汽車主動懸架系統的控制技術探析
2020-09-10 03:04:59孟源
內燃機與配件 2020年1期
摘要:懸架系統作為汽車底盤的主要組成部分,它的性能直接影響到車輛的平順性及操作穩定性。本文對主動懸架系統不同的控制技術進行了整理,而各種不同的控制技術并不獨立,各自之間有一定的關聯。目前懸架系統由原來的被動懸架技術向主動懸架系統進行轉移,本文為研究主動懸架系統的人員提供一定的參考。
關鍵詞:主動懸架系統;控制技術;應用
0 ?引言
人類文明的進步促使著人類對生活質量的要求越來越高。對于中國制造而言,也提出了進一步的要求,由之前可簡單實現功能轉為更精確的、更智能的實現該功能。繼2007年開始以來,中國的年汽車銷售量及全國汽車擁有量變為全球第一,在這樣一個龐大數量的影響下,也對該行業提出了更高的性能質量要求,其中的影響指標有平順性、舒適性等,而為了提高這些性能指標,我們在懸架系統中應用了一些電控技術。
對于懸架系統,通過專家們的理論分析、模擬仿真、工況測試等理論結合實際的方法,懸架系統逐漸的從純機械控制到電控再到人工智能。現在我國電控懸架系統即主動懸架系統的技術越來越成熟,那么下邊我們對主動懸架系統中所涉及到的技術及應用做出淺談。
1 ?汽車主動懸架系統的分析
車輛穩定性及平順性難以在傳統的被動懸架系統中達到一種最佳狀態,而主動懸架系統可相對達到這一最佳狀態。主動懸架系統中包含了傳感器、電子控制單元及執行器。傳感器可以將車速及車身高度以電信號的形式傳回電子控制單元,通過電子控制單元的邏輯分析(依據控制算法理論)讓相關執行器去進行工作以達到最佳的運行狀況,主動懸架系統可以根據不同的工況去進行實時的、精確的控制阻尼力及彈簧剛度,從而保證運行過程中的平順性及操作穩定性。主動懸架系統一般只運用在較高檔的汽車中,常采用空氣彈簧(通過在橡膠氣囊彈性元件中充、放不同量的空氣來改變該元件的剛度)。
市面上較為便宜的車中常采用被動懸架技術,這種線性控制技術,主要由剛性彈簧和液壓減振器組成,剛性彈簧主要起連接和導向作用,振動能量主要由液壓減振器中液壓油流過閥芯所產的阻尼力來吸收掉。該技術相對比較成熟,造價較低;弊端就是相關參數一旦確定之后無法改變,在大部分工況中無法同時滿足平順性及操縱性要求,直接影響車輛運行的整體性能。
由于主動懸架系統結構復雜,造價高,并且其消極懸架系統滿足不了所有工況的要求,所以在一些客車上常采用半主動懸架系統。該系統具有比較好的靈活性,其主要通過彈簧壓縮量來測算車速,最終來選擇合適的剛度值及最優阻尼力,其結構組成和被動懸架系統一致,只是減振器的閥芯口徑可以改變,通過其改變來控制阻尼力的大小,完成最優控制。
根據所了解的文獻中得知,雖說輪胎的垂向阻尼特性在絕大多數工況下對輪胎的垂直剛度影響很小,但在汽車極限的特殊工況下還是有一定的研究價值。一些專家提出了輪胎阻尼特性影響簧上質量,在理想工況下可以將簧上質量的垂直加速度值降低約百分之三十。而汽車懸架系統是主要影響汽車平順性、穩定性及舒適性的結構。懸架系統設計的好壞會影響到懸架動變形量、車體垂直加速度及輪胎動載荷。大量的文獻表明主動懸架系統能減小車輛的垂向振幅、具有更小的功率譜密度從而實現更好的運行平順性及操作穩定性。
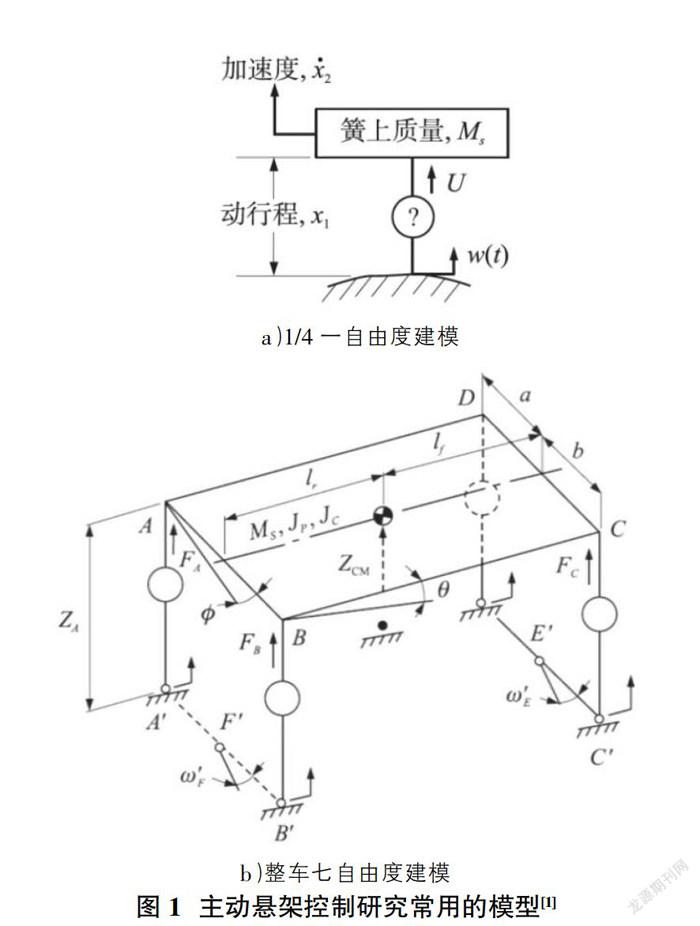
關于主動懸架系統的理論性研究是從1/4一自由度建模逐漸到整車七自由度建模,雖說1/4一自由度建模具有很大的局限性,但由于其簡單,故而在設計一些新的懸架系統中廣泛應用。建模如圖1所示。
2 ?控制算法在汽車主動懸架系統的應用
汽車主動懸架系統中包含有電子控制單元,而它是要通過傳感器實時感知并傳送車輛運行的實際工況,進而進行數據分析及相關運算,這種運算就是依據于文中提到的控制算法,該控制算法包含了自適應與自校正控制、模糊控制、神經網絡控制、預見控制、隨機線性最優控制、魯棒控制。也就是運用不同的控制規律和模型所對應出來不同的懸架特性,從而選出對整車平順性及操作穩定性最優的一種。
2.1 隨機線性最優控制 ?隨機線性最優控制是由于路面對車輪的激勵是一隨機過程,他的理論依據就是線性二次高斯控制,由于其不必知道要求的性能參數去明確閉環極點所處位置,可以通過響應曲線得知最佳狀態及控制變量的相關數學模型,得出輸出參數,故而大多采用在控制策略的設計當中。該數學模型的建模一般是依據于工作經驗所得,由于輸入參數的種類比較多,所以也對技術管理人員提出了更高的要求,要求其對輸入參數進行解析,最終實現減振效果的提升。在達到最優控制之后,還應該及時地對該系統的反饋進行收集并作出進一步優化升級,進一步去完善該系統的性能。
2.2 模糊控制 ?隨機線性最優控制是依據于經驗進行建模,該模型較為復雜,控制效果不是很理想,而模糊控制不需要建立太精確的模型,所以也減小了建模時所產生的誤差,把多個變量參數進行了范圍規定,所以應用該控制技術可以減少電子控制單元的存儲空間,費用降低。該系統可以提高響應效率,使得控制更加高效,但控制不是很精確。文獻中查得使用該控制技術,即使車輛運行在極為不平整路面時,懸架的可靠性較好,同時執行器也在可靠地工作范圍內。所以該控制技術在汽車設計中廣泛采用,同時有利于人工智的優化。
2.3 神經網絡控制 ?該控制技術在人工智能時代逐漸引起人們的重視,該技術是一種具有并行分布式特點的處理系統,可以像人類一樣進行分析處理問題,它可以獨立的通過傳感器進行知識的獲取,分析這些知識有無關聯性,把具有關聯性的知識進行存儲記憶,故而他有良好的自適應性、容錯性及推理能力。該電子控制單元通過一次次的學習可以提高該單元的推理分析能力,從而使得主動懸架系統的控制越來越趨于期望值。該技術有著很優越的減振效果,也有著很大的發展空間,廠家技術人員通過對行駛工況進行數據積累及分析,極力地提高該技術的控制優越性,使該技術得到更廣泛的應用。
2.4 自適應與自校正控制 ?自適應與自校正控制技術是將傳感器搜集到的信息傳輸到電子控制單元中,然后與寄存器中存儲的參數中選擇與當前傳輸進來最接近的參數,然后對執行器進行控制。正常情況下,該技術可依據不同的輸入參數進行自適應調整及控制,但在較復雜工況時,該技術控制精度不高,運算較為復雜,而為實現較為精確地控制,寄存器中存儲信息量較為龐大。而輸入的參數受路面激勵及車輛自身參數變化的影響,所以輸入參數不能及時、精確地輸入,故而在實際復雜的工況下,該控制技術下的電子控制單元的控制精度及響應性會極大地降低。
2.5 預見控制 ?該控制技術是采用超聲波傳感器提前獲知運行前方路面譜信息,由于電控單元提前獲知路面參數,就可以提前進行數據分析,提前響應,也能提高控制精度,該控制技術在汽車上沒有得到廣泛應用,但在列車系統進行了運用,效果也較為顯著。
2.6 魯棒控制 ?該控制技術是對上述控制方法所存在的缺陷如數學模型誤差、輸入參數實時變化等進行改進,是對控制系統保證閉環回路穩定的條件下對其不確定性進行優化處理,文獻中也提到了,無論是1/4一自由度模型還是整車七自由度模型在采用魯棒控制技術之后都提高了輸入參數的精度從而完成執行器的精確控制。
3 ?結束語
汽車主動懸架系統所面臨的挑戰依然很多,實現人工智能的路程還很遠,需要大量的路試數據的積累,同時還受制造成本的約束。從長遠來看,主動懸架系統需要在傳感器技術、電子控制單元技術及智能執行器之間進行完美的結合才能更好地實現車輛平順性及穩定性。
參考文獻:
[1]Hrovat D.Survey of advanced suspension developments and related optimal control applications[J].Automatica, 1997,33 (10): 1781-1817.
[2]趙永強,何長安.基于神經網絡自適應控制的主動懸掛系統[J].計算機仿真,2003,20(1).
[3]陳鑫,蘭鳳崇,陳吉清,等.微型電動汽車懸架系統設計與平順性分析[J].重慶理工大學學報(自然科學),2018,32(8):24-31.
[4]桑楠,魏民祥.車輛主動前輪轉向與主動懸架的自抗擾控制方法[J].南京理工大學學報,2017,41(2):165-172.
[5]王紅,邱官升.汽車電控懸架系統檢修關鍵技術研究[J].技術交流,2019,35(6):153-155.
[6]來飛,胡博.汽車主動懸架技術的研究現狀[J].南京理工大學學報,2019,43(4):519-526.
[7]黃鎮財.汽車懸架系統電控減振技術應用探析[J].內燃機與配件,2019,19:38-39.
[8]陳鵬.汽車懸架系統電控減振技術及應用[J].時代汽車,2018,296(05):119-120.
[9]劉海妹,倪彰,貝紹軼,等.電動汽車主動懸架系統阻尼可調減振器設計及固有頻率試驗[J].西南大學學報(自然科學版),2017,39(10):147-154.
[10]王瑩.汽車主動懸架系統及其魯棒控制研究[J].廣東工業大學,2005.
基金項目:天地科技創新創業資金專項(2018-TD-QN035)。
作者簡介:孟源(1988-),男,山西太原人,碩士研究生,講師,2014年畢業于太原理工大學,長期從事車輛底盤等方面的教學及科研工作。
猜你喜歡
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(2017年4期)2017-02-06 05:27:06
考試周刊(2016年76期)2016-10-09 08:45:44
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
科技視界(2016年20期)2016-09-29 11:02:20
大眾理財顧問(2016年8期)2016-09-28 13:45:18
照明工程學報(2016年3期)2016-06-01 12:17:56