高速電動(dòng)汽車動(dòng)力系統(tǒng)建模與車身優(yōu)化
2020-10-09 10:47:26周凱任浩金寧治劉宇博艾民
電機(jī)與控制學(xué)報(bào) 2020年9期
周凱 任浩 金寧治 劉宇博 艾民
摘 要:針對(duì)世界最快電動(dòng)汽車展開(kāi)研究。建立車輛系統(tǒng)動(dòng)力學(xué)模型、傳動(dòng)系統(tǒng)模型、制動(dòng)系統(tǒng)模型,對(duì)能量存儲(chǔ)、電能轉(zhuǎn)換、機(jī)電能量轉(zhuǎn)換等方面進(jìn)行計(jì)算,使高速電動(dòng)汽車在直線加速賽中能夠獲得超過(guò)640 km/h的時(shí)速。動(dòng)力系統(tǒng)臺(tái)架實(shí)驗(yàn)是保證整車動(dòng)力性能優(yōu)劣的決定因素,將仿真模型與實(shí)驗(yàn)臺(tái)架相結(jié)合構(gòu)建半實(shí)物仿真實(shí)驗(yàn)平臺(tái),可實(shí)現(xiàn)對(duì)整車動(dòng)力性能的全面模擬。在對(duì)車身結(jié)構(gòu)的優(yōu)化過(guò)程中,將駕駛員視野作為首要考慮的因素,通過(guò)優(yōu)化擋風(fēng)玻璃傾斜角、護(hù)舷高度,增大駕駛員視野。車尾結(jié)構(gòu)優(yōu)化可降低壓差阻力,進(jìn)一步提升車輛行駛安全性能。
關(guān)鍵詞:高速電動(dòng)汽車;動(dòng)力系統(tǒng)建模;車輛動(dòng)力學(xué);風(fēng)阻損耗;車身優(yōu)化;半實(shí)物仿真
DOI:10.15938/j.emc.2020.09.014
中圖分類號(hào):TM 921
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1007-449X(2020)09-0126-08
Electrical powertrain modelling and bodywork optimization of high-speed electric vehicle
ZHOU Kai, REN Hao, JIN Ning-zhi, LIU Yu-bo, AI Min
(Ministry of Education Engineering Research Center of Automotive Electronics Drive Control and System Integration,Harbin University of Science and Technology, Harbin 150080, China)
Abstract:The worlds fastest electric vehicle was researched.The vehicle dynamics model, driveline model, braking system model was established and the energy storage, electrical energy conversion, electromechanical energy conversion was calculated which make the high-speed electric vehicle achieves more than 640 km/h in straight-line acceleration races.The bench test is the decisive factor to ensure the performance of the vehicle.The simulation model and the test bench are combined as semi-physical simulation test platform which can realize the power performance of the whole vehicle.In the process of optimizing the body structure, the drivers field of view was taken as the primary consideration. It is increased by optimizing the angle of windshield inclination and fender height.The optimization of the rear structure reduces the differential pressure resistance and further improve the safety performance.
Keywords:high-speed electric vehicle; powertrain modelling; vehicle dynamic; wind resistance loss; bodywork optimization; semi-physical simulation
0 引 言
美國(guó)猶他州邦納維爾鹽沼自汽車誕生之日起就成為了汽車追求極速的最優(yōu)地點(diǎn),獨(dú)特的地理結(jié)構(gòu)使其130 km2的地表都被鹽層覆蓋,平整而開(kāi)闊的地表使汽車在速度測(cè)試中完全不需要考慮碰撞、顛簸等外界因素的影響。由于邦納維爾鹽沼的獨(dú)特地理結(jié)構(gòu),國(guó)際汽車聯(lián)合會(huì)成立了專門的汽車速度賽事,接受來(lái)自世界各地賽車團(tuán)隊(duì)的參賽申請(qǐng)[1]。
賽事規(guī)則要求參賽車輛必須在固定長(zhǎng)度的賽道內(nèi)往返各測(cè)試一次,在固定的測(cè)試點(diǎn)(9.6 km)獲取賽車的實(shí)時(shí)車速,兩次測(cè)試結(jié)果的平均值為測(cè)試的最終結(jié)果,測(cè)試時(shí)間嚴(yán)格限制在一小時(shí)之內(nèi)[2]。
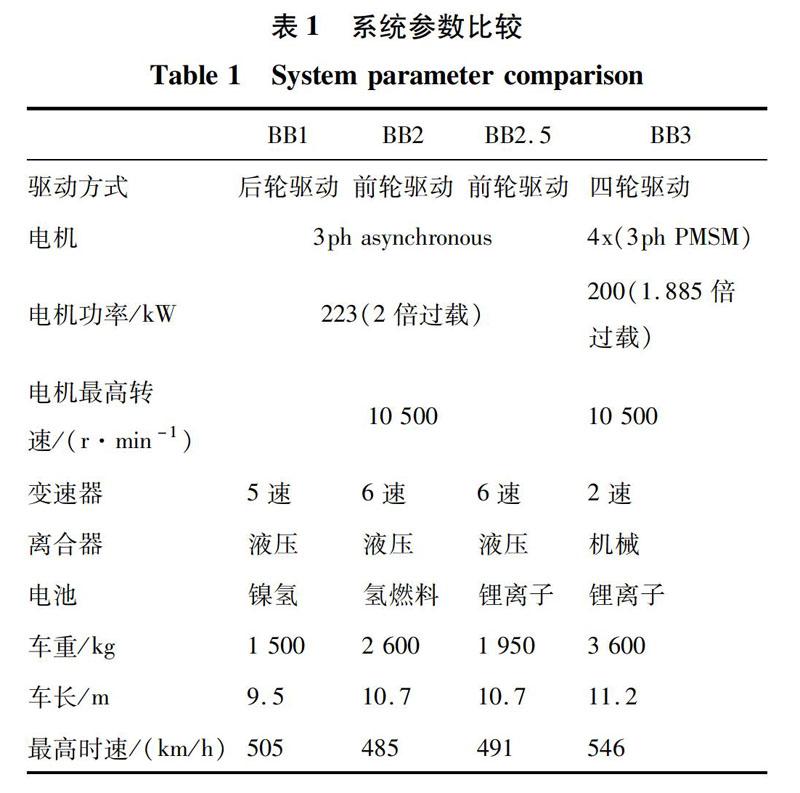
在過(guò)去的十幾年里,來(lái)自美國(guó)俄亥俄州立大學(xué)的七葉樹(shù)子彈(Buckeye Bullet)賽車團(tuán)隊(duì)加入到了這項(xiàng)賽事中。該團(tuán)隊(duì)所設(shè)計(jì)的賽車為純電動(dòng)汽車,第1代賽車(BB1)采用鎳氫電池作為儲(chǔ)能單元,后輪驅(qū)動(dòng)設(shè)計(jì),在2004年的比賽中獲得了505 km/h的最高時(shí)速。2006年該團(tuán)隊(duì)設(shè)計(jì)了第2代賽車(BB2),該賽車采用氫燃料電池作為儲(chǔ)能單元,前輪驅(qū)動(dòng)設(shè)計(jì),在2007年的比賽中獲得了485 km/h的最高時(shí)速。在設(shè)計(jì)一種全新的、以更快速度為目標(biāo)的賽車之前,團(tuán)隊(duì)設(shè)計(jì)了一款基于鋰離子電池為儲(chǔ)能單元的過(guò)渡車型,即第2.5代賽車,該賽車采用鋰離子電池作為儲(chǔ)能單元,前輪驅(qū)動(dòng)設(shè)計(jì),在2009年的比賽中獲得了491 km/h的最高時(shí)速。從2010年開(kāi)始,團(tuán)隊(duì)開(kāi)始引入新的設(shè)計(jì)理念,2013年全新的第三代車型開(kāi)始進(jìn)入測(cè)試,該車型采用功率密度更高的永磁同步電機(jī)及控制器,鋰離子電池作為儲(chǔ)能單元,四輪驅(qū)動(dòng)設(shè)計(jì),該賽車?yán)碚撛O(shè)計(jì)時(shí)速可達(dá)640 km/h。第三代賽車在2016年的測(cè)試中獲得了546 km/h的最高時(shí)速。相比于前幾代車型,最高時(shí)速已明顯提升,但要想達(dá)到理論車速,還需對(duì)整車動(dòng)力系統(tǒng)結(jié)構(gòu)及車身優(yōu)化方面進(jìn)行深入分析[3-5]。
本文著重研究高速電動(dòng)汽車動(dòng)力系統(tǒng)結(jié)構(gòu)組成、車身結(jié)構(gòu)優(yōu)化與半實(shí)物仿真實(shí)驗(yàn)平臺(tái)測(cè)試。
1 車身結(jié)構(gòu)
七葉樹(shù)子彈賽車系統(tǒng)參數(shù)如表1所示。
高速電動(dòng)汽車需采取流線型設(shè)計(jì),同時(shí)兼顧車輛動(dòng)力性及車輛安全性。第三代七葉樹(shù)子彈賽車底盤及系統(tǒng)結(jié)構(gòu)如圖1所示。
該車采用四輪驅(qū)動(dòng)結(jié)構(gòu),4臺(tái)永磁同步電機(jī)采用兩兩串聯(lián)的結(jié)構(gòu)分別為前后輪提供驅(qū)動(dòng)力,鋰離子電池共有8組,分別布置于駕駛艙的前后兩側(cè),采用兩兩并聯(lián)的形式為4臺(tái)電機(jī)提供電能,電機(jī)通過(guò)離合器與變速箱連接,為車輪提供驅(qū)動(dòng)力。
駕駛艙位于中部,周圍使用高強(qiáng)度鋼保護(hù)駕駛員安全,與電池組相鄰的兩側(cè)安裝有防火材料,駕駛室內(nèi)部有滅火裝置,同時(shí)設(shè)有急停裝置,可在必要時(shí)切斷高壓供電回路。賽車使用大量碳纖維材料,可以降低車身重量。
賽車目標(biāo)的極限性對(duì)賽車在空氣動(dòng)力學(xué)、底盤結(jié)構(gòu)、懸掛系統(tǒng)、制動(dòng)系統(tǒng)、冷卻系統(tǒng)以及數(shù)據(jù)采集與控制系統(tǒng)等方面提出了極為苛刻的要求[6]。
2 動(dòng)力系統(tǒng)建模
整車動(dòng)力系統(tǒng)采取對(duì)稱式布局,前輪動(dòng)力系統(tǒng)結(jié)構(gòu)如圖2所示。BB3所使用的鋰離子電池系統(tǒng)大約由2 000顆電池芯組成,封裝于8個(gè)電池組中,放置于駕駛艙前后兩側(cè),對(duì)前后軸電機(jī)分別供電,根據(jù)使用情況電池組電壓維持在750 ~900 V,電池組端部集成電池管理系統(tǒng)、保護(hù)電路及預(yù)充電路,8塊電池組其總重量約為1 600 kg,電池組外殼為碳纖維材料。由于賽車車身空間緊湊,因此采取雙電機(jī)同軸連接,通過(guò)離合器和變速箱向車輪輸出驅(qū)動(dòng)力。逆變器集成多種控制算法,可根據(jù)實(shí)際需要合理選擇。逆變器為三相電壓型,額定輸入直流電壓850 V,連續(xù)運(yùn)行電流400 A,控制系統(tǒng)額定電壓24 V,采用水冷卻方式散熱。BB3所使用的是SSS(synchro-self-shifting) 離合器。SSS離合器是純機(jī)械的裝置,其所實(shí)現(xiàn)的功能是,當(dāng)輸入側(cè)的轉(zhuǎn)速傾向超過(guò)輸出側(cè)時(shí),離合器嚙合,輸出側(cè)被驅(qū)動(dòng);當(dāng)輸入側(cè)轉(zhuǎn)速傾向相對(duì)于輸出側(cè)減少時(shí),產(chǎn)生反向力矩,離合器脫開(kāi)[7]。BB3使用的變速箱為兩檔變速,第一檔變比為17∶27,電機(jī)處于最高轉(zhuǎn)速時(shí),可以使車速達(dá)到432 km/h,第二檔變比為25∶24,可以使車速超過(guò)640 km/h[8]。
對(duì)車輛的動(dòng)力系統(tǒng)進(jìn)行精確建模是提高車輛動(dòng)力性、安全性的有效手段,精確的模型也有助于合理的選擇控制策略。動(dòng)力系統(tǒng)模型框圖如圖3所示。
2.1 電機(jī)特性分析
由于在電機(jī)控制方面采用直接轉(zhuǎn)矩控制,因此分析電機(jī)轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系對(duì)車輛獲得最高時(shí)速有著重要意義。電機(jī)轉(zhuǎn)矩、轉(zhuǎn)速以及效率曲線如圖4所示。
電機(jī)轉(zhuǎn)矩、轉(zhuǎn)速與功率曲線如圖5所示。電機(jī)在額定轉(zhuǎn)速下運(yùn)行時(shí),可采用恒轉(zhuǎn)矩控制方式,當(dāng)電機(jī)在額定轉(zhuǎn)速以上運(yùn)行時(shí),可采用恒功率控制方式。電機(jī)電流曲線如圖6所示。
這里忽略機(jī)械傳動(dòng)系統(tǒng)的損耗,電機(jī)的輸出轉(zhuǎn)矩和電機(jī)轉(zhuǎn)速可通過(guò)如下公式計(jì)算:
式中:Tmr為電機(jī)轉(zhuǎn)子轉(zhuǎn)矩;fTmr(ωm,VDC)為基于速度與直流電壓的電機(jī)轉(zhuǎn)矩曲線;λthr為轉(zhuǎn)矩給定值;Tmo為電機(jī)模型的輸出轉(zhuǎn)矩;Imo為電機(jī)模型的慣量輸出;Imr為轉(zhuǎn)子慣量;αm為電機(jī)加速度;ηg為變速箱效率;TmoL為負(fù)載轉(zhuǎn)矩;ImoL為電機(jī)輸出軸上傳動(dòng)裝置的等效慣量。
雙電機(jī)串聯(lián)控制的核心是如何實(shí)現(xiàn)雙電機(jī)的同步,更新轉(zhuǎn)子轉(zhuǎn)速、位置和定子電流采樣值信息,將兩電機(jī)的轉(zhuǎn)矩和磁鏈預(yù)測(cè)進(jìn)行統(tǒng)一規(guī)劃并滾動(dòng)優(yōu)化,最后選出使價(jià)值函數(shù)最小的電壓矢量輸出至電機(jī)側(cè),實(shí)現(xiàn)在一個(gè)價(jià)值函數(shù)中對(duì)雙永磁同步電機(jī)的控制。即使在輸出轉(zhuǎn)矩不同情況下,仍然能夠確保兩個(gè)電機(jī)獲得相同的轉(zhuǎn)速[9-13]。
2.2 離合器
離合器模型較為簡(jiǎn)單,如果離合器嚙合,電機(jī)轉(zhuǎn)子轉(zhuǎn)矩將傳遞至車輪側(cè),如果離合器分離,車輪動(dòng)力將被切斷。BB3所使用的是自動(dòng)同步離合器,這種離合器可有效防止電機(jī)發(fā)生故障時(shí),車輪被完全鎖死,即
式中:Tco為離合器輸出轉(zhuǎn)矩;Tci為離合器輸入轉(zhuǎn)矩;Ico為離合器輸出等效慣量;Ici為離合器輸入等效慣量;Icis為離合器輸入側(cè)自身慣量;Icos為離合器輸出側(cè)自身慣量;TcL為輸入端的轉(zhuǎn)矩;TcoL為輸出端的負(fù)載轉(zhuǎn)矩;IcL為輸入端的等效慣量;IcoL為輸出端的負(fù)載等效慣量。
2.3 變速箱
變速箱是動(dòng)力系統(tǒng)關(guān)鍵的機(jī)械組成部分,模型也相對(duì)較為復(fù)雜。BB3使用2速變速箱,其參數(shù)計(jì)算公式如下所示:
式中:Tgo為變速箱輸出轉(zhuǎn)矩;Tgi變速箱輸入轉(zhuǎn)矩;Ng為齒輪比;Nf為最終傳動(dòng)比;ηg為變速箱效率;Igo為變速箱輸出等效慣量;Igi為變速箱輸入等效慣量;Ig為變速箱慣量;TgL為變速箱輸入的負(fù)載轉(zhuǎn)矩;TgoL為變速箱輸出的負(fù)載轉(zhuǎn)矩;IgL為變速箱輸入的負(fù)載等效慣量;IgoL為變速箱輸出的負(fù)載等效慣量;Tbs為制動(dòng)軸轉(zhuǎn);Nb輸出軸到制動(dòng)軸的比例;Ibs為制動(dòng)軸等效慣量。
2.4 車輪
車輪是動(dòng)力系統(tǒng)能量輸出的接收端,其作用不可忽視,BB3的車輪模型其參數(shù)計(jì)算公式如下:
式中:αw為車輪加速度;Twi為車輪輸入轉(zhuǎn)矩;re為車輪滾動(dòng)半徑;Fxv{f|r}為車輪在橫軸方向上的牽引力;Iwi為車輪輸入的等效慣量;Iw為車輪慣量;TwL為車輪輸入負(fù)載轉(zhuǎn)矩;IwL為車輪輸入的等效負(fù)載慣量。
BB3采用了2套獨(dú)立的傳動(dòng)系統(tǒng),前后軸傳動(dòng)系統(tǒng)參數(shù)一致。將上述模型進(jìn)行組合可以得到如下驅(qū)動(dòng)電機(jī)及輪速的相關(guān)計(jì)算公式。
輪側(cè)—離合器嚙合:
從動(dòng)力系統(tǒng)方程可以看出,要想實(shí)現(xiàn)對(duì)動(dòng)力系統(tǒng)的系統(tǒng)模擬,需要考慮輸入量與輸出量之間的復(fù)雜關(guān)系,這些模型在仿真實(shí)現(xiàn)中,必須采取模塊化結(jié)構(gòu)。
3 動(dòng)力損耗
為了使賽車實(shí)現(xiàn)高速運(yùn)行,汽車性能仿真平臺(tái)的建立應(yīng)考慮多方面因素,包括風(fēng)阻、傳動(dòng)系統(tǒng)損耗和車身優(yōu)化[14]。
車輛在行駛狀態(tài)下其損耗主要包括三個(gè)方面:風(fēng)阻損耗、車輪滾動(dòng)損耗、傳動(dòng)系統(tǒng)損耗。如圖7所示。
當(dāng)車速逐漸增加時(shí),風(fēng)阻損耗將呈指數(shù)形式增大,風(fēng)阻也是車輛能否達(dá)到理論最高時(shí)速的決定性因素。當(dāng)車輪的最大驅(qū)動(dòng)力與3種損耗所產(chǎn)生的制動(dòng)力平衡時(shí),車輛會(huì)達(dá)到最高時(shí)速,因此對(duì)流線型車身結(jié)構(gòu)的優(yōu)化顯得格外重要。
為了驗(yàn)證車身設(shè)計(jì)的結(jié)果,在路試之前引入風(fēng)洞實(shí)驗(yàn)環(huán)節(jié)。BB3風(fēng)洞測(cè)試的主要目的是確定車身設(shè)計(jì)的關(guān)鍵環(huán)節(jié),包括車頭設(shè)計(jì)、尾翼尺寸等。BB3風(fēng)洞模型是在北卡羅來(lái)納州穆?tīng)査咕S爾的Penske技術(shù)集團(tuán)(PTG)風(fēng)洞中進(jìn)行的。該風(fēng)洞具有滾動(dòng)路況和邊界層控制特點(diǎn)的開(kāi)放射流風(fēng)洞。
在風(fēng)洞測(cè)試中所使用的賽車模型為實(shí)車尺寸的1/3。該模型采用高密度泡沫材料,經(jīng)數(shù)控加工完成,風(fēng)洞中的模型如圖8所示。
風(fēng)洞測(cè)試中風(fēng)阻測(cè)試結(jié)果為:車輪風(fēng)阻占車輛總阻力的19%;車體部分風(fēng)阻占總阻力的76%;尾翼部分風(fēng)阻占總阻力的5%。
4 車身優(yōu)化
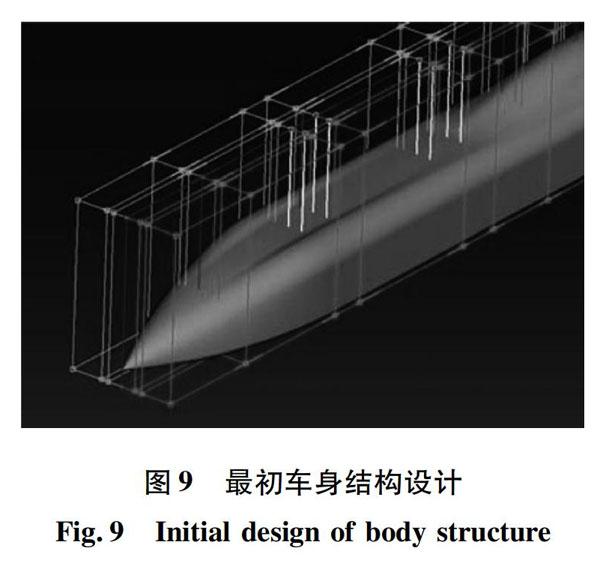
BB3車身最初的設(shè)計(jì)并未兼顧考慮風(fēng)阻系數(shù)與駕駛員視野之間的關(guān)系,當(dāng)車輛處于高速運(yùn)行狀態(tài)時(shí),駕駛員視野會(huì)隨著車速的提高而變窄。最初的車身結(jié)構(gòu)如圖9所示。擋風(fēng)玻璃的最高處與前車身兩側(cè)護(hù)舷的高度差僅為300 mm。
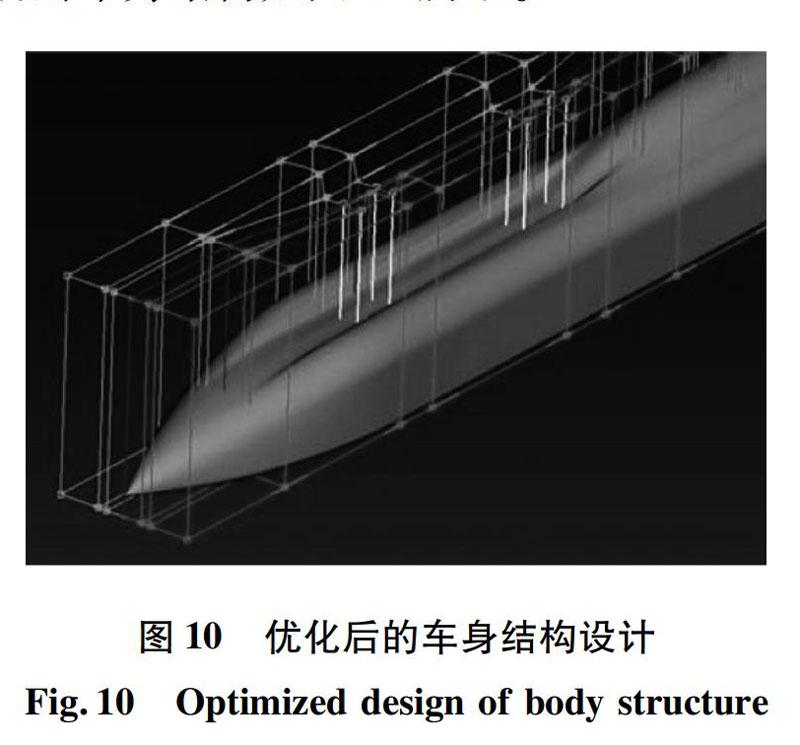
在車身結(jié)構(gòu)優(yōu)化過(guò)程中,將駕駛員視野作為首要考慮的因素。由于受車身內(nèi)部空間及電氣系統(tǒng)安裝位置的限制,只能在有限程度內(nèi)增大駕駛員視野,優(yōu)化后的車身結(jié)構(gòu)如圖10所示。
優(yōu)化方案采取將車身中部設(shè)計(jì)成凹陷結(jié)構(gòu),凹槽最大深度為48 mm,兩側(cè)護(hù)舷高度經(jīng)優(yōu)化后降低30 mm,在擋風(fēng)玻璃高度不變的情況下,其傾角最多由原來(lái)的13°增加至15.5°。凹陷結(jié)構(gòu)設(shè)計(jì)如圖11所示。
針對(duì)上述方案進(jìn)行動(dòng)力學(xué)仿真研究,與原設(shè)計(jì)方案相比,車身阻力略有增加,約為7.1 N。
駕駛員坐在艙內(nèi),只能通過(guò)擋風(fēng)玻璃底部的一個(gè)小區(qū)域觀察跑道,擋風(fēng)玻璃傾斜角的設(shè)計(jì)也要深入研究,角度過(guò)小會(huì)影響駕駛員視線,角度過(guò)大會(huì)增加迎風(fēng)面積,綜合考慮擋風(fēng)玻璃傾斜角、駕駛員視野以及空氣阻力,需對(duì)擋風(fēng)重新進(jìn)行建模研究。分別對(duì)5°~20°傾斜角展開(kāi)研究,圖12為傾斜角5°、10°、15°和20°四種典型角度。
仿真中發(fā)現(xiàn),在5°~10°范圍內(nèi),角度的變化對(duì)空氣阻力的影響較為緩慢,而增加至20°時(shí),空氣阻力增長(zhǎng)幅度明顯加快,角度與空氣阻力的關(guān)系如表2所示。
同時(shí)考慮駕駛員最大視野及空氣阻力等因素,擋風(fēng)玻璃的傾角由原來(lái)的10°增加至18°。
原始車身設(shè)計(jì)方案與優(yōu)化后的車身設(shè)計(jì)方案對(duì)比如圖13所示。在采取車身中部凹陷結(jié)構(gòu)和新的擋風(fēng)玻璃結(jié)構(gòu)后,車身阻力增加約4.5 N。雖然新的車身結(jié)構(gòu)使整車風(fēng)阻有所增加,但駕駛員的視野在車輛高速行駛時(shí)得到明顯改善。
高速停車的主要方法是通過(guò)減速傘制動(dòng),減速傘安裝于汽車尾部,減速傘管的末端是開(kāi)放式的,高速空氣流在車輛末端產(chǎn)生了較大的壓差阻力。
圖14顯示了640 km/h的剪切應(yīng)力等值線圖。圖中,剪切應(yīng)力的范圍被限制在0~8 N/m2之間的一個(gè)非常低的范圍內(nèi)。通常來(lái)說(shuō),大部分車輛的剪應(yīng)力值遠(yuǎn)超過(guò)8 N/m2。其原因是在車輛的尾部,由于氣流分離,剪切應(yīng)力急劇下降。這種反向流動(dòng)是由于車輛尾部的幾何形狀和壓力分離引起的,同時(shí)也造成了壓差阻力。
該問(wèn)題的解決方案是使用減速傘罩,減速傘罩可以使車輛尾部形成尖的幾何形狀,從而有效了減少壓差阻力。車尾幾何形狀優(yōu)化如圖15所示。右圖為結(jié)構(gòu)優(yōu)化后的車尾。
5 系統(tǒng)臺(tái)架與仿真測(cè)試
在優(yōu)化車身結(jié)構(gòu)的基礎(chǔ)上,通過(guò)搭建實(shí)驗(yàn)臺(tái)架來(lái)進(jìn)一步驗(yàn)證電機(jī)及控制器驅(qū)動(dòng)能力、找尋最優(yōu)控制策略、驗(yàn)證傳動(dòng)系統(tǒng)可靠性、驗(yàn)證通信系統(tǒng)抗干擾能力,并通過(guò)臺(tái)架測(cè)試找到降低電與機(jī)械損耗的方法,以此來(lái)保證BB3能夠?qū)崿F(xiàn)640 km/h的目標(biāo)。實(shí)驗(yàn)臺(tái)架如圖16所示。
實(shí)驗(yàn)臺(tái)架采取電機(jī)對(duì)拖方式,驅(qū)動(dòng)電機(jī)與負(fù)載電機(jī)均采取雙電機(jī)串聯(lián)方式,實(shí)驗(yàn)過(guò)程中,能量由電源流向驅(qū)動(dòng)電機(jī),而后經(jīng)過(guò)負(fù)載電機(jī)返回電源側(cè),其間損失的能量為控制器損耗,電機(jī)銅耗以及傳動(dòng)系統(tǒng)的機(jī)械損耗[15]。能量傳遞如圖17所示。
將實(shí)驗(yàn)臺(tái)架及車體相關(guān)參數(shù)如電機(jī)轉(zhuǎn)矩、轉(zhuǎn)速、車重、加速度、換擋時(shí)間、變速箱齒輪比等與仿真軟件對(duì)接,通過(guò)仿真軟件可以對(duì)車輛的高速運(yùn)行性能進(jìn)行進(jìn)一步估算。仿真軟件中包括動(dòng)力系統(tǒng)模型、傳動(dòng)系統(tǒng)模型、空氣動(dòng)力學(xué)模型,可以實(shí)現(xiàn)對(duì)BB3的啟動(dòng)、加速過(guò)程的模擬。這里分別對(duì)車身優(yōu)化前后進(jìn)行了模擬實(shí)驗(yàn),模擬實(shí)驗(yàn)結(jié)果如圖18、圖19所示。
模擬結(jié)果表明,對(duì)車身中部采取了凹陷結(jié)構(gòu)同時(shí)增大了擋風(fēng)玻璃傾斜角,使駕駛員視野得到優(yōu)化,但帶來(lái)的負(fù)面影響是車身風(fēng)阻有所增加。通過(guò)圖18、圖19對(duì)比可以看出,優(yōu)化前車輛具有更好的加速效果,優(yōu)化后,車輛的加速更為平穩(wěn),在提升車輛安全性的基礎(chǔ)上,車輛完全可以達(dá)到640 km/h的目標(biāo)。
6 結(jié) 論
由于第三代七葉樹(shù)子彈賽車在動(dòng)力系統(tǒng)、傳動(dòng)系統(tǒng)、車身結(jié)構(gòu)、駕駛員安全等方面做了重新的設(shè)計(jì)并通過(guò)優(yōu)化車身進(jìn)一步提高車輛安全性,同時(shí)建立了更完善的數(shù)學(xué)模型,640 km/h的目標(biāo)是能夠?qū)崿F(xiàn)的,后續(xù)工作將圍繞車身輕量化和系統(tǒng)可靠性展開(kāi)研究,同時(shí)進(jìn)一步優(yōu)化整車通信網(wǎng)絡(luò)。
參 考 文 獻(xiàn):
[1] HILLSTROM E T,CANOVA M,GUEZENNEC Y.Modeling the cathode pressure dynamics in the Buckeye Bullet II 540 kW hydrogen PEM fuel cell system [J].Journal of Power Sources,2013,241: 33.
[2] BIANCOLINI M E,RENZI F,GIORGIOR.Design of a lightweight chassis for the land speed record vehicle Buckeye Bullet 2 [J].International Journal of Vehicle Design,2007,44(3-4): 379.
[3] EVANS B,ROSE C.Simulating the aerodynamic characteristics of the Land Speed Record Vehicle Bloodhound SSC [J].Proceedings of the Institution of Mechanical Engineers,Part D: Journal of Automobile Engineering,2014,228(10): 1127.
[4] DOUCETTE R T,MCCULLOCH M D.A comparison of high-speed flywheels,batteries,and ultra-capacitors on the bases of cost and fuel economy as the energy storage system in a fuel cell based hybrid electric vehicle [J].Journal of Power Sources,2011,196(3): 1163.
[5] HUTCHINSON H.Zapping the record: the aptly named Buckeye Bullet speeds to a new standard for heavy electric cars [J].Mechanical Engineering,2004,126(12): 48.
[6] 周凱,臧經(jīng)倫.超高速電動(dòng)汽車動(dòng)力系統(tǒng)的結(jié)構(gòu)與性能研究[J].汽車工程,2017,39(2):127.
ZHOU Kai,ZANG Jinglun.A research on the structure and performance of powertrain in a ultrahigh speed electric vehicle [J].Automotive Engineering,2017,39(2):127.
[7] AUSTIN B K.Electro-thermal dynamics and the effects of generalized discontinuous pulse width modulation algorithms on high performance variable frequency drives [D].Columbus: The Ohio State University,2014.
[8] CARRINGTON B.Aerodynamic Development of the Buckeye Bullet 3 Electric Landspeed Vehicle [D].Columbus: The Ohio State University,2012.
[9] 戈寶軍,羅前通,王立坤,等.高速永磁同步電動(dòng)機(jī)鐵耗分析[J].電機(jī)與控制學(xué)報(bào),2020,24(4): 32.
GE Baojun,LUO Qiantong,WANG Likun,et al.Analysis of iron losses of high-speed permanent magnetsynchronous motor [J].Electric Machines and Control,2020,24(4): 32.
[10] 周凱,孫彥成,王旭東,等.永磁同步電機(jī)的自抗擾控制調(diào)速策略[J].電機(jī)與控制學(xué)報(bào),2018,22(2):57.
ZHOU Kai,SUN Yancheng,WANG Xudong,et al.Active disturbance rejection control of PMSM speed control system [J].Electric Machines and Control,2018,22(2):57.
[11] 陳思溢,皮佑國(guó).基于滑模觀測(cè)器與滑模控制器的永磁同步電機(jī)無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2016,31(12):108.
CHEN Siyi,PI Youguo.Non-position sensor control of permanent magnet synchronous motor based on sliding mode observer and sliding mode controller[J].Transactions of China Electrotechnical Society,2016,31(12):108.
[12] 史婷娜,劉華,陳煒,等.考慮逆變器非線性因素的表貼式永磁同步電機(jī)參數(shù)辨識(shí)[J].電工技術(shù)學(xué)報(bào),2017,32(7):77.
SHI Tingna,LIU Hua,CHEN Wei,et al.Parameter identification of surface-mount permanent magnet synchronous motor considering nonlinear factors of inverter[J].Transactions of Electrical Engineering,2017,32(7):77.
[13] 魏海峰,韋漢培,張懿,等.永磁同步電機(jī)電流控制模型的無(wú)傳感器運(yùn)行[J].電機(jī)與控制學(xué)報(bào),2018,22(8):75.
WEI Haifeng,WEI Hanpei,ZHANG Yi,et al.Sensorless operation of current control model for permanent magnet synchronous motor[J].Electric Machines and Control,2018,22(8):75.
[14] KAI Z.Powertrain analysis and dynamic performance simulation of ultra-high-speed electric vehicle[J].International Journal of Electric and Hybrid Vehicles,2017,9(1):33.
[15] KREN L.Wired for speed: the battery powered Buckeye Bullet streamliner returns to Bonneville for another the world speed record[J].Machine Design,2003,75(12):54.
(編輯:劉素菊)
收稿日期: 2019-03-06
基金項(xiàng)目:國(guó)家國(guó)際科技合作重點(diǎn)專項(xiàng)(2019YFE0100200)
作者簡(jiǎn)介:周 凱(1982—),男,博士,教授,博士生導(dǎo)師,研究方向?yàn)樾履茉雌囯娏﹄娮酉到y(tǒng);
任 浩(1996—),男,碩士研究生,研究方向?yàn)橛来磐诫姍C(jī)無(wú)傳感器矢量控制;
金寧治(1980—),男,博士,副教授,研究方向?yàn)橛来磐诫姍C(jī)驅(qū)動(dòng)控制;
劉宇博(1988—),男,博士研究生,研究方向?yàn)橛来磐诫姍C(jī)驅(qū)動(dòng)控制;
艾 民(1993—),男,碩士研究生,研究方向?yàn)橛来磐诫姍C(jī)弱磁控制。
通信作者:周 凱