面陣CCD 空間濾波技術測量顆粒流速度場分布
2020-09-27 08:41:28王必得何國慶趙正彪
上海理工大學學報 2020年4期
王必得, 崔 宇, 何國慶, 趙正彪, 李 然, 楊 暉
(上海理工大學 光電信息與計算機工程學院,上海 200093)
顆粒流是顆粒物質存在于自然界和工業界中最常見的一種狀態。其中,顆粒流速度作為運動特性中最基本的特征量,對于人們研究顆粒流運動機理具有重要指導意義。在顆粒流運動速度測量方面,實驗室通常使用旋轉滾筒作為研究顆粒材料一般流動特性的典型研究系統[1-3]。Pohlman等[4]曾使用粒子追蹤測速法(particle tracking velocimetry,PTV)測量滾筒中顆粒流速度以研究其中的邊壁效應影響,但是該方法需要對滾筒進行開口以獲取每個顆粒清晰的運動圖像,這就導致實驗滾筒中的顆粒無法處于連續流狀態,限制了系統對于處在連續狀態下顆粒流的分析。
空間濾波測速法(spatial filtering velocimetry,SFV)是一種可用來測量粗糙固體表面流體速度的方法[5-6]。SFV 由于不需要追蹤示蹤粒子并且只需要普通LED 光源,表現出了強大的環境適應性以及系統簡單等優點。20 世紀60 年代,Ator[7]首次提出使用SFV 對空氣中的顆粒物質進行測速研究,這項工作為此后數十年空間濾波研究工作奠定了基礎。隨著人們對SFV 的深入研究[8-9],發現電荷耦合元件(charge-coupled device,CCD)可以取代傳統結構光柵既作為空間濾波器同時又作為光電接收器件,使SFV 測速系統更加簡化。Uddin等[10]在1998 年首次提出使用線陣CCD 模擬傳統光柵,此后陸續有學者對基于線陣CCD 的空間濾波測速法進行了深入研究[11]。近年來,隨著越來越多復雜速度場測量的需要,一方面,基于線陣CCD 的測速方法需要精確測量像素陣列與運動方向的角度,而在實際測量時,由于線陣CCD 視場的局限性,無法精確像素陣列與運動方向的角度,這就導致測量結果準確性的降低;另一方面,由于面陣CCD 擁有良好的視場,使得基于面陣CCD的SFV 通過對不同方向的速度分量進行測量,進而根據速度矢量和求得速度,避免了角度測量帶來的誤差,因此面陣CCD 已經取代線陣CCD 成為現代空間濾波系統的主要器件。空間濾波測速領域最新的動態就是Schaeper 等[12]利用面陣CCD對生物細胞的運動速度進行了測量。
本文在上述內容基礎上,創新性地將基于面陣CCD 空間濾波技術應用于滾筒顆粒流的邊壁效應檢測上。不僅解決了現有的PTV 技術在滾筒研究中的局限性,避免了線陣CCD 相機視場的局限性導致的無法準確分辨拍攝區域與實際區域是否一致的問題,還可以通過對面陣CCD 劃分子濾波器對顆粒流速度場完成多點測量。本文重點研究了所設計系統參數的變化對于系統分辨率的影響,并據此分析了系統的最佳分辨率;然后,利用對于傳送帶速度的測量,標定了系統的精度;最后,將該技術應用于滾筒顆粒流表面速度場的測量,根據顆粒流速度場分布,重點研究了滾筒顆粒流表面存在的邊壁效應。
1 空間濾波測速技術
1.1 基于面陣CCD 的空間濾波測速原理
空間濾波測速原理可以通過由透射光柵引起的運動圖像的光強變化進行直觀闡釋。通常情況下,測速系統包括光源、物鏡、光柵和光電探測器。通過周期性光柵(空間濾波器)觀察運動物體所產生的光學圖像,產生的周期性信號最終被光電探測器接收。
傳統空間濾波測速系統由于結構復雜,光柵周期固定,因此不適合高精度多場景的測量。面陣CCD 由于具有更大的視場以及更靈活的周期選擇,已經被廣泛應用于空間濾波測速系統中。其原理由圖1 所示。
如圖1(a)所示,面陣CCD 上的像元接收到來自具有速度v的運動物體的散射光強信號,并采集了n幀圖像。對于信號中的橫向速度信息,首先將每幀上每列像元所包含的灰度值分別進行累加,將奇數列看作是傳統光柵的透光部分,偶數列看作是傳統光柵的遮光部分,則可模擬傳統光柵進行濾波處理,對所有幀的奇數列和偶數列的灰度值和分別進行模擬處理,即可得到一個信號序列,該序列即包含橫向速度信息,在時域上表現為具有周期性的正弦函數。對于縱向信號亦可利用同樣的方式獲得。圖1(b)顯示了信號的生成過程。由于被測物體具有持續的速度v并且周期光柵具有空間周期P,因此光電探測器的輸出信號具有一個穩定的周期T=P/v。
根據信號的周期與頻率f的關系T=1/f,最終可由式(1)分別獲得運動物體橫向和縱向的速度分量:
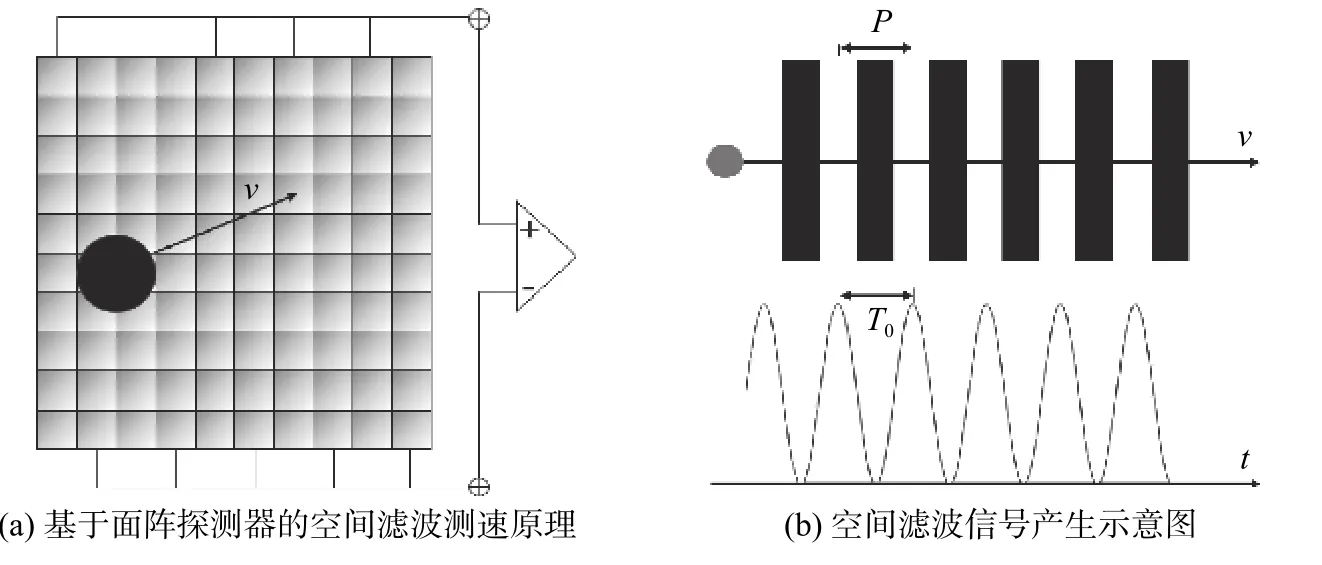
圖 1 空間濾波測速原理Fig.1 Principle of spatial filtering velocimetry
式中,M為測速系統放大倍數。通過正交矢量求和,最終可求得物體的實際運動速度。
1.2 空間濾波效應
圖1 從結構上直觀描述了空間濾波測速原理,根據分析,CCD 是整個測速系統中最重要的部分,以下將重點分析光柵結構的濾波特性[13]。
這里假設光柵透過率函數為t(x,y), 面陣CCD相機上的光強分布為d(x,y),輸出信號g(x,y)的功率譜密度函數GP(μ,γ)可由下式得到:

式中:DP(μ,γ)和TP(μ,γ)分別為光強分布d(x,y)和光柵透過率函數t(x,y)的功率譜密度函數;μ=f/v。
為簡化對于信號分析的描述,假設運動物體以速度v在x方向上運動。對式(2)進行積分,可以最終得到輸出信號在時域上的功率譜密度函數:

根據文獻[14]可知,GP(f)包含了一個尖峰頻率,通過尋找這個尖峰頻率,物體最終的運動速度可根據式(1)獲得。
1.3 實驗系統搭建
根據空間濾波測速原理以及實際測量需求,構建如圖2 所示的滾筒顆粒流測速系統。實驗裝置主要由白光光源、CCD 相機、滾筒裝置和精密轉臺組成。將裝有鏡頭的相機固定于支架上,調整拍攝角度使鏡頭垂直于滾筒顆粒的坡面。實驗系統中光源為白色LED 燈,面陣CCD 型號為千眼狼3F04M 高速相機,擁有2 320×1 720 像素,單個像素尺寸為7×7 μm。鏡頭型號為NIKON 公司的定焦鏡頭,鏡頭焦距35 mm。裝有顆粒的滾筒放置于水平轉臺,面陣CCD 對滾筒顆粒流表面進行連續拍攝,拍攝圖像通過計算機進行采集。
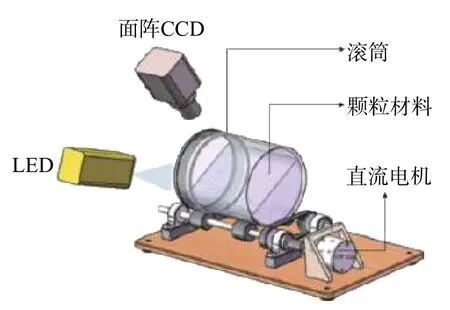
圖 2 滾筒顆粒流動層測速系統Fig.2 Velocity measurement system of granular flow in the rotating drum
本文將結合上述基于面陣CCD 的空間濾波測速法對滾筒顆粒流速度場進行測量,并據此對表面邊壁效應作出進一步分析。實驗所使用的滾筒為有機玻璃材質,直徑為140 mm,長度為200 mm,通過直流電機驅動;使用的顆粒為直徑1 mm 的玻璃球。
2 實驗系統參數分析
2.1 系統標定
為了驗證所搭建實驗系統算法的有效性,評估采用面陣CCD 測量系統的精度。首先,使用空間濾波測速系統對勻速運動的傳送帶進行測量。系統將面陣CCD 和鏡頭固定在一個支架上,調整拍攝角度,保證面陣CCD 測量像素平面平行于皮帶運動平面,選取合適的拍攝高度與焦距獲得皮帶的測量圖像。圖3 為面陣CCD 拍攝到的傳送帶的原始圖像。為驗證面陣CCD 測速不受擺放角度影響,首先調整傳送帶與面陣CCD 的角度θ,分別以不同角度拍攝圖像,進行測速;為同時驗證將面陣CCD 分割為多個子濾波器實驗多點測量方案的合理性,選取S1,S2,S3 這3 個區域作為子濾波器,分別進行測速。
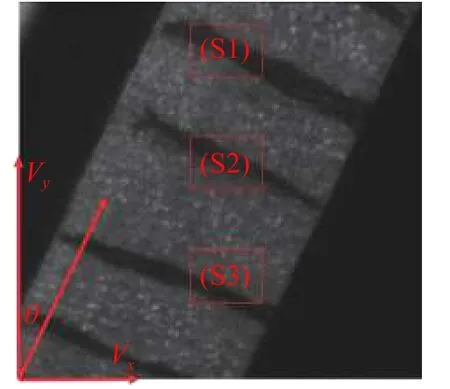
圖 3 面陣CCD 采集傳送帶原始圖像Fig.3 Original image collected by array CCD for the conveyor belt
實驗設定傳送帶速度V為1~9 cm/s,以1 cm/s 的步進值共計9 個速度值,θ取30°,45°,60°,3 個不同角度進行測量。以下所有數據均為多次測量的平均值。測量誤差的計算公式為Error=(Vx-V)/V,其中,Vx是速度測量值,V為傳送帶標準速度值。表1 為對S1 區域分別取30°,45°,60°,3 個不同角度計算出的速度的對比數據。可以看出3 組數據最大誤差小于2%,優于傳統線陣CCD 測量結果[11]。表2 為30°時,S1,S2,S3,3個區域測量結果對比。根據測量數據發現3 個區域測量速度大小基本一致,證明了面陣CCD 空間濾波測速系統多點測量的可能性。
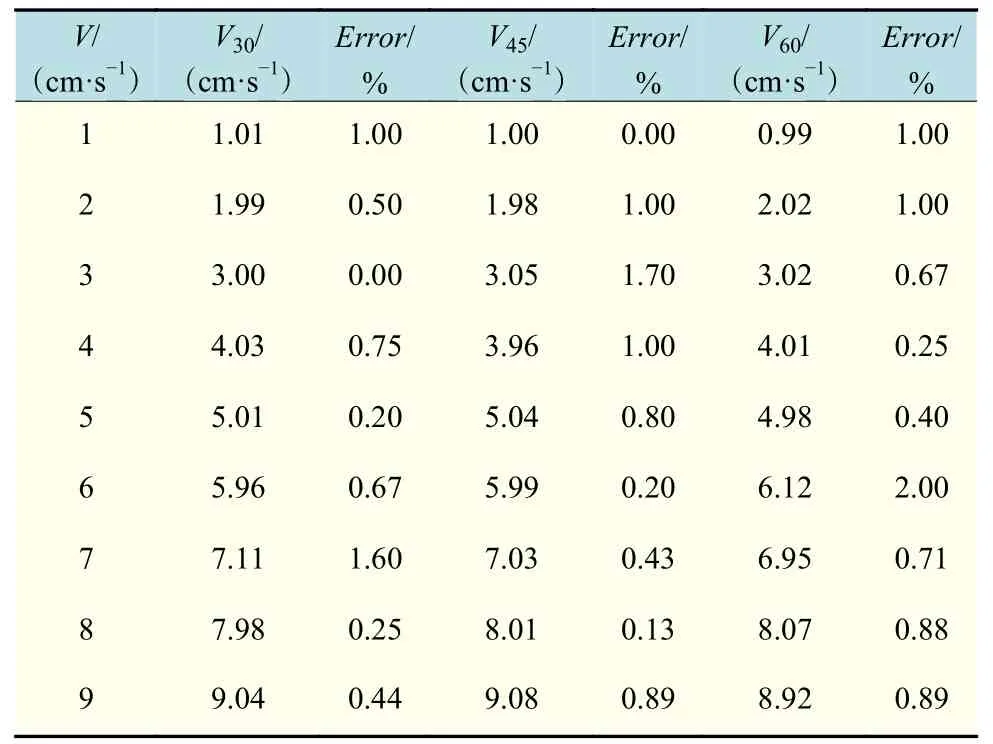
表 1 多角度測速對比結果(S1 區域)Tab.1 Comparison results of several angle velocity measurements (area S1)
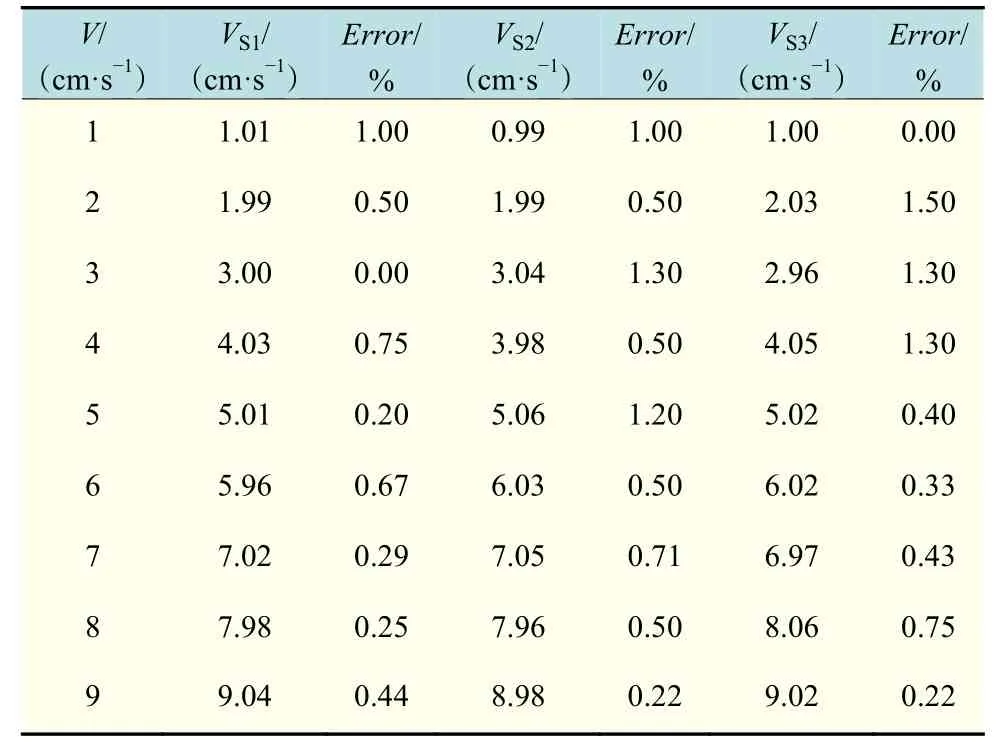
表 2 多個子濾波器實驗多點測量方案結果(30°)Tab.2 Comparison results of multi-point velocity measurement (angle 30°)
2.2 系統分辨率
根據空間濾波測速實際要求,首先確定測速系統分辨率。系統分辨率具體包括時間分辨率Rt與空間分辨率Rs。時間分辨率與相機幀速率F成反比關系,即Rt=1/F,空間分辨率的主要影響因素包括空間周期P與光柵個數n,三者關系為Rs=nP。
幀速率為實驗所用相機的可調參數。幀速率越高,兩幀圖片時間間隔越短,輸出信號連續性越好,最終所得滾筒顆粒流表面速度場越精確,可測的速度范圍也更大。但是一方面,絕大部分CCD 相機幀速提高的代價是畫幅大小,考慮到本文待測顆粒流速度場的面積以及實時性的測量需求,不可能使用相機理論上的最大幀速;另一方面,通過對40%填充度、3 r/min 轉速的顆粒流速度場進行測算發現,當幀速率達到1 000 fps 時,已經可以準確觀察到輸出信號的頻譜圖的峰值頻率,如圖4 所示。此時即實驗系統的最佳時間分辨率,為0.001 s。
理論來說,當光柵間隔大小約等于所測區域特征點(光斑)大小時,輸出光強信號周期性最好[15]。在滾筒顆粒流測速系統中,由于不存在實際光柵,而是使用面陣探測器模擬傳統光柵,這就給設定空間周期提供了便利。分析本次實驗實際所拍圖像,觀察特征點大小在50~60 μm。因此將空間周期設定為100~120 μm(狹縫間隔為50~60 μm)可輸出較理想的波形。當空間周期P一定時,模擬光柵條紋越多,光敏感區域就越大,光敏感區域的大小直接影響空間濾波器的濾波效果,主要表現在空間濾波后信號的幅值與主峰帶寬上:n越大,濾波后信號主峰幅值就越大,易于尋峰;同時,n越大,信號主峰的帶寬也越窄,分辨率就越高。但隨著n的增大,單次測量區域就越大,可測量點減少,空間分辨率降低,同時測量精度降低。對滾筒同一位置,取相同的空間周期,對不同的狹縫個數進行多次實驗。如圖5 所示,在狹縫個數較少時,測量值與真實值偏差較大,隨著狹縫個數的增多,測量值趨于平穩。綜合上述因素,本文設定n=10 較為合適。此時,系統的空間分辨率為1 mm。
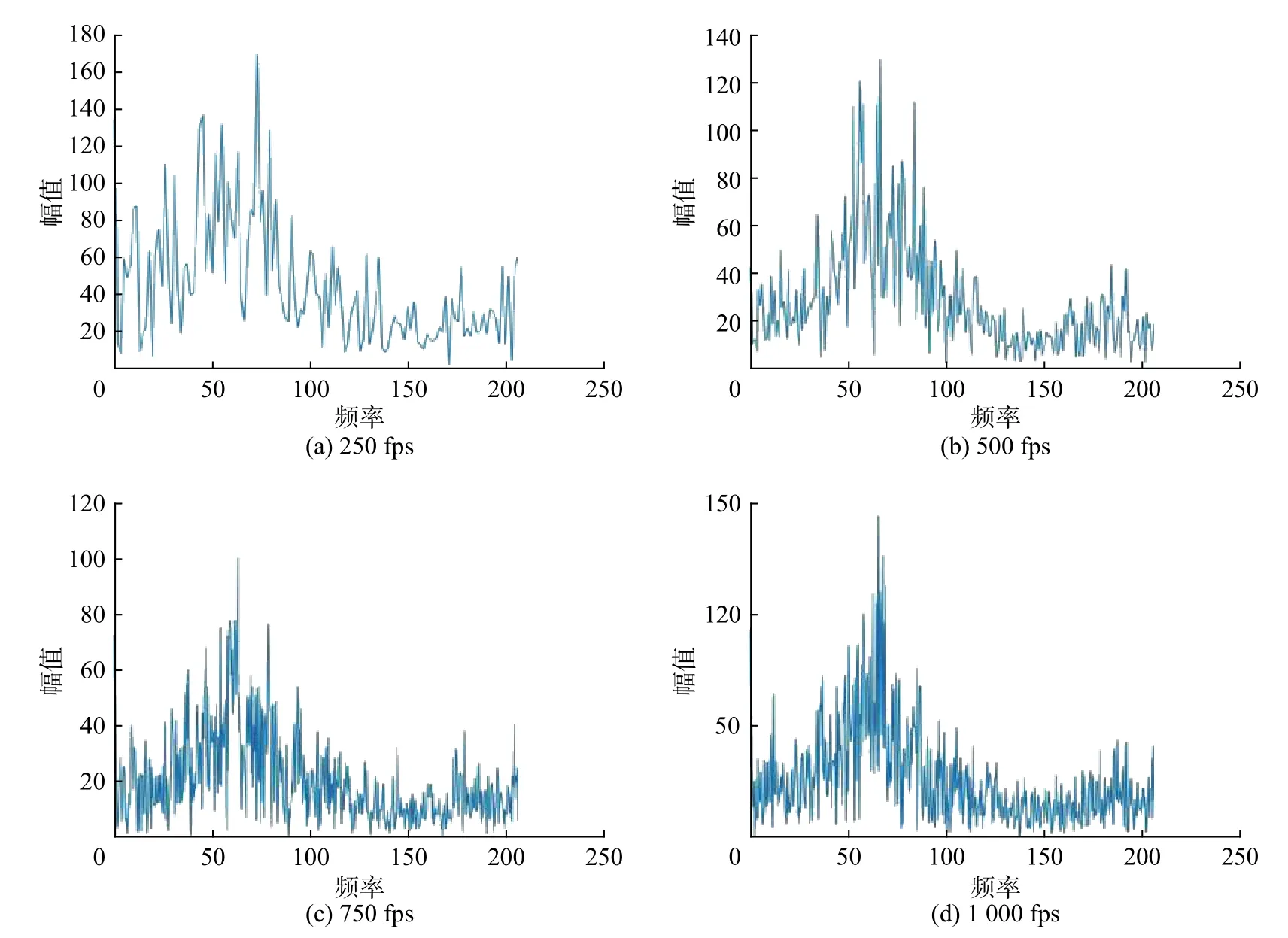
圖 4 不同幀速下輸出信號頻譜Fig.4 Output signal spectrum at different frame rates
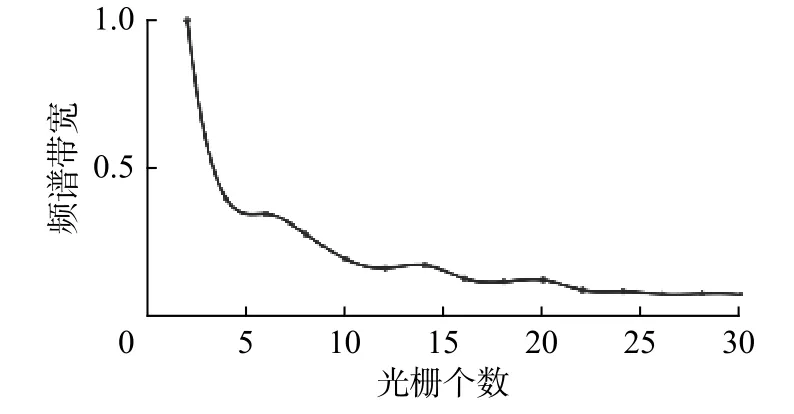
圖 5 不同光柵個數下信號主峰頻譜帶寬Fig.5 Spectral bandwidth of output signals under different grating numbers
3 實驗結果與討論
在滾筒顆粒流處于連續流狀態下,顆粒流的橫向速度相對于縱向速度幾乎可以忽略不計,因此,后續所有實驗均統計縱向速度。
3.1 滾筒中顆粒流速度場分布與邊壁效應
圖6 為滾筒顆粒流動層的速度場分布,為直觀觀測顆粒流表面軸向區域速度分布變化,圖中已經通過每一軸向的最大速度對所有軸向區域進行了歸一化處理。當裝有顆粒的三維滾筒保持連續流持續旋轉時,其靠近端壁區域的顆粒流會產生一個向滾筒中心區域凹陷的運動軌跡,滾筒端壁對顆粒的摩擦力在這里產生了巨大的影響。觀察顆粒流速度場分布可以發現:軸向速度分布并不均勻,端壁區域顆粒流速度明顯小于遠離端壁區域顆粒流速度;軸向區域的峰值速度也沒有出現在滾筒中心區域,而是出現在距兩端壁稍遠的位置。
為研究滾筒顆粒流速度沿軸向變化情況,選取圖6 黑色方框典型速度分布區域對邊壁效應進行分析,提取速度曲線如圖7 所示。根據曲線,顆粒流表面軸向區域分為三個部分。滾筒端壁區域的顆粒流速度要小于遠離端壁區域顆粒流的速度,這是由于端壁摩擦力導致該區域顆粒流速度減小,而遠離滾筒區域顆粒流并未受到摩擦力影響,速度明顯大于端壁附近顆粒流速度。該部分區域為邊壁摩擦區域。在距離滾筒端壁稍遠位置區域有一個峰值速度vmax出現,這是由于滾筒端壁的摩擦力導致端壁區域顆粒流速度小于遠離端壁區域的顆粒流速度。根據質量守恒定律,端壁附近顆粒流將補償遠離端壁的流速較快的顆粒流,端壁附近顆粒流從而會產生一個軸向速度,軸向速度與徑向速度的和速度將會使得端壁區域顆粒流斜向滾筒中心區域運動,該運動速度與顆粒流原本運動速度產生疊加,從而導致了峰值速度vmax的出現。該峰值速度所在區域為峰值速度區域。在距離端壁更遠處軸向速度將趨于平緩,該部分區域受到邊壁效應影響程度很小,速度介于端壁附近速度與峰值速度之間,為平穩區域。
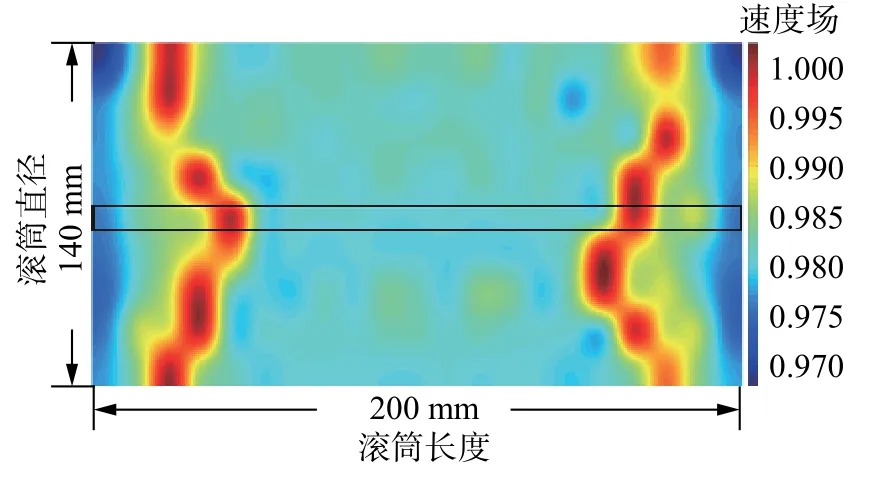
圖 6 2.5 r/min 轉速、40%填充度下,滾筒顆粒流表面速度場分布Fig. 6 Granular flow velocity distribution in the rotating drum at 2.5 r/min, 40% filling degree
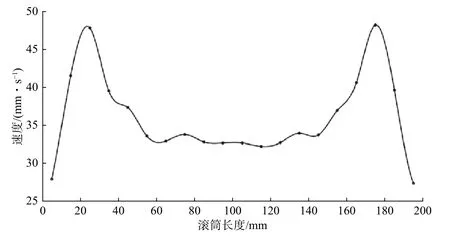
圖 7 圖6 黑色方框區域滾筒顆粒流的速度分布Fig.7 Velocity distribution of granular flow in the black square area in fig. 6
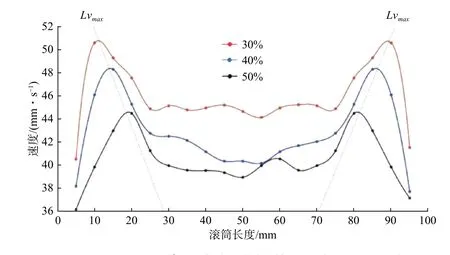
圖 8 3.5 r/min、不同填充度條件下滾筒中軸區域顆粒流的速度分布Fig.8 Velocity distribution for different filling degrees at 3.5 r/min
3.2 不同填充度下的顆粒流邊壁效應
對于填充度變化對于邊壁效應的影響,實驗考慮30%,40%,50%這3 種不同填充度下的中心軸向區域的縱向速度對比。如圖8 所示,改變填充度將顯著影響峰值速度的位置,當填充度變大時,峰值速度點Lvmax將更加靠近中心位置。這是由于當填充度增大時,顆粒流動層與筒壁的接觸面積隨之增加,使得筒壁對于邊壁區域顆粒流的摩擦力增大,從而使得顆粒流產生了更大的橫向速度,橫向速度和縱向速度的疊加最終導致了峰值速度區域位置的移動。
4 結 論
在現有的一些非接觸式測速方法中,空間濾波法由于具有精度高、采用非相干光源、結構簡單等優點成為了當下滾筒顆粒流速度場測量的主要方法,本文從結構裝置和數學原理兩方面深入分析了空間濾波測速原理,對現有線陣CCD 空間濾波測速法進行了改進,提出了基于面陣CCD 空間濾波的滾筒顆粒流測速方法,得出以下結論:
a. 通過實驗數據結合理論分析發現,本文所設計的面陣CCD 空間濾波系統的最佳時間分辨率為0.001 s,最佳空間分辨率為1 mm。根據傳送帶速度測量對系統進行標定,發現誤差小于2%,優于線陣CCD 空間濾波法。
b. 面陣CCD 良好的視場使得對滾筒顆粒流整個表面測量成為可能,所采用的正交算法避免了傳統線陣CCD 空間濾波法的角度測量帶來的誤差。
c. 根據所測的滾筒顆粒流表面速度場分布,結合歸一化處理,發現由于邊壁效應的存在,滾筒顆粒流表面橫向區域根據速度不同分為邊壁摩擦、峰值速度、平穩3 種區域。當滾筒內填充度變大時,峰值速度位置相應地更加靠近滾筒中心位置。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52