置性能發展的要求。
關鍵詞:汽車;電子增壓器;控制系統
0 ?引言
隨著我國汽車技術的不斷發展,尤其是環保工作對汽車性能的要求日益嚴格。降低汽車污染排量、提高汽車動力是汽車行業發展的主要趨勢。實踐證明提升汽車發動機性能的關鍵手段就是利用電子增壓器,同電子增壓器達到調整控制供氣量,實現汽車進氣量與排氣量的有效匹配,達到精準燃燒的目的。相比于傳統的增壓技術,電子增壓器實現了無需與發動機進行機械連接,因此電子增壓器不僅具有安裝自由度高的優勢,而且還不需要對發動機排氣端進行改變,達到了增壓器的快速響應。基于電子增壓器的優勢,發揮電子增壓器功能關鍵就是要設計完善的控制系統,因此本文設計KD-TCU電控系統,并且通過檢驗驗證了其能夠達到精準控制電子增壓器,滿足發動機的實際需求[1]。
1 ?電子增壓器電控系統的結構概述
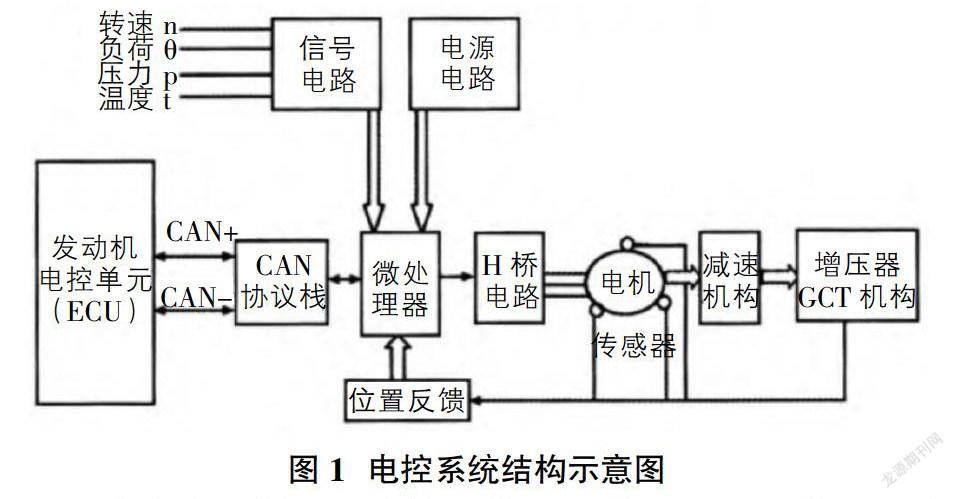
電子增壓器電控系統見圖1所示。電子增壓器電控系統是實現對汽車發動機進氣自動控制的關鍵系統,其主要是通過對汽車變截面噴嘴環口流通面積調節結構的運動,以此改變進入汽車氣流的流量。根據其結構圖可以看出電控系統主要包括CAN總線通訊接口電路、微處理器、電源調節電路以及位置信息反饋電路等等。
本文電子增壓器電控系統需要滿足以下要求:一是要保證電子增壓器電控系統具有耐高溫的特點,因此需要采取高精度的32位微處理器的集成電路,這樣可以適應電控系統高精度的控制性及對系統的適應性要求;二是具有加強獲悉控制指令的功能,能夠對控制指令做出最快的響應。目前控制系統獲取指令的方式主要有兩種:一是電控系統在獲得發動機等參數值后,電控系統會利用系統的控制模型發出對驅動機構的運動指令;二是利用主控制算法將其放在ECU中,經過計算機ECU直接計算出最佳增壓器葉片開度位置,以此發出控制指令;三是強化對執行機構的優化設計,縮短運動相應的時間;四是采取PID位置閉環反饋系統,以此保證執行的精度。同時為了保證控制系統的穩定性,防止故障發生后出現適應性不強的問題,需要開發設計多種故障處理程序,以此保證系統的可靠性。
2 ?電控系統的研究及設計
2.1 控制策略
電子增壓器使用的關鍵就是要提高發動機的性能,而增加發動機性能的關鍵就是通過增壓器實現對進氣量的調整,以此保證發動機充分燃燒。目前電子增壓器的控制參數有3種:增壓壓力、噴嘴開度位置以及增壓器轉速。實踐證明在發動機和增壓器參數確定的環境下,三種控制參數均與進氣量有對應關系,但是其精度不同。增壓器控制方法有很多種,例如控制算法雖然實現了精度高的要求,但是其系統比較復雜。位置控制方法雖然MAP的制取工作量比較大,但是其葉輪轉速控制方法比較簡單,瞬間響應比較快,因此本文采取位置控制方法。
KD-GCT增壓器采取的是雙組葉片噴嘴結構,為了提高測量傳感器的精度,檢測執行機構的末端轉軸角度代表噴嘴位置。具體的操作算法為當汽車處于穩態工況下電子增壓器控制系統采取閉環的數字式PID算法,當汽車處于加速或者減速工況時,為了提高相應的速度采取前饋控制作為PI的補充[2]。在判斷控制算法時主要是根據發動機的工況進行判斷,例如當冷怠速時,為了降低冒白煙等現象,需要將噴嘴葉片置于最小開度。
2.2 位置閉環反饋控制系統
位置閉環反饋控制系統工作原理見圖2所示。其主要是當電子增壓器微處理器發出控制信號后,通過閉環反饋系統判斷執行機構是否執行到位。
2.3 總線通訊及信息反饋
電子增壓器控制系統需要接受與反饋發動機指令信息,因此控制系統比需要設計總線通信系統。本文設計的電子增壓器采取CAN總線控制方式,其控制標準嚴格按照我國相關的行業標準進行。因此根據電子增壓器工作原理,發動機電子增壓控制系統設計為享有優先權,與電子增壓器形成統一整體,具有獨立工作的功能。控制系統在接受到發動機指令后,對指令進行解析,然后計算軸的轉動角度,并且將信息傳遞給驅動電路,以此達到控制發動機進氣量的目的。
2.4 直流永磁電機控制
增壓控制的動力來源是增壓器控制系統所必須要解決的,直流無刷永磁電動機在現代汽車制造領域得到廣泛的應用,其具有運行效率高的優點,但是其存在轉交控制難的缺陷。因此在KD-TCU控制系統中用開關型霍爾集成電路,這樣可以準確的對位置信號進行判斷,以此達到精準控制電機的目的[3]。
另外基于對故障保護的處理,需要設計故障處理及補償算法。例如在增壓器控制系統通電以后,系統會自動檢測各器件的狀態,通過軟件系統的自檢實現對各個元器件性能的診斷。
3 ?執行器的研制
通過研究分析,本次設計的KD-TCU電子執行器主要包括兩種型號:一種是自控型,自動型包含了上述所有的控制策略,當然自控型需要執行器要對發動機的所有參數,例如溫度、大氣壓力溫度、負荷以及轉速等信息進行全面的掌握,而這些信息參數可以通過CAN總線獲悉。當然還可以通過傳感器測量或許;二是從控型。從控型就是電控單元只是接受發動機發出的指令信息,通過對指令信息解析后進行操作。
3.1 執行器基本技術參數
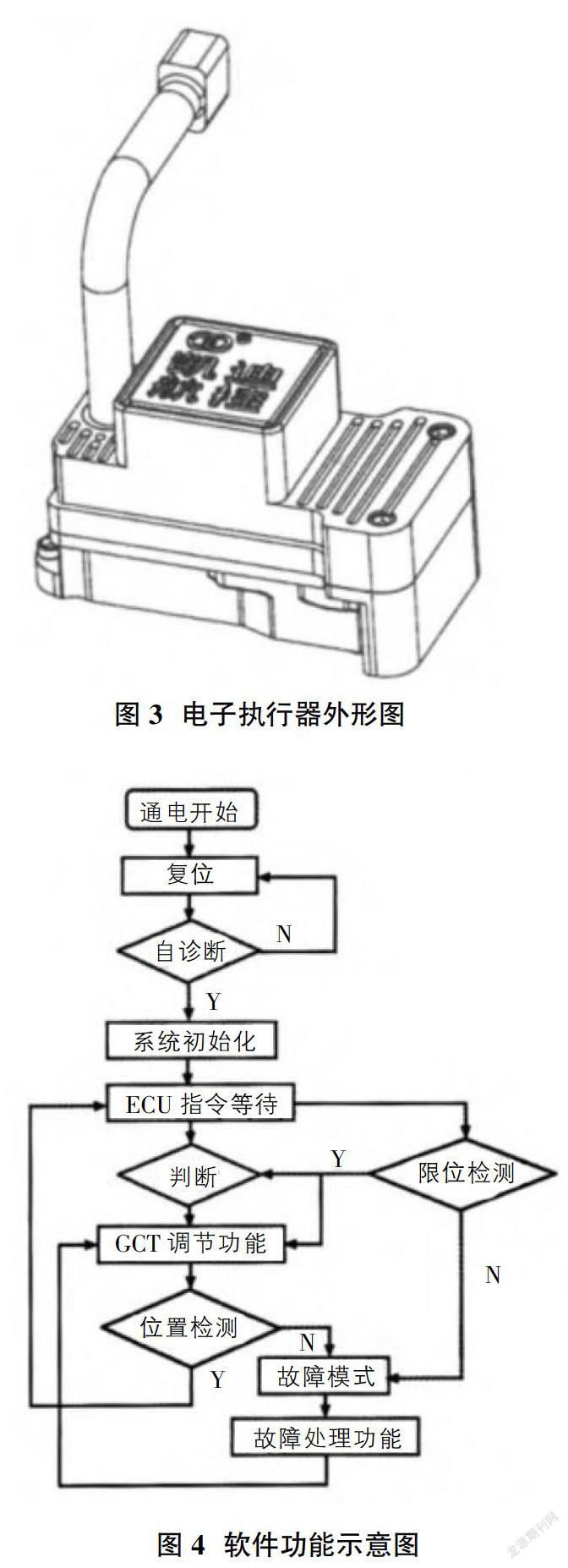
執行器是控制系統的關鍵元件,其外形結構見圖3所示。執行器的基本參數為:輸出扭矩大于8Nm;平均運動速度大于0.25m/s;平均電流消耗小于1.5A;重復位置精度±2%;響應時間小于500ms;工作溫度為一40~+125℃,符合IS016750--2010《道路車輛安全及電子設備的環境條件和試驗》標準要求。同時基于電子增壓器設計原理的指令,為了減少空間占用,執行器采取電機驅動的方式,一級主動輪和電機轉子采取一體結構,這樣滿足位置控制算法的要求。具體的設計位置就是在輸出末端設轉角傳感器,這樣便于位置反饋[4]。
3.2 控制程序的設計
控制程序以控制策略和算法為基礎進行設計。執行器配用的控制程序主要包括寄存器配置、硬件初始化、中斷調用、數據通信、故障診斷及處理、補償等幾大模塊[5]。基本的控制軟件功能示意框圖如圖4所示。
為了檢驗電子增壓器控制系統的穩定性與安全性,對其進行多次試驗,并且將其與SD493發動機進行了匹配試驗,經過試驗對比本文設計的電子增壓器控制系統在發動機功率、油耗、煙度等指標上都要高于普通的電子增壓器控制系統的性能,因此基于KD-TCU的電控系統具有較高的穩定性與實踐應用性,能夠滿足多種工況的要求。
參考文獻:
[1]謝云臣,施永強.車用可變截面增壓器電控系統KD-TCU的開發[J].現代車用動力,2017(1).
[2]劉青林,顏丙輝.電子增壓器對增壓小型化發動機性能改善研究[J].內燃機,2017(4).
[3]馮浩,秦博,林思聰,孫云龍.電子增壓器對增壓米勒循環汽油機性能影響的試驗研究[J].汽車工程,2019(7).
[4]江蘇凱迪航控系統股份有限公司.《雙葉片噴嘴系統的渦輪增壓器》項目鑒定資料[Z].北京:中高科鑒字[2014]第214號,2014.
[5]石偉.可變噴嘴渦輪增壓器控制算法的研究[J].企業技術開發,2016(4).
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50