結(jié)合同異性度量的超像素分割方法
2020-09-23 04:16:40祁瑞光張和生
遙感信息 2020年4期
關(guān)鍵詞:方法
祁瑞光,張和生
(太原理工大學(xué) 礦業(yè)工程學(xué)院,太原 030024)
0 引言
高分辨率遙感影像廣泛應(yīng)用于農(nóng)作物產(chǎn)量評(píng)估、森林火災(zāi)檢測(cè)、地物分類(lèi)等領(lǐng)域[1]。影像分割在利用高分辨率遙感影像進(jìn)行對(duì)象分析時(shí)具有基礎(chǔ)且關(guān)鍵的作用,影像分割的質(zhì)量直接決定后續(xù)面向?qū)ο蠓治龅木萚2]。但隨著影像的分辨率增高,地物的紋理和形狀等信息也越豐富,準(zhǔn)確尋找地物邊界的難度也更大,為此尋找一種合理有效的分割方法對(duì)高分辨率遙感研究有重要意義。傳統(tǒng)的分割方法多基于像元進(jìn)行分割,如吳波等[3]提出一種基于光譜多尺度分割特征的混合像元分解方法,但空間數(shù)據(jù)冗余,會(huì)產(chǎn)生“椒鹽”效應(yīng)。面向?qū)ο蟮挠跋穹指罘椒ㄒ殉蔀楦叻直媛蔬b感影像分割的主要方法[4],如涂繼輝等[5]將建筑物頂面作為分割對(duì)象,檢測(cè)建筑物的損毀區(qū)域;巫兆聰?shù)萚6]在初始分割的基礎(chǔ)上,利用對(duì)象的光譜紋理和形狀信息進(jìn)行區(qū)域合并;Li等[7]提出一種基于邊緣檢測(cè)的分水嶺算法,利用嵌入置信度的邊緣檢測(cè)檢測(cè)對(duì)象,提高對(duì)象邊界的檢測(cè)精度。高分辨率遙感影像的應(yīng)用范圍越來(lái)越廣,傳統(tǒng)的多尺度分割方法逐漸顯示出它們的效率不足,特別是在處理大尺寸圖像時(shí)[8]。對(duì)于紋理信息豐富區(qū)域,傳統(tǒng)分割方法的分割線(xiàn)與地物邊界的貼合度不高,容易出現(xiàn)欠分割且受到影像噪聲的影響,對(duì)于顏色紋理相似區(qū)域,部分算法容易出現(xiàn)過(guò)分割。
本文提出一種在簡(jiǎn)單線(xiàn)性迭代聚類(lèi)(simple linear iterative clustering,SLIC)算法的基礎(chǔ)上進(jìn)行改進(jìn)的高分辨率遙感影像分割方法:首先用SLIC算法分割影像生成超像素;然后根據(jù)灰度離散程度將離散超像素合并到臨近最大權(quán)重的超像素;最后根據(jù)同異性度量將超像素進(jìn)行合并。通過(guò)對(duì)比幾種算法的實(shí)驗(yàn)分割效果,驗(yàn)證本文方法的有效性。
1 研究方法
本文所用分割方法:首先對(duì)遙感影像利用高斯濾波器進(jìn)行平滑,去掉噪點(diǎn);然后利用SLIC算法生成超像素,對(duì)超像素離散程度進(jìn)行評(píng)價(jià),根據(jù)灰度離散程度進(jìn)行整合,根據(jù)紋理梯度信息計(jì)算超像素的同異性度量值,由同異性程度確定最終的分割結(jié)果。方法流程如圖1所示。
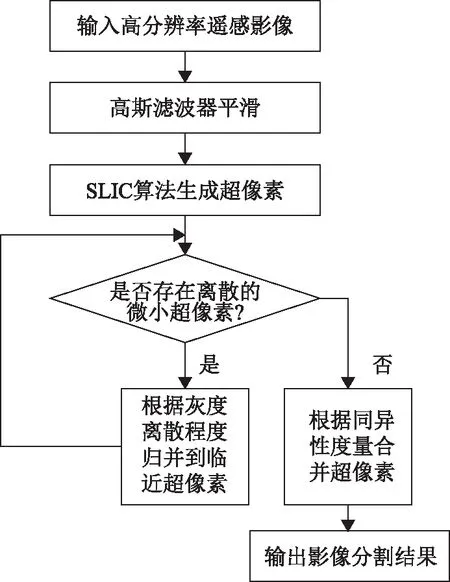
圖1 本文分割方法流程圖
1.1 生成超像素
Sun等[9]提出用超像素對(duì)高光譜影像進(jìn)行分割;Achanta等[10]利用SLIC算法生成超像素,證明SLIC超像素更加規(guī)則,與地物邊界貼合效果比以前的方法好。該算法將像素點(diǎn)的CIELAB空間色彩值l,a,b和像素點(diǎn)在影像中的位置x,y組成五維特征向量[li,ai,bi,xi,yi]T,以此作為判斷聚類(lèi)中心的標(biāo)準(zhǔn)。CIELAB空間的色彩相較于RGB空間色彩來(lái)說(shuō)更符合人眼的視覺(jué)。其特征向量中,l表示亮度;a表示從綠色到紅色的分量;b表示從藍(lán)色到黃色的分量。
傳統(tǒng)SLIC分割方法直接對(duì)原圖進(jìn)行分割,容易受到噪聲點(diǎn)的影響,致使主要地物的邊界偏移。一般影像的噪聲服從高斯分布,本文采用高斯濾波器過(guò)濾噪聲。高斯濾波器是一種線(xiàn)性濾波器,根據(jù)高斯函數(shù)形狀選擇權(quán)值進(jìn)行過(guò)濾,可以有效地抑制噪聲影響,平滑圖像。計(jì)算方法如式(1)~式(3)所示。
Ci(x,y)=Gσ(x,y)×fi(x,y)
(1)
Cj(x,y)=Gσ(x,y)×fj(x,y)
(2)
(3)
式中:Gσ(x,y)是高斯函數(shù);f(x,y)是影像點(diǎn)的坐標(biāo);σ是坐標(biāo)的標(biāo)準(zhǔn)差,代表數(shù)據(jù)的離散程度。
由圖2可知,σ越小,離邊界越遠(yuǎn)的像素權(quán)重越小,圖像平滑的效果隨之減小;σ越大,圖像平滑的效果越明顯,受噪聲點(diǎn)影響越低,但σ過(guò)大會(huì)使圖像模糊,失去邊界。
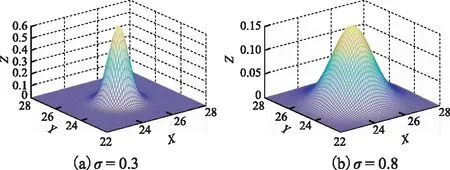
圖2 不同σ值情況下的二維高斯分布函數(shù)
用SLIC算法生成超像素的步驟如下。

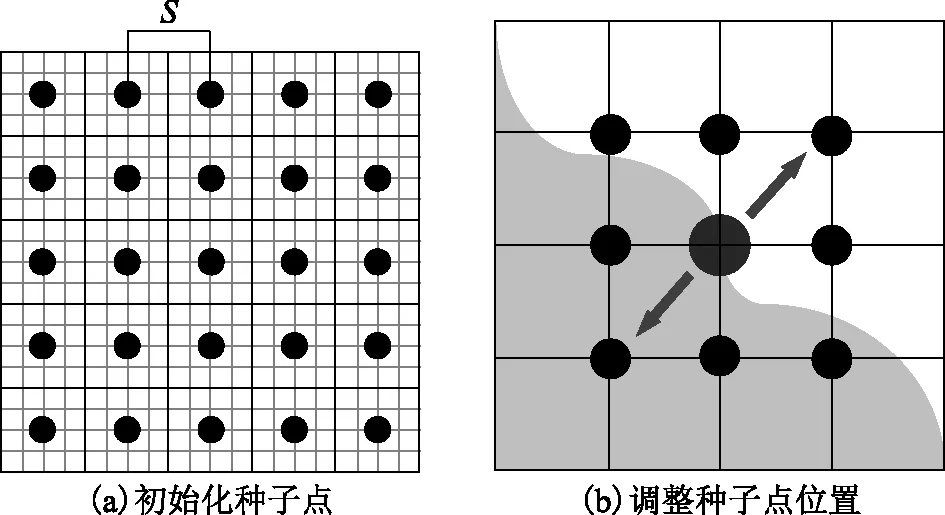
圖3 種子點(diǎn)初始化過(guò)程
2)計(jì)算相似度。種子點(diǎn)初始化后,SLIC算法通過(guò)迭代對(duì)像素點(diǎn)進(jìn)行聚類(lèi)。這個(gè)聚類(lèi)過(guò)程與K-means算法類(lèi)似,不同點(diǎn)在于:該算法像素點(diǎn)搜索的范圍是以種子點(diǎn)為中心的2S×2S范圍;而K-means算法搜索的范圍是全局,圖4顯示了二者的區(qū)別。
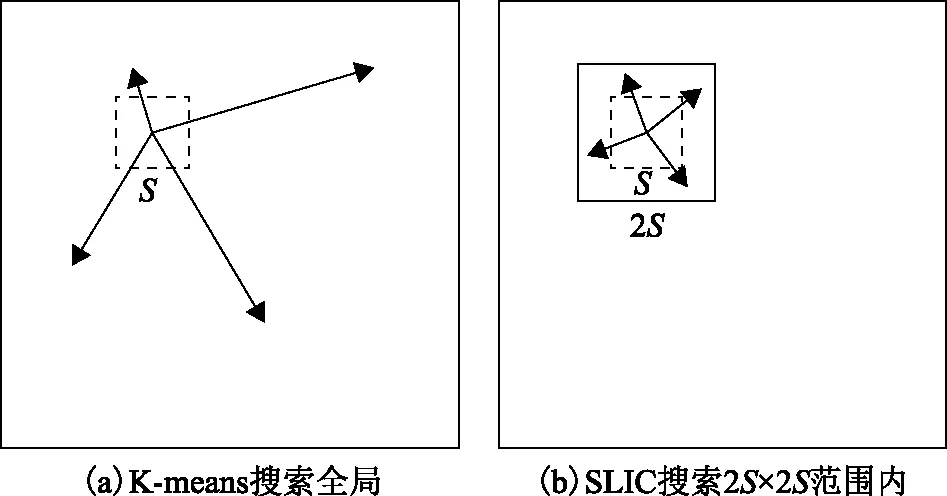
圖4 K-means與SLIC搜索范圍對(duì)比
計(jì)算出像素點(diǎn)的相似度后,將最相似的種子點(diǎn)的標(biāo)簽賦予該像素,通過(guò)不斷迭代直至收斂完成超像素分割。像素點(diǎn)與種子點(diǎn)相似度的計(jì)算如式(4)~式(6)所示。
(4)
(5)
(6)
式中:dlab為像素點(diǎn)在CIELAB顏色空間中的差異;dxy為像素點(diǎn)之間的空間距離;D為像素點(diǎn)之間的相似度;S為種子點(diǎn)之間的距離;m是一個(gè)輸入?yún)?shù),用來(lái)控制相似度公式中顏色差異和空間距離比例;k是種子點(diǎn)的標(biāo)號(hào);i是像素點(diǎn)的標(biāo)號(hào)。D的值越小,說(shuō)明2個(gè)像素點(diǎn)相似度越高。
SLIC分割生成的超像素用集合S表示,如式(7)所示。
S=∪si,i=1,2,…,K
(7)
式中:si是第i個(gè)超像素;K是超像素的總數(shù)。
3)處理離散超像素。部分生成的超像素范圍過(guò)小,對(duì)合并過(guò)程造成影響,易產(chǎn)生孤立像素。計(jì)算離散超像素部分的灰度離散程度,如式(8)所示。
Vij=|Vi-Vj|
(8)
式中:Vi表示離散部分的灰度均值;Vj表示臨近超像素的灰度均值;Vij值越小,說(shuō)明二者紋理差異越小,離散部分可歸并到臨近對(duì)應(yīng)相似程度最大的超像素。
1.2 合并超像素
同異性度量通過(guò)區(qū)域特征進(jìn)行聚類(lèi),將同異性度量小于閾值的相鄰超像素合并。同異性度量由超像素的梯度顯著性Hij和灰度同異性cij經(jīng)權(quán)重比分配計(jì)算后表示。梯度顯著性Hij由2個(gè)相鄰超像素si和sj的梯度變化程度計(jì)算得出。
對(duì)平滑后的超像素求偏導(dǎo),可以得出梯度變化的程度大小,如式(9)~式(11)所示。
(9)
(10)
Hij=|Ri(x,y)-Rj(x,y)|
(11)
式中:t是一個(gè)超像素中,計(jì)算梯度的卷積核所占區(qū)域個(gè)數(shù);Ri(x,y)是超像素si的平均梯度變化程度;Rj(x,y)是超像素sj的平均梯度變化程度;Hij就是相鄰2個(gè)超像素的梯度顯著性。圖5是經(jīng)過(guò)梯度處理后的影像。

圖5 影像梯度圖
經(jīng)過(guò)梯度處理后的影像,邊界處的梯度值絕對(duì)值要明顯大于平緩處的梯度絕對(duì)值。對(duì)比每個(gè)超像素Hij值,邊界兩側(cè)超像素的平均梯度值會(huì)出現(xiàn)明顯的變化,且Hij值較大。同一個(gè)地物對(duì)象中的超像素,平均梯度值差值不會(huì)過(guò)大[11]。
人眼對(duì)RGB敏感的比例偏向于3∶6∶1,由于浮點(diǎn)預(yù)算速度較慢,將3個(gè)系數(shù)做整數(shù)處理后,再除以1 000,轉(zhuǎn)灰度公式如式(12)、式(13)所示。
ci=R×0.299+G×0.587+B×0.114
(12)
cij=|ci-cj|
(13)
式中:ci是超像素i的灰度值;cij是超像素i和超像素j的灰度同異性。
圖6為按比例轉(zhuǎn)換成的灰度圖和相應(yīng)的灰度直方圖。
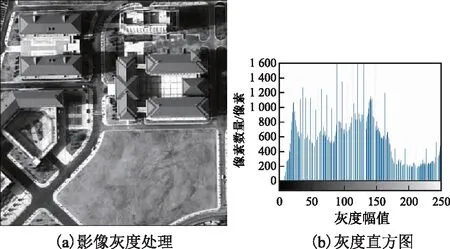
圖6 轉(zhuǎn)換后灰度圖及其灰度直方圖
對(duì)Hij和cij進(jìn)行歸一化處理,如式(14)所示。
(14)
式中:Nij為歸一化值;ω為設(shè)置RGB權(quán)重占比系數(shù)。在紋理相似區(qū)域適當(dāng)降低ω的值可以防止欠分割現(xiàn)象,在紋理復(fù)雜區(qū)域適當(dāng)提高ω的值可以避免過(guò)分割現(xiàn)象。
設(shè)ε為一常數(shù)閾值,且ε的值處在Nij的變化范圍內(nèi)。通過(guò)控制ε的大小,使同異性差異值在一定范圍內(nèi)的超像素合并到一起,達(dá)到分割影像的效果。
2 實(shí)驗(yàn)結(jié)果和分析
2.1 實(shí)驗(yàn)數(shù)據(jù)
本文使用太原理工大學(xué)校區(qū)無(wú)人機(jī)高分辨率航拍影像,如圖7所示。分辨率為0.2 m,影像大小為1 024像素×1 024像素。影像中的對(duì)象包括建筑物、道路、草地、陰影。

圖7 本文原始影像
2.2 高斯濾波器處理
經(jīng)實(shí)驗(yàn),用高斯濾波器處理時(shí),當(dāng)σ=0.9時(shí)的邊界分割優(yōu)化效果最好。
圖8中,3處箭頭的處理前后對(duì)比較為明顯。在路沿這種像素紋理較復(fù)雜的區(qū)域,高斯濾波處理后的影像的邊界更加明確,部分地面紋理與周?chē)嘟某袼剡吔缃?jīng)處理后也可以檢測(cè)出來(lái)[12]。
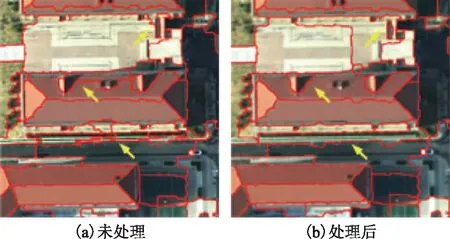
圖8 高斯濾波器處理前后對(duì)比
由此可見(jiàn),經(jīng)高斯濾波器處理后的影像在處理過(guò)程中更容易排除噪聲點(diǎn)的影響,可有效減少無(wú)規(guī)則分割的超像素的產(chǎn)生。
2.3 超像素初始分割
分水嶺算法是一種經(jīng)典的超像素算法,本文利用C語(yǔ)言程序生成SLIC超像素和分水嶺算法生成的超像素進(jìn)行比較,再和目前在面向?qū)ο蠓指罘矫嬉呀?jīng)十分成熟的軟件eCognition生成的四叉樹(shù)進(jìn)行比較,3種分割算法的比較情況如圖9所示。
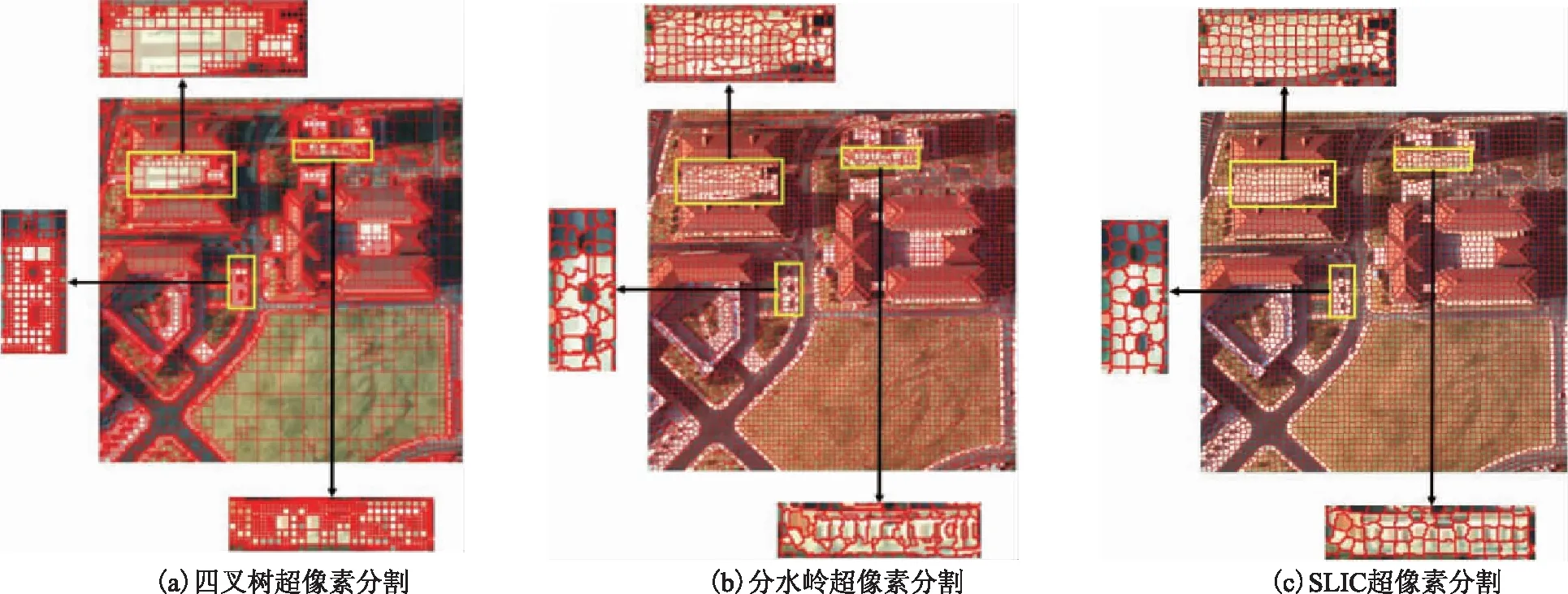
圖9 超像素分割結(jié)果
經(jīng)實(shí)驗(yàn),SLIC、分水嶺、四叉樹(shù)3種算法的分割所用時(shí)間分別為5.831 s、4.873 s、0.314 s,可見(jiàn)SLIC超像素生成耗時(shí)較長(zhǎng),但形狀更加規(guī)則,大小更加相似,不容易產(chǎn)生孤立的像素點(diǎn)。在圖9中的多處特征影像位置可看出,部分房屋地區(qū)的紋理顏色信息較為復(fù)雜,SLIC超像素比分水嶺超像素分割得更加貼合地物邊界,并且分水嶺超像素的個(gè)數(shù)無(wú)法設(shè)置,SLIC超像素可以調(diào)整至最為合適的數(shù)量。與四叉樹(shù)分割相比,四叉樹(shù)分割速度優(yōu)勢(shì)明顯,但四叉樹(shù)對(duì)于弱邊緣和嚴(yán)重凹陷邊緣不能準(zhǔn)確提出[13],SLIC超像素分割得更加平滑,分割結(jié)果更加接近真實(shí)情況,四叉樹(shù)分割的精細(xì)程度取決于四叉樹(shù)的層數(shù),生成的超像素容易忽略邊界復(fù)雜的地物,對(duì)邊界的依附性較差,且邊界的鋸齒效應(yīng)更加明顯。
2.4 合并超像素
對(duì)圖9中分割效果較好的SLIC超像素和分水嶺超像素進(jìn)行合并比較,得到最終的分割結(jié)果。
圖10(a)為多尺度算法分割結(jié)果,圖10(b)為分水嶺算法分割結(jié)果,圖10(c)為本文算法分割結(jié)果。在圖10(d)目視解譯中,未對(duì)草地進(jìn)行分割處理,避免主觀(guān)因素的影響。對(duì)分水嶺算法和本文算法進(jìn)行直接比較,可以看出:部分草地上方的道路在本文算法中可以順利合并,但在分水嶺算法中會(huì)出現(xiàn)過(guò)分割現(xiàn)象;道路的分割容易受到噪聲影響[14],部分在陰影區(qū)域的道路,本文算法可以順利將道路分割出來(lái),而多尺度算法、分水嶺算法在此區(qū)域會(huì)出現(xiàn)欠分割,說(shuō)明本文方法具有一定的抗噪能力[15]。由此可見(jiàn),在草地、廣場(chǎng)、道路等紋理顏色相似區(qū)域,本文算法可以更好地將同類(lèi)型超像素合并在一起。

圖10 分割結(jié)果比較
3 精度評(píng)定
對(duì)圖7(b)影像依次使用目視解譯、分水嶺、多尺度和本文算法進(jìn)行分割,圖11為分割結(jié)果。圖11(a)多尺度分割參數(shù)為:Scale parameter為230;Shape為0.1;Compactness為0.5[16]。圖11(b)為分水嶺分割,合并前超像素有5 232個(gè),合并后的區(qū)域有236 個(gè)。圖11(c)為本文算法結(jié)果,合并前超像素有4 300 個(gè),合并后區(qū)域有200 個(gè)。使用SSIM(structural similarity index)結(jié)構(gòu)相似性指數(shù)[17]和Kappa系數(shù)[18-19]對(duì)分割結(jié)果進(jìn)行精度評(píng)定,指數(shù)越高,說(shuō)明分割結(jié)果與預(yù)期的分割結(jié)果越相近。
由圖11可以看出,本文在陰影及道路等部分紋理相似區(qū)域的分割效果優(yōu)于其他方法。3種分割結(jié)果的精度對(duì)比如表1所示。

圖11 分割結(jié)果
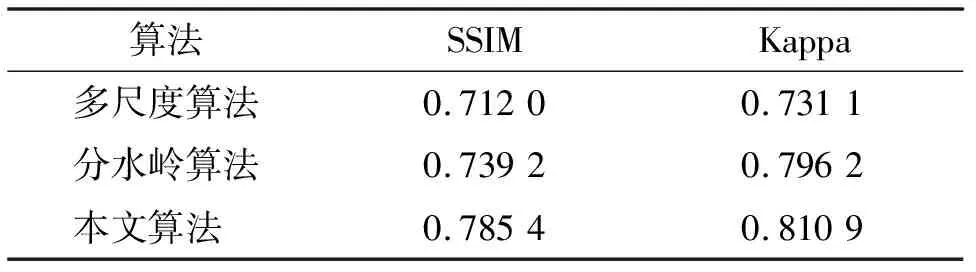
表1 分割結(jié)果精度比較
4 結(jié)束語(yǔ)
本文提出的分割方法可以通過(guò)高斯濾波器抵消噪聲點(diǎn)的影響,該方法對(duì)超像素中的梯度和紋理灰度值進(jìn)行單獨(dú)處理,更有效地將位于紋理顏色相似區(qū)域的地物提取出來(lái)。針對(duì)不同紋理的影像,相應(yīng)地分配梯度顯著性和灰度同異性的閾值,可以進(jìn)一步避免出現(xiàn)在同一地類(lèi)的過(guò)分割現(xiàn)象。與分水嶺分割和多尺度分割算法相比,該方法有效改進(jìn)了在紋理復(fù)雜和相似區(qū)域的分割效果。本文下一步將繼續(xù)對(duì)分割邊界的平滑效果進(jìn)行改進(jìn)。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
