基于二進制粒子群算法的植保無人機跟蹤
2020-09-29 13:10:50劉云潺
無線電工程 2020年10期
劉云潺,高 聰
(黃河水利職業技術學院,河南 開封 475004)
0 引言
隨著航空技術的發展,逐漸在農業植保方面進行無人機操作。植保無人機具有操作穩定、不會產生漂移現象、在空中可長時間懸停優點,提高農作物病蟲害防治水平,同時也可以大面積、短時間內增強農業抗風險能力,為智慧農業可持續發展提供了強有力的支持[1]。
跟蹤測量植保無人機的方法在硬件方面采用慣性傳感器(Inertial Measurement Unit,IMU),但是這種傳感器價格較高,不利于無人機在農業工程方面的實際推廣,若直接購買商用IMU,成本更高。目前主要是通過對無人機算法方面進行研究來達到實時跟蹤,算法主要有:Danelljan[2]通過生成模型方法提升訓練跟蹤樣本的多樣化,目標函數進行了完善和改進,減輕了形變情況對性能的影響,但計算過程復雜,跟蹤速率較低。Zuo和Wang[3]基于神經網絡和反步控制技術提出了一種考慮輸出約束的自適應軌跡跟蹤控制方法。傳統通過調制特征提取來分析信號的特征,但是需要先補償機身分量[4],對信號特征的參數估計獲得調制線頻譜、調制周期等主要參數,通常利用多個調制周期的長停留時間以確保參數估計的準確性,考慮到實際的時效性,一般不采用該方法。Srinvias[5]等人提出自適應遺傳算法(Adaptive Genetic Algorithm,AGA),在遺傳算法的基礎上通過自適應調整來滿足無人機的跟蹤需求,同時該方法比標準粒子群算法在處理時間方面有了顯著性提高,但是在算法后期由于遺傳特性的限制更容易陷入局部最優;Jain[6]利用某些非線性函數的特性,通過粒子交叉以及變異機制對粒子群算法優化,但是交叉以及變異機制沒有通過多個函數控制,使得進化的隨機性無法滿足,在粒子早熟現象控制方面仍然不足。
本文在粒子群算法的基礎上,提出二進制粒子群算法,對粒子位置進行編碼,同時利用sigmoid函數優化粒子群,從而避免了粒子群早熟現象的發生,仿真實驗驗證了本文方法對植保無人機跟蹤的有效性。
1 二進制粒子群優化算法描述

(1)



(2)
為防止Sigmoid函數飽和,可以將粒子的速度設定在一定范圍內[-Vmax,Vmax]。在本文中,令Vmax=3,對應的Sigmoid函數修改為:
(3)
2 基于二進制粒子群算法的植保無人機跟蹤
2.1 植保無人機目標機動模型
當地面控制與植保無人機相離較遠時,跟蹤預警系統啟動,地面控制利用被動傳感器對目標運動方向進行測量[13-14]。設地面控制初始位置為(xo,yo,zo),植保無人機目標在t1時刻的位置為(x1,y1,z1),做勻速直線運動v,運動方向的單位向量為L=(l,m,n)T,其中,l=cosαsinβ,m=cosαcosβ,α表示目標航跡方向的俯仰角,β表示植保無人機航跡方向的方位角[11-12]。在ti時刻空間目標的位置為(xi,yi,zi),地面2.4 GHz的無線電波裝置測量到植保無人機目標方向上的單位向量為L=(li,mi,ni),跟蹤植保無人機目標與紅外裝置的距離為Ri,則植保無人機運動模型為:
(4)
2.2 觀測模型
空中植保無人機目標由位置和速度組成,其狀態轉移矩陣F(w)、干擾轉移矩陣G和觀測矩陣H分別為:
(5)
(6)
(7)
狀態噪聲協方差矩陣為:
Q=
(8)
ω趨近于0時目標做近似直線運動,ω>0時目標做角速度為ω的左轉彎運動,ω<0時目標做角速度為ω的右轉彎運動。
這時,空中植保無人機目標機動觀測得到:
(xi,yi,zi)′=(xi,yi,zi)+σ·ξ,
(9)
式中,σ為目標航向均方差;ξ為(0,1)之間的正態分布隨機數。
構造參量加權最小二乘目標函數對目標測量估計為:
(10)
使Q最小的航跡方向即為估計方向。
2.3 二進制粒子群算法對植保無人機跟蹤實現過程
設二進制粒子群停止迭代收斂的條件為:
|(xi,yi,zi)′-(xi,yi,zi)|≤ε,
ε越小,迭代次數越多[15-16],本文仿真取0.01。
算法過程為:
① 參數設置,確定植保無人機空間三維變量,并隨機初始化種群中各粒子的位置和速度;
② 評價各粒子的適應度函數,記錄局部最優個體和全局最優個體;
③ 根據式(1)更新粒子的速度和位置;
④ 通過Sigmoid函數對粒子速度和位置修正;
⑤ 計算跟蹤數據ε,若滿足條件則停止迭代,轉至步驟⑥,否則轉至步驟②;
⑥ 輸出跟蹤軌跡。
3 實驗仿真
在目標跟蹤的計算機仿真中,二進制粒子群算法的參數選取如下:粒子更新速率為vmax=1 200,c1=c2=2,w∈[0.4,0.9],粒子群的種群大小為50,總的迭代次數為300。植保無人機參數為:初始位置 (20 m,30 m) ,初始速率:5 m/s ,初始速度方向:2.45 rad,測量標準差:0.5 m ,采樣周期:0.5 s。不同算法跟蹤結果如圖1~圖6所示。
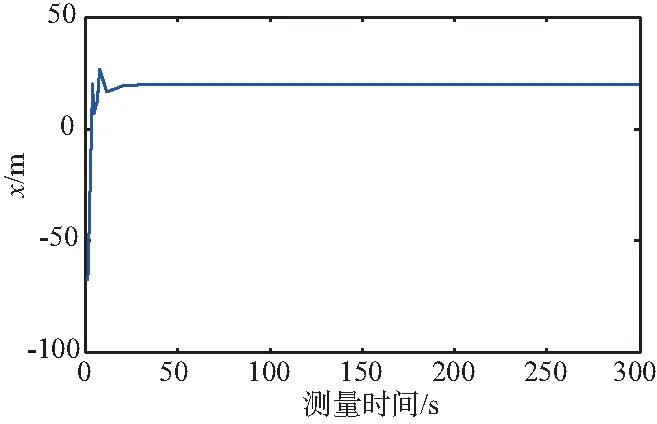
圖1 PSO算法x方向跟蹤結果
圖1~圖6分別給出了各個方向上的跟蹤值,可以看出,BPSO算法比PSO算法的波動較小,且趨于穩定時間較短。在x方向跟蹤測量對比顯示,圖2為本文BPSO算法x方向跟蹤測量誤差穩定在15 m,而圖1為PSO算法x方向跟蹤測量誤差穩定在20 m;在y方向跟蹤測量對比顯示,圖4為本文BPSO算法y方向跟蹤測量誤差穩定在15 m,而圖3為PSO算法y方向跟蹤測量誤差穩定在18 m;在z方向跟蹤測量對比顯示,圖6為本文BPSO算法z方向跟蹤測量誤差穩定在16 m,而圖5為PSO算法z方向跟蹤測量誤差穩定在18 m;因此BPSO算法跟蹤效果明顯較好。
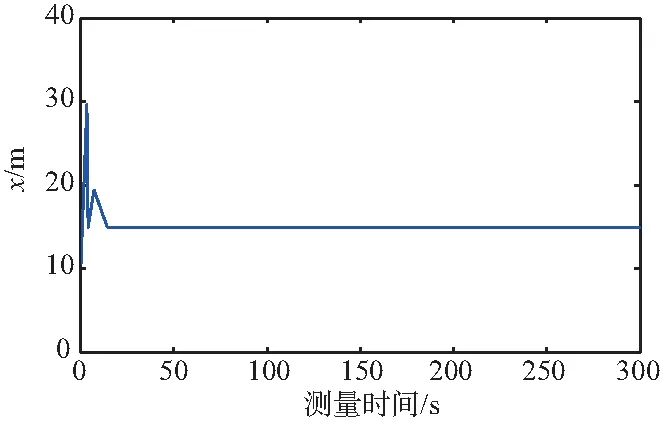
圖2 BPSO算法x方向跟蹤結果
圖3 PSO算法y方向跟蹤結果
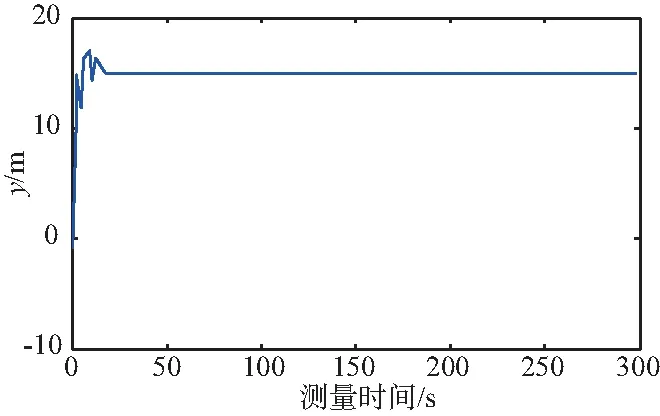
圖4 BPSO算法y方向跟蹤結果
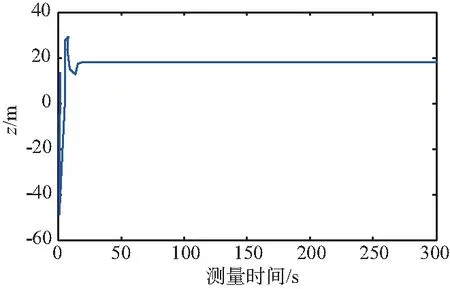
圖5 PSO算法z方向跟蹤結果
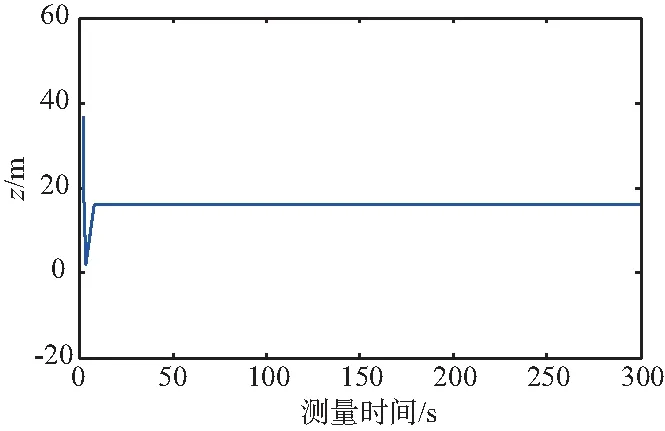
圖6 BPSO算法z方向跟蹤結果
為了評價跟蹤效果,選取虛警率作為指標,跟蹤虛警率如表1所示。

表1 跟蹤虛警率
由表1的跟蹤虛警率中可以看出,本文BPSO跟蹤虛警率最小,這樣在跟蹤過程中產生的誤跟蹤較少,這是因為二進制粒子群通過Sigmoid函數將粒子的位置和速度進行不斷的修正,使數據尋優找到真實解的概率較大。
4 結束語
本文提出了一種基于二進制粒子群算法的植保無人機跟蹤模型,通過Sigmoid函數優化的粒子群可以方便、準確跟蹤植保無人機。實驗仿真結果顯示,本文BPSO算法在x,y,z方向跟蹤誤差值小于PSO算法,因此該方法具有一定的優越性和可行性,為無人機應用在智能農業發展提供了一種新的思路。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
