中級(jí)轎車E型多連桿后懸架結(jié)構(gòu)解析及特性分析
2020-10-09 10:19:56卓書亮
汽車世界·車輛工程技術(shù)(上) 2020年5期
卓書亮


摘 要:本文主要通過(guò)對(duì)E型多連桿后懸架的結(jié)構(gòu)分析,基于ADAMS/Car模塊,建立E型多連桿后懸架參數(shù)化模型,通過(guò)仿真研究E型多連桿后懸架結(jié)構(gòu)參數(shù)與車輪定位參數(shù)、輪距等影響關(guān)系,利用 ADAMS/Insight建立E型多連桿后懸架優(yōu)化模型,并進(jìn)行懸架參數(shù)優(yōu)化設(shè)計(jì)。
關(guān)鍵詞:E型多連桿;后懸架;結(jié)構(gòu)分析;幾何定義;ADAMS
0 前言
E型多連桿后懸架是近幾年來(lái)迅速發(fā)展起來(lái)的一種懸架結(jié)構(gòu),與非獨(dú)立懸架相比,能同時(shí)兼顧更好的乘坐舒適性和操縱穩(wěn)定性。
1 結(jié)構(gòu)特征
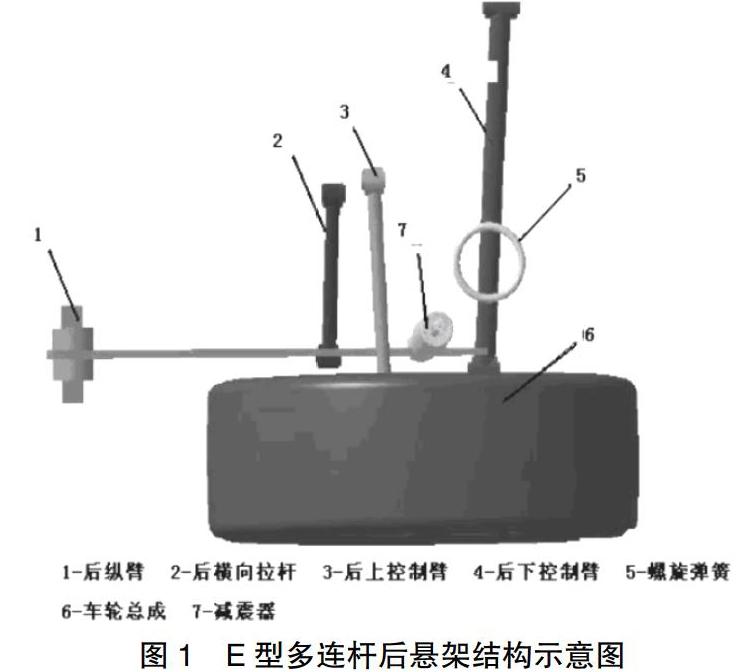
如圖1所見(jiàn),后縱臂、后橫向拉桿、后上控制臂和后下控制臂形成“E”布置,故命名為E型多連桿后懸架。
2 功能分析
2.1 前束角控制
前束控制臂和下控制臂等長(zhǎng)的情況,當(dāng)車輪上下跳動(dòng)時(shí),運(yùn)動(dòng)軌跡是半徑相同的圓弧,所以車輪在正常的平衡位置下設(shè)定的前束不會(huì)改變。前束控制臂和下控制臂不等長(zhǎng),當(dāng)車輪上下跳動(dòng),運(yùn)動(dòng)軌跡是半徑不同的圓弧,假設(shè)前束控制連桿較短,則無(wú)論車輪如何跳動(dòng),前束都會(huì)比平衡位置時(shí)增加。
2.2 外傾角控制
對(duì)于獨(dú)立懸架而言,合理的車輪外傾變化是必要的,對(duì)于該E型多連桿懸架因后縱臂襯套的扭轉(zhuǎn)剛度較大,外傾自由度無(wú)法全部通過(guò)襯套的扭轉(zhuǎn)變形來(lái)提供,為此該臂設(shè)計(jì)成片狀沖壓結(jié)構(gòu),中間部位設(shè)計(jì)成狀,并設(shè)有開(kāi)口和角線,從而給車輪提供適當(dāng)?shù)耐鈨A自由度。
2.3 側(cè)傾穩(wěn)定性
2.3.1 后縱臂對(duì)側(cè)傾轉(zhuǎn)向的影響
后縱臂是影響側(cè)傾轉(zhuǎn)向的重要因素,若鉸鏈點(diǎn)在前,且該點(diǎn)的位置比車輪中心高,則側(cè)傾后外輪后移,內(nèi)輪前移。若鉸鏈點(diǎn)比前輪中心低,則相反。
2.3.2 各橫向控制臂對(duì)側(cè)傾轉(zhuǎn)向的影響
(1)幾何特性轉(zhuǎn)向。因后橫向拉桿和后下控制臂非等長(zhǎng),非平行配置,通過(guò)運(yùn)動(dòng)分析發(fā)現(xiàn),車輪上下跳時(shí)在后縱臂的影響下均趨于前束變化。
(2)側(cè)向力轉(zhuǎn)向(隨動(dòng)轉(zhuǎn)向)。當(dāng)后下控制臂的布置位置距離車輪中心較近,當(dāng)車輛曲線運(yùn)動(dòng)時(shí)地面對(duì)輪胎產(chǎn)生側(cè)向反作用力F,傳遞到后橫向拉桿和后下控制臂上的力記作F1、F2,通過(guò)力矩平衡原理可得F1和F2。
當(dāng)車輛轉(zhuǎn)彎時(shí),在地面?zhèn)认蛄Φ淖饔孟拢鈧?cè)車輪趨于前張,內(nèi)側(cè)車輪趨于前束。
2.4 縱向順從性(退化性)
2.4.1 縱向緩沖
車輛在道路上行駛時(shí),會(huì)遇到凸起和凹坑而受到縱向沖擊力,設(shè)計(jì)時(shí)積極利用襯套撓曲變形的前后運(yùn)動(dòng),即“縱向順從性”,從而可以起到降低懸架的前后剛性的目的。E型多連桿懸架縱向柔性的設(shè)計(jì)要點(diǎn):
(1)襯套X方向在滿足縱向柔性要求的同時(shí),不可過(guò)于柔軟,否則,當(dāng)汽車加速或制動(dòng)時(shí),車輪在縱向力的作用下因位移過(guò)大而發(fā)生擺動(dòng),從而影響操縱穩(wěn)定性。(2)襯套X方向通過(guò)合理的腰型孔設(shè)計(jì)用來(lái)保證所需要的斜率呈遞增變化的靜彈性特性。(3)拖臂襯套在Z方向上會(huì)承受一定的垂直載荷。同時(shí)為了能夠有效地傳遞橫向穩(wěn)定桿產(chǎn)生的力,在Fz方向上的彈性特性幾乎是線性的。
2.4.2 縱向力柔性轉(zhuǎn)向和幾何特性轉(zhuǎn)向
采用前束角變化來(lái)提高操縱穩(wěn)定性的方法,稱之為懸架的“車輪前束控制機(jī)能”,引起前束角變化的現(xiàn)象稱之為“柔性轉(zhuǎn)向效應(yīng)”,可分為縱向力柔性轉(zhuǎn)向和橫向力柔性轉(zhuǎn)向。
(1)縱向柔性轉(zhuǎn)向和幾何特性轉(zhuǎn)向。對(duì)該研究對(duì)象,在縱向力的作用下,由于后下控制臂的退讓性,車輪將向后方移動(dòng)。這時(shí)因后橫向拉桿比后下控制臂設(shè)計(jì)的較短,從幾何學(xué)上講,在縱向力作用下車輪將向前束方向回轉(zhuǎn)。
(2)橫向連桿和后下控制臂的柔性轉(zhuǎn)向。當(dāng)縱向力進(jìn)入后,前后力作用于縱拖臂,根據(jù)力矩的平衡,橫向連桿承受拉力,后下控制臂承受壓縮力,在各襯套的撓曲變形下,車輪將向負(fù)前束方向回轉(zhuǎn)。
3 運(yùn)動(dòng)特性分析
3.1 運(yùn)動(dòng)學(xué)模型建立
建立相應(yīng)的ADAMS仿真分析模型,如圖2。各零件連接關(guān)系如圖3,硬點(diǎn)坐標(biāo)如表1。
3.2 運(yùn)動(dòng)學(xué)特性分析
ADAMS中輸入Vertical(Parallel)Mode,對(duì)于本文研究的車輛,取其跳動(dòng)范圍為常用的 -50~+50 mm,計(jì)算該E型多連桿式懸架的車輪外傾角、車輪前束、車輪輪距等的輪跳特性。
3.2.1 后輪前束角仿真
圖4為車輪前束角隨車輪跳動(dòng)的變化曲線。在車輪跳動(dòng)過(guò)程中,希望在車輪上跳時(shí)產(chǎn)生正的前束,下跳時(shí)產(chǎn)生負(fù)前束,這樣可以使得后軸具有側(cè)傾不足轉(zhuǎn)向特性,有利于改善汽車操縱穩(wěn)定性能。從圖4中可以看出,在車輪跳動(dòng)±50 mm的行程內(nèi),后輪前束角的變化范圍為-0.26~0.76,變化趨勢(shì)基本符合設(shè)計(jì)要求,但變化范圍有些過(guò)大。
3.2.2 后輪外傾角仿真
通常設(shè)計(jì)中車輪都具有一定的外傾角,當(dāng)車輪向上跳動(dòng)時(shí),外傾角一般向負(fù)值方向變化,而下跳時(shí)向正值方向變化,這樣可以減小輪胎的磨損,提高汽車的操縱穩(wěn)定性。一般車輪的后外傾角的變化不宜太大,其范圍為-3°~3°,在車輪跳動(dòng)±50 mm的行程內(nèi),外傾角變化量應(yīng)盡量小于±1°。從圖5中可以看出,后輪外傾角的變化范圍為-2.33°~0.22°,基本符合設(shè)計(jì)要求,但變化量有些過(guò)大。
3.2.3 后輪輪距仿真
輪距變化從側(cè)面反應(yīng)了輪胎的磨損情況,輪距變化越大,輪胎磨損越嚴(yán)重,反之,則越小。從圖6中看到在車輪上跳行程中,輪距變化從0增加到大約8 mm。而在下跳行程中,0減少到大約-13 mm,大于上跳行程。
3.3 參數(shù)優(yōu)化
本文主要針對(duì)后輪前束角→后輪外傾角進(jìn)行優(yōu)化分析,此次優(yōu)化以各后拉桿坐標(biāo)和車身連接點(diǎn)坐標(biāo)為設(shè)計(jì)變量,每個(gè)坐標(biāo)值的變動(dòng)范圍為 - 10~10 mm之間,以車輪跳動(dòng)過(guò)程中車輪外傾角、前束和車輪輪距變化量平均值最小為優(yōu)化目標(biāo)。
車輪前束角優(yōu)化前后對(duì)比,如圖7,優(yōu)化后,前束角的變化量比之前大大的減小,這將對(duì)車輛直線行駛的穩(wěn)定性有顯著提高。
車輪外傾角優(yōu)化前后對(duì)比,如圖8,優(yōu)化后,外傾角的變化量為-1.25°~-0.1°,更接近于-1.0°~1.0°設(shè)計(jì)范圍。
車輪輪距優(yōu)化前后對(duì)比,如圖9,優(yōu)化后的輪距變化量比優(yōu)化前有所改善,輪距的變化范圍從-13~8 mm變?yōu)?9~5 mm,在一定程度上減小了輪胎的磨損,延長(zhǎng)了輪胎的使用壽命。
4 結(jié)論
通過(guò)建立E型多連桿懸架的運(yùn)動(dòng)學(xué)模型,分析了E型多連桿懸架的車輪定位參數(shù)、輪距隨車輪跳動(dòng)量的變化規(guī)律及其對(duì)車輛性能的影響,為今后的進(jìn)一步分析提供了依據(jù)。同時(shí)對(duì)懸架結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化并取得了明顯的效果,符合獨(dú)立懸架的設(shè)計(jì)要求,為提高懸架的性能提供了有力的幫助。但是,由于建模時(shí)沒(méi)有考慮彈性元件的影響,會(huì)使結(jié)果精度略有降低。
參考文獻(xiàn):
[1]劉維信.汽車設(shè)計(jì)[M].北京:清華大學(xué)出版社,2001.
[2]余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2000.
[3]馬自達(dá)汽車株式會(huì)社.后懸架裝置:中國(guó),專利申請(qǐng)?zhí)?200610126235.0[P].2006.
[4]趙廣輝.汽車轉(zhuǎn)向運(yùn)動(dòng)特性與懸架系統(tǒng)的關(guān)系[C].北京,2008:3-10.