衛星終端小區重選策略設計及優化
2020-09-15 04:48:14汪虹宇莫志鋒張玉成
計算機工程與應用 2020年18期
汪虹宇,莫志鋒,張玉成
1.重慶郵電大學 通信與信息工程學院,重慶 400065
2.中國科學院 計算技術研究所 無線通信技術研究中心,北京 100190
1 引言
在未來空天地一體的移動通信網絡中,衛星通信將占有不可替代的重要地位[1-3]。衛星通信系統具有覆蓋范圍廣、通信距離遠、不受地面條件的約束等優點,以支持手持終端為特征的移動衛星通信是衛星通信領域的重要發展方向[4-5]。小區重選是衛星終端必備的功能,當終端在遇到障礙或位置發生變化,小區重選就成為保證終端正常通信的一個重要因素[6]。小區重選的目的就是找到更合適的服務小區。
針對目前缺乏對于衛星終端小區重選流程的研究,本文從小區重選流程設計出發,將整個流程劃分為重選判斷階段及重選階段,分別對這兩階段進行設計,并在判斷階段提出幀及時隙同步方法。同時,從功耗及效率角度出發,對FCCH同步和幀及時隙同步方法進行了優化,并完成了低功耗場景中的小區重選設計。
2 小區重選背景
2.1 信道數據及其接收
如圖1 所示,終端在接收公共控制信道數據時,會以每8 幀為一個周期循環接收FCCH、廣播控制信道(Broadcast Control Channel,BCCH)、尋呼信道(Paging Channel,PCH)及基本告警信道(Basic Alerting Channel,BACH)等信道數據。FCCH帶有頻率和時間同步信息;BCCH攜帶有系統消息;PCH用于檢測尋呼,分為PCH0和 PCH1;BACH 主要是在 BCCH 和 PCH 接收出錯時發起警報[7-8]。

圖1 公共控制信道分配圖
2.2 小區重選流程分析
觸發小區重選主要有兩種情況:(1)周期性測量;(2)當前小區被禁止接入或地理位置改變[9]。本文主要研究周期性測量觸發的小區重選。
小區重選由媒介訪問控制層(Media Access Control,MAC)完成邏輯控制,物理層完成對鄰小區頻點的信號強度的測量。物理層會周期性地給MAC 層上報當前小區的接收信號強度值(Received Signal Strength Indication,RSSI),當終端處于駐留狀態且重選計時器(RESELECTION_TIMER)達到計數值后,物理層會進行鄰小區的接收信號強度測量并將測量值反饋給MAC層,MAC層根據測量值判斷是否需要重選小區,從而保證正在服務的點波束是可接受的。終端在駐留狀態下完成小區重選的流程如圖2。
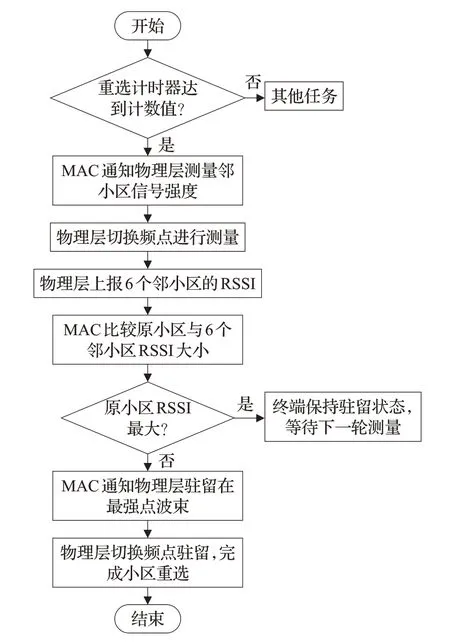
圖2 終端小區重選流程圖
從小區重選的實現角度來看,可以將小區重選劃分為重選判斷階段及重選階段。重選判斷階段主要有兩個任務:(1)測量鄰小區的接收信號強度;(2)信號強度比較,判斷是否需要重選。重選階段的主要任務是重新選擇一個信號強度較大的小區進行駐留。
3 正常模式下的小區重選設計
終端在原小區完成入網后,會釋放信道資源并保持駐留狀態,達到重選計數器計數值就進入小區重選流程。下面主要針對小區重選流程的重選判斷階段及重選階段進行詳細的分析。
3.1 重選判斷階段
當終端處于駐留狀態時,MAC 層會根據重選計時器在相應的時間向物理層下發測量請求以通知物理層測量6 個鄰小區的RSSI 值。物理層在收到測量請求消息后,會切換至鄰小區的頻點上接收廣播數據(BCCH),但由于BCCH每8幀發送一次,鄰小區的BCCH與原小區的BCCH在時間上不重疊,因此如果直接切換頻點將接收不到鄰小區的廣播(頻點與廣播時間不符)。主要采取FCCH 同步和幀及時隙偏移值同步兩種方式來解決切換頻點后接收BCCH的問題。
3.1.1 FCCH同步
FCCH屬于下行發送鏈路信道,主要用于接收信號的同步,在接收鄰小區信道數據之前先利用FCCH信道數據進行時頻同步,能夠讓終端在鄰小區上接收到廣播數據[10]。dual-chirp 信號是指頻率隨時間增加或減少得大時寬帶寬積信號,能夠完成對信號的時延和頻偏的估計,它由up-chirp 信號和down-chirp 信號組成,up-chirp信號的頻率隨時間線性遞增,down-chirp信號的頻率隨時間線性遞減。FCCH 同步的原理是通過dual-chirp 信號完成對信道數據的時延和頻偏的估計[11-13],進而根據估計值來實現接收信道數據的時頻同步。利用dual-chirp信號估計時延頻偏的原理如圖3。
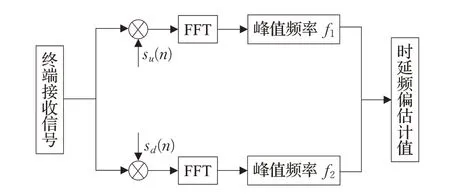
圖3 時頻偏估計原理圖
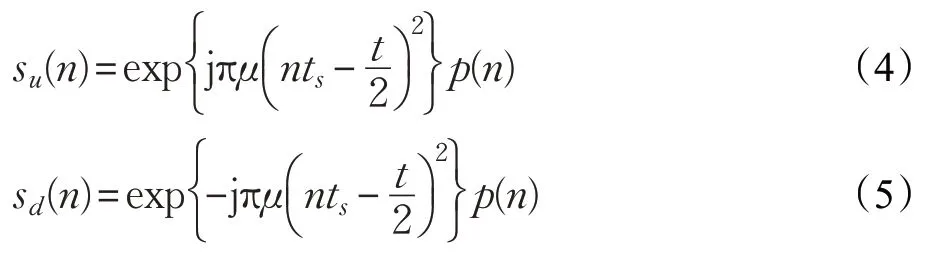
Dual-chirp信號可以表示為[14-15]:

其中,t為burst時長(Dual-chirp信號持續時間),ts為采樣間隔,μ為信號的頻率變化率,n為t內采樣的次數,p(n)是一個單位矩形脈沖,取值如下:

可將dual-chirp信號進行分解為:

其中up-chirp 信號su(n)和down-chirp 信號sd(n)的表達式如下:
移動終端接收到的信號可以表示為:
其中,td為信號的時延值,fd為信號的頻偏值,n(ts)為均值為0的加性隨機白噪聲。
為了突出信號特征,對移動終端接收到的信號r(n)分別經過up-chirp 信號和down-chirp 信號解掃頻后得r(n)?su(n)、r(n)?sd(n),再進行快速傅里葉變換(Fast Fourier Transformation,FFT),可得up-chirp信號和down-chirp 信號的峰值頻率f1、f2:

由式(7)可以推出頻偏估計值fd和時延估計值td:

根據求得的時延、頻偏估計值就可以完成對信道數據的同步了。
3.1.2 幀及時隙偏移值同步
由于衛星通信系統是一種蜂窩通信系統,因此一個初始點波束具有6 個相鄰的點波束,初始點波束的BCCH信道會攜帶其余6個鄰近點波束的信道數據接收的相對幀偏移值和時隙偏移值信息。
衛星通信系統也是一種時分多址(Time Division Multiple Access,TDMA)系統,TDMA幀是TDMA系統的基本組成單元。TDMA幀可用幀號進行表示,幀號會隨著每個TDMA 幀的結束而增加,幀號的更新周期為一個hyper-frame 的長度(313 344 個TDMA 幀)。在每個hyper-frame周期內,終端會按照圖1的順序接收相應的信道數據。
Fmn表示相對幀偏移值,其含義是點波束n相對于點波束m的幀偏移值,其取值滿足如下條件:

根據從原小區的BCCH 中獲取的鄰小區相對幀偏移Fmn和原小區接收廣播的幀號可以確定出鄰小區接收廣播數據的幀號,從而在對應的TDMA 幀上接收廣播信道數據。
由于 PCH 分為 PCH0 和 PCH1,用于尋呼的 PCH 都是固定的,可以從BCCH攜帶的系統信息確認終端應接收的PCH 為PCH0 還是PCH1,一個尋呼信道的周期為16幀。為了避免終端錯過原小區的BCCH和PCH的接收,采取圖4的方法先在原小區接收16幀信道數據以保證有外界尋呼時至少可以接收到一次原小區的BCCH和PCH,然后再切換至鄰小區接收信道數據,即在第a+16+Fmn幀開始接收鄰小區的信道數據,在第a+24幀開始重復上述步驟。
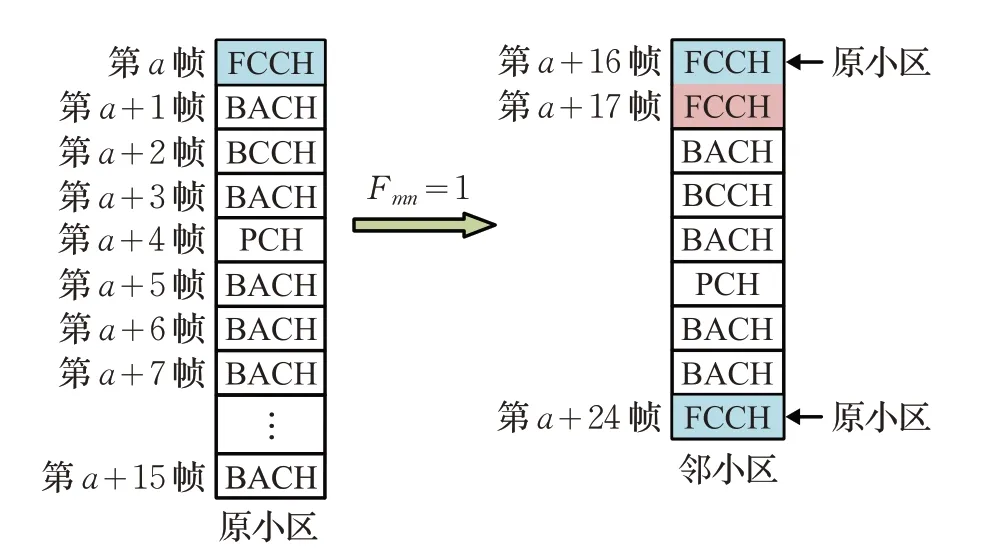
圖4 原小區及鄰小區的信道數據接收示意圖
Tij表示相對時隙偏移,其含義是點波束j相對于點波束i的時隙偏移值,其取值滿足如下條件:

一個TDMA 幀分為24 個時隙[16],根據時隙偏移值Tij可以確定出鄰小區接收廣播數據的時隙,從而能夠在正確的幀及時隙上接收信道數據。如圖5所示,令原小區在第a幀的第1 個時隙上接收BCCH,當時隙偏移Tij=2 時,就可以確認出鄰小區接收BCCH 的位置位于第a+Fij幀的第3個時隙上。
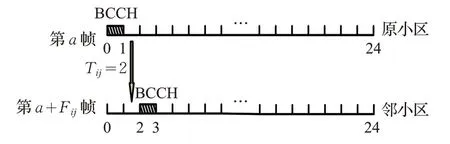
圖5 基于時隙偏移接收信道數據示意圖
3.1.3 信號強度測量及判斷
在接收到鄰小區的廣播數據后,物理層根據收到的廣播數據獲取對應頻點的信號增益,從而根據以下公式計算出該頻點的RSSI:

G為終端接收的信號的增益,Grx是終端接收機在接收信號時的接收增益,其取值范圍為0~Grx_max。
物理層在完成鄰小區信號強度的測量后,會連續向MAC層回復10~15次測量信息。物理層每回復一次測量信息,都會將鄰小區的RSSI 反饋給MAC 層,然后切換回原頻點接收信道數據,這樣做的目的是為了避免在測量期間錯過原小區的尋呼(PCH),接收一個周期的原小區信道數據后,又切換至鄰小區測量,循環10~15次。在測量完成之后,MAC 層將下發停止測量請求以告知物理層停止測量。
物理層停止測量后會先在原小區繼續接收信道數據,MAC 層將多次測量的6 個鄰小區的RSSI 平均值與原小區的RSSI 作比較,若原小區信號強度最大,則按圖6 左側交互圖繼續駐留原小區,等待下一輪測量,反之則按圖6 右側交互圖完成切換頻點并駐留在信號強度最大的鄰小區。
3.2 重選階段
當鄰小區的RSSI大于原小區時,MAC層將會下發駐留請求給物理層,物理層在收到駐留請求后會將頻點切換至鄰小區頻點接收信道數據。但不能直接切換到鄰小區頻點,需采取上述的FCCH同步方式或幀及時隙同步方式來進行調整。
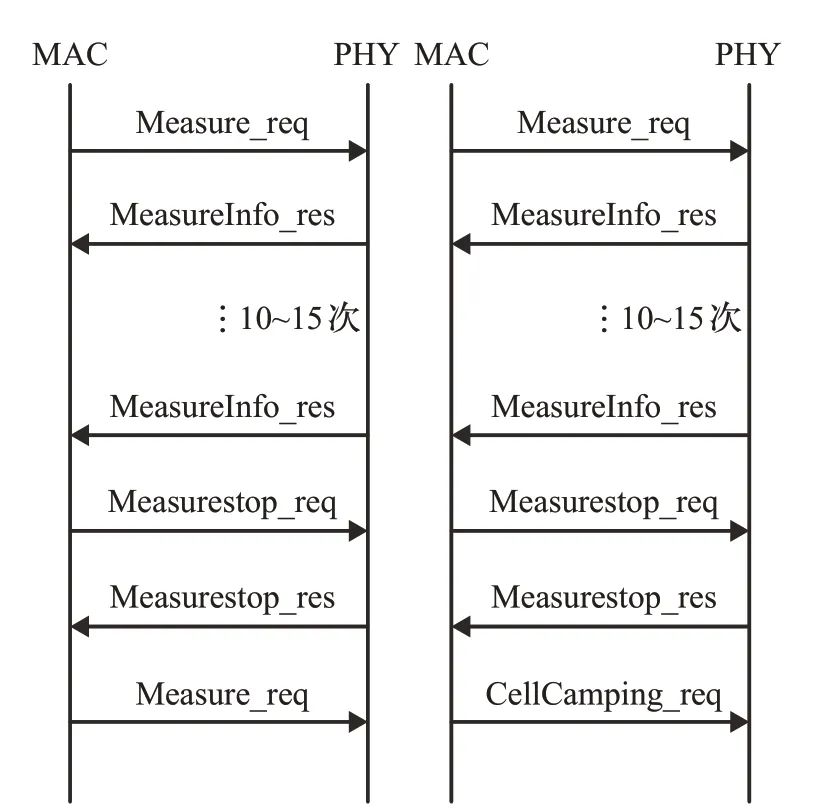
圖6 小區重選MAC/PHY交互圖
終端在新的小區駐留后,經過圖7 所示的MAC/PHY交互之后,在新的小區入網,完成入網之后信道資源釋放,然后保持駐留狀態,在達到重選計時器計數值后進行下一次測量。
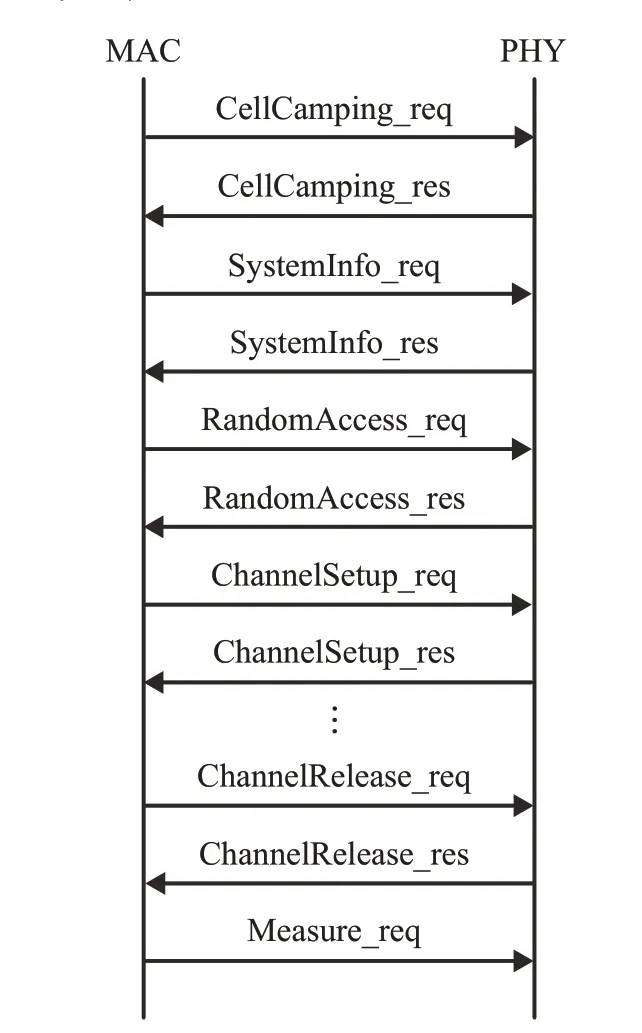
圖7 重選小區后MAC/PHY交互流程圖
4 低功耗模式下小區重選優化設計
在接收信道數據時,終端會打開射頻開關來完成接收任務,而射頻模塊的功耗占據了終端整體功耗的較大的占比。
在正常模式下,終端在測量期間會以每8幀為一個周期接收FCCH、BACH0、BCCH、BACH1、PCH0(PCH1)、BACH2、BACH3、BACH4 等信道數據。在低功耗模式下,對測量期間信道數據的接收進行優化,采取“無用幀”方式接收信道數據,無用幀指沒有接收任務的幀。當處于無用幀時,通過引導射頻模塊進入睡眠模式,可以降低功耗。
4.1 重選判斷階段
同正常模式一樣,低功耗模式重選判斷階段的主要任務為測量鄰小區的接收信號強度,并根據RSSI 的比較判斷是否需要進行重選。
在低功耗模式下,當終端處于駐留狀態時,駐留時間達到重選計時器計數值后,物理層將會進行測量工作,為了能夠正確地接收到鄰小區的廣播信道數據,需要同正常模式一樣進行FCCH同步或幀及時隙同步。
4.1.1 FCCH同步優化
采取FCCH 同步方式時,為了實現時頻同步,終端將會接收FCCH 信道數據;為了計算信號的信號強度,終端將會獲取BCCH信道數據;為了在測量期間不錯過尋呼,終端將會接收PCH信道數據。因此,終端在原小區可以只接收FCCH、BCCH 及PCH 信道數據,而在鄰小區時只需要接收FCCH 和BCCH 信道數據。原小區和鄰小區在一個接收周期(8幀)的信道數據接收情況如圖8所示。
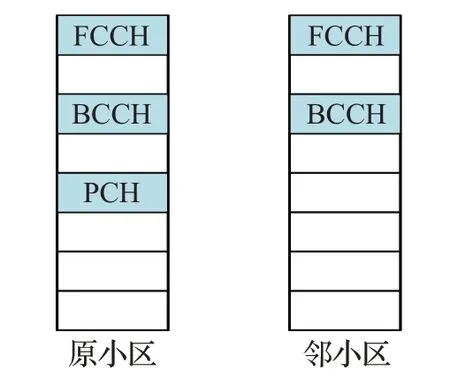
圖8 原小區及鄰小區信道數據接收圖
4.1.2 幀及時隙偏移值同步優化
在低功耗模式下,如果通過幀及時隙同步方式來確保正確接收鄰小區信道數據,就不必接收FCCH信道數據了。在原小區時,終端一個周期內只接收兩幀數據(BCCH 和PCH),連續無用幀時射頻模塊進入睡眠模式;鄰小區則只需接收BCCH以計算鄰小區的RSSI。
雖然網絡端會讓原小區和鄰小區的BCCH 錯開發射,使它們在時間上不重疊,但可能會出現鄰小區的BCCH 與原小區的PCH 重疊。由于鄰小區只需要接收BCCH,可以通過對正常模式下幀及時隙同步進行優化來避免鄰小區的BCCH和原小區的PCH重疊。
從原小區的BCCH 中獲取鄰小區的相對幀偏移Fmn,先對Fmn進行判斷,確認其值是否為2,當Fmn≠2時,例如Fmn=1,則原小區和鄰小區的信道數據接收示意圖如圖9。
當鄰小區相對于原小區的幀偏移Fmn=2 時,如果按照上述方法的話,鄰小區的BCCH 將會和原小區的PCH重合,從而導致錯過原小區的尋呼。
當終端應收PCH 為PCH0 時,可以在原小區PCH1的幀號(第a+12 幀)處接收鄰小區的BCCH。其信道數據接收示意圖如圖10。
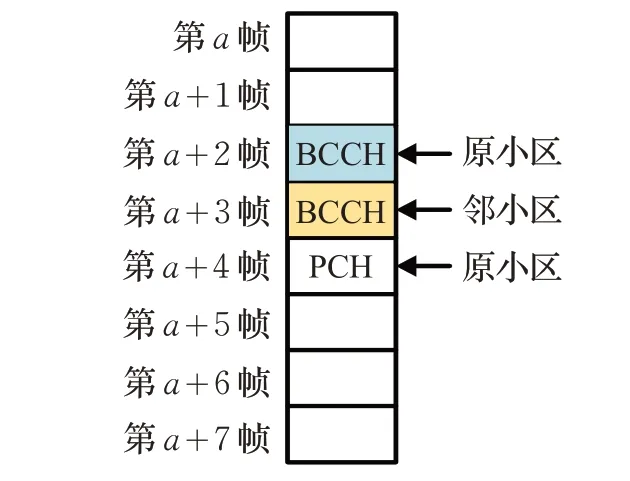
圖9 Fmn=1 時信道數據接收示意圖

圖10 尋呼組為PCH0時信道數據接收圖
當終端應收 PCH 為 PCH1 時,在 PCH0 的幀號(第a+4 幀)處接收鄰小區的BCCH。其信道數據接收示意圖如圖11。
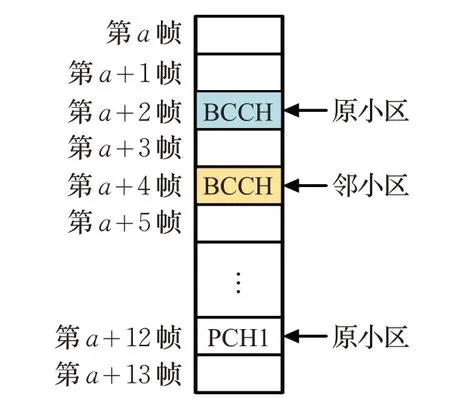
圖11 尋呼組為PCH1時信道數據接收圖
根據相對時隙偏移值Tij可以確定信道數據的具體接收時隙,至此,幀號及時隙都已確認,就能夠保證接收到鄰小區的BCCH了。
4.1.3 信號強度測量及判斷
在接收到鄰小區的BCCH信道數據后,根據公式(11)可以得到鄰小區的信號強度。
收到測量請求后,物理層會在原小區頻點和鄰小區頻點間多次來回切換以保證可以收到原小區的BCCH和PCH及鄰小區的BCCH。由于協議棧(MAC層)工作會消耗電能,所以與正常模式不同的是,在低功耗階段,協議棧處于休眠不工作狀態,由物理層定期啟動鄰小區信號強度測量,在測量完鄰小區的信號強度后,由物理層完成原小區和6個鄰小區信號強度大小的比較,如果有鄰小區的信號強度比原小區大,則選擇信號強度較大的鄰小區進行駐留。
4.2 重選階段
當某個鄰小區的平均信號強度值大于原小區時,物理層喚醒協議棧(MAC),由MAC 層下發駐留請求,然后物理層切換至該鄰小區頻點接收信道數據,切換過程可以采取針對低功耗模式的FCCH 同步或幀及時隙同步來實現。在鄰小區駐留后,終端會完成圖7 所示的隨機接入、入網、信道資源釋放等流程,然后進行下一次測量。
5 測試驗證與分析
對整個優化設計策略的測試驗證主要從功耗、時間效率和協議一致性角度出發。本文采用致遠的PA5000H功率分析儀對終端完成小區重選流程的功耗數據進行測試;采用中科晶上的JY5000 衛星終端協議一致性分析儀對小區重選流程的時間效率及協議一致性進行驗證。
5.1 實測數據及仿真
表1 為終端在正常模式和低功耗模式下分別通過兩種同步方式完成小區重選時的平均功耗實測數據。
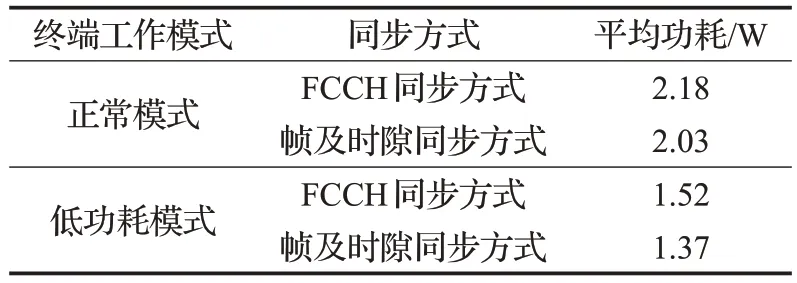
表1 不同模式下不同同步方式功耗測試數據表
圖12和圖13分別是采取兩種同步方式實現小區重選時的信令流程圖,可獲取信令完成時間。
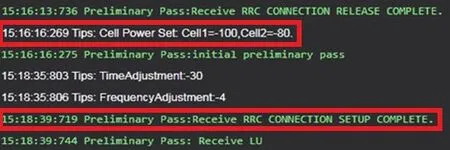
圖12 FCCH同步方式切換至鄰小區信令流程圖
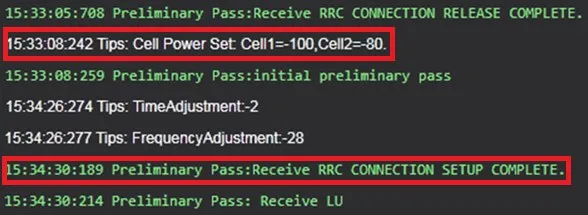
圖13 幀及時隙同步方式下切換至鄰小區信令流程圖
圖14是使用JY5000對低功耗場景下通過幀及時隙同步算法實現小區重選的一致性測試仿真圖。

圖14 小區重選協議一致性仿真圖
5.2 結果分析
由表1可以看出,通過兩種同步方式實現小區重選時,幀及時隙同步方式功耗更低。FCCH同步方式每個接收周期會多接收一個FCCH進行時頻同步,因而終端會消耗更多的功耗;完成小區重選時,改進后的低功耗方案相比于正常模式下消耗的功耗明顯更低,這是因為在正常模式接收信道數據時,終端會接收所有的信道數據,射頻模塊會持續工作,造成不必要的功耗,而在低功耗模式下,原小區只需要在接收BCCH 和PCH 時打開射頻模塊,而鄰小區只在接收BCCH 時打開射頻模塊,因此能夠有效的降低重選過程中的功耗。
由圖12和圖13可知,完成小區重選信令流程時,采取FCCH同步方式耗時2 min23 s,而幀及時隙同步方式耗時1 min22 s,因此后者的效率更高。由于幀及時隙同步可以直接確認鄰小區接收信道數據的相對幀號及時隙,不需要做時頻同步,因而能更快速地接收到鄰小區的信道數據。
圖14 的仿真結果驗證了在低功耗場景下,通過幀及時隙同步方式完成小區重選的設計方案滿足協議一致性。
因此,從功耗及效率角度出發,改進后的低功耗方案下通過幀及時隙同步方式完成小區重選是最佳選擇。
6 結束語
本文主要研究了正常場景及低功耗場景下的小區重選。在重選過程中提出了FCCH 同步和幀及時隙同步算法,并針對低功耗場景進行優化。通過實測功耗數據及協議一致性分析儀JY5000 測試,對設計的小區重選流程進行了驗證,驗證結果支持了所設計的小區重選方案。該方案對以后在衛星終端低功耗方面的研究具有一定的參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00