新安江水電站三維逆向建模的研究與應用
2020-10-09 06:43:14傅劍文朱克剛
水電站機電技術 2020年9期
傅劍文,朱克剛,胡 軍
(國網新源水電有限公司新安江水力發電廠,浙江 杭州311608)
1 引言
隨著能源互聯網建設的發展,能源互聯網數字化和智能化建設也越來越緊迫,水電站作為能源互聯網組成部分,其數字化和智能化建設也隨著技術的發展逐步推進。隨著VR和AR等可視化技術的發展,三維數字化模型已經成為水電站數字化建設的重要載體,如何高效地建立水電站的三維數字化模型很關鍵,尤其是老水電站,建設時的技術條件并未實現數字化建設,并且水電站經過多年的運行改造,設備和管路布置變化較大,圖紙資料也有部分缺失,因此要根據圖紙資料建立電站完整的三維數字化模型難度較大。三維激光掃描技術是最近幾年興起的一項技術,該技術可以迅速和準確地采集地面物體的表面數據,不跟地面物體接觸就能構建三維模型,該技術迅速成為采集空間數據的核心技術手段之一。三維激光掃描技術在變電站數字化設計[1]、古建筑保護[2]、數字城市建設[3]和景觀建模[4]等方面有廣泛的應用,因此三維激光掃描技術建模可作為老水電廠三維數字化建模的一種有效手段。本文嘗試采用三維激光掃描技術對新安江水電站主廠房三維數字化進行逆向建模。
2 三維激光掃描建模步驟
三維激光掃描建模的主要工作步驟如圖1,主要包括:①數據采集,通過三維激光掃描系統實地獲取目標實體的點云數據、紋理信息;②數據處理,包括多站點數據配準、拼接、去噪、重采樣等處理;③三維建模,根據不同的點云特征,建立三維空間數據模型;④紋理映射,紋理信息映射到模型上,形成模型的真實紋理[5]。
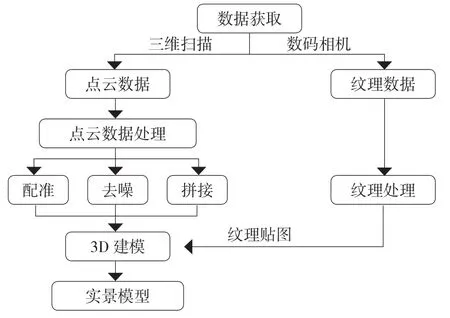
圖1 三維激光掃描建模流程
3 主廠房三維激光掃描及三維逆向建模
3.1 掃描范圍
新安江水電站總裝機容量662.5MW,共9臺混流式機組。主廠房總長度219m,寬度21m。本次主要對主廠房發電機層及水輪機層進行激光掃描,采集主廠房發電機層和水輪機層的結構及設備數據。其中發電機層主要設備包含發電機風罩、控制盤柜、橋式起重機、調速器壓力油罐、回油箱、油泵及閥門管路等,水輪機層主要設備包含通風系統風管、濾水器、油氣水閥門、油氣水管路系統、電纜橋架等。
3.2 設備選擇及站點設置
三維激光掃描建模效果的好壞跟掃描數據的采集質量有直接關系,采用Riegl VZ1000掃描儀作為數據采集設備。奧地利Riegl VZ1000高精度三維激光掃描儀具有數據采集精度高的特點,單次測量精度達6mm(100m處),掃描速度為30萬點/s,數據采集精度高,掃描速度快。

圖2 Riegl VZ1000高精度三維激光掃描儀
影響三維建模精度的另一個因素就是數據采集的完整性,為了能夠全面地、完整地獲取點云數據,并且得到精確的點云數據,掃描站布設遵循以下幾個原則:
(1)掃描站點需要盡量避開遮擋物。
(2)相鄰站點間距不能相隔甚遠,需要保留20%~30%的重疊度。
(3)站點間距設置不宜過大,研究顯示站點設置超過20m后,點云拼接精度就會降低[6]。因此,根據以上原則,本項目相鄰掃描站點間距不超過20m,共設置掃描站點75站,其中發電機層35站,水輪機層40站。
3.3 數據處理
現場獲取的各站離散的點云數據經過配準拼接后轉換成統一坐標系下的連續的構筑物或設備點云輪廓。本文將點云數據統一轉換成WGS84坐標系。張慶圓[7]認為點云拼接方法主要為標靶拼接、點云直接拼接以及控制點拼接3種方法。經過研究對比分析,因主廠房掃描數據具有較為明顯的特征點,所以本文利用點云直接拼接,通過尋找重疊區域的同名點進行點云拼接。點云數據在三維掃描儀自帶軟件RiScanPro中進行數據處理與拼接,為提高拼接的效率與精度,拼接設置見圖3,其中最近點搜索半徑為0.5m,最近點最大傾斜角5°,第一次最小微調距離為0.1m,第二次最小微調距離0.05m,拼接精度為0.0086m。點云拼接模型的精度檢查通過全站儀測量特征點和拼接后的坐標點進行對比,誤差滿足要求即可,如不滿足需要手動或者自動重新設置拼接,直至滿足要求。
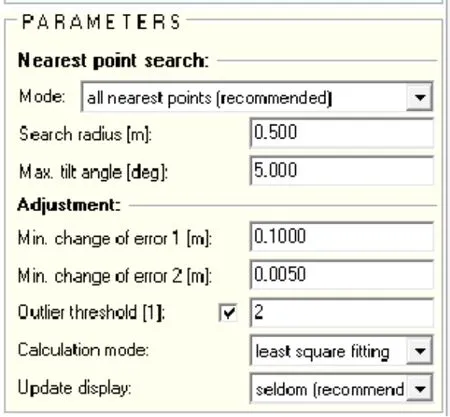
圖3 點云拼接參數設置
由于在現場采集數據過程中,廠房內有機組正在發電,振動較大,同時水電站環境比較復雜,掃描過程中有比較多的噪聲點,因此先進行手動刪除,然后再導入到RiScanPro軟件進一步處理去噪,形成光滑的點云數據,提高后期建模的精度。
拼接完成形成的是整個掃描范圍的點云模型(圖4),其數據量比較大,為了提高后期在三維建模軟件中建模的效率和流暢性,需將點云數據按照發電機層和水輪機層分別導出,導出數據格式為.las。
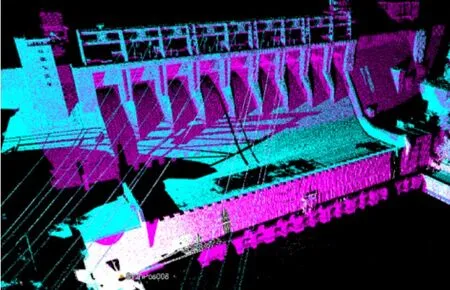
圖4 廠房點云輪廓
3.4 三維逆向建模
常用的點云建模軟件有Geomagic、Polyworks、Imageware、Autocad、3Dmax等,而 3Dmax更適用于較規則物體建模,2017及以后版本的3Dmax中所帶插件Autodesk Recap能識別大部分點云格式,這也為3Dmax建模提供了良好條件[8]。因此選用3Dmax作為建模軟件,將分層導出的發電機層和水輪機層點云數據分別導入到3Dmax,根據點云數據可以生成構筑物、管路和設備的外輪廓三角面模型。但由于構筑物外觀結構復雜,建模時要進行一定取舍和綜合,盡管模型相對點云精度會有一定損失,但根據點云上提取的模型特征點仍可以將模型精度控制達到1cm。
設備精細化模型的創建時,外圍輪廓是根據三維激光掃描點云構建三角網進而生成幾何模型,能夠精確反映設備的結構和外形。管線模型創建是根據中心線和截面尺寸由程序生成模型,管線體的中心線高根據底高或頂高和管徑的算術關系求得(忽略管壁厚度)。
采用三維激光掃描技術結合3Dmax形成的發電機層(圖5)和水輪機層(圖6)的輪廓模型,在外形和定位方面能夠跟現場情況完全一致,為了反映現場實景還需要進一步對輪廓模型進行紋理貼圖。

圖5 發電機層模型(未貼圖)
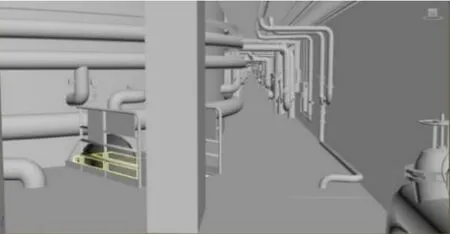
圖6 水輪機層模型(未貼圖)
3.5 紋理貼圖
紋理圖片是通過數碼相機在現場采集的,紋理數據根據位置和區域進行分類整理,采用專業的圖像處理軟件Photoshop進行裁剪處理。在貼圖前,需要先調整好攝像機鏡頭的角度和位置,并且劃分好貼圖范圍及需要注意的細節,如對濾水器進行貼圖,需要將攝像機鏡頭角度調整成為濾水器軸測視圖,利于觀察和貼圖,同時貼圖時也要考慮遠處和暗部的細節問題。利用3Dmax的【材質編輯器】功能,可以很方便的對結構和設備等進行貼圖,在彈出材質編輯器對話框中選擇經過Photoshop處理的設備及環境紋理圖片,獲取設備及環境紋理,對設備及環境進行貼圖,最大程度的還原現場。貼圖后的發電機層及水輪機層模型見圖7~8。

圖7 發電機層模型(紋理貼圖)

圖8 水輪機層(紋理貼圖)
4 結語
三維激光掃描是比較成熟的技術,在逆向建模中具有高效和精確的特點,本文采用三維激光掃描技術和3Dmax建模軟件,建立新安江水電站主廠房發電機層和水輪機層的數字化模型,相對傳統建模方法,該逆向建模的方法高效并且精確,通過紋理貼圖可以完全還原新安江水電站主廠房實景。然而,該方法雖然比傳統建模方法要高效和精確,但是在數據處理和紋理貼圖的環節還需要依靠實施人員的經驗才能更好地提高建模效率和建模精度。盡管如此,該方法仍然可以為老水電站建立三維數字化模型提供一種高效的逆向建模手段并進行推廣。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
故事作文·高年級(2021年12期)2021-12-21 02:32:35
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
大電機技術(2017年3期)2017-06-05 09:36:02
光學精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
核科學與工程(2015年4期)2015-09-26 11:59:03
電力工程技術(2014年1期)2014-03-20 14:19:06
