一級倒立擺控制方法比較研究
2020-09-15 16:30:34馬朝陽華云松周磊
計算機時代 2020年8期
馬朝陽 華云松 周磊
摘要:為了對倒立擺進行準確快速的控制,根據牛頓力學原理建立一級倒立擺的數學模型,并運用MATLAB對該系統的性能進行分析。運用模糊控制理論設計基于融合函數的模糊控制器、串聯模糊控制器和模糊PID控制器,并在MATLAB上建立SIMULINK仿真模型進行模擬仿真,最后對設計的三種控制器的控制效果進行分析比較。仿真結果表明:對于一級倒立擺,基于融合函數的模糊控制器和串聯模糊控制器分別能在2.5秒和2秒內使倒立擺穩定,而模糊PID的控制方法會使倒立擺在1秒內實現穩定,明顯優于其他兩種方法。
關鍵詞:一級倒立擺;融合函數;模糊控制器;模糊PID
中圖分類號:TP13 文獻標識碼:A 文章編號:1006-8228(2020)08-01 -05
0引言
倒立擺系統成本低,結構簡單,并且能夠反映被控系統的鎮定性等性能參數,因此倒立擺系統的研究在控制領域方面著發揮著十分重要的意義[1-2]。
研究設計三種模糊控制器,建立仿真模型,通過調節參數,對倒立擺進行仿真控制,然后分析比較這幾種控制器的控制效果。
1 數學建模與性能分析
1.1 建立數學模型
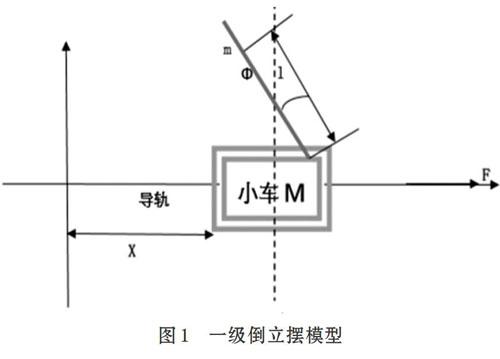
一級倒立擺忽略空氣阻力和各種摩擦后,可抽象成小車和勻質桿組成的系統[3],如圖l所示。
圖1中M為小車質量,m為擺桿質量,l為擺桿轉動軸心到桿質心的長度,F為加在小車上的力,x為小車位置,φ為擺桿與垂直向上方向的夾角,圖2中6為小車摩擦系數,圖3中I為擺桿慣量,θ表示擺桿與垂直向下方夾角(擺桿初始位置向下)。其中,N和P為小車與擺桿相互作用力的水平方向和垂直方向的分量。
對小車水平方向所受合力進行分析得到:
對擺桿水平方向的受力進行分析可以得到:
把式(2)代入式(l),就得到第一個運動方程:
對擺桿垂直方向上的合力進行分析可以得到:
設θ=π+φ(φ是擺桿與垂直向上方向之間夾角),假設φ與1(單位是弧度)相比很小,即φ<<1,則可以進行近似地處理為:cos θ=-1,sinθ=○,θ=0。
用a來代表被控對象的輸入力F,線性化后,兩個運動方程如下:
由文獻[4]知小車質量M=l.096Kg,擺桿質量m=0.109Kg,小車摩擦系數b=0.1N/m/sec,擺桿轉動軸心到桿質心的長度1=0.25m.擺桿慣量I=0.0034kg*m*m,將參數代入式(9),可得以小車加速度作為輸入的系統狀態方程:
1.2 系統穩定性、能控性分析
穩定性就是指偏離平衡狀態的受擾運動能否只依靠系統內部的結構因素而返回到平衡狀態,或限制在它的一個有限鄰域內[5]。
利用MATLAB調用函數eig(A),來求解系統的極點,結果如圖4所示,可知此系統不穩定。
通過MATLAB命令ctrb(A,B)可以得到可控性矩陣,結果如圖5所示,能控性矩陣滿秩,所以一級倒立擺系統是完全能控的。
2 控制器設計
2.1 基于融合函數的模糊控制器
將融合技術與模糊控制相結合,分別把狀態變量位移x和角度φ,速度x和角速度φ通過融合函數融合成偏差E和偏差變化率EC,然后通過調節比例因子和量化因子,實現倒立擺的穩定。模糊控制器結構圖如圖6所示。
取誤差E和誤差變化率EC的論域分別是X=[-6,6],Y=[-6,6],輸出論域為2=[-6,6]。取模糊子集為NB,NM,NS,ZE,PS,PM,PB。輸入輸出模糊子集相同。根據輸入輸出論域上的模糊語言變量劃分,可以設計模糊規則表見表l。
在MATLAB里建立仿真模型,如圖7所示。
2.2 串聯模糊控制器
將小車位置和速度作為位置模糊控制器的輸入,將輸出乘以一個廣義角與小車角度一起作為角度和角速度當作角度模糊控制器的輸入,系統控制力作為輸出量,以此構成一個串聯模糊控制器來控制倒立擺[6-8]。
首先建立位置模糊控制器規則,把小車位置和位置變化率即速度劃分為7個等級級即NB,NM,NS,ZE,PS,PM,PB,并取模糊論域為[-6,6]。位置模糊控制器規則見表2。
建立角度模糊控制器,把小車角度和角度變化率即角速度也劃分為同樣的7個等級即NB,NM,NS,ZE,PS,PM,PB,并取模糊論域[-6,6]。角度模糊控制器規則見表3。
在MATLAB里建立仿真模型,如圖8所示。
2.3 模糊PID控制器
以傳統PID控制器作為基礎,把偏差作為PID控制部分的輸入[9],把偏差和偏差變化率當作模糊控制部分的輸入,然后將模糊控制部分的三個輸出AKp、AKi、△Kd相對應與PID控制部分的輸出進行相加后,利用綜合結果對被控對象進行控制。模糊PID控制器的結構圖如圖9所示。
為了控制PID控制器的三個參數,要設計三個模糊控制器輸出對PID參數調整[10]。由于偏差較大時,適合選取較大的Kp和較小的Kd,可使系統響應加快,為防止超調較大可限制積分作用;偏差較小時,適合選用較大的Kp和Ki,可改善系統穩態性能[11];偏差介于這兩者之間時應用較小的Kd,減小系統超調。由此得到模糊規則,見表4、表5、表6。
3 仿真實驗
為了比較設計的三種控制的控制效果,此部分對控制器進行仿真實驗。
3.1 基于融合函數的模糊控制器實驗
設初始狀態為[0.0l;0;0;0],狀態方程設置為A=[O1 0 0;0 0 0 0;0 0 0 1;0 0 29.4 0],B=[0;l;0;3],C=[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1],D=[0;0;0;0]。設置好以上參數后,對兩化因子Ke、Kec和比例因子Ku進行調整。
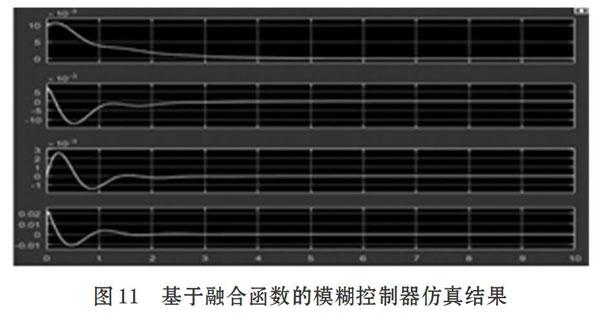
經過實驗驗證,確定當Ke=15,Kec=20,Ku=5時,基于融合函數的模糊控制器控制效果最好,能在2.5秒內使倒立擺穩定,如圖ll所示。
3.2 串聯模糊控制器實驗
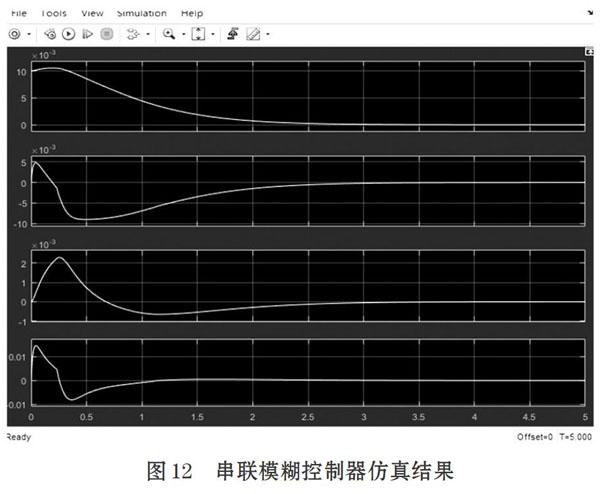
設初始狀態為[0.01;0;0;0]。經過實驗測試確定當取KEl=6, KECl=6, KUl=0.03, KE2=20, KEC2=3,KU2=5,串聯模糊控制器仿真效果最好,會在2秒內使系統穩定,如圖12所示。
3.3 模糊PID控制器實驗
設系統初始狀態為[0;0;0.01;0],PID控制器的初始值Kp=300,Ki=600,Kd=40,初始值Ke=0.075,Kec=0.6,△Kp、△Ki、△Kd的初始值為0.067、0.01、0.5。
經實驗測試當取Kp=-300,Ki=-100,Kd=-50時模糊PID控制效果最好,可以在1秒內使倒立擺的穩定,如圖13所示。
4 結束語
本研究對設計的三種控制器進行仿真測試,仿真結果表明,這三種方法都能使倒立擺穩定,但是基于融合函數的模糊控制器的控制效果最差,能在2.5秒內使倒立擺穩定;串聯模糊控制器次之,能在2秒內使倒立擺穩定;模糊PID控制器的控制效果明顯比其他兩種控制器優秀,能在1秒內使倒立擺穩定。
對于倒立擺的穩定控制研究,可以將其應用到機器人行走中。由于本研究中的參數都需要手動測試調節,所以后面進一步研究參數自適應,使其能夠適應于更多場合。
參考文獻(References):
[1]XIU-LING ZHNAG, HONG-MIN FAN, JIA-YIN ZANGet aI.Nonlinear control of triple inverted pendulumbasedonGA-PIDNN[J]. NolinerDyn, 2015.79: 1185-1194
[2]鄒忱忱.基于粒子群算法的LQR直線二級倒立擺的控制研究[D].西安科技大學,2017:5-13
[3]魏勝男.一級直線倒立擺的模糊控制方法[D].太原科技大學,2012:4-9
[4]李琳.一級倒立擺的雙回路PID控制[J].科技創新導報,2012.32:75
[5]宋麗蓉,邢燦華.現代控制理論[M].中國電力出版社,2015.
[6]安新雨,張濤.一級直線倒立擺串聯模糊控制方法研究[J].科技信息,2015.2(6):48-51
[7]陳華.單級倒立擺智能控制器設計[J].重慶工學院學報(自然科學),2009.23(1):98-101
[8] GELU-OVIDIU TIRIAN, OCTAVIAN PROSTEAM, IOANFILIP.Inverted pendulum controlled through fuzzy logic[C].Romania,2015.34:85-90
[9]黎君,閻世良.一級倒立擺模糊PID控制器設計[J].研究與開發,2012.31(4):50-52
[10]武彬,張奕英.模糊自整定PID控制在主汽溫控制中的應用[J].計算機仿真,2015.2: 395-396
[11]楚清河,李衛華.基于模糊自適應PID技術的歷次控制器研究[J].機械制造與自動化.2013.12(2):160-162
作者簡介:馬朝陽(1995-),男,江蘇徐州市人,碩士研究生,主要研究方向:機器視覺、機器人控制。
通訊作者:華云松(197卜),男,上海人,副教授,主要研究方向:自動測量與檢測技術。