城市軌道交通無人駕駛模式下的列車自動防護系統設計
2020-09-12 14:04:20陳啟香
科技風 2020年23期
摘 要: 在分析了現有列車駕駛模式及傳統列車自動防護系統功能的基礎上,提出無人駕駛模式下的車載列車自動防護系統概念,設計了列車自動防護系統的框架并定義了其功能,初步探討了其與關聯系統之間的信息交互。該系統疊加在現有信號控制系統之上,進一步保證無人駕駛模式下列車的運行安全。
關鍵詞: 無人駕駛;列車自動防護;信息交互
中圖分類號:U285
Abstract: Purposes—An overview of the state of the train driving mode and traditional train automatic protection system are presented,the onboard automatic train protection system is introduced.Method—System architecture and function are presented,and information exchange between association systems are contrasted.Results—As a safety overlay system of train control system,ATP can increase the safety of driverless train efficiently.
Key words: Fully automated and driverless;Automatic Train Protection(ATP);Information Exchange
1 概述
隨著車輛設計技術、信號和通信技術、計算機技術、系統集成技術等的完美結合,使得全自動無人駕駛地鐵,成為交通技術上的一次質的飛躍,引領城市軌道交通的發展方向。正是如此,世界上許多城市地鐵正在將既有的傳統非全自動模式系統改造成這種全自動模式[1-2]。本論文對城市軌道交通無人駕駛模式下的列車自動防護ATP系統進行研究,提出一種車載ATP系統的設計方案,對ATP系統的構成、與其他信號系統的連接等進行設計,確定該系統的功能方案。
2 ATP系統方案初步設計
本論文設計的ATP系統是一種車載子系統,用于直接保證列車的運行安全,實現對列車安全的全部防護,因此在設計時必須滿足故障—安全原則[3]。
ATP主要保護行車安全,為ATO自動駕駛提供信息及安全防護,為DMI信息顯示提供條件,ATP子系統還將自身的運行數據及故障報警信息發送到車載記錄系統,并能夠實時在線輸出故障信息,以便進行故障分析和診斷[4]。
2.1 功能設計
有人駕駛的ATP系統,列車在ATP防護下,發車由司機觸發,采用列車自動控制系統ATO駕駛實現列車在區間自動運行和站臺定位停車,列車的關門、啟動與故障復位由司機操控[5]。
無人駕駛模式下的ATP要實現列車在CBTC運營模式或點式ATP運營模式下,實時獲取速度位置移動授權等信息,對列車運行進行實時防護。即列車啟動、運行的實時監控、車門開關、列車的制動等,完全由列車自動防護系統完成。因此應具備以下基本功能:實時測速、定位與車距推算;移動授權處理;安全制動模型的計算;牽引切除控制;車門監督與控制;站臺門/車門聯動控制;障礙物/脫軌處理。
2.2 結構設計
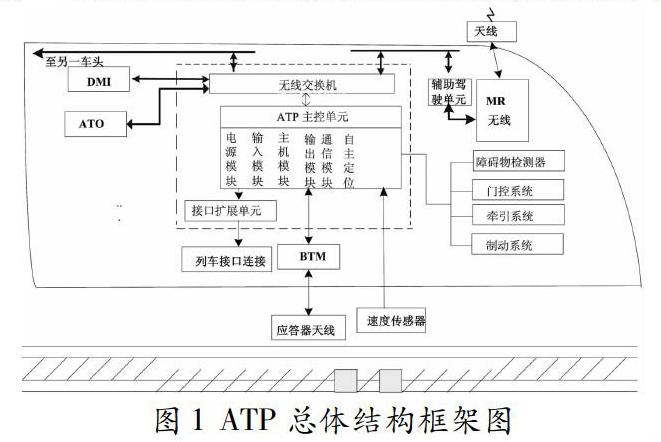
依據ATP系統的功能分析,系統的總體結構圖如圖1所示。
由圖1可知,ATP系統主要包括:ATP主控組匣、數據交換設備、接口擴展部分、輔助駕駛單元、人機界面、車載移動無線設備MR等。ATP主控單元主要由主機模塊、輸入輸出模塊、通信模塊等組成。ATP通過相關接口與其他系統相連,主機模塊將采集、接收到的數據處理后,通過軟件接口提供至應用軟件。應用軟件進行數學計算和邏輯處理,將輸出數據通過軟件接口傳送至主機模塊底層軟件,底層軟件經安全表決和計算形成安全數據,經通信總線發送至輸出模塊或外部設備。
2.3 關聯系統
2.3.1 關聯關系圖
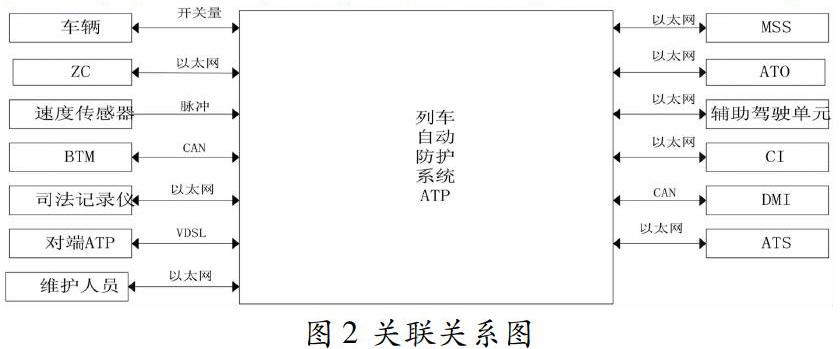
ATP系統功能的實現,需從其他系統獲取相應的信息,因此ATP系統要與其他系統進行關聯,關聯關系圖如圖2所示。
2.3.2 關聯系統描述
(1)ATO。ATO系統根據列車當前的速度、位置、與前車的距離,結合線路參數及列車自動監控系統ATS的控制命令,在ATP的安全防護下,控制列車運行及開關門等,使列車安全、舒適、高效的運行。
(2)ZC。ZC根據聯鎖信息和列車位置信息計算列車移動授權。車載ATP通過無線媒介接收ZC發送的移動授權和無人自動折返按鈕等信息,同時向ZC發送列車速度、列車運行方向、列車級別及駕駛模式、列車位置等信息。
(3)CI。CI實現進路、道岔和信號機等設備的聯鎖控制,按照運營要求為列車辦理進路。車載ATP通過無線媒介接收CI發送的站臺門狀態信息,同時發送站臺門控制命令至聯鎖,實現站臺門與車門的聯動控制。
(4)輔助駕駛單元。完成車輛供電,接收外部命令,對整車進行休眠、喚醒等控制。
(5)ATS系統。ATS實時監督和控制列車,調整列車運行以滿足時刻表要求,并為運營服務提供調整數據,從而最小化無規律干擾的影響。車載ATP通過無線媒介接收ATS發送的表號、車次號、車組號信息,跳停、扣車信息,下一站運行等級和停站時間,遠程聯動等信息。同時向ATS發送列車運行速度及方向、列車駕駛模式、列車車門狀態、列車扣車狀態和相關報警等信息。
(6)信號設備維護支持系統MSS。MSS記錄各信號子系統的維護與報警數據信息。車載ATP通過通信接口向MSS子系統發送維護及報警數據。
(7)DMI系統。DMI在人工駕駛模式下顯示運行相關的信息輔助司機駕駛。車載ATP通過通信接口接收DMI發送的試閘、廣播測試、無線測試等信息;同時向DMI發送列車當前速度、緊急制動速度、推薦速度、目標速度/距離、當前駕駛模式、運行等級、列車完整性、車門/屏蔽門狀態、牽引/制動狀態等信息。
(8)速度傳感器。速度傳感器測量列車速度。車載ATP通過硬線方式獲取速度傳感器的脈沖信息,進而計算出列車的運行速度和運行方向。
(9)應答器傳輸模塊BTM。BTM獲取應答器報文并發送給ATP設備。車載ATP通過CAN總線的通信接口接收BTM發送的應答器報文信息;同時向BTM發送申請報文等信息。
(10)車輛。車載ATP通過電平方式/觸點方式采集列車接口中的輸入信號,并輸出制動信號,切除牽引和門控信號以控制列車的運行。
車載ATP系統初與上述系統關聯并進行信息交換,還需維護人員燒錄車載ATP所用線路相關數據;需安裝司法記錄儀記錄車載ATP設備的工作狀態、駕駛模式、ATP輸出及司機操作等信息。
3 結語
為了保證無人駕駛模式下列車的運行安全,本文提出了車載列車自動防護系統,跟傳統有人駕駛列車的控制系統功能相比較,無人駕駛ATP的功能進行了重新定義,新增障礙物監測及脫軌處理等新功能;結合無線通信新技術、先進的定位技術等,設計了ATP的總體結構框架圖;為完成ATP的基本功能,最后討論了ATP與其他系統間的信息交互。
參考文獻:
[1]任安萍.淺談我國全自動無人駕駛地鐵的發展[J].科技視界,2012,25(9):207-211.
[2]劉攀峰,邱昕夕,陳祥獻.城市軌道交通列車自動防護系統軟件設計[J].計算機程,2012,38(19):1-5.
[3](加)B.S.迪隆.丁川,魯光泉,王云鵬,譯.交通運輸系統的可靠性與安全性[M].北京:機械工業出版社,2018:138-153.
[4]張建平.城市軌道交通列車運行自動控制系統[M].成都:西南交通大學出版社,2017:50-73.
[5]高嶸華,鄭澤熙.軌道交通全自動運行系統對CBTC功能需求的研究[J].自動化與儀器儀表,2018,29(9):5-10.
基金項目: 陜西省教育廳科研計劃項目資助(編號:19JK0043);寶雞文理學院校級重點項目(編號:ZK2017006)
作者簡介: 陳啟香(1988—),女,甘肅白銀人,碩士研究生,講師,主要研究方向為鐵路信號與通信。
