高分七號激光測高儀激光光斑特性初探
2020-09-27 01:18:06中國科學院上海技術物理研究所中國科學院空間主動光電技術重點實驗室劉智慧黃庚華廖陽陽謝鋒
中國建設信息化 2020年17期
文|中國科學院上海技術物理研究所、中國科學院空間主動光電技術重點實驗室 劉智慧 黃庚華 廖陽陽 謝鋒
0 引言
高分七號衛星(GF-7)于2019年11月3日在太原成功發射,它是我國首顆亞米級高分辨率光學傳輸型立體測繪衛星,也是民用測圖精度最高的衛星,主要載荷于11月5日在軌開機工作并下傳數據。GF-7搭載了具有全波形記錄能力的對地觀測激光測高儀,該激光測高儀采用雙波束激光測高,并首次配備了足印相機分別對兩束激光光束成像,可輔助確定光斑位置;GF-7激光測高儀還配置了監視相機對兩束發射激光成像,可輔助分析激光指向的穩定性。美國地球科學激光高度計系統(GLAS)搭載的激光參考相機對發射脈沖成像得到激光參考陣列(LPA)影像,LPA記錄了GLAS發射激光脈沖的能量分布,監視相機的作用與LPA有相似之處,可用于分析GF-7兩束發射激光光束的能量分布、指向穩定性等,對分析激光測高儀在軌運行狀態具有重要意義。本文對GF-7地面研制和初始在軌運行時監視相機圖像中發射激光光斑特性進行初步探索分析,主要包括激光光斑質心穩定性、光斑分布范圍穩定性,以期為激光測高儀在軌運行狀態分析與數據應用提供參考。
1 研究方法
監視相機圖像中發射激光光斑特性分析流程圖如圖1所示。

圖1 監視相機圖像中發射激光光斑特性分析流程圖
1.1 監視相機圖像光斑區域提取
監視相機圖像大小為550×550像素,發射激光光斑在圖像中占比較小,以兩個發射激光光斑的初始光斑中心最大值為基準,在行列方向上分別擴展20個像素形成40×40像素的圖像區域,在該區域內進行光斑特性初步分析。
1.2 閾值分割
閾值分割的目的是提取出用于分析激光光斑特性的區域,閾值的確定采用迭代選取法。首先提取激光光斑圖像的最大值DNmax和最小值DNmin,設定初始閾值

以初始閾值將激光光斑圖像分為背景和目標兩部分,再分別計算背景和目標區域像素均值Pback和Pobj,重新計算閾值
以Tk+1為閾值進行圖像分割,然后再重新計算Pback和Pobj,迭代進行此過程直到Tk和Tk+1的差值小于某個設定值或達到最大迭代次數,根據此時的閾值對激光光斑圖像進行分割得到光斑區域,該區域外的像素值賦值為0。
1.3 質心提取
光斑質心提取對于激光光軸穩定性分析有重要意義。常用的中心定位方法可分為基于灰度和邊緣擬合兩大類。基于灰度的常見方法是灰度質心法,基于邊緣的方法包括圓和橢圓擬合法。本文利用灰度質心法和橢圓擬合法分別計算激光光斑的質心,對比不同方法得到的質心穩定性。
灰度質心法主要是以灰度作為權重計算光斑的質心,其計算公式如下:

橢圓擬合法根據激光光斑邊緣數據,通過最小二乘法對邊緣進行橢圓擬合,橢圓中心為質心位置。橢圓的參數方程可表示為公式(5)

其中,xc、yc表示中心位置,a、b表示長短半軸,θ表示橢圓離心角,α表示橢圓旋轉角。利用非線性最小二乘優化邊緣點與擬合曲線正交距離的平方和,得到參數方程的各參數,進而確定光斑的質心。
2 實驗分析
本文中采用2019年9月27日地面研制階段和2019年11月5日衛星初始在軌運行測試階段的兩個數據包作為分析數據。衛星在發射與在軌運行過程中因受振動、重力和熱環境變化等因素的影響,激光光軸可能發生變化,表現為激光光斑質心位置的變化,而穩定性是體現載荷運行狀態的重要指標。GF-7激光測高儀采用雙波束模式,監視相機對兩束發射激光光斑成像,本文中地面和在軌運行數據的發射激光光斑均未達到飽和狀態,圖像連續無異常。
2.1 激光光斑圖像
地面研制階段監視相機圖像中波束1激光光斑區域和波束2激光光斑區域相對于整體監視相機圖像左上角像素位置(1,1)的位置分別為(286,51)和(133,201)。衛星初始在軌運行測試階段監視相機圖像中波束1激光光斑和波束2激光光斑圖像相對于整體監視相機圖像左上角像素位置(1,1)的位置分別為(291,42)和(138,209)。圖2所示分別為地面研制階段和衛星初始在軌運行測試階段監視相機圖像中激光光斑1和激光光斑2,從圖中可以看出,激光光斑的形態有微小變化。
2.2 質心穩定性
質心穩定性是激光光軸穩定性的直觀表現,不同質心提取方式得到的質心位置稍有差別,但是通過對序列質心位置進行統計分析能夠反應出質心位置的總體穩定情況。表1是用兩種質心提取方式對539幀地面和242 幀在軌監視相機圖像進行質心提取的統計結果。
從圖2和表1可以看出,(1)在軌運行測試階段的質心位置與地面測試階段相比發生了變化;(2)兩種質心提取方法對同一數據包中監視相機圖像提取的同一光斑質心位置差異較小,一定程度上反應了監視相機圖像噪聲是比較小的;(3)衛星在軌運行后兩束激光x、y 方向的穩定性在都在0.4個像素內,質心穩定性良好,系統在軌運行平穩。
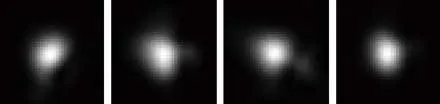
圖2 激光光斑(a)地面激光光斑1(b)地面激光光斑1(c)在軌激光光斑1(d)在軌激光光斑1

表1 光斑1和光斑2 質心位置統計結果
2.3 參與計算的像素數
采用閾值分割確定參與光斑特性計算的圖像像素,該像素數反應光強分布范圍及足印的面積。對監視相機圖像統計參與質心計算的像素數,結果見表2。

表2 參與計算的激光光斑像素數
從表2可見,兩個激光器參與計算的激光光斑像素數比較穩定。在地面研制階段,激光器1的光強集中且穩定,初始在軌運行時,激光器1具有更好的穩定性,激光器2的光強分布更加集中。
3 結論
采用激光測高儀地面研制階段和初始在軌運行測試階段監視相機圖像數據,采用迭代選取法計算閾值確定光斑區域,通過灰度質心法和橢圓擬合法分別提取激光光斑質心,對同一數據同一光斑兩種方式提取的激光光斑質心位置差異較小;初始在軌運行時質心穩定性在0.4個像素內;統計參與質心計算的像素數,該像素數比較穩定。綜上,衛星受發射過程震動、重力釋放、溫度變化的影響,光軸指向、分布范圍雖發生變化,但初期在軌運行時激光光斑質心、光斑面積穩定性高,設備運行狀態良好。本文分析采用的是地面研制階段和激光測高儀初始開機運行時數據,其中地面研制階段數據與設備發射前狀態有可能存在差異,激光初始在軌運行環境也可能未穩定,激光測高儀的連續運行狀態需依據序列在軌數據展開,也是后續研究工作的重點。
