石油鉆機管具運移裝置自適應機械手設計研究
2020-09-11 14:41:02董方杰
河南建材 2020年8期
王 琛 董方杰
勝利油田利豐石油設備制造有限公司(257000)
海洋鉆井平臺很早以前就開始采用鉆桿排放裝置,但由于嚴重的波浪、惡劣的工作條件、安全問題和高昂的鉆井成本,因此目前研究定位都放在加快施工鉆井速度和縮短鉆井周期方面。針對這種現象,很多國家開始研發自動化機械裝置,利用自動化機械設備代替手動操作,從而實現人與鉆桿分離,鉆桿自動發射。 除了鉆孔操作之外,還可以通過遠程控制、自動變速器和鉆桿自動排放等操作節省大量鉆孔時間。
1 排管機夾持機械手概況
國外有一種自動化程度很高的鉆機,采用了一種可以將平臺下的鉆桿直接輸送到井口的裝置,這種裝置使用了機械手。鉆井平臺上的鉆桿垂直排水系統使用DEU 技術, 機械手采用液壓驅動方式作業。 機械手由分布在四個位置、結構相同的夾緊臂組成,通過四個夾緊臂保持穩定的夾持作業。
目前,大部分鉆井平臺采用立桿連接方式鉆井,鉆桿布置在平臺根部箱上方,排管機械手的規模相對較小。如圖1 所示的Iron Derrickman 排管機夾持機械手,其組成結構比較小,可以很容易地從排管機的底箱中取出目標立桿,最多可容納5.443 公斤的鉆桿。
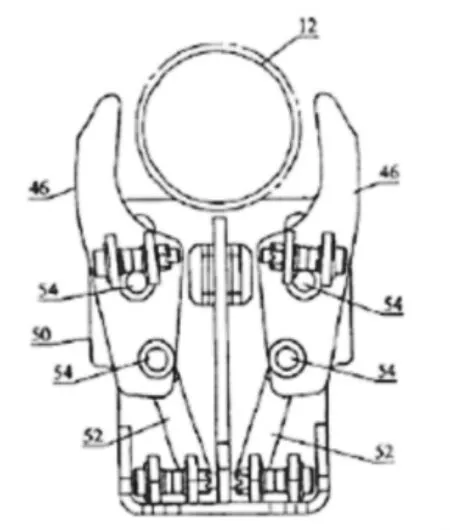
圖1 Iron Derrickman 排管機夾持機械手
2 夾持機械手的設計要求
2.1 工程概況
本工程采用排管機械手,旨在為萬米大陸科學鉆探工程提供設備,科學鉆探工藝采用上驅動鉆機與轉臺交替的工藝,鉆探工藝采用連接立桿工藝,立桿存儲在立桿箱中,需要排管機垂直排出的桿和鉆孔柱較多。 因此,機械手必須經常進行夾持作業,以滿足萬米大陸科學鉆探的管道器具處理要求。
文章采用的是SPKZ-1 型鉆機的三維模型,兩層鉆機的指梁框架之間的間距很小。 當所有的直立桿放置在指梁框架中時,直立桿被垂直排出(傳統的手動排出是直立桿的傾斜排出),直立桿與直立桿之間的間距很小。 為了從直立桿簇中夾緊和取出目標直立桿,排管機的操縱器必須結構緊湊,并且不能干擾其它直立桿。 另外,目前鐵鉆工在連接立桿時需要頂驅和后夾的配合,動作多,消耗的時間也很多。 因此,在本設計方案中,也要將排管機機械手的旋轉自由度考慮進來,只有這樣才可以與鐵鉆工配合完成立桿動作。
2.2 機械手設計的主要難點和需要滿足的要求
①工作環境惡劣,通常是在野外,有強風;②機械手結構小巧,可以便捷地安裝在排管機上;③設備的鉆桿重且長;④工作條件惡劣,鉆桿被泥漿和油覆蓋,這進一步增加了鉆桿的重量和表面平滑程度;⑤機械手必須能夠夾持萬米科學鉆探項目中使用的所有鉆桿和鉆頭;⑥為配合鐵鉆工的運動需求,需要采用自由旋轉工藝;⑦由于鉆桿自動排放系統是全自動裝置,要求機械手動作準確、反應靈敏。 從以上情況可以看出,這種鉆桿夾具對強度和穩定性的要求比普通夾具更高,鉆桿夾緊鉗的研制是實現鉆桿排放全自動化的關鍵一步。
2.3 排管機機械手具有的優勢
①結構設計相對合理,能夠完成基本的夾緊和站立動作;②夾桿動作穩定,對桿的損傷小;③夾緊架的轉動自由度較高,可與鐵鉆工配合完成連接和斷開支架操作;④系統各部分連接準確,機具匹配度高;⑤系統部件易于拆卸和更換;⑥通過壓力傳感器和感應式接近開關,壓力液控可以自動判斷機械手和鉆桿的相對位置,自動控制夾緊動作。
在機械手的設計過程中,除了上述設計難點以外,還必須考慮將機械手作為一個部件安裝在排管機上,機械手的設計也取決于排管的功能設計。 機械手的參數選擇還應考慮輔助操作中排管的工藝過程。
3 排管機夾持機械手的設計方案
3.1 排管機設計注意事項
①操縱器和排管系統各部件之間的相對運動和相對位置;②機械手的外形尺寸、長度、寬度和高度以及各部分的外形尺寸;③所有部件的連接、協調和相關位置尺寸。 如兩層平臺指梁和排管架桅桿部分之間的間距以及表面尺寸等。
3.2 排管機夾持機械手的設計
采用橢圓活塞氣缸,使機械手的結構更小。 當活塞桿向前移動的時候,兩個夾爪的下端沿凸輪桿的弧面移動,使夾爪鎖定。 在現有結構中,當液壓缸的活塞桿返回時,兩個夾爪不能打開。 為了連接鉗口,有兩種設計方法:一種是在夾爪之間設置一個彈簧,這樣兩個夾爪下端的滾輪就能始終固定在凸輪桿的弧面上,彈簧主要是在回程時起作用;另一種是設計兩個連接板,分別連接夾爪和凸輪桿。 如果設置彈簧,則在夾緊大型鉆柱并使其立于基礎上時,會經常使用夾緊動作,并且容易引起彈簧疲勞;如果彈簧損壞了,那就更危險了;如果為彈簧提供保護套,機械手的整體尺寸將會增加。 如果設置連接板,連接板太薄不能提供足夠的回復力,太厚將增加機械手的整體尺寸。 此外,夾爪上的滾輪安裝方法會降低夾爪上滾輪安裝位置的強度。

3.3 排管機夾緊機械手零件的布置
機械手三個夾緊位置的軸上分別安裝有軸套,使機械手具有轉動的自由度,并能配合鐵鉆工的動作。 應對軸套表面進行處理,以提高其與鉆柱的摩擦力。 通常,摩擦力可以通過滾花套筒表面來改善。然而,在鉆井過程中,鉆桿被泥漿和油覆蓋,這進一步增加了鉆桿的重量,使表面更加光滑。 摩擦力的減小將導致鉆桿在夾緊過程中掉落, 甚至導致事故,尤其是在鉆柱旋轉過程中。 因此,應提出增加摩擦力的處理方法。
鐵鉆工具有多種動能,并且屬于一種安全高效的鉆具擰緊裝置。 主要完成鉆桿接頭螺紋的裝卸、千斤頂的裝卸、鉆桿的投擲、井下工具的移動等功能。 為了使排管機與鐵鉆工配合進行連接和斷開鉆桿的操作,這種設計增加了機械手的旋轉自由度。彈性墊片、鉗子或滾輪通常用在機械手的夾具中,以提供機械手夾持鉆桿所需的閥座擦拭力。 為了提供旋轉自由度,機械手的夾持器有兩種設計方案,一種是使用滾輪和軸承座,另一種是使用固定軸和軸套的組合。 一般來說,當使用滾子和軸承座時,設計轉速較高,而當在鐵鉆工中進行旋擰或擰下時,設計轉速為80 r/min (吉林大學建筑工程研究所設計的單扣鐵鉆工),因此采用固定軸加軸套的方式來增加摩檫力。
3.4 機械手的工作過程
排管機配有兩個結構相同的機械手, 同步夾緊。 機械手有兩個夾爪與一個定位塊,夾爪和定位塊上分別安裝有夾塊,油缸的活塞桿分別與夾爪和定位塊連接。 定位塊和兩個夾爪通過兩個相同的連接板連接,油缸的活塞桿向外伸出,帶動兩個夾爪和定位塊, 使三個夾塊徑向向內移動相同的距離,夾緊立桿時具有較好的定心。 并且這部分的夾緊塊是固定在兩個夾爪和定位塊的軸上的滾花軸套,這樣在夾緊立桿時可以保持旋轉自由度,從而與鐵鉆工配合完成立桿的連接和斷開動作。 該系統采用負載敏感型的液壓系統,可根據立桿的重量來自動調節夾緊力,避免夾緊力過大對鉆桿表面造成的損壞。
4 結語
排管機夾持機械手可以提高工作效率,減少工作耗時。 但由于排管機夾緊機械手的工作頻率高,易疲勞損壞,夾具應可快速更換;如果夾緊力過大,鉆桿表面會磨損。 如果這些問題得不到解決,將無法充分發揮排管機的優勢,甚至使鉆桿在夾緊狀態下產生更大的磨損和變形,從而影響鉆桿的壽命。因此,可以采用文章的設計方案來增加摩擦力并減少鉆桿的磨損,從而將排管機的性能發揮到最大。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
Coco薇(2017年5期)2017-06-05 08:53:16
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41