四卷筒式電差動卸船機凸輪限位保護機械結構邏輯運算器分析
2020-09-29 06:54:50蔡有高萬吉祥李玉鋒
科學技術創新 2020年29期
關鍵詞:機械
蔡有高 萬吉祥 李 祥 李 寒 李玉鋒
(華能(福建)海港有限公司,福建 福州350602)
四卷筒橋式卸船機是世界上廣泛應用的散料卸船機械之一,技術趨于成熟、可靠,在實際作業過程中,受外界因素影響較小,維修工作量小。在船舶行業逐漸向大型化方向發展,在運輸能力上提出更高層次的要求。因此,相關人員利用行星差動結構傳動特點,制造了一種純機械的邏輯運算器,確保在任何運動狀態下,實現運動保護,合理化地運用電氣調速控制技術,提升卸船機操作性能。
1 關于差動形式卸船機分析
傳統卸船機上的小車運行、抓斗升降、抓斗開閉需要三套傳動系統,通過技術改造之后,轉變為四卷筒橋式抓斗方式,通過使用行星差動減速器、四只卷筒、起升開閉電機等,可有效實現對差動形式的控制,簡化結構、減輕重量。通過卸船機上的小車進行運動,衍生出更加新穎的四卷筒牽引方式。四卷筒機械形式差動卸船機的核心技術是行星差動減速器的運用,基于卸船機械船能力不斷提升的前提下,行星差動減速器制造難度加大。基于此背景下,電差動形式的卸船機誕生,在非行星減速箱驅動支持下,形成的由四臺電機組成的四個卷筒,運用電控方式,驅動每個電機帶動相對應的減速器進行的卷筒運動,其工作原理類似于機械差動形式運動。四卷筒機電差動卸船機上,小車通過獨立運動,對電機進行驅動,通過將差動減速箱上安裝凸輪限位裝置,實時進行檢測和保護,與小車運行互不干擾[1]。相關研究人員,通過參考機械差動卸船機起升、抓斗、開閉動作的保護,為實現小車獨立運動,安裝了凸輪限位保護裝置,加強對指令信號的保護,從而監測卸船機起升、開閉動作是否處于安全狀態下。
2 四卷筒差動小車牽引機構工作原理及電差動四卷筒驅動機構
2.1 工作原理
四卷筒差動小車牽引機構由四個卷筒組成,兩個為起升卷筒、兩個為開閉卷筒,通過將起升鋼絲繩與前開閉鋼絲繩繞出卷筒,經過塔架滑輪等裝置連接到抓斗;后起升鋼絲與后開閉鋼絲同樣從卷筒繞出,經過后大梁改向滑輪連接抓斗的開閉段,確保最終實現對小車的驅動。具體的結構(如圖1 所示),四卷筒電差動卸船機在具體運行過程中,利用小車和四卷筒實現抓斗的起升和開閉,整個運動過程簡單,鋼絲繩用量和滑輪數量少,在抓斗和鋼絲繩更換上更加便捷,一定程度上減輕了小車移動荷載。相關人員在具體設計四卷筒小車牽引機構過程中,需要科學計算電機功率。小車在運動過程中,涉及到阻力限制,包括摩擦阻力L11、風載荷L12、起升繩僵性以及滑輪的摩擦阻力L13、坡道載荷L14、加速載荷L15等,在具體的計算方式,以實例進行分析,比如一臺10×105kg/h 卸船機來說,已知的前提條件為小車運行質量(T)2000kg、額定的載荷(L)為9000kg、抓斗和起升質量(T)為8200kg、小車的運行速度(V)為200m/min,載荷加速時間(t1)為6s、機構效率(u)為0.95、電機過載因素(P0)為4[2]。因此,根據已知條件進行計算,可得出小車的摩擦阻力,根據風壓可計算出風載荷因數,進而確定小車最終的運行功率。
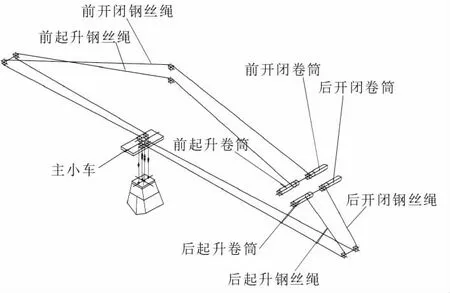
圖1 四卷筒差動小車牽引機構圖
2.2 電差動四卷筒驅動機構
基于電差動四卷筒驅動機構,性能優勢顯著,逐漸代替了傳統的差動減速器,為具體的項目運行,有效控制了成本,通常情況下,電差動卸船機的起升、開閉機構由電動機作為驅動,在減速器限位輸出軸位置安裝1:1 的分動箱,并安裝絕對值編碼器和凸輪限位,進而實現電氣系統對卷筒轉速和圈數信息的控制。
2.3 卸船差動減速器結構
當出入軸轉速確定后,再次輸出軸的轉數為自由度減速器,具體特征表現為箱體上存在三根軸,待輸入的軸轉速確定后,會出現兩個自由度減速器,稱之為差動減速器,可按照要求控制運動形式,實現運動分解和合成。差動減速器的主要構成為齒軸、齒輪、太陽輪、行星輪、箱體等,容易散熱和潤滑,在具體的工況中,易裝配、易拆卸,可有效提升設備的運行質量[3]。當小車在電機在運轉過程中,通過輸入小車的轉速,可有效帶動行星輪的運轉,對輸入軸進行固定,提升電差動卸船機穩定運行效果。
3 電差動卸船機凸輪限位保護機械結構邏輯運算器
3.1 差動減速器凸輪限位檢測裝置
電差動減速器電氣程序,實現對機械差動卸船機的起升、開閉機構控制,加強對卸船機上小車機械結構的保護。相關研究人員,在具體試驗過程中,加強對電差動卸船機凸輪限位的保護測試,將凸輪限位系統以海陸側卷輸出方式,作為系統的輸入值,通過差動行星減速器實現對機械邏輯的運算,最終實現凸輪限位與減速器輸出軸的連接,并在電差動卸船機凸輪限位保護過程中,有效控制運轉速度和運轉方向,更好監測和保護海陸側卷筒的起升保護。相關研究人員為提升電差動卸船機差動監測功能,積極設計和研發鏈輪差動減速器凸輪限位檢測裝置,并以鏈條形式,控制卷筒旋轉圈數和旋轉的方向,通過在差動減速器上配套安裝凸輪限位和絕對位置編碼器,可精確計算出圈數的變化,并實時將絕對編碼器采集到的信息數據傳遞給電氣控制系統,實現對設備硬件的保護。
3.2 行星差動傳動原理
相關研究人員研發的一種電差動卸船機為保護機械結構邏輯運算器,確保實現對限位系統輸入信號的保護,實時控制卸船機的抓斗起升、開閉動作的變量值。基于邏輯運算器本身是一種機械結構,通過在卷筒中輸入卷筒的不同運動方式,實現對凸輪限位系統的輸入。電差動卸船機在具體運行過程中,需要在行星減速器的控制下,實現對機械機構的保護。就行星差動傳動原理來看,行星傳動裝置是由一系列的齒輪構成的,在各個齒輪周轉過程中,存在兩種不同的運行方式,一是行星齒輪輪系,二是行星差動輪系。相關研究人員在實踐研究中發現,行星差動具備兩個獨立運動的主動構件,確保實現系統的正常運動。行星差動傳動是行星齒輪傳動的特殊形式,在具體運動和功率傳輸過程中,行星差動傳動需要按照一定的要求對輸入的功率和主動運動進行分解傳遞。在具體工況下,通過、行星差動傳動,可有效解決調速和驅動問題。
3.3 機械結構邏輯云計算器
相關研究人員,通過實踐分析發現,從一個基本構件輸入運動,行星差動輪系可分解成兩個構件運動和輸出的方式,基于此,相關研究人員設計和制造出具有差動功能的齒輪箱,確保更加靈活地控制卸船機的起升、開閉運動,充分發揮出機械結構邏輯運算器的功能。卸船機核心工作機構是起升、開閉和小型牽引機構,主要控制了抓斗的起升、開閉和小車運行狀態,常規的四卷筒橋式卸船機(如圖2 所示),小車牽引機構采用四卷筒結構形式實現差動功能的運用,具體(如圖3 所示),兩臺行星差動減速機,通過控制電氣系統,實現抓斗起升/開閉及小車運動,通過齒輪之間的聯動,更好高效、可靠地應用在實際的工作場景中。
3.4 電差動機構傳動方案

圖2 橋式卸船機
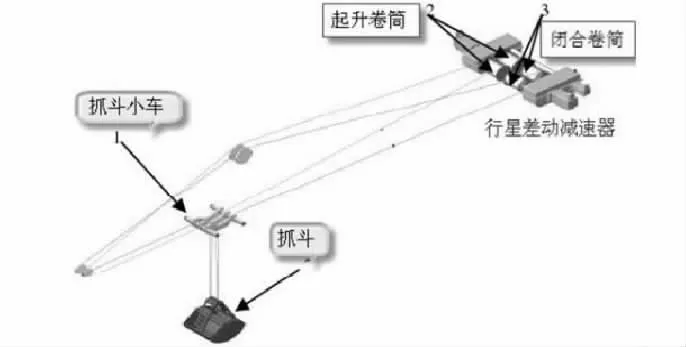
圖3 小車牽引差動機構纏繞
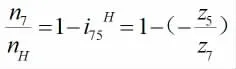
齒輪在傳動系統中,傳動效率高、結構緊湊、傳動比較大等優勢作用,在功率分流作用下,可減輕單個齒輪的受力,降低了齒輪件的嚙合力,在差動機構中,會在沒和減速箱中配備兩個功能包,進而實現減速功能,并在每個功能包中配備一個行星輪系,促進減速機和齒輪之間的嚙合,更好完成物料抓斗,當卸船機抓斗在起升、關閉時,通過、太陽輪完成內齒圈的制動;在小車運行過程中,通過齒圈輸入實現太陽輪的制動,在開閉機運行期間,小車電機不開啟,則小車不會運行,開啟電機,則小車開始運行,可將開閉電機轉速設定為n 開,前提條件為n開=n9,將開閉卷筒轉速設定為N開閉,已知條件為nH=N開閉, 轉速單位為r/min,將齒輪的齒數設定為Zi,通過運算則得到太陽輪7 與行星架H 的傳動比設定為:
4 結論
綜上所述,通過分析電差動減速器凸輪限位檢測裝置、行星差動傳動原理、機械結構邏輯云計算器、電差動機構傳動方案等方面,相關研究人員,設計、制造出可以應用于四卷筒機械形式的差動卸船機,為行星差動應用,提供了可靠的機械保障,為電差動形式的卸船機應用提供了技術支撐。因此,相關研究人員,需要進一步加強對四卷筒橋式電差動卸船機的研究和探討。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09