基于多腔軟體驅動器的柔性手指設計
2020-09-29 02:54:36張永梁
工程設計學報 2020年4期
關鍵詞:模型
魏 瓊,張永梁,游 穎,汪 泉
(湖北工業大學機械工程學院,湖北武漢430068)
隨著工業化的不斷發展,相關行業對機器人末端執行器的柔順性提出了更高的要求[1-3]。軟體機器人作為一種新興機器人,具有較好的柔順性,可代替傳統末端執行器,滿足不同的工作需求[4],其已廣泛應用于軍事、航空航天、核工業、醫療及食品等領域[5-7]。目前,國內外學者對軟體機器人進行了大量研究。例如:首爾科學技術研究院的Song等人研制了一種基于觸覺反饋的氣動執行器,其驅動力由靜電力產生的內部氣壓提供[8];首爾國立大學的Wang等人研制了一種基于SMA(shape memory alloys,形狀記憶金屬)材料的智能軟復合鉸鏈制動器[9];日本東芝公司研制了一種三自由度的人工肌肉驅動器——FMA(flexible micro actuator,柔性微小驅動器),該驅動器具有3個腔室,可根據氣壓來調節FMA的運動方向[10];德國Festo公司研制了具有自然運動形式的輕型機器人——Bionic Motion Robot(仿生運動機器人),其可以模擬象鼻與章魚觸須的運動方式[11];中南大學的韓奉林等人研制了一種變形可控和剛度可調的顆粒流驅動變剛度彎曲軟體驅動器[12];江南大學的孫沂琳等人設計了一種可上下彎曲的氣動軟體驅動器,并對其進行了有限元仿真分析[13];浙江工業大學的鮑官軍研制了一種新型氣動柔性驅動器,其既可以用作驅動器又可以直接用作機器人關節[14];天津大學的王華與北京航空航天大學的王興堅等人共同研制了一種軟體彎曲驅動器,利用氣壓驅動力的偏心作用實現驅動器的彎曲運動[15];上海交通大學的費燕瓊等人研制了一種多腔軟體行進機器人,利用前、后摩擦片的摩擦力的交替變化來驅動機器人周期性前進[16]。
目前,軟體機器人主要用作工業機器人的末端執行器,用于夾取表面柔軟或易碎的物品。相比于傳統末端執行器,軟體機器人的柔順性雖有所增強,但運動自由度還有所欠缺。
為解決上述問題,筆者設計了一種基于三自由度多腔軟體驅動器的柔性手指,其具有上下彎曲功能與左右側擺功能。首先,以模擬人手手指的運動方式為目標,對軟體驅動器的運動原理進行分析,為實現關節大變形彎曲功能以及手指側擺功能提供理論依據;其次,分析軟體驅動器的運動過程,建立驅動器偏轉角度與輸入氣壓的非線性模型,建立手指的空間位姿方程;最后,在Abaqus CAE軟件中對柔性手指進行仿真分析,得到偏轉角度與輸入氣壓的關系曲線,并通過單向軟體驅動的性能試驗來驗證模型的準確性。
1 柔性手指的結構設計
柔性手指由單向轉動軟體驅動器、二自由度轉動軟體驅動器、骨架和指尖等四部分組成,如圖1所示。其中,軟體驅動器部分由硅橡膠制成。硅橡膠是一種具有超彈性特性的材料,能夠實現超大變形,非常適用于制作關節。

圖1 柔性手指結構示意圖Fig.1 Structure diagram of flexible finger
1.1 柔性手指的運動原理
柔性手指的轉動由軟體驅動器完成。軟體驅動器是一種仿生驅動器,可模擬環節動物的運動過程。軟體驅動器為多腔結構,分為上、下腔體,當對其上腔體充氣時,上腔體氣壓升高而膨脹變形,下腔體氣壓不變,不發生變化,從而導致軟體驅動器發生偏轉,實現關節的轉動。充氣前后的軟體驅動器如圖2所示。

圖2 充氣前后的軟體驅動器Fig.2 Soft drive before and after inflation
1.2 單向轉動軟體驅動器的結構設計
單向轉動軟體驅動器可用于模擬人手指近指關節的彎曲功能,通過充氣實現上下彎曲。單向轉動軟體驅動器的結構如圖3所示,其上、下腔體各有5個腔室,其具體尺寸參數如表1所示。
1.3 二自由度轉動軟體驅動器的結構設計

圖3 單向轉動軟體驅動器的結構示意圖Fig.3 Structure diagram of single direction rotary soft driver
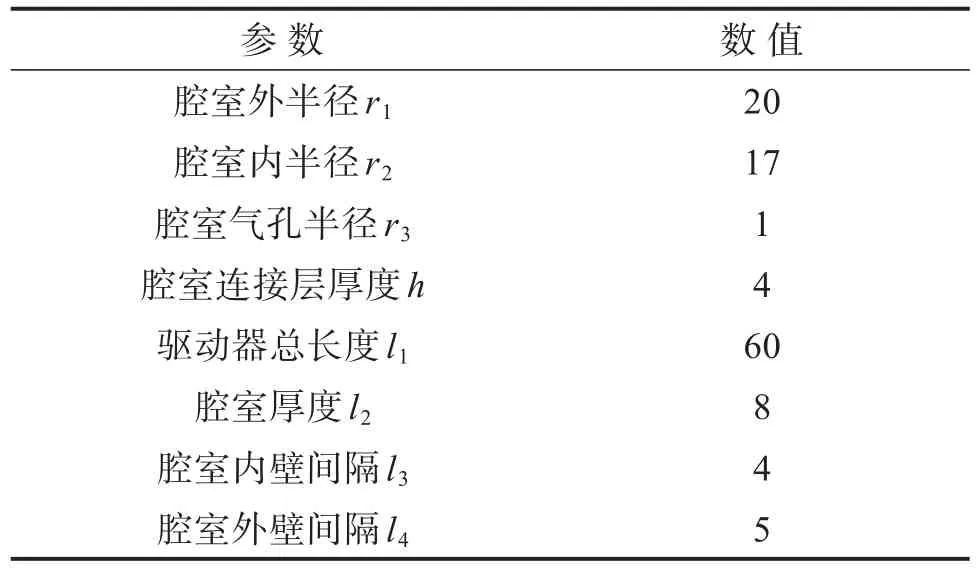
表1 單向轉動軟體驅動器的尺寸參數Table 1 Size parameters of single direction rotary soft driver 單位:mm
二自由度轉動軟體驅動器的結構如圖4所示,共分為三部分:單向轉動軟體驅動器、連接骨架和側擺軟體驅動器。側擺軟體驅動器與單向轉動軟體驅動器結構相似,為了實現小幅度擺動功能,其腔室數量縮減為2個。在柔性手指運動過程中,單向轉動軟體驅動器上下彎曲,側擺驅動器小幅度擺動,2個驅動器同步運動時即可模擬人手指近指關節的運動方式。二自由度轉動軟體驅動器的部分尺寸參數如表2所示,其中單向轉動軟體驅動器的尺寸參數已在表1中說明,不再贅述。
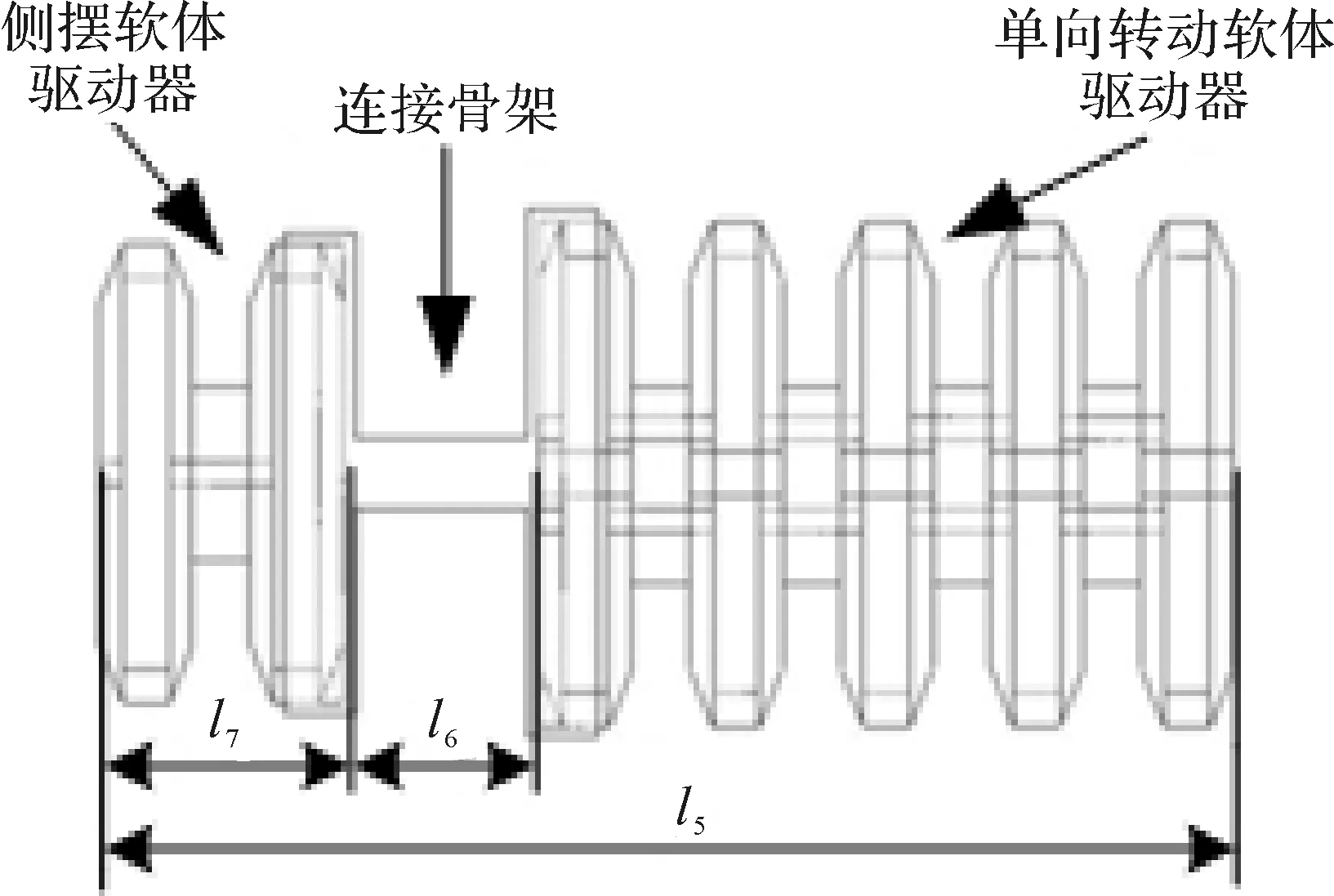
圖4 二自由度轉動軟體驅動器的結構示意圖Fig.4 Structure diagram of two degrees of freedom rotary soft driver
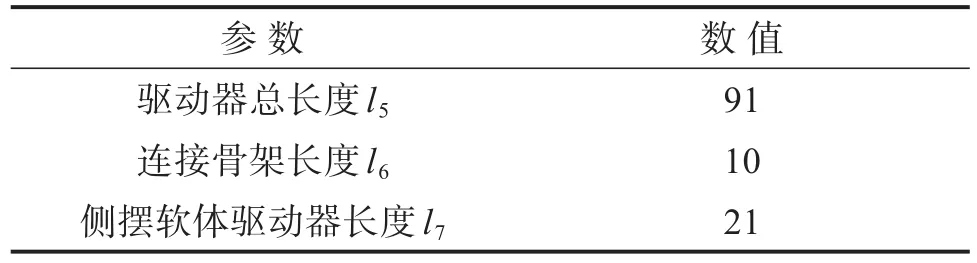
表2 二自由度轉動軟體驅動器的部分尺寸參數Table 2 Some size parameters of two degrees of freedom rotary software driver 單位:mm
2 柔性手指的力學模型
2.1 硅橡膠材料的本構關系
硅橡膠具有超彈性、不可壓縮等特性,屬于非線性材料。軟體驅動器由硅橡膠制成,其變形是一種非線性變化,且具有大變形特征。Yeoh模型是一種適用于模擬大變形行為的非線性模型[17-18],本文選取二階Yeoh模型作為軟體驅動器的本構模型。
假設硅橡膠具有各向同性和不可壓縮性,基于應力與應變的關系構建硅橡膠材料的本構關系。二階Yeoh模型應變能密度函數如下:

式中:W——材料應變能;
I1——變形張量不變量;
C10、C20——二階Yeoh模型參數。
根據Piola-Kirchhoff應力與Cauchy-Green應變的關系[13]可得出發生形變時橡膠內部主應力為:

式中:σ——材料內部主應力;
λ1——空間中第1方向上的主伸長比;
λ2——空間中第2方向上的主伸長比。
聯立式(1)和式(2),得到主應力與主伸長比的關系為:

2.2 軟體驅動器的力學模型
2.2.1 單向轉動軟體驅動器的力學模型
單向轉動軟體驅動器在轉動過程中受到氣壓的作用,產生變形。氣壓在軟體驅動器內壁上產生的力矩(氣壓力矩)與驅軟體動器自身變形產生的內應力產生的力矩(應力力矩)達到平衡狀態。氣壓力矩和應力力矩的表達式分別為:
式中:Mp——氣壓產生的力矩,N?mm;
p——輸入氣壓,MPa;
r——力的作用半徑,mm;
θ——單向轉動軟體驅動器單個腔室偏轉角度,rad;
MW——單向轉動軟體驅動器內應力產生的力矩,N?mm。
y——驅動器腔室連接層內部應力力矩的力臂,mm。
由虛功原理可知,物體所受的全部外力將轉化為其內部應力,則有:

當氣壓作用在單向轉動軟體驅動器內壁上時,內壁的變形導致整個內壁面的力矩分布不均,因此設置一個系數k來表征變化的氣壓值。

式中:Mp'——氣壓產生的真實力矩,N?mm。
將式(4)代入式(7)可得:
伸長比λ1為軟體驅動器工作長度與原總長度之比:

將式(10)代入式(9),可得到輸入氣壓與驅動器單個腔室偏轉角度的關系:
2.2.2 側擺軟體驅動器的力學模型
二自由度轉動軟體驅動器中,五腔室單向轉動軟體驅動器和側擺軟體驅動器的工作平面相互垂直。五腔室單向轉動軟體驅動器用于實現上下轉動功能,實現手指基本功能;側擺軟體驅動器用于實現側擺功能,增強手指的靈活性。
根據式(11),推導出側擺軟體驅動器的力學模型為:

2.3 柔性手指的位姿方程
在實際應用中,通常采用D-H參數來表示工業機器人各個關節的位姿,但由于本文所采用的軟體驅動器的長度可變,不能直接剩用傳統的D-H參數法來建立柔性手指的位姿方程。因此,須根據軟體驅動器的形狀變化規律,建立能表征柔性手指運動特性的位姿方程。
通過分析軟體驅動器的運動原理可以發現,在發生角度偏轉時,由于氣壓的作用,軟體驅動器的內腔壁向外擴張,底板伸長。單個驅動器伸長量與偏轉角度的關系為:

式中:l'——單個驅動器伸長量,mm;
δ——單個驅動器偏轉角度,rad。
設點S0、S1、…、S23為柔性手指的節點,在一定彎曲角度下,柔性手指的空間狀態如圖5所示,其中:以S0節點為坐標原點,以二自由度轉動軟體驅動器的初始彎曲方向為Z軸正方向,以側擺軟體驅動器的初始運動方向為X軸正方向,以指尖初始方向為Y軸正方向。
圖5 柔性手指的空間狀態Fig.5 Space state of flexible finger
為建立柔性手指的位姿方程,作如下假設:
1)兩腔室間連接部位的長度不變;
2)每個腔室內的氣壓相等,且每個腔室的偏轉角度相同。
設點S0、S1、…、S3為側擺軟體驅動器的節點,則其坐標為:
式中:rw——連接層彎曲后其表面圓弧的半徑,mm;
α——側擺軟體驅動器單個腔室的偏轉角度,rad。
二自由度轉動軟體驅動器中的單向轉動軟體驅動器與側擺軟體驅動器之間由骨架連接,S4、S5、…、S13為單向轉動軟體驅動器的節點,節點位置如圖6所示。

圖6 二自由度轉動軟體驅動器中單向轉動軟體驅動器的節點位置示意Fig.6 Node position schematic of single direction rotary soft driver of two degrees of freedom rotary soft driver
由圖6可知,單向轉動軟體驅動器起始節點S4的坐標可表示為:

節點Si(i=4,5,…,13)的坐標可表示為:

模擬柔性手指遠指關節功能的單向轉動軟體驅動器通過3D打印的骨架與二自由度轉動軟體驅動器相連接。S14、S15、…、S23為單向轉動軟體驅動器的內部節點,其起始節點S14的坐標為:
式中:l骨——連接單向轉動軟體驅動器與二自由度轉動軟體驅動器的骨架的長度,mm。
模擬柔性手指遠指關節功能的單向轉動軟體驅動器上的節點Si(i=14,15,…,23)的坐標可表示為:
式中:β——遠指關節的單向轉動軟體驅動器單個腔室的偏轉角度,rad。
由式(21)可知:柔性手指位姿方程只與側擺軟體驅動器單個腔室的偏轉角度α、二自由度轉動軟體驅動器中單向轉動軟體驅動器單個腔室偏轉角度θ、遠指關節的單向轉動驅動器單個腔室的偏轉角度β有關。根據這3個角度就可以得到柔性手指所有節點的坐標,可為柔性手指的運動軌跡規劃奠定良好的基礎。
3 單向轉動軟體驅動器有限元仿真分析
為驗證柔性手指力學模型的正確性,通過Abaqus CAE軟件對柔性手指進行力學仿真分析。在Croe軟件中構建單向轉動軟體驅動器、二自由度轉動軟體驅動器、骨架和指尖的模型并進行裝配,然后將柔性手指三維裝配模型導入Abaqus CAE軟件進行仿真分析,選擇Yeoh模型作為軟體驅動器的本構模型,其具體參數如表3所示,邊界條件設置為進氣口端完全固定,負載設置為20 kPa氣壓。通過仿真分析可知,單向轉動軟體驅動器的彎曲角度可達102.3°,柔性手指整體的彎曲角度可達204.6°,其工作狀態如圖7所示。

表3 Yeoh模型的參數Table 3 Parameters of Yeoh model
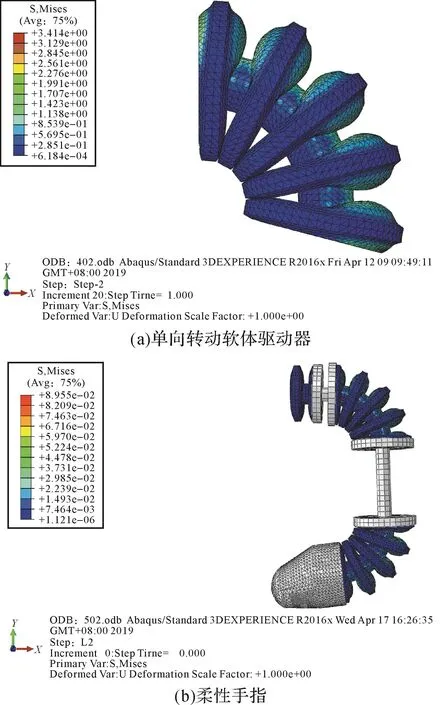
圖7 單向轉動軟體驅動器和柔性手指的工作狀態Fig.7 Working state of single direction rotary soft driver and flexible finger
將有限元仿真與力學模型計算得到偏轉角度—輸入氣壓曲線進行對比,結果如圖8所示。其中,為便于分析,采用偏轉角度的單位為(°),下同。
從圖8中可以看出:有限元仿真與力學模型計算得到的結果存在偏差,仿真得到的擬合曲線的斜率隨輸入氣壓的增大而減小,力學模型計算得到的擬合理論曲線的斜率基本不變;當氣壓大于8 kPa時,仿真曲線的斜率減小得十分明顯,與理論曲線有較大的偏離。原因為:在單向轉動軟體驅動器充氣過程中,其腔壁的變形量隨氣壓的升高而增大,導致其內應力隨之增大,相同的變形量需要更大的驅動力,因此仿真曲線斜率逐漸下降;當氣壓超過8 kPa后,單向轉動軟體驅動器自身發生接觸,產生阻力,從而導致仿真曲線斜率明顯減小。

圖8 有限元仿真與力學模型計算得到的偏轉角度—輸入氣壓曲線的對比Fig.8 Comparison of the deflection angle-input air pressure curve obtained by finite element simulation and mechanical model calculation
為了表征氣壓力矩的變化,在第2節中設置了一個系數k,該系數為通過力學模型算得的氣壓力矩的增益。通過對比有限元仿真與力學模型計算結果可知,k與輸入氣壓的關系式為:

將有限元仿真與k修正后的力學模型計算得到偏轉角度—輸入氣壓曲線進行對比,結果如圖9所示。
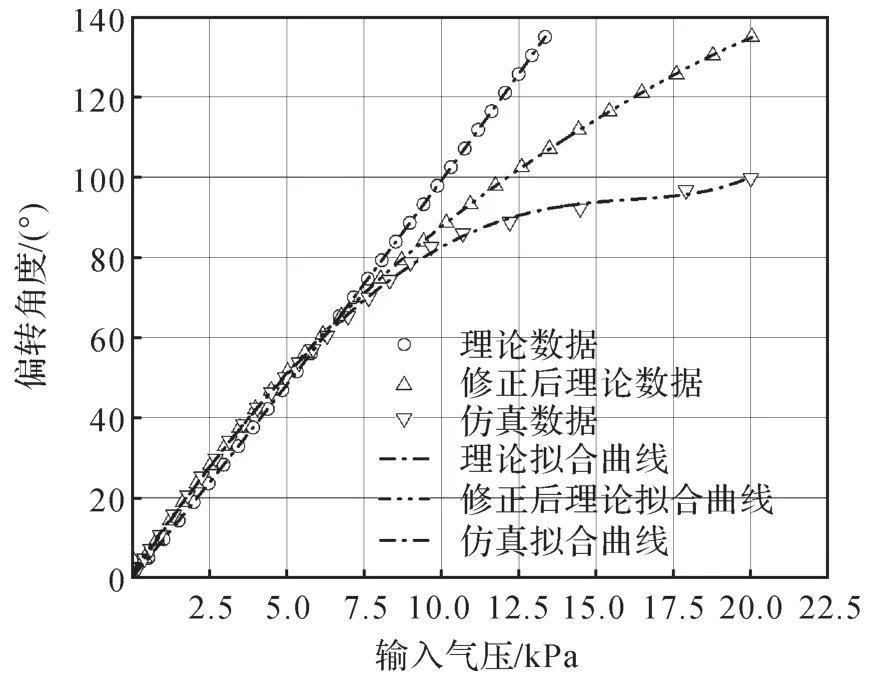
圖9 有限元仿真與k修正后的力學模型計算得到偏轉角度—輸入氣壓曲線的對比Fig.9 Comparison of the deflection angle-input air pressure curve obtained by finite element simulation and mechanical model calculation modified by k
從圖9中可以看出:k修正后,理論曲線更加接近仿真曲線;而當氣壓大于8 kPa后,仿真擬合依舊偏離了理論曲線,這是由于驅動器自身發生接觸,導致曲線出現偏離。可以將單向轉動軟體驅動器的運動狀態分為2個階段:第1階段,偏轉角度為0°~80°,軟體驅動器具有較好的線性度,其運動狀態如圖10(a)所示;第2階段,偏轉角度為80°~102.3°,由于結構限制,軟體驅動器底部會發生接觸,其運動狀態如圖10(b)所示。
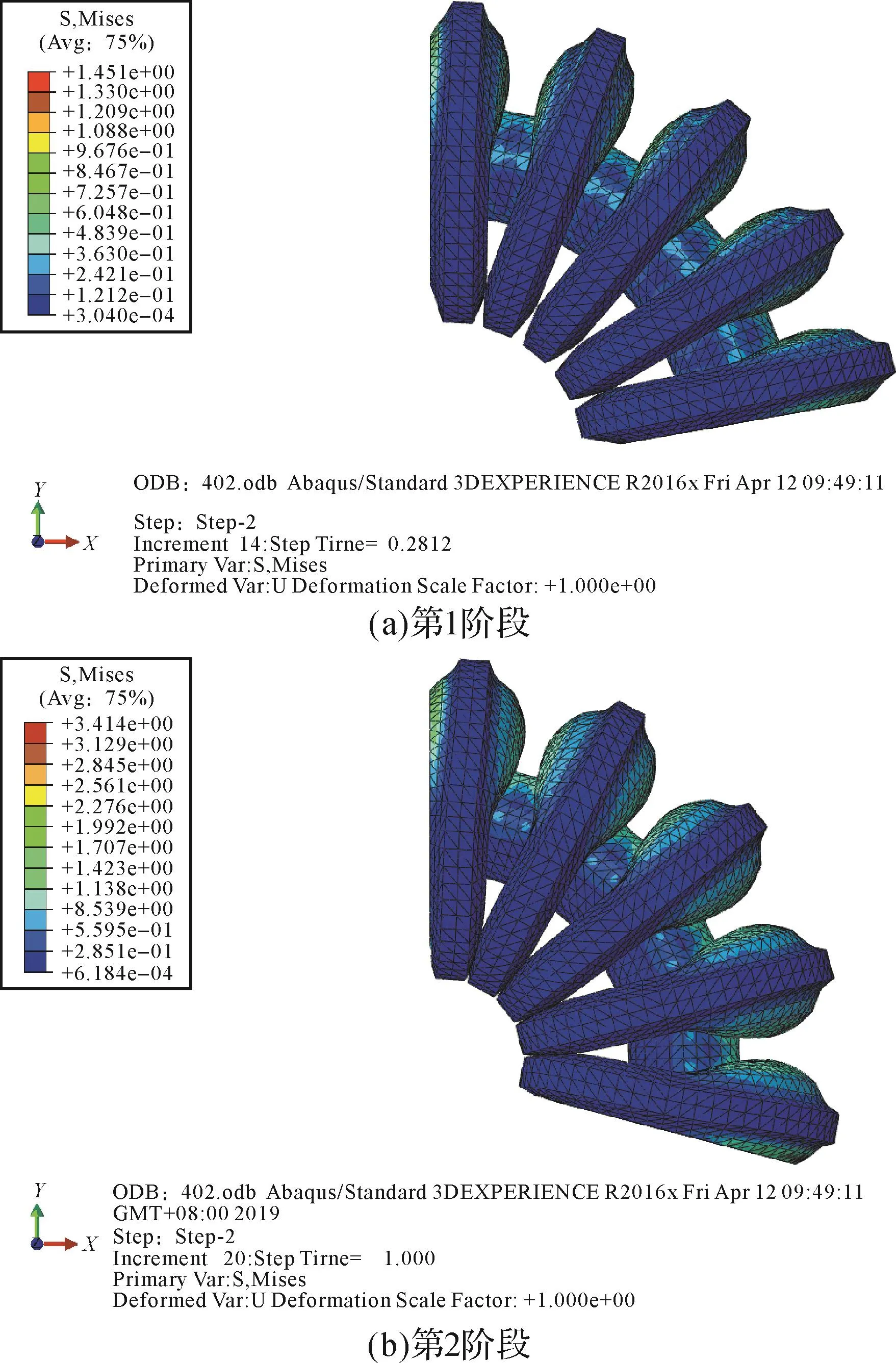
圖10 單向轉動軟體驅動器工作狀態Fig.10 Working state of single direction rotary soft driver
通過仿真發現,當偏轉角度為0°~80°時,單向轉動軟體驅動器的偏轉角度隨輸入氣壓的變化關系基本符合理論計算結果;當偏轉角度超過80°后,由于單向轉動軟體驅動器自身發生接觸,產生了阻力,導致仿真結果與力學模型計算結果產生了偏差。由于單向轉動軟體驅動器的工作范圍不超過80°,由此可知:在工作行程范圍內,單向轉動軟體驅動器具有較好的線性度。
4 試驗驗證
為研究單向轉動軟體驅動器實際力學特性與理論計算、仿真分析結果的差異,進行了單向轉動軟體驅動器力學特性試驗。以單向轉動軟體驅動器為試驗對象,通過改變輸入氣壓的大小,測量該軟體驅動器的偏轉角度。試驗一共設置20個采樣點,輸入氣壓的范圍為0~20 kPa,采樣間隔為1 kPa。當輸入氣壓為0,5,10,15,20 kPa時,單向轉動軟體驅動器的狀態如圖11所示,其偏轉角度—輸入氣壓曲線如圖12所示。
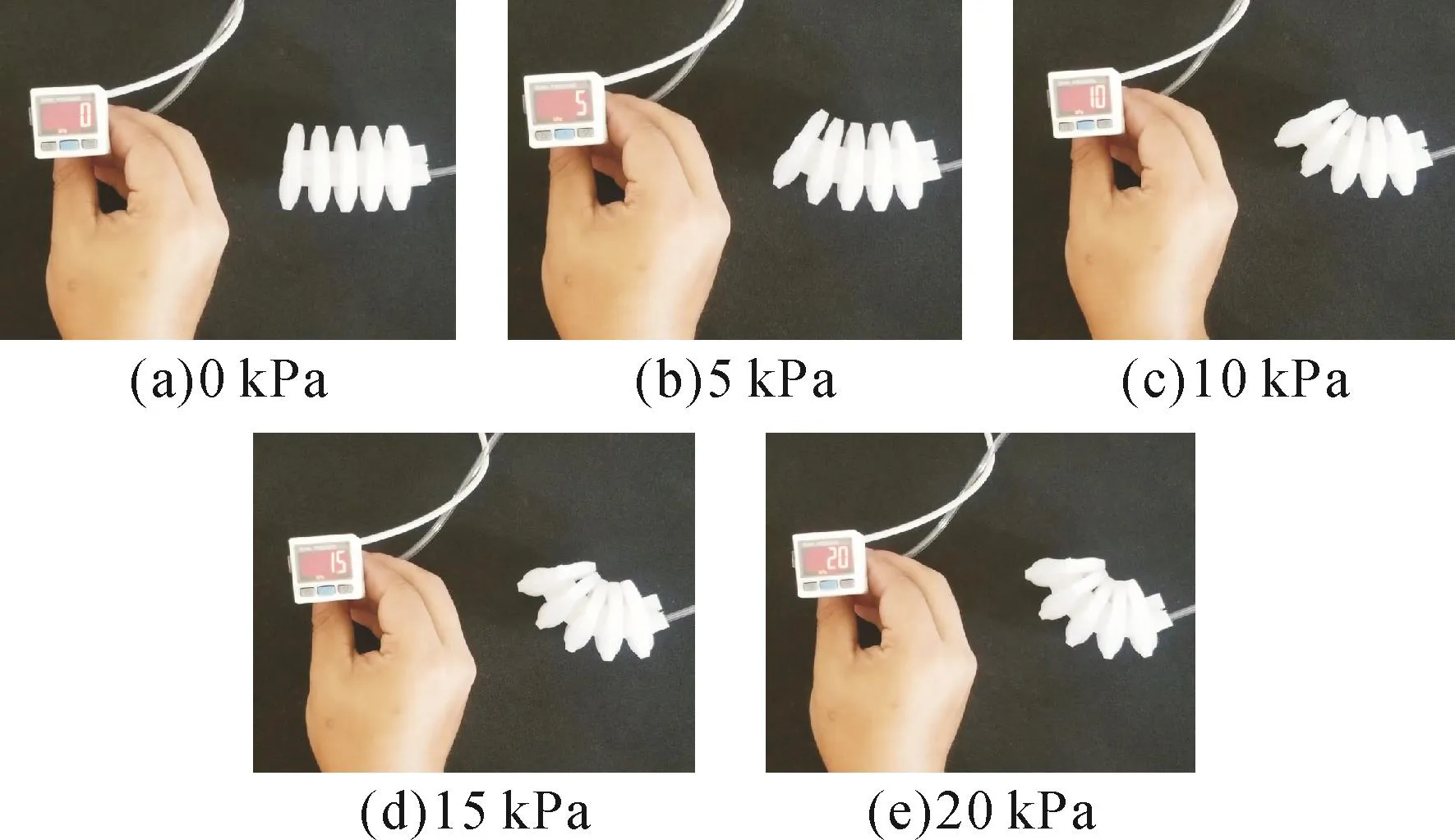
圖11 不同輸入氣壓下單向轉動軟體驅動器的狀態Fig.11 State of single direction rotary soft driver under different input air pressures

圖12 單向轉動軟體驅動器偏轉角度—輸入氣壓曲線的對比Fig.12 Comparison of the deflection angle-input air pressure curve of single direction rotary soft driver
從圖12可以看出,試驗數據與力學模型計算結果之間存在誤差,這是因為:壓力傳感器受到噪聲的干擾,影響了數據的采集;在制作軟體驅動器的過程中,硅橡膠中的氣泡無法完全去除,使得材料分布不均勻,從而導致材料變形產生的應力也分布不均勻。從整體上看,在偏轉角度為0°~80°時,單向轉動軟體驅動器理論計算與實際測得的偏轉角度—輸入氣壓曲線的變化趨勢基本一致,這說明所建立的力學模型基本準確。此外,由試驗結果可知,單向轉動軟體驅動器的偏轉角度在輸入氣壓為10 kPa時達到80°,可以實現柔性手指關節的彎曲功能,線性度好且控制容易,表明該軟體驅動器是一種比較適合的靈巧手關節驅動器。
5 結 論
1)基于硅橡膠的超彈性特征,設計了由二自由度轉動軟體驅動器和單向轉動軟體驅動器等組合而成的具有3個自由度的柔性手指,初步實現了人手指的彎曲功能與側擺功能。
2)建立了三自由度柔性手指輸入氣壓與偏轉角度的力學模型,建立了柔性手指的位姿方程,并且通過Abaqus CAE軟件驗證了所建立的柔性手指力學模型的準確性,為柔性手指的實際應用提供了理論依據。
3)通過Abaqus CAE軟件仿真分析得到單向轉動軟體驅動器的最大工作角度為80°,符合人類手指日常運動范圍,這對仿生型軟體機器人的設計提供了參考。
4)通過試驗驗證了單向轉動軟體驅動器力學模型的準確性,得到了該軟體驅動器的建議工作范圍,驗證了驅動器偏轉角度與輸入氣壓的關系。
5)經過研究發現,柔性手指還存在一定缺陷,如在未充氣狀態下,柔性手指因受到自身重力的作用而產生下垂。在后續的研究中,將考慮克服自重影響,對柔性手指的材料與結構進行優化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19