基于機器視覺的工業機器人分揀技術實踐
2020-09-12 03:18:42陳帥華
科學咨詢 2020年25期
關鍵詞:系統
陳帥華
(重慶城市職業學院信息與智能工程系 重慶 402160)
目前,國外對機器人本體的研究已經相當成熟,具有運動速度快和控制精度高的特點。現在機器人的外圍設備是研究的熱點,將視覺傳感器或觸覺傳感器和機器人本體相結合,配備以功能強大的應用軟件程序,可實現機器人的智能化控制。對于分揀機器人來說,現有的配套視覺軟件可以引導機器人進行準確快速的分揀作業,但是關于應用軟件涉及到的核心技術屬于商業機密,仍然處于嚴格保密狀態。
國內很多學者針對分揀作業中的具體問題進行深入研究。例如,針對分揀工作環境惡劣的情況下,如何避免粉塵對攝像機的干擾;針對分揀中圖像準確識別問題進行細致研究,從而提高分揀的準確率;針對傳送帶上目標坐標點的預測及獲取進行分析,為能夠快速分揀提供必要前提;針對特定分揀目標進行專一化的分揀設計。
一、機器視覺下的機器人分揀系統構建
為了探討機器人分揀技術,現以廣數機器人為例,基于機器人視覺構建一個機器人分揀系統,并對該系統在相機靜止-目標靜止,相機靜止-目標運動兩種情況下的運行情況[1]。
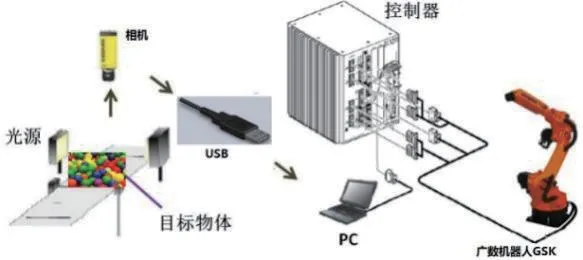
圖1 視覺分揀機器人系統示意圖
(一)機器人分揀系統的構成
基于機器視覺的工業機器人分揀系統的總體方案,機器人分揀系統由五個單元構成,分別為工作平臺單元、視覺分揀單元、攝像機平臺單元、機器人RC單元以及機器人機械手抓單元等五個部分。圖像處理的作用是對相機拍攝到的外界圖像進行預處理,提取圖像中的某些特征,并根據這些特征來確定出聯通成分的中心坐標;相機標定的作用是為系統建立一個圖像坐標系與機器人坐標系,并以此來研究二者之間的關系[2];模式識別需以圖像作基礎,對圖像及圖像中的聯通成分進行識別、分類;機器人控制是最后步驟,控制的實現方法是在計算機和機器人之間建立一個連接通信。

圖2 機器視覺的工業機器人分揀系統
視覺分揀單元由PC機和視覺軟件組成。主要是由視覺系統對攝像機采集的視頻序列識別目標種類。再計算出工件的中心和擺放的方向。最后要根據圖像坐標系和物體坐標系的關系,經過計算目標的相對位置和方向,將信息參數傳入控制柜中。
(二)相機的標定
廣數工業機器人控制柜提供RJ45 接口,PC機與工業機器人控制柜通過網線連接,工業攝像機通過USB與PC機連接。機器人示教盒用于對工業機器人進行編程。系統包括兩個子系統:工業機器人控制系統,視覺系統。視覺系統包括:工業攝像機,PC,分揀工作平臺[3]。
攝像機標定的方法分為兩大類,一類是傳統的攝像機標定方法,另一類是攝像機自標定方法。傳統的攝像機標定方法比較簡單,使用待標定的攝像機拍攝已知形狀.尺寸的標定模板,標定模板可以為棋盤格模板、網格紙模板等。通過已知位置的圖像點與空間點解算出標定模型中的未知參數,從而完成攝像機的標定。自標定方法不需要使用特定的靶標,以場景中位置未知的點作為參考點,攝像機通過特定的運動獲得場景點圖像,從而完成攝像機的標定。

圖3 相機采集標定靶標圖
機器人分揀中,通過對相機標定結果的分析,可準確判定目標在機器人坐標系中所處的位置,為機器人的分揀和抓取動作奠定基礎[4]。
(三)分揀實現過程
首先對目標工件進行圖像預處理和特征提取,然后利用圖像矩特征完成對神經網絡的訓練,最后引入算法對基于神經網絡的分類器進行性能優化。識別算法,最后通過工件識別實驗證實了改進后的神經網絡分類器具有較高的識別準確率。通過標準D-H參數法建立華數機器人的運動學模型,分析運動學逆解的求取方法和選取標準。同時詳細分析機器人關節轉角和末端執行器位置之間的關系,得到基于最優抓取點的分揀策略[5]。最后在視覺分揀實驗平臺上完成了工件分揀作業。

圖4 圖像采集過程示意圖
工業機器人分揀流程如下圖5所示。分揀流程分為四個部分:圖像預處理、目標提取、目標分析、分揀抓取。
分揀具體流程為:1.圖像預處理:對采集到的圖像進行圖像平滑去除噪,消除噪聲對圖像的干擾。2.目標提取:使用Canny算子進行二值化,其目的是將目標圖像從背景圖像提取出來。3.單一目標分析:由于目標是規則的幾何工件,僅靠角點檢測是檢測不出來圓形的,所以需要Hough圓檢測來輔助識別。4.分類抓取:對每個單--工件目標求取特征點,求取其目標工件的中心和長短軸[6]。

圖5 系統分揀的流程圖
二、結束語
機器人分揀系統代替人工分揀,具有成本低、效率高的特點。本文介紹搭建了基于機器視覺的工業機器人分揀系統,分析了工業機器人的分揀系統的組成及分揀實現的過程。最后在視覺分揀實驗平臺上進行了對目標工件的抓取實驗,驗證了所設計的工業機器人視覺分揀系統的可行性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32