基于工控業務仿真的高交互可編程邏輯控制器蜜罐系統設計實現
2020-09-29 06:56:38趙國新丁若凡游建舟呂世超孫利民
計算機應用 2020年9期
趙國新 ,丁若凡,游建舟,呂世超,彭 鋒,李 菲,孫利民
(1.北京石油化工學院信息工程學院,北京 102617;2.北京化工大學信息科學與技術學院,北京 100020;3.中國科學院信息工程研究所,北京 100089)
0 引言
隨著“中國制造2025”的推進,傳統工業開始了信息化、數字化、智能化的產業升級。與此同時,隨著大量工業設備不可避免地接入互聯網,工業控制系統信息安全也面臨著日益嚴重的挑戰和威脅[1]。自2010 年震網事件以來,工控信息安全問題一直備受國內外各界關注。從國家互聯網應急中心[2]發布的《2017 年中國互聯網網絡安全報告》可知,世界各國越來越重視工控網絡信息安全。基于工控安全領域相關研究[3-4]表明,為了應對互聯網中潛在的威脅,僅僅依靠被動防御是不夠的,應用蜜罐技術進行主動防御是工控安全防護領域的殺手锏[5-6]。
蜜罐技術是一種安全威脅的主動檢測技術,它通過設置誘餌性質的虛擬系統來吸引攻擊者入侵并對其進行攻擊捕獲。蜜罐技術在近十幾年內呈現交互能力由低到高、兼容功能由少到多的趨勢。事實上,蜜罐的分類方式最常用的是按照其與外界的交互能力分為低、中、高交互蜜罐,其區別在于提供交互的空間是否覆蓋完整的操作系統。
由于工控系統的設計封閉性和架構特殊性,上述以通用服務器為對象的分類標準難以評估工控的過程控制特性。因此,本文從架構特點出發,劃分了工控設備的交互層次,提出一種新的工控蜜罐分類方法。低交互工控蜜罐具備網絡層的基礎協議棧的通信能力。中交互工控蜜罐具備操作系統層指令模擬能力,如開機關機、代碼上傳/下載等。高交互工控蜜罐具備生產現場業務過程控制的仿真能力。
基于上述分類標準,本文設計并實驗驗證了一種可編程邏輯控制器(Programmable Logic Controller,PLC)蜜罐框架,主要工作如下:
1)設計了基于工控業務仿真的PLC 蜜罐系統框架,由工控業務模塊、數據轉存模塊和信息服務模塊三部分組成。
2)提出了工控私有協議的解析與模擬方法,實現了S7comm 私有功能拓展。通過與西門子S7-300 PLC 設備的交互實驗結果,新增了11種S7comm私有功能。
3)提出了Simulink 的工控業務實時仿真方法,其提供的仿真數據與S7comm 私有功能相互協同,有效實現控制指令的執行與響應。在交互層次上貫穿了信息域和物理域,大大增強蜜罐的業務真實度和可靠性。
1 相關工作
國內外各信息安全領域的研究者一直致力于蜜罐技術的發展。2004 年Cisco 公司以honeyd[7]為基礎首先實現了具有Modbus 服務的工控蜜罐系統[8]。2011 年Tamminen[9]提出的Kippo 是一款基于Python 并支持多操作系統的蜜罐工具。2013 年Glastopf 蜜網項目[10]發布了首個開源工控蜜罐框架Conpot,使用Python 編寫,主要實現了對Modbus、S7comm、簡單網絡管理協議(Simple Network Management Protocol,SNMP)、超文本傳輸協議(HyperText Transfer Protocol,HTTP)等多種工控協議和互聯網協議的仿真。2014 年Buza 等[11]實現的CryPLH以S7comm服務為基礎,擴展實現了SNMP、HTTP服務,增強了蜜罐的交互性。2015年實現的Cowrie[12]是Kippo的繼承者,擴展了對安全拷貝協議(Secure Copy Protocol,SCP)、安全外殼協議(Secure SHell,SSH)文件傳輸協議(SSH File Transfer Protocol,SFTP)和Telnet 協議的支持。2016 年Lau等[13]提出的XPOT實現了對Nmap等系統指紋識別工具的欺騙,作者指出如果能結合工業過程模擬,會進一步提升蜜罐的交互性。同年Litchfield 等[14]提出了HoneyPhy,該框架考慮了信息物理系統(Cyber-Physical System,CPS)過程和設備的行為,進行了簡單的理論驗證和實驗。2017 年Kyung 等[15]提出一種基于軟件定義網絡(Software Defined Network,SDN)的蜜網系統HoneyProxy,支持低高交互蜜罐動態轉換。而國內對蜜罐技術的研究起步較晚,北京大學計算機研究所“狩獵女神”項目組于2004 年開始捕獲并深入分析攻擊案例。近年來,中國科學院信息工程研究所研究并實現了針對電力系統的IEC104 規約蜜罐、人機接口(Human Machine Interface,HMI)電力調度系統蜜罐等與行業緊密結合的蜜罐。
從工控特有的分類看,上述工控蜜罐主要在信息域交互方面進行拓展和開發,或僅實現了理論設計,未實現有效的實驗驗證和應用部署。因此,現有工控蜜罐工作應當被歸類為中交互工控蜜罐,主要缺乏物理域交互能力。
2 高交互PLC蜜罐系統架構設計
針對現有工控蜜罐存在無法與攻擊者交互,或者有交互但數據、系統可信度低的問題,本文基于工控業務仿真的固有特征,設計了一種高交互PLC蜜罐系統架構,為蜜罐通信提供真實的實時生產數據和生產環境來欺騙攻擊者,從而在全新領域實現了蜜罐的交互能力突破。
如圖1 所示,本文設計的高交互PLC 蜜罐總體架構分為信息服務仿真模塊、過程控制仿真模塊和數據轉存模塊3 個部分,數據流動分為服務仿真循環和過程仿真循環兩條路線。
信息服務仿真模塊通過部署Conpot 蜜罐來仿真西門子S7-300PLC 設備,使用Conpot 內置的S7comm 服務器與外界進行交互,并以此為基礎開發實現了多種S7comm 私有服務的仿真。S7comm 私有服務仿真能夠根據攻擊者的請求,調用相應函數,通過讀取數據轉存模塊中實時生產數據庫里的數據并組入響應數據包,或者將攻擊者提供的控制指令寫入實時控制數據庫,以滿足交互需求。本模塊與數據轉存模塊之間的數據流通構成了服務仿真循環。
過程控制仿真模塊對燃氣管網過程進行了仿真建模。通過在Simulink 中運行該仿真模型,系統能夠生成實時生產數據,并通過仿真傳感器實時輸出,最終寫入到數據轉存模塊的實時生產數據庫中;同時該系統具備仿真的閥門輸入接口,會接收實時控制數據庫實時發送的數據作為系統的控制信號。本模塊與數據轉存模塊的數據流通構成了過程仿真循環。
數據轉存模塊是上述兩個模塊的交互中轉站,也是兩個數據仿真循環的核心。數據轉存模塊中建立了兩個不同的數據庫,分別為實時生產數據庫和實時控制數據庫,使用腳本程序來實現一系列讀取、存儲和發送的功能。通過這里的數據存儲、流通,信息服務仿真模塊能夠讀取到過程控制仿真模塊的實時生產數據,過程控制仿真模塊也能夠根據信息服務仿真模塊下達的實時指令改變生產狀態,以此實現了控制過程仿真運行狀況的閉環邏輯。
3 關鍵技術
3.1 S7comm私有協議解析與實現方法
S7comm 協議是西門子S7 系列PLC 內部集成的一種私有不公開協議,屬于傳輸控制協議/網際協議(Transmission Control Protocol/Internet Protocol,TCP/IP)協議族的一種。它運行在應用層中,經過特殊優化,用于西門子設備之間或者與外界進行通信。S7comm 協議常用的通信方式是基于以太網的客戶端/服務端模式:PLC 設備作為服務端,接收外界訪問請求數據包并執行相應服務,返回響應數據包;外界訪問者作為客戶端,與PLC進行通信,發送請求數據包并接收響應數據包。本文針對Conpot 的S7comm 服務器進行了深度開發,從協議仿真的角度開發實現了更多S7comm 私有服務功能,從而符合本文設計的PLC蜜罐系統的需求。
3.1.1 S7私有協議的解析和模擬
S7comm 協議不同設備間使用S7 數據包進行通信。如圖2 所示,S7 數據包使用了多種協議進行協議數據單元(Protocol Data Unit,PDU)封裝,S7 數據在經過面向連接的傳輸協議(Connection-Oriented Transport Protocol,COTP)協議和應用程數據傳輸協議(ISO transport services on top of the TCP,TPKT)協議打包后,由TCP/IP協議進行連接和輸送。

圖2 S7comm協議包頭格式Fig.2 S7comm protocol packet header format
如圖3 所示,S7comm 協議服務端和客戶端之間的通信流程分為三次握手。第一次握手是經過客戶端和服務端COTP請求與應答,建立基于國際標準化組織傳輸協議(International Organization for Standardization_Transport Protocols,ISO_TP)的連接;第二次握手進行S7 通信設置,建立S7comm 連接;第三次握手進行S7comm 服務的應答交互,最終服務端會生成基于特定S7comm 私有功能的響應數據包返回給客戶端。

圖3 S7comm協議通信流程Fig.3 S7comm protocol communication process
根據以上對S7comm 協議通信三次握手原理的解析,Conpot 通過對S7 通信系統中服務端功能進行模擬,建立了S7comm 服務器。如圖4 所示,其處理信息的流程主要分為以下幾步:
1)S7comm 服務器從Conpot獲取執行流,與客戶端建立連接。然后,進入會話處理流程,開始循環接收數據包,為客戶端提供服務。
2)S7comm 服務器會接收握手信息的前四個字節:如果接收的數據為空,S7comm 服務器會結束本次會話;否則,會接收握手信息的剩余信息。然后,S7comm 服務器會解析包頭,提取出length 參數,用于判定是否是非法的S7comm 數據包請求。
3)S7comm 服務器完成第一次握手,建立ISO_TP 連接。ISO_TP握手信息的標識tpdu_type參數值為0xe0,只有通過本次握手,ISO_TP連接才能建立起來。
4)S7comm 服務器完成第二次握手,建立S7comm 連接。S7comm握手信息的標識tpdu_type參數值為0xf0,只有通過本次握手,S7comm連接才能建立起來。
5)S7comm 服務器開始第三次握手,開始接收S7comm 的數據循環。服務器解析TPKT 和COTP 層數據,當請求數據的tpdu_type 參數值為0xf0 時,表明該PDU 是通信數據(而非握手信息),S7comm 會解析此數據并據此生成響應數據包;然后,將響應數據包發送給客戶端,完成第三次握手;最后,S7comm服務器會準備接收本次會話的下一個數據包。
S7comm 服務器具備完整的信息交互機能,通過扮演PLC設備的角色來取信于外界攻擊者。除此之外,S7comm 服務器還集成了日志記錄功能,研究者可以通過分析日志來獲取攻擊者信息、研究攻擊模式、提升防護能力。
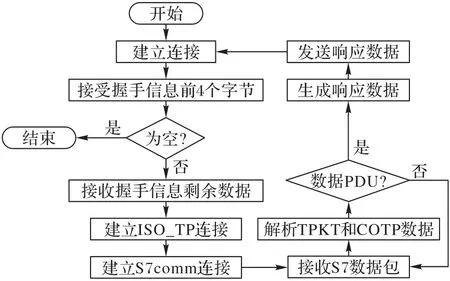
圖4 Conpot中S7comm服務器工作流程Fig.4 Workflow of S7comm server in Conpot
3.1.2 新增S7comm私有功能
S7 功能碼是S7comm 協議數據包中用來標明自身所代表何種S7comm 私有功能的數字碼,每個功能碼代表一種S7comm 私有功能。在Conpot 的S7comm 服務器通信過程中,當客戶端向服務端發送請求數據包時,數據包中S7Data 包含的功能碼將告訴服務端需要執行的是哪種服務。服務端會據此調用不同的功能碼程序來產生特定數據。這些數據經過處理后會被組入響應數據包,最終返回給客戶端。
Conpot雖然搭建了S7comm 服務器的交互框架,卻并沒有廣泛地實現S7comm 協議內的諸多S7comm 私有功能。目前為止,S7comm 協議中解析了12 種主功能碼,20 種次級功能碼,而Conpot除了簡單的次級功能“讀取系統狀態列表”外,其余功能碼對應的S7comm 私有功能均未實現,因此實際上無法正常進行S7 通信,也就無法返回攻擊者客戶端正常的響應數據包。
2019 年游建舟等[16]關注并初步進行了S7comm 私有功能的開發工作,本文在其基礎上進行了進一步的方法整理和代碼重構。如表1 所示,通過與真實PLC 設備做交互實驗,在Conpot中新增了11種S7comm私有服務。
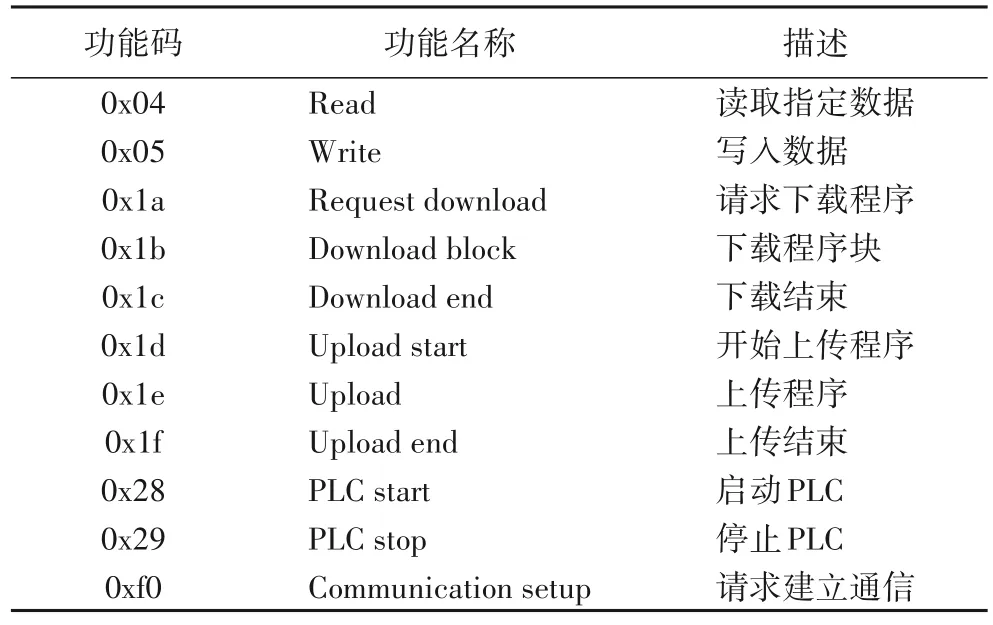
表1 在Conpot中新增的S7comm服務器功能碼Tab.1 New S7comm function codes added in Conpot
S7comm私有功能擴展的開發流程如下:
1)主機PC 連接西門子S7-300PLC。其中PC 的IP 要與PLC配置在同一網段內。
2)根據S7comm 協議的握手機制向PLC 發送包含待實現功能碼的三段請求數據包,建立S7comm通信。
3)用wireshark抓取PLC設備的響應數據包。
4)分析Conpot 源碼中對S7 數據包的解析過程,對執行程序進行修改和完善,確保其對新增S7comm 私有功能的兼容性。
5)基于之前捕捉到的PLC的響應,在S7comm服務器中添加實現對應功能碼的數據生成器。其任務是根據功能碼對應的不同S7comm 私有功能,輸出特定parament 值和data 值,將其寫入S7data,再交給S7comm 客戶端中其他模塊進行進一步的協議封裝。
在設置對應S7comm 私有功能的功能碼響應數據時,單純的信息重放是不足以欺騙攻擊者的,需要根據數據包字段結構來對響應數據包進行編輯。以Read 功能碼和Write 功能碼為例,通過上述流程,獲得其響應數據包如下:
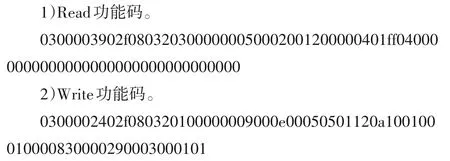
表2 分別是其數據包字段解析示例,前者由服務端輸出蜜罐能夠提供給攻擊者的信息,后者由客戶端輸入攻擊者想要寫入的信息。本文選擇Read 和Write 功能碼進行深度解析,為蜜罐系統建立了讀取數據、控制數據的功能,不僅在S7comm 私有服務方面具備功能協同性,也在現有系統框架下,將真實攻擊者與PLC 的通信邏輯納入了物理域的信息交互之中。

表2 Read和Write功能碼響應數據包的字段解析Tab.2 Field analysis of response package of Read and Write function code
3.2 基于Simulink的以太網通信與控制
為了提升信息服務仿真模塊中S7comm 私有服務仿真的真實性、在過程控制仿真模塊里提供實時更新動態的生產數據,并在蜜罐系統內構建模擬真實生產現場PLC的工作過程,需要使用Matlab/Simulink 來搭建實時仿真系統。Simulink 是Matlab 中的一種可視化仿真工具,自帶種類繁多、功能強大的模塊庫,被廣泛應用在系統建模、數據處理和業務仿真中。
仿真系統使用了多個關鍵組件,來實現過程業務仿真模塊與其他模塊的數據實時交互傳輸。
To Instrument 組件用于將Simulink 中的數據輸出到外界設備中,在仿真系統中用于模擬傳感器,將工業過程產生的各項實時數據發送到數據轉存模塊中的實時生產數據庫。如表3 第一部分所示,To Instrument 支持對通信協議、地址、端口、數據類型、緩沖區大小、傳輸間隔、傳輸格式等進行設置以滿足系統需求。
Query Instrument 組件用于在Simulink 中接收外界信號。在仿真系統中用于模擬系統總閥,控制系統緊急停車。如表3 第二部分所示,與To Instrument 組件類似,同樣需要進行相應預先設置。
Real-time sync 組件用于Simulink 中仿真系統的實時化處理,通過引入此組件,Simulink 系統的仿真運行速度會與外界物理時間保持一致(而不是在幾秒內運行完畢全部仿真流程),從而模擬工業現場實時產生數據并接收控制的過程,使得整個PLC蜜罐系統的數據流轉更加真實。
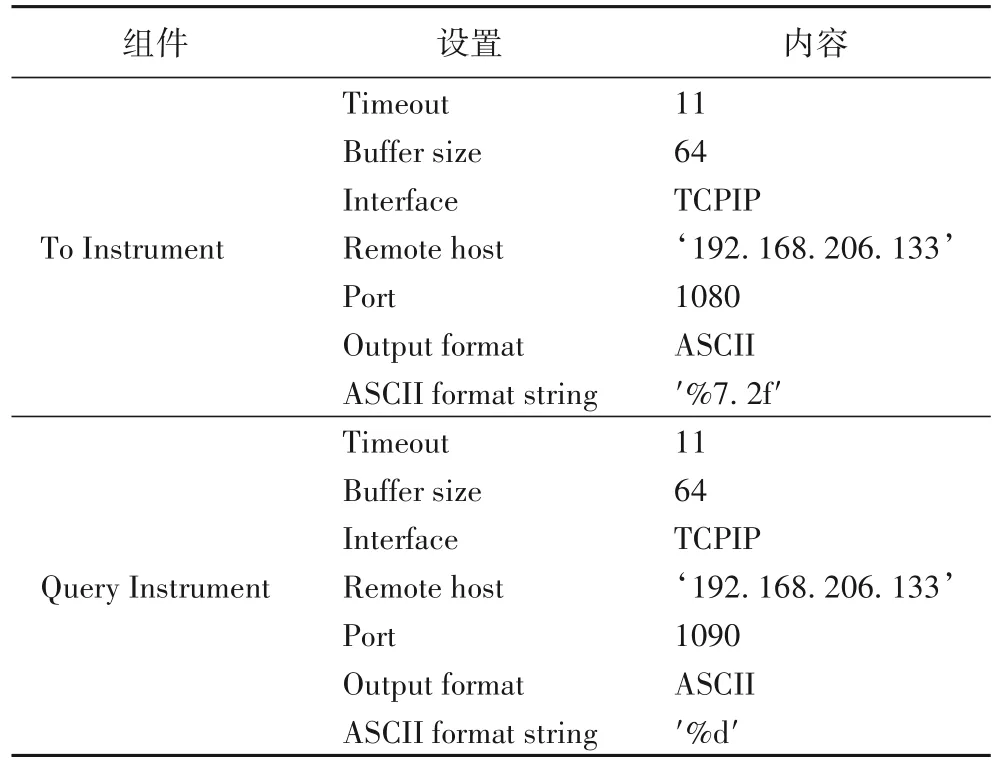
表3 To Instrument和Query Instrument組件設置Tab.3 Settings of To Instrument and Query Instrument components
4 系統實現
本文構建的高交互PLC 蜜罐系統以開源蜜罐Conpot 和Simulink 仿真器為基礎,基于S7comm 私有功能開發和工控業務仿真,采用信息服務仿真、數據轉存、過程控制仿真三模塊體系,通過模塊間的信息交換,實現了具備高交互性和高仿真度的PLC蜜罐系統。
4.1 過程控制仿真模塊
過程控制仿真模塊使用Matlab/Simulink 搭建了燃氣管網仿真系統。燃氣管網是一個由多過程組成的燃氣輸送控制系統,包括高壓、中高壓、低壓三部分,通過監測并控制不同階段的壓強、流速、溫度保持穩定預設值,最終輸出標準狀態的燃氣到用戶家中。
在Simulink中搭建的燃氣管網仿真系統架構如圖5所示。
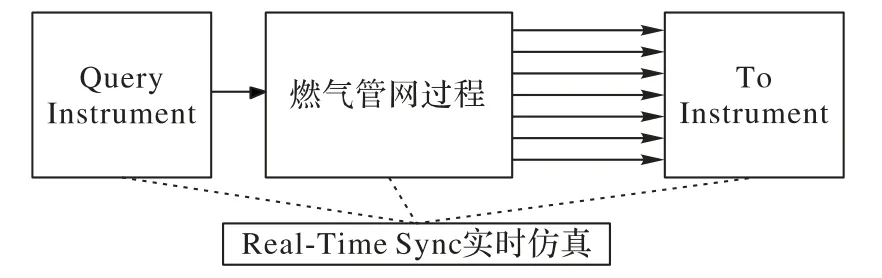
圖5 燃氣管網仿真系統架構Fig.5 Simulation system architecture of gas pipe network
通過不同組件之間的相互協作,結合過程模擬、通信交互、實時仿真三種功能,最終實現了接收實時控制信號、輸出實時生產數據的功能。燃氣管網過程組件內集成了燃氣管網系統生產過程仿真的諸多物理特性,包括高中低壓三部分傳遞函數構建、干擾量模擬、開關選擇模擬等,當仿真系統運行正常時,該過程能夠產生7 個持續、實時輸出的數據流,分別為運行過程中不同的流量、溫度、壓強值。To Instrument 組件采集以上燃氣管網系統產生的數據,并通過TCP/IP 協議將其輸出到數據轉存模塊的實時生產數據庫中,實現了本模塊系統傳感器的功能。Query Instrument組件接收數據轉存模塊通過TCP/IP 協議發送的實時控制指令流,然后將其輸入到燃氣管網過程中,只要控制指令不變,運行狀態就不會變;一旦外部輸入的控制指令流發生變化,燃氣管網過程的運行狀態和輸出數據也會隨之變化,其實現的是本模塊系統總閥的功能。Real-time sync 組件負責整體系統的實時化,這使得該工業過程的仿真和通信行為都是實時進行的,符合蜜罐系統的設計要求。
4.2 數據轉存模塊
數據轉存模塊的腳本使用python3語言編寫,調用的核心庫是Socket和MySQL,通過搭建、操作數據庫并與其他模塊進行通信,實現了接收、存儲生產數據和調用、發送控制指令流的功能。
實時生產數據庫存儲著系統的實時生產數據,程序腳本會通過Socket 庫與過程控制仿真模塊的To Instrument 組件相連接,并接收其輸出的生產數據;然后經過一定的格式化處理,通過SQL 語句將其存入數據庫內。由于數據的產生和傳輸是實時的,因此實時生產數據庫中的數據是實時變化更新的最新數據。
實時控制數據庫存儲系統的實時控制指令。與實時更新數據的實時生產數據庫不同,實時控制數據庫的數據并非實時輸入,而是實時輸出。實時控制數據庫會使用Socket腳本,對過程控制仿真模塊中的Query Instrument 組件實時發送內部存儲的數據作為控制指令,從而為工業過程提供了持續的閥門信號。
4.3 信息服務仿真模塊
在Ubuntu 系統內以S7-300 模板部署二次開發后的Conpot 蜜罐,以此模擬西門子S7-300 PLC 與外界攻擊者進行通信,從而實現系統所需的信息服務。
在交互過程中,Conpot 的S7comm 服務器在執行Read 功能碼對應的S7comm 私有服務時,預設的腳本函數會使用SQL語句讀取數據轉存模塊中的實時生產數據數據庫;同樣,在執行Write功能碼對應的服務時,預設的腳本函數會使用SQL語句來將數據轉存模塊中實時控制數據庫的數覆蓋為新的數,從而控制過程控制仿真模塊。
5 實驗測試與分析
5.1 實驗環境
本文通過控制網仿真攻擊來測試高交互PLC蜜罐系統的連通性和工作邏輯。如表4 所示,實驗設備分為蜜罐設備和測試設備,通過以太網進行通信。高交互蜜罐系統部署在蜜罐設備內,其中信息服務仿真模塊和數據轉存模塊位于虛擬機,過程控制仿真模塊位于宿主機。測試設備為同一IP 段內的獨立計算機。
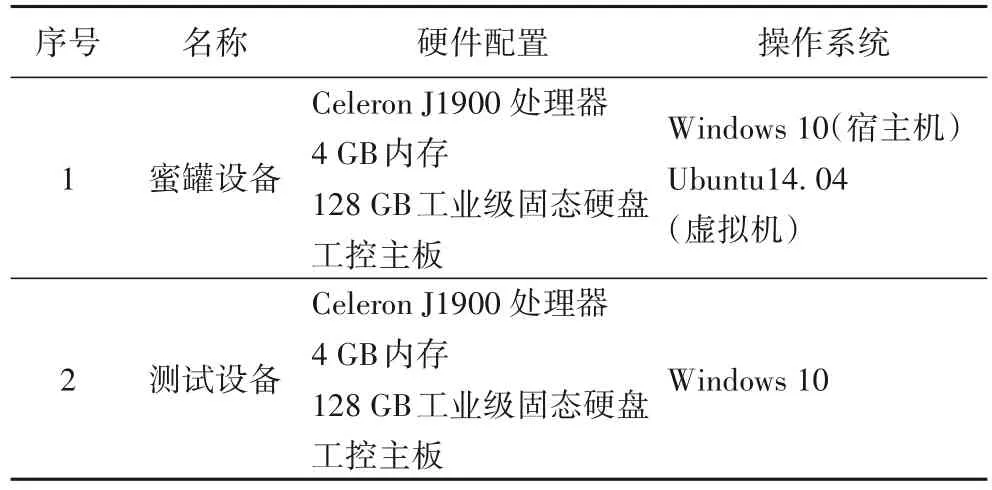
表4 實驗環境配置Tab.4 Configuration of experimental environment
5.2 控制網攻擊測試
控制網攻擊測試的主要目的是驗證蜜罐系統的信息域交互能力。將測試設備與蜜罐設備的以太網輸入端口相連,利用Nmap 探測腳本分別進行了設備操作系統指紋識別、系統探測。然后測試S7comm 私有服務實現情況,以“0x28 PLC start”為例,向蜜罐設備發送基于真實設備反饋信息的數據包,如圖6 所示,蜜罐系統能夠識別出數據包請求的S7comm私有服務為“28”并返回對應響應數據包。經完整測試,蜜罐系統支持表1中列舉的全部11種S7comm私有服務。

圖6 蜜罐系統日志Fig.6 Log of honeypot system
5.3 業務邏輯測試
業務邏輯攻擊測試的主要目的是驗證蜜罐系統的物理域交互能力。在虛擬機內以S7-300 模式部署定制版Conpot,運行信息服務仿真模塊主程序和數據轉存模塊中主程序,在宿主機中運行Simulink實時仿真,開始更新實時數據。
如圖7 所示,測試設備對蜜罐系統進行了完整測試來驗證其連接穩定性和功能協同性。考慮到過程控制仿真模塊中信號的復雜多樣,以總閥(圖8)和管道壓強值PT2的全過程狀態(圖9)為例展示蜜罐系統中的運行狀態。
在716 s 前,過程控制仿真模塊持續正常運行。在此間,測試設備通過使用包含Read 功能碼的請求數據包Read_1 向蜜罐系統發起第一次通信,請求讀取PLC 的I 區實時數據,得到系統返回的響應數據包。響應數據包的實時數據來自過程控制仿真模塊,在數據轉存模塊模擬真實PLC 的I區7通道數據格式進行格式化組合,為28 位7 通道十六進制數“557931e12af52eec13dd2808244b”,這段正常I 區數據作為S7data攜帶的PLC的I區數據的一部分被組入響應數據包。
在716 s 時,測試設備使用包含Write 功能碼的數據包向蜜罐系統發起第二次通信,請求寫入控制指令,得到寫入成功的響應數據包,這表示攻擊者已成功劫持了PLC 輸出。此時數據轉存模塊發送出去的控制指令也隨攻擊指令發生了變化,可見圖8 中過程控制仿真模塊的總閥信號由0 階躍為1,閥門由開啟轉為關閉,過程控制仿真模塊的生產狀態立即發生變化,圖9 中PT2 輸出值發生突變,系統的正常運行遭到破壞,開始輸出失常的實時數據,直至仿真結束。
在716 s 后,再次使用包含Read 功能碼的數據包發起第三次通信,請求讀數據,得到過程控制仿真模塊生產癱瘓狀態下系統返回的響應數據包,此時接收到的數據已變為失常I區數據“00000000000000000000027c024e8”,可見其中末位2個通道值保持穩定(溫度為室溫不變),其余過程量歸零,這表示系統傳感器輸出異常,攻擊者據此可知生產過程遭到了破壞。
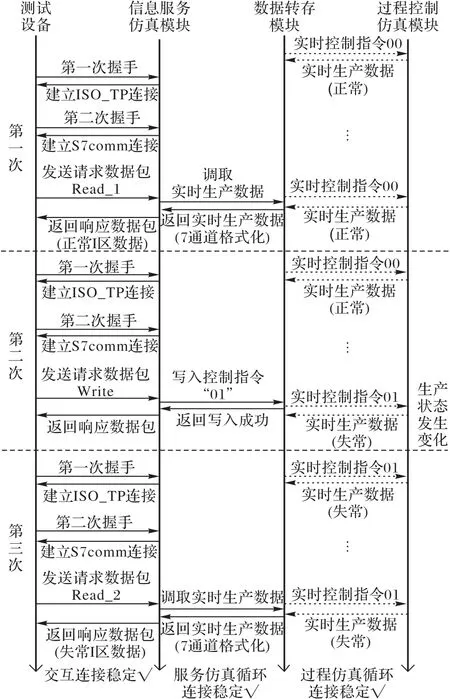
圖7 高交互蜜罐系統測試流程Fig.7 Test process of high-interaction honeypot system
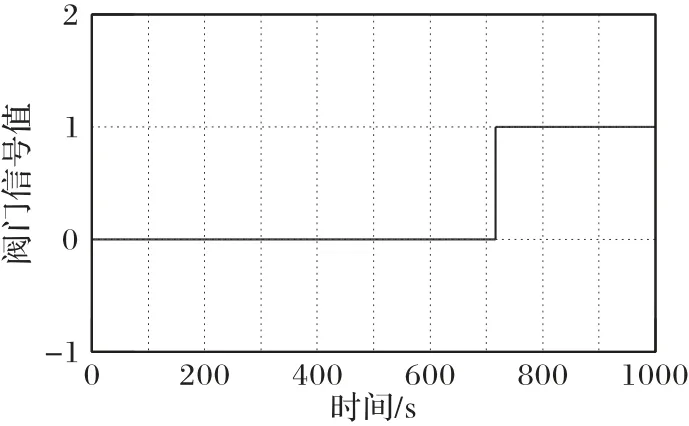
圖8 仿真期間總閥信號狀態圖Fig.8 Signal state diagram of main valve during simulation
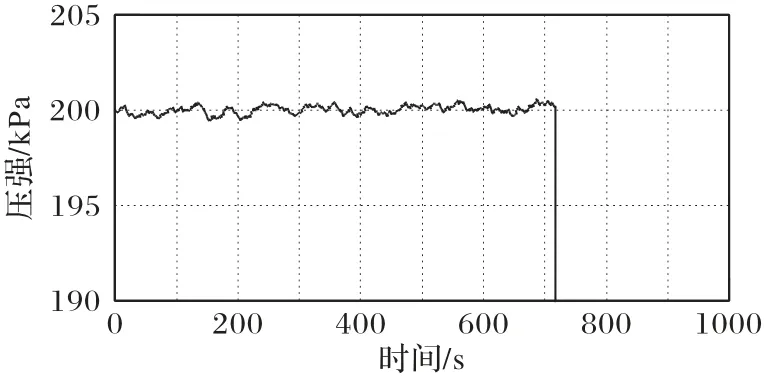
圖9 仿真期間管道壓強PT2信號狀態圖Fig.9 Signal state diagram of pipe pressure PT2 during simulation
通過以上測試可知,本文設計的高交互PLC 蜜罐系統各模塊能穩定工作,內部連接和對外交互運轉正常,多次通信證實了蜜罐系統實現的不同S7comm 私有服務在迎合攻擊者的行為方面配合默契,邏輯嚴密,具備良好的協同性。其仿真工業過程提供的實時生產數據和可供破壞的生產環境形成的物理域交互循環對只接觸過信息域交互蜜罐的攻擊者來說更具誘騙性。綜上可得出結論,本文設計的高交互PLC 蜜罐系統達到了引言中提出的高交互的指標。相較于以往的中低交互工控蜜罐,本文所設計的PLC蜜罐系統具有顯著的突破性。
6 結語
蜜罐技術是對抗日益猖獗的互聯網威脅建立的防御手段,由于傳統工控蜜罐交互能力的局限和輸出信息的隨機化,不具備足夠的真實性和欺騙性。本文針對此問題,提出了一種結合工控業務仿真的高交互PLC蜜罐系統搭建方法。當攻擊者對基于工控業務仿真的高交互PLC 蜜罐系統進行攻擊時,其不僅能夠獲取到實時更新的生產數據,還能夠控制PLC蜜罐輸出對生產系統寫入數據來造成生產停車,完成邏輯閉環的蜜罐系統也因此具備更高的誘騙性。相較于傳統低交互、中交互蜜罐,本文提出的蜜罐系統發展了新的交互層次,在信息域交互的基礎上不僅拓展了物理域的業務邏輯支持,交互形式也更加立體、豐富、真實。
本文的研究目標集中于Simulink 仿真系統與定制Conpot蜜罐的數據交換框架、S7comm 私有功能的擴展和S7comm 協議數據包的字段解析上,沒有針對PLC程序的控制、解析進行研究,此外由于使用了預設的攻擊腳本,沒有進行廣泛的攻擊行為描述,這是未來研究的方向。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20