旋轉(zhuǎn)導(dǎo)彈風(fēng)洞動(dòng)態(tài)測(cè)力試驗(yàn)技術(shù)研究
2020-09-21 02:56:02董金剛金佳林李廣良秦永明馬漢東
實(shí)驗(yàn)流體力學(xué) 2020年4期
關(guān)鍵詞:模型
董金剛, 金佳林, 李廣良, 秦永明, 馬漢東
(中國(guó)航天空氣動(dòng)力技術(shù)研究院, 北京 100074)
0 引 言
旋轉(zhuǎn)導(dǎo)彈是指在飛行中繞自身縱軸連續(xù)滾轉(zhuǎn)的一類導(dǎo)彈[1]。導(dǎo)彈旋轉(zhuǎn)飛行可以減小各種非對(duì)稱因素對(duì)飛行性能的不利影響,從而簡(jiǎn)化導(dǎo)彈控制系統(tǒng)[2-5]。經(jīng)過(guò)半個(gè)多世紀(jì)的發(fā)展,旋轉(zhuǎn)導(dǎo)彈已成為導(dǎo)彈武器的重要分支[6-7]。
旋轉(zhuǎn)導(dǎo)彈基本都采用鴨式氣動(dòng)布局和滾轉(zhuǎn)彈體單通道控制模式[2-3,8-9],在飛行時(shí)彈體沿縱軸高速旋轉(zhuǎn),鴨舵作高速動(dòng)態(tài)偏轉(zhuǎn)。國(guó)內(nèi)外研究者對(duì)旋轉(zhuǎn)導(dǎo)彈的氣動(dòng)特性進(jìn)行了大量研究[10-18],結(jié)果表明:鴨舵產(chǎn)生的渦流場(chǎng)與彈體、尾翼相互干擾,受彈體旋轉(zhuǎn)運(yùn)動(dòng)及舵面動(dòng)態(tài)偏轉(zhuǎn)運(yùn)動(dòng)的影響,呈現(xiàn)較強(qiáng)的非定常氣動(dòng)效應(yīng),空氣動(dòng)力學(xué)特性非常復(fù)雜。
20世紀(jì)90年代以來(lái),美國(guó)NASA及Raytheon公司圍繞具體型號(hào)開展了一系列旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)氣動(dòng)力測(cè)量試驗(yàn)研究[19-21]。受風(fēng)洞試驗(yàn)條件限制,國(guó)內(nèi)僅開展了旋轉(zhuǎn)導(dǎo)彈在簡(jiǎn)單旋轉(zhuǎn)狀態(tài)下的靜態(tài)氣動(dòng)力風(fēng)洞測(cè)量試驗(yàn),試驗(yàn)對(duì)象僅限于單獨(dú)彈體或簡(jiǎn)單翼身組合體。
在風(fēng)洞試驗(yàn)中,需要對(duì)導(dǎo)彈的旋轉(zhuǎn)運(yùn)動(dòng)進(jìn)行模擬。對(duì)于炮彈類旋轉(zhuǎn)武器,由于長(zhǎng)細(xì)比較小,試驗(yàn)?zāi)P椭睆捷^大,模型內(nèi)部可以安裝空氣驅(qū)動(dòng)渦輪(轉(zhuǎn)速可達(dá)20 000 r/min)[22-23];而對(duì)于大長(zhǎng)細(xì)比導(dǎo)彈,試驗(yàn)?zāi)P椭睆捷^小,旋轉(zhuǎn)運(yùn)動(dòng)主動(dòng)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)較為困難,通常采用模型尾翼斜置安裝角的方法,利用氣動(dòng)力使模型自由旋轉(zhuǎn)[24],但該方法存在轉(zhuǎn)速不穩(wěn)定、不易主動(dòng)控制等問(wèn)題。常規(guī)風(fēng)洞靜態(tài)氣動(dòng)力測(cè)量技術(shù)無(wú)法得到導(dǎo)彈旋轉(zhuǎn)運(yùn)動(dòng)引起的非定常氣動(dòng)特性數(shù)據(jù),需要研究在風(fēng)洞中模擬旋轉(zhuǎn)導(dǎo)彈運(yùn)動(dòng)特征以及對(duì)氣動(dòng)力實(shí)現(xiàn)動(dòng)態(tài)測(cè)量的試驗(yàn)技術(shù)。
本文對(duì)大長(zhǎng)細(xì)比旋轉(zhuǎn)導(dǎo)彈模型旋轉(zhuǎn)運(yùn)動(dòng)主動(dòng)控制技術(shù)進(jìn)行研究,建立旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)測(cè)力試驗(yàn)技術(shù)并對(duì)典型鴨式布局旋轉(zhuǎn)導(dǎo)彈進(jìn)行風(fēng)洞動(dòng)態(tài)測(cè)力試驗(yàn)。
1 試驗(yàn)技術(shù)與數(shù)據(jù)處理方法
1.1 旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)測(cè)力技術(shù)總體方案
旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)測(cè)力試驗(yàn)系統(tǒng)如圖1所示。在旋轉(zhuǎn)導(dǎo)彈試驗(yàn)?zāi)P蛢?nèi)部安裝微型驅(qū)動(dòng)系統(tǒng)(由微型電機(jī)和傳動(dòng)軸組成),并與模型進(jìn)行一體化設(shè)計(jì),達(dá)到對(duì)模型轉(zhuǎn)速進(jìn)行主動(dòng)控制的效果。在傳動(dòng)軸與模型連接端,設(shè)計(jì)安裝了模型旋轉(zhuǎn)轉(zhuǎn)速和相位測(cè)量裝置,可以實(shí)時(shí)反饋模型轉(zhuǎn)速和旋轉(zhuǎn)相位。采用內(nèi)式五分量天平、動(dòng)態(tài)數(shù)據(jù)采集與處理技術(shù)對(duì)模型動(dòng)態(tài)氣動(dòng)力進(jìn)行測(cè)量。試驗(yàn)流程如圖2所示。
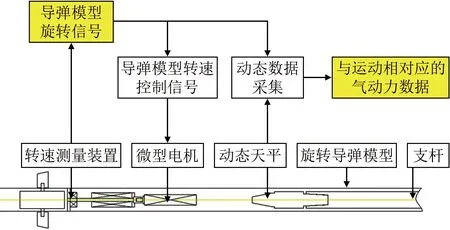
圖1 試驗(yàn)系統(tǒng)組成圖
1.2 大長(zhǎng)細(xì)比導(dǎo)彈模型旋轉(zhuǎn)運(yùn)動(dòng)主動(dòng)控制技術(shù)
在風(fēng)洞試驗(yàn)中模擬旋轉(zhuǎn)導(dǎo)彈模型的轉(zhuǎn)速,要求斯特勞哈爾數(shù)Sr(Strouhal number)相似,Sr=ωl/2v,其中ω為彈體繞體軸的旋轉(zhuǎn)速度,l為飛行器特征長(zhǎng)度,v為來(lái)流速度。由于風(fēng)洞中采用縮比模型,所以要求模型轉(zhuǎn)速比實(shí)際飛行時(shí)更高。受風(fēng)洞模型彈體直徑的限制,大長(zhǎng)細(xì)比旋轉(zhuǎn)導(dǎo)彈的可控高速旋轉(zhuǎn)存在一定技術(shù)難度。常規(guī)方法是使用尾翼斜置角,利用彈體自身氣動(dòng)力使模型旋轉(zhuǎn),其缺點(diǎn)在于試驗(yàn)過(guò)程中不能連續(xù)穩(wěn)定控制模型轉(zhuǎn)速,且轉(zhuǎn)速會(huì)隨迎角和馬赫數(shù)的改變出現(xiàn)較大波動(dòng)。

圖2 試驗(yàn)流程
主動(dòng)旋轉(zhuǎn)模型結(jié)構(gòu)以及實(shí)物如圖3和4所示。模型外形與實(shí)際導(dǎo)彈幾何相似,模型壁厚在保證剛度的條件下盡量薄,內(nèi)部安裝旋轉(zhuǎn)組件(如圖3放大圖所示)。微型電機(jī)安裝于旋轉(zhuǎn)組件內(nèi),電機(jī)傳動(dòng)軸伸出旋轉(zhuǎn)組件端面與模型連接,另一端與測(cè)力天平連接并以支桿固定安裝。試驗(yàn)時(shí),以微型電機(jī)驅(qū)動(dòng)模型高速旋轉(zhuǎn),旋轉(zhuǎn)組件固定不轉(zhuǎn),模型所受氣動(dòng)力通過(guò)軸承傳遞至測(cè)力天平。
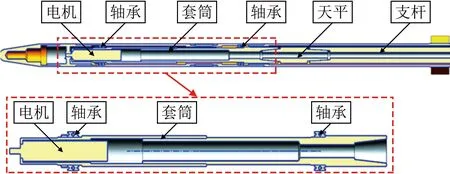
圖3 主動(dòng)旋轉(zhuǎn)模型結(jié)構(gòu)圖

圖4 導(dǎo)彈模型旋轉(zhuǎn)組件實(shí)物圖
為確保模型高速旋轉(zhuǎn)時(shí)不發(fā)生抖動(dòng),沿模型軸向設(shè)計(jì)了2處配重調(diào)節(jié)位置,方便對(duì)模型進(jìn)行軸向質(zhì)量分布調(diào)節(jié)。在模型集成安裝完成后,使用動(dòng)平衡試驗(yàn)臺(tái)調(diào)節(jié)動(dòng)平衡,動(dòng)平衡精度為7 g·mm。
1.3 測(cè)力天平
試驗(yàn)采用五分量環(huán)式天平設(shè)計(jì)方案,如圖5所示,中間的環(huán)形孔供模型內(nèi)安裝的微型驅(qū)動(dòng)電機(jī)走線。為提高天平剛度以適用于動(dòng)態(tài)測(cè)量,舍棄了軸向力測(cè)量分量。天平各分量設(shè)計(jì)載荷見(jiàn)表1。
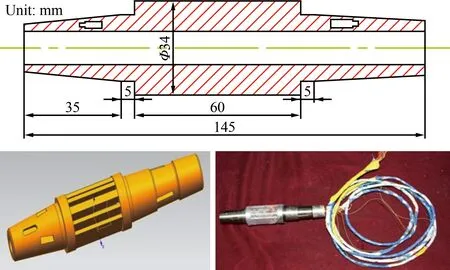
圖5 中空五分量環(huán)式天平結(jié)構(gòu)圖和實(shí)物

表1 天平設(shè)計(jì)載荷Table 1 Design load of balance
1.4 數(shù)據(jù)采集與處理方法
采用DH5927動(dòng)態(tài)測(cè)試信號(hào)分析系統(tǒng)對(duì)天平氣動(dòng)力進(jìn)行動(dòng)態(tài)采集。根據(jù)模型最大轉(zhuǎn)速(20 Hz)以及每旋轉(zhuǎn)1周需要的采樣點(diǎn)(不低于360個(gè)),設(shè)計(jì)采樣頻率為20 kHz。
試驗(yàn)時(shí),對(duì)每個(gè)迎角狀態(tài)下的天平輸出信號(hào)進(jìn)行動(dòng)態(tài)采集,根據(jù)旋轉(zhuǎn)相位測(cè)量裝置的數(shù)據(jù)確定模型的滾轉(zhuǎn)角姿態(tài),從而確定彈體的相位零點(diǎn)。在判斷模型滾轉(zhuǎn)角0°的起始時(shí)刻后,截取2 s左右的整數(shù)個(gè)旋轉(zhuǎn)周期的數(shù)據(jù)(例如,彈體轉(zhuǎn)速5 Hz時(shí)的有效數(shù)據(jù)為10個(gè)彈體旋轉(zhuǎn)周期,15 Hz時(shí)則為30個(gè)彈體旋轉(zhuǎn)周期),再依次對(duì)動(dòng)態(tài)試驗(yàn)數(shù)據(jù)進(jìn)行頻譜分析和濾波處理。
以模型已經(jīng)穩(wěn)定旋轉(zhuǎn)而風(fēng)洞尚未啟動(dòng)時(shí)的天平數(shù)據(jù)作為天平空載基準(zhǔn)點(diǎn),用采集的2 s左右的天平信號(hào)數(shù)據(jù)的數(shù)學(xué)平均值作為天平信號(hào)零點(diǎn),將各迎角的天平信號(hào)數(shù)據(jù)減去天平信號(hào)零點(diǎn),通過(guò)天平地面靜校給出的天平公式矩陣計(jì)算得到對(duì)應(yīng)的各個(gè)時(shí)刻的天平載荷量,并結(jié)合風(fēng)洞測(cè)量得到的各個(gè)迎角下的氣流參數(shù),獲得相應(yīng)的氣動(dòng)力系數(shù)和力矩系數(shù)。
將得到的動(dòng)態(tài)氣動(dòng)力系數(shù)與力矩系數(shù)進(jìn)行周期平均處理:
式中,φ為彈體滾轉(zhuǎn)角,CN,exp(φ)、CC,exp(φ)、Cl,exp(φ)分別為試驗(yàn)中法向力系數(shù)、側(cè)向力系數(shù)、滾轉(zhuǎn)力矩系數(shù)隨φ變化的動(dòng)態(tài)數(shù)據(jù)。
2 風(fēng)洞試驗(yàn)
2.1 試驗(yàn)風(fēng)洞與模型
試驗(yàn)在中國(guó)航天空氣動(dòng)力技術(shù)研究院的FD-12風(fēng)洞中開展。風(fēng)洞試驗(yàn)段橫截面尺寸為1.2 m×1.2 m,試驗(yàn)馬赫數(shù)為Ma=2.0。
試驗(yàn)?zāi)P蜑榈湫网喪讲季中D(zhuǎn)導(dǎo)彈模型(如圖6所示),模型長(zhǎng)度為1000 mm,直徑為50 mm,長(zhǎng)細(xì)比為20。試驗(yàn)中模型的旋轉(zhuǎn)方向?yàn)轫樅较蚰鏁r(shí)針旋轉(zhuǎn)。
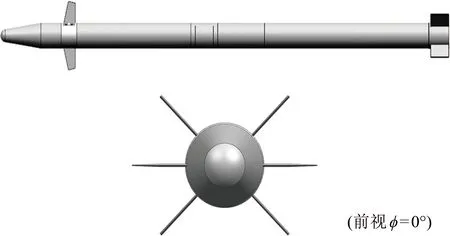
圖6 典型鴨式布局旋轉(zhuǎn)導(dǎo)彈模型
將模型與天平系統(tǒng)安裝于風(fēng)洞中,使用皮錘敲擊彈身(天平校心附近),使試驗(yàn)系統(tǒng)進(jìn)行強(qiáng)迫振動(dòng)。采集天平的動(dòng)態(tài)信號(hào),分析試驗(yàn)系統(tǒng)的固有頻率,可以得到模型與天平系統(tǒng)固有頻率為41 Hz,結(jié)果如圖7所示。
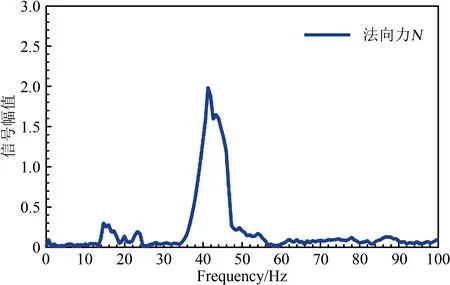
圖7 模型與天平系統(tǒng)固有頻率測(cè)試結(jié)果
2.2 模型旋轉(zhuǎn)運(yùn)動(dòng)試驗(yàn)結(jié)果
圖8給出了采用旋轉(zhuǎn)運(yùn)動(dòng)主動(dòng)控制技術(shù)與氣動(dòng)力驅(qū)動(dòng)技術(shù)得到的旋轉(zhuǎn)導(dǎo)彈風(fēng)洞試驗(yàn)?zāi)P娃D(zhuǎn)速對(duì)比。可以看出:主動(dòng)控制技術(shù)可以得到穩(wěn)定的轉(zhuǎn)速,轉(zhuǎn)速可調(diào);而利用氣動(dòng)力驅(qū)動(dòng)(采用尾翼斜置方法)模型旋轉(zhuǎn)時(shí),轉(zhuǎn)速不穩(wěn)定。大長(zhǎng)細(xì)比導(dǎo)彈模型旋轉(zhuǎn)運(yùn)動(dòng)主動(dòng)控制技術(shù)通過(guò)采用微型電機(jī)驅(qū)動(dòng)模型旋轉(zhuǎn),可以按照相似參數(shù)的要求對(duì)轉(zhuǎn)速進(jìn)行模擬,并可根據(jù)要求進(jìn)行控制,且轉(zhuǎn)速連續(xù)可調(diào),轉(zhuǎn)速可以達(dá)到20 Hz。
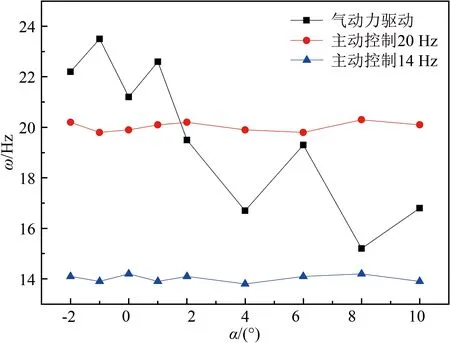
圖8 模型轉(zhuǎn)速ω隨迎角α變化的對(duì)比曲線
2.3 旋轉(zhuǎn)運(yùn)動(dòng)狀態(tài)下的動(dòng)態(tài)測(cè)力試驗(yàn)結(jié)果
圖9為旋轉(zhuǎn)導(dǎo)彈模型旋轉(zhuǎn)運(yùn)動(dòng)狀態(tài)下的動(dòng)態(tài)氣動(dòng)力風(fēng)洞試驗(yàn)結(jié)果。試驗(yàn)中控制模型穩(wěn)定旋轉(zhuǎn),轉(zhuǎn)速為14 Hz,得到不同迎角下旋轉(zhuǎn)導(dǎo)彈氣動(dòng)力系數(shù)與力矩系數(shù)隨滾轉(zhuǎn)角變化的曲線,可以看出:導(dǎo)彈模型旋轉(zhuǎn)360°,法向力系數(shù)隨滾轉(zhuǎn)角呈現(xiàn)雙周期的變化規(guī)律,數(shù)據(jù)規(guī)律性良好;側(cè)向力系數(shù)與滾轉(zhuǎn)力矩系數(shù)規(guī)律不明顯。
2.4 動(dòng)態(tài)數(shù)據(jù)周期平均結(jié)果分析
采用周期平均處理方法對(duì)得到的動(dòng)態(tài)試驗(yàn)數(shù)據(jù)進(jìn)行處理。圖10為周期平均處理后的試驗(yàn)結(jié)果重復(fù)性對(duì)比(導(dǎo)彈鴨舵固定為0°、彈體以14 Hz的轉(zhuǎn)速旋轉(zhuǎn)),圖10(a)~(c)分別為導(dǎo)彈法向力系數(shù)、側(cè)向力系數(shù)和滾轉(zhuǎn)力矩系數(shù)的處理結(jié)果,可以看出數(shù)據(jù)重復(fù)性精度良好。
圖11為周期平均處理后的不同轉(zhuǎn)速下的試驗(yàn)數(shù)據(jù)對(duì)比(導(dǎo)彈鴨舵固定為0°)。可以看出:轉(zhuǎn)速對(duì)模型法向力系數(shù)影響不大;導(dǎo)彈側(cè)向力系數(shù)呈現(xiàn)隨迎角增大而增大的趨勢(shì),在特定迎角出現(xiàn)拐折,這一現(xiàn)象主要是由于導(dǎo)彈旋轉(zhuǎn)過(guò)程中出現(xiàn)的鴨舵渦與尾翼互相干擾引起的;由于本文中導(dǎo)彈旋轉(zhuǎn)轉(zhuǎn)速較低,馬格努斯力較小,所以試驗(yàn)得到的側(cè)向力系數(shù)隨轉(zhuǎn)速變化規(guī)律不明顯;轉(zhuǎn)速對(duì)滾轉(zhuǎn)力矩系數(shù)影響較大,彈體旋轉(zhuǎn)運(yùn)動(dòng)后,試驗(yàn)系統(tǒng)得到的滾轉(zhuǎn)力矩中包含滾轉(zhuǎn)阻尼力矩,而滾轉(zhuǎn)阻尼力矩主要受轉(zhuǎn)速的影響。上述數(shù)據(jù)規(guī)律與文獻(xiàn)[14-18]在FM-3標(biāo)模動(dòng)態(tài)氣動(dòng)特性研究中得到的規(guī)律一致。
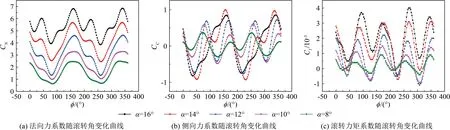
圖9 典型旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)氣動(dòng)力試驗(yàn)結(jié)果

圖10 周期平均處理后的試驗(yàn)結(jié)果重復(fù)性對(duì)比
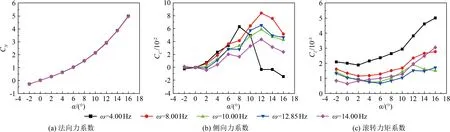
圖11 周期平均處理后的模型不同轉(zhuǎn)速下的試驗(yàn)數(shù)據(jù)對(duì)比
3 結(jié) 論
針對(duì)旋轉(zhuǎn)導(dǎo)彈設(shè)計(jì)中對(duì)地面模擬旋轉(zhuǎn)運(yùn)動(dòng)以及動(dòng)態(tài)氣動(dòng)力測(cè)量的需求,開展了旋轉(zhuǎn)導(dǎo)彈風(fēng)洞動(dòng)態(tài)測(cè)力試驗(yàn)技術(shù)的研究,研究結(jié)果表明:
(1) 在1.2 m量級(jí)的超聲速風(fēng)洞中,采用微型驅(qū)動(dòng)系統(tǒng),旋轉(zhuǎn)運(yùn)動(dòng)組件與模型進(jìn)行一體化設(shè)計(jì),可以對(duì)大長(zhǎng)細(xì)比導(dǎo)彈模型旋轉(zhuǎn)運(yùn)動(dòng)進(jìn)行主動(dòng)控制,轉(zhuǎn)速穩(wěn)定并可連續(xù)調(diào)節(jié)。
(2) 采用環(huán)形五分量天平以及動(dòng)態(tài)數(shù)據(jù)采集與處理技術(shù),對(duì)旋轉(zhuǎn)導(dǎo)彈動(dòng)態(tài)氣動(dòng)力進(jìn)行了測(cè)量,導(dǎo)彈模型旋轉(zhuǎn)360°,法向力系數(shù)隨滾轉(zhuǎn)角呈現(xiàn)雙周期的變化規(guī)律,數(shù)據(jù)規(guī)律性良好。
(3) 對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行周期平均處理,數(shù)據(jù)重復(fù)性精度良好,導(dǎo)彈轉(zhuǎn)速對(duì)縱向氣動(dòng)力影響較小。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 實(shí)驗(yàn)流體力學(xué)的其它文章
- 氣液兩相流壓差波動(dòng)信號(hào)的混沌特性及Volterra自適應(yīng)短期預(yù)測(cè)研究
- 基于圖像處理的低速橫流中液體射流軌跡提取方法研究
- 穩(wěn)態(tài)焓探針的優(yōu)化設(shè)計(jì)與試驗(yàn)驗(yàn)證
- 進(jìn)氣道風(fēng)洞試驗(yàn)分布式流量調(diào)節(jié)技術(shù)研究與試驗(yàn)驗(yàn)證
- 0.6 m連續(xù)式跨聲速風(fēng)洞軸流壓縮機(jī)布局方案研究
- 旋轉(zhuǎn)導(dǎo)彈模型非定常表面壓力測(cè)試技術(shù)研究