通信線纜自動架空裝置設計
2020-10-10 01:02:20李洲洋祁瑞帥劉海飛
制造業自動化 2020年9期
關鍵詞:作業
李洲洋,祁瑞帥,劉海飛
(1.西北工業大學 機電學院,西安 710072;2.中國移動通信集團陜西有限公司,西安 710077)
0 引言
目前通信線纜架空作業主要依靠人工作業,需要登桿至高空架設通信線纜,存在危險高、作業條件差、效率低、成本高等多種問題。為解決高空作業難題,實現自動化作業,日本、美國、加拿大等相繼研制了OPGW移動巡檢機器人[1]、TRC懸臂機器人[2]、Serge巡線機器人[3]等高空作業裝置;國內肖功平等人研制了架空高壓線路巡檢小車[4~8],劉曉明等人研制了架空高壓線路除冰機器人[9~13]等高空作業裝置。該類裝置可以實現沿高壓線路的自動巡檢、越障、除冰等功能,但無法應用于通信線纜架空作業過程。
目前,國內尚無針對通信線纜架空作業裝置的研究,通信線纜架空還是依賴人工作業。隨著信息科技和通信需求的不斷發展,傳統的人工作業方式已經難以滿足快速增長的通信線纜架空需求。因此,本文針對通信線纜自動架空技術進行研究,研制能夠實現線纜自動架空的裝置,實現自動化通信線纜架空作業,避免人工作業所帶來的高空作業風險,改善作業條件,提高施工效率,滿足快速發展的通信需求。
1 裝置總體方案設計
1.1 裝置功能需求
目前,通信線纜是通過人工架設,采用圖1所示的V型線纜掛鉤將通信線纜懸掛于鋼絞線上,作業過程包括裝鉤和前行兩個環節。裝鉤過程分為“持鉤納入線纜→扭轉懸掛掛鉤左側鉤→反向扭轉懸掛掛鉤右側鉤”3個步驟,完成當前掛鉤安裝,如圖1所示。完成當前掛鉤安裝后,工人沿鋼絞線向前滑行一定距離,安裝下一個掛鉤。
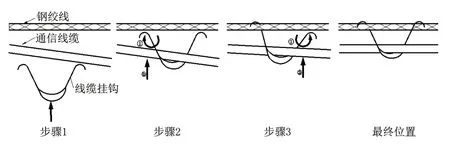
圖1 傳統人工作業裝鉤過程
傳統線纜掛鉤專為手工安裝設計,無法適應自動作業需求。為實現自動化掛鉤安裝,將傳統V型掛鉤改為雙向對拉式結構,如圖2所示。相比傳統掛鉤,新型掛鉤安裝時不需要扭轉,且左右兩側為雙股彈簧,便于自動化操作。采用新掛鉤時,裝鉤過程可分為“掛鉤左右拉開→掛鉤上移→掛鉤左右閉合→掛鉤下移”等4步,即可完成掛鉤的安裝。
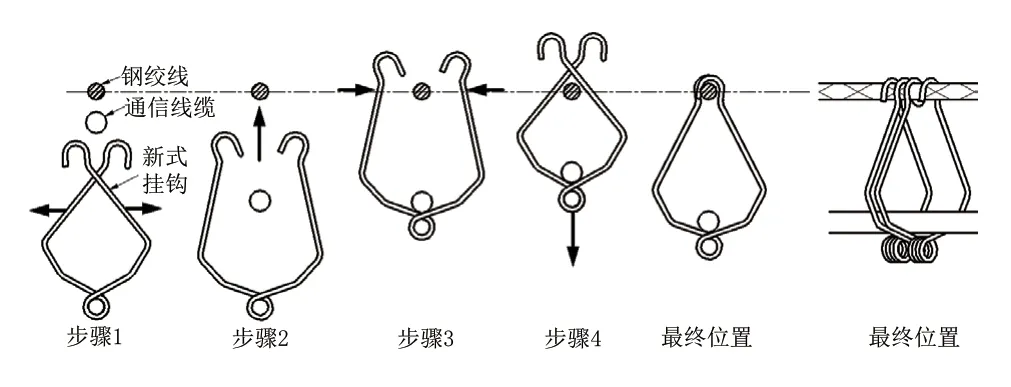
圖2 采用新型掛鉤時的裝鉤過程
參考人工作業過程,采用改進的新型掛鉤,為實現通信線纜自動架空功能,線纜自動架空裝置必須要能夠實現自動喂鉤、自動裝鉤及沿鋼絞線自動前行等基本功能。
1.2 裝置的總體方案
線纜自動架空裝置可分為機械模塊和控制模塊。機械模塊是裝置最重要的主體部分,裝置各個動作的執行、各個功能的實現都需要借助機械模塊相互配合來完成,包括自動喂鉤模塊、掛鉤張拉模塊、掛鉤升降模塊、行走模塊四個基本模塊;控制模塊包括控制系統硬件和軟件兩部分。硬件部分是裝置作業的動力源,包括驅動裝置所必需的主控制器、電機驅動模塊、直流/步進電機、無線通信模塊、運動檢測模塊以及電源供給模塊等,軟件部分控制著各個機構所有動作的產生與功能的實現,包括裝鉤程序、行走程序、無線通信程序、串口通信程序等。線纜自動架空裝置的系統總體方案如圖3所示。
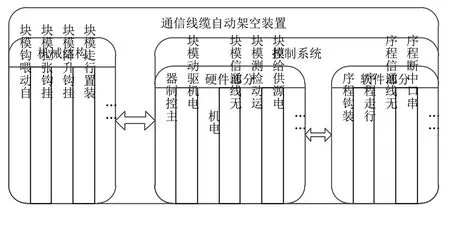
圖3 系統總體方案
2 機械結構設計
為實現通信線纜自動架空功能,對裝置的自動喂鉤模塊、掛鉤張拉模塊、掛鉤升降模塊、行走模塊等4個基本機械模塊進行了結構設計,以實現相應的功能。
2.1 自動喂鉤模塊結構設計
系統采用同步帶機構作為掛鉤傳送裝置,實現自動喂鉤功能,如圖4所示。線纜掛鉤安放在同步帶上的掛鉤座內。工作時,電機驅動帶輪和同步帶運動,將裝載在掛鉤座內的線纜掛鉤向前傳送。當掛鉤到達工作位置時,系統自動停止,從而實現自動喂鉤功能。
2.2 掛鉤張拉模塊結構設計
掛鉤張拉模塊由電機絲杠滑臺和剪刀夾持機構組成,如圖5所示。剪刀夾持機構由剪刀臂、連桿、螺母和絲杠電機組成。電機運動可帶動螺母沿絲杠軸線運動,從而驅動剪刀夾持機構張開、閉合。兩套剪刀夾持機構分別固連在掛鉤兩側的滑臺上。當電機驅動滑臺運動時,可以實現掛鉤兩側剪刀機構的相對收攏和拉開。
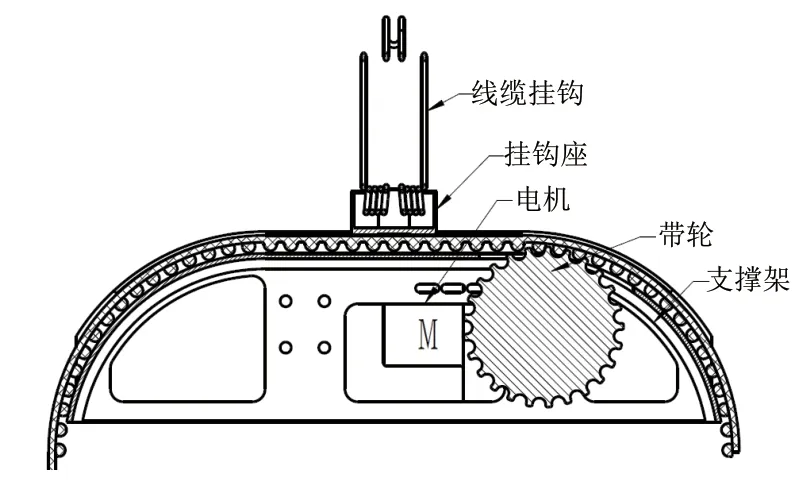
圖4 自動喂鉤模塊
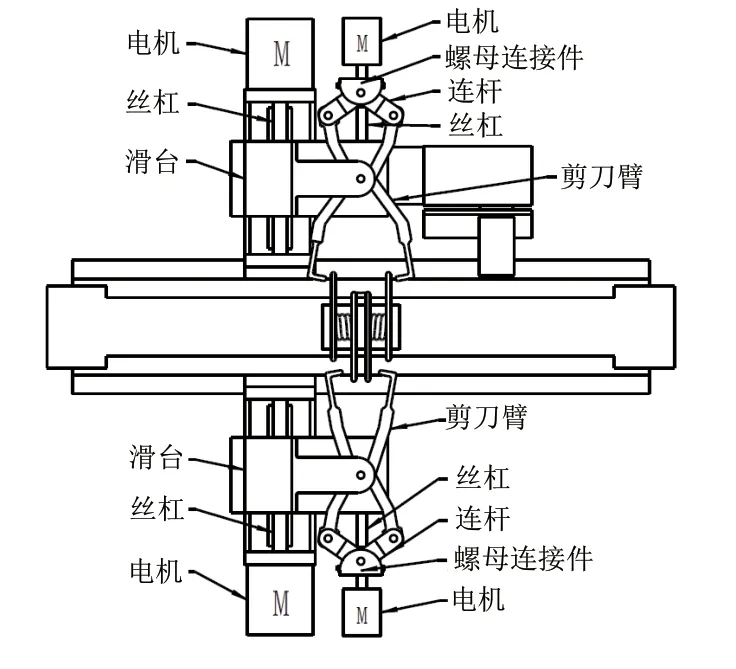
圖5 掛鉤張拉模塊
2.3 升降模塊結構設計
升降模塊采用絲杠-螺母作為驅動機構,如圖6所示。在電機帶動絲杠轉動,從而驅動螺母及連接架沿絲杠軸線上下運動。為保證系統運動的平穩性,在連接架四周增加了導軌-滑塊機構,以保證連接架可沿絲杠軸線豎直運動。
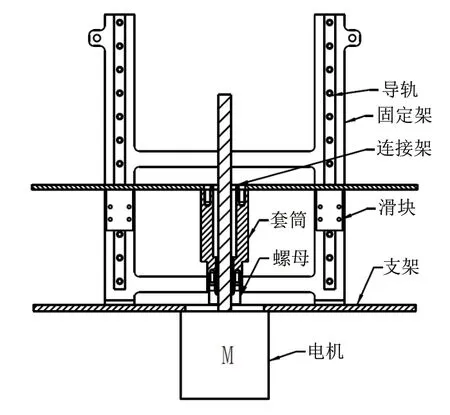
圖6 升降模塊
2.4 行走模塊結構設計
行走模塊采用輪式行走機構,如圖7所示。行走輪由電機通過減速器驅動。為保證裝置的安全性,行走輪截面設計成凹形。工作時,凹形部位壓在鋼絞線上,可防止行走輪滑脫。行走輪上附有橡膠,以增大行走輪與鋼絞線之間的摩擦力,避免裝置在行走過程中出現打滑現象。
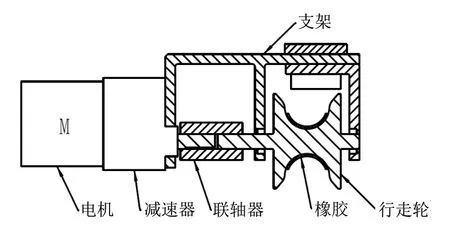
圖7 行走模塊
綜合以上4個基本機械模塊,系統的主體結構如圖8所示。
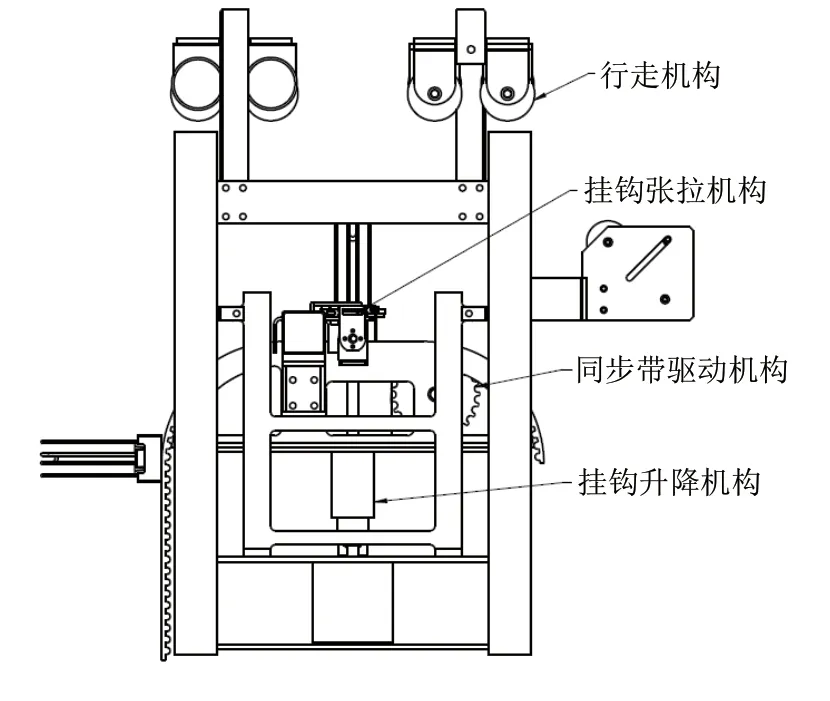
圖8 通信線纜自動架空裝置主體結構
3 通信線纜自動架空作業流程
基于本文所設計的通信線纜自動架空裝置,自動作業過程及詳細步驟如圖9所示。
首先由同步帶及掛鉤座的夾持下,將掛鉤由裝置外部左側運送到裝置中心的工作位置處,如圖9(a)所示;然后掛鉤兩側滑臺相對收攏,帶動兩側的剪刀夾持機構對準掛鉤;此后剪刀機構在螺母的驅動下作閉合運動,夾持住掛鉤兩側,如圖9(b)所示;接下來,兩側滑臺帶動剪刀機構向兩側拉開,拉開線纜掛鉤,如圖9(c)所示。在升降機構的帶動下,滑臺、剪刀機構以及被拉開的掛鉤整體向上運動,直至掛鉤上鉤處高于鋼絞線。在此過程中,通信線纜將自動納入掛鉤內部,如圖9(d)所示;下一步兩側滑臺相對收攏,隨后剪刀機構在電機的驅動下張開,釋放掛鉤,如圖9(e)所示;此后,兩側滑臺帶動剪刀機構向兩側拉開,使掛鉤張拉模塊復位,如圖9(f)所示;在升降機構的帶動下,滑臺、剪刀機構以及掛鉤整體向下運動,在掛鉤座的夾持牽引下,使掛鉤夾緊到綱絞線上,并從掛鉤座脫離,如圖9(g)所示,完成掛鉤的安裝。然后由行走輪驅動裝置沿綱絞線前行一定的距離,如圖9(h)所示,即可安裝下一個掛鉤。
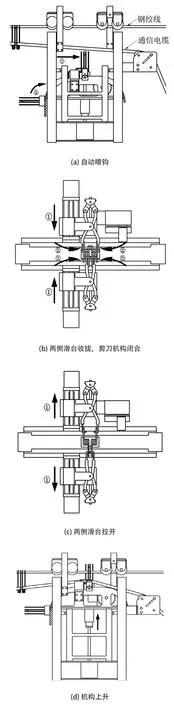
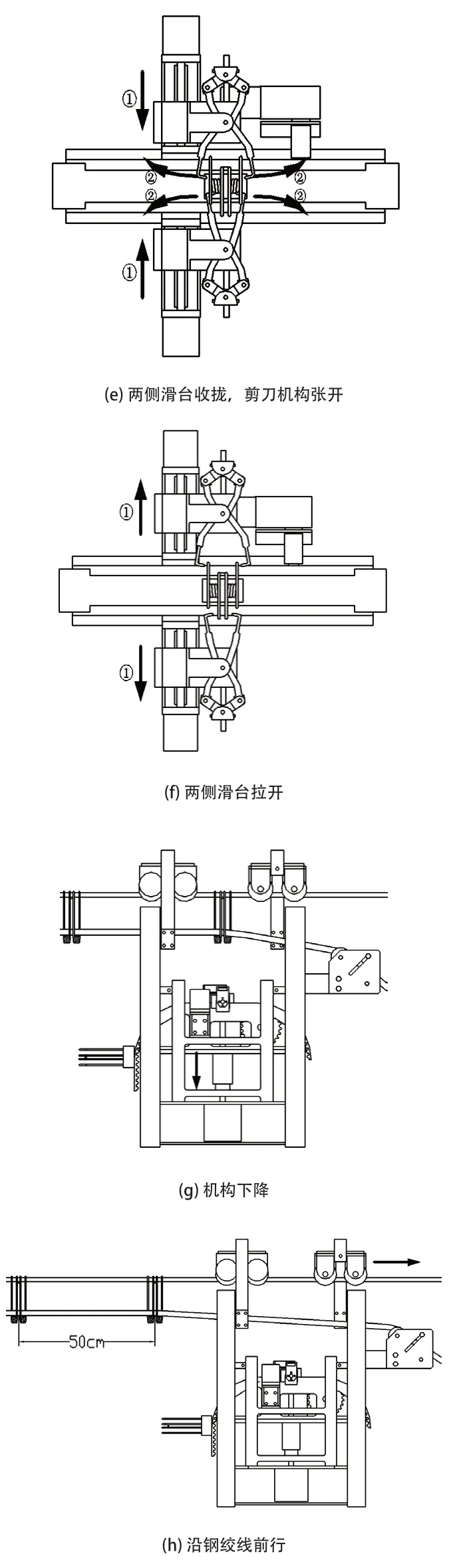
圖9 線纜架空自動作業過程
4 控制系統設計方案
為實現對線纜架空裝置機械部分的驅動與運動控制,設計了線纜架空裝置控制系統,控制系統結構框圖如圖10所示。
控制系統包含控制軟件和硬件兩部分。控制軟件包括裝鉤控制程序、行走控制程序、無線通信程序、運動檢測程序等多個功能模塊。控制系統硬件包含主控制器、電機驅動模塊、直流/步進電機、無線通信模塊、運動檢測模塊以及電源供給模塊等。在控制軟件的支持下,主控制器通過無線通信模塊接收遙控終端控制指令,通過PWM脈寬調節機制控制電機驅動模塊,驅動各直流/步進電機運動,實現自動掛鉤和行走等功能。在工作過程中,主控制器通過ADC采集來自運動檢測模塊的系統狀態及位置反饋數據,實現對作業過程的實時監測。電源供給模塊采用24V鋰電池作為動力源,通過電壓轉換滿足各個模塊的供電需求。
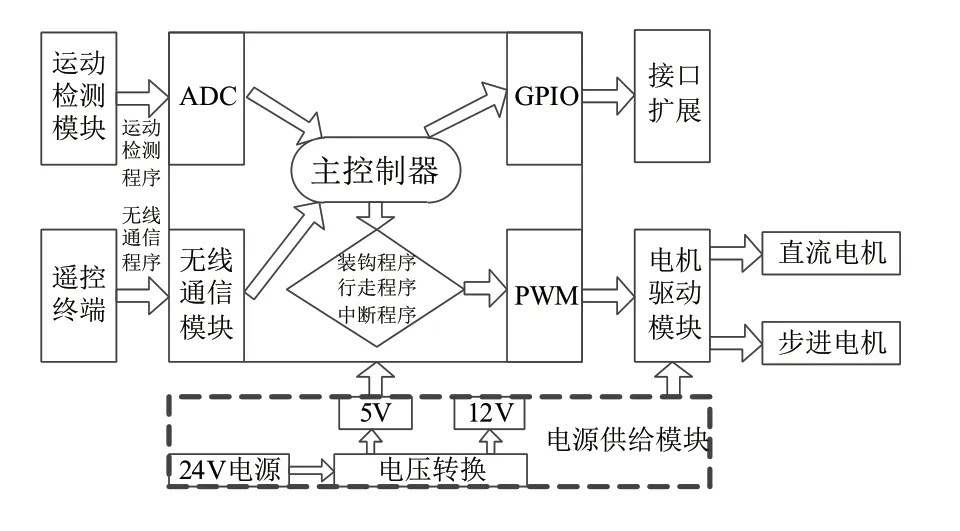
圖10 控制系統結構框圖
5 線纜架空裝置實驗驗證
基于本文所提出的設計方案,經過零件加工、元器件選擇、控制軟件開發和組裝調試,制作了通信線纜自動架空裝置原理樣機,并先后在實驗室和施工現場完成了功能測試,分別如圖11、圖12所示。實驗表明本裝置完成了預期的設計功能,實現了通信線纜的自動架空功能。
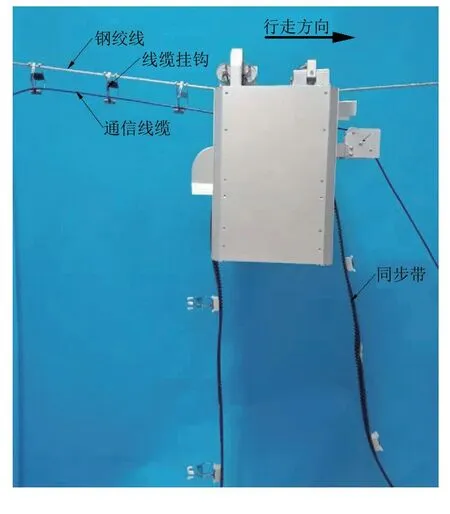
圖11 線纜架空裝置實驗室測試
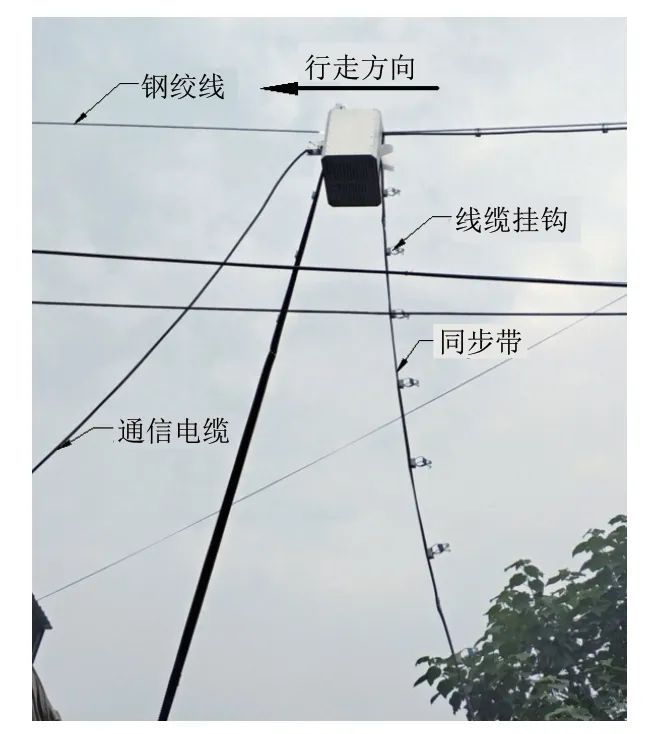
圖12 線纜架空裝置現場測試
6 結語
為解決通信線纜人工架空存在的問題,通過分析線纜架空的作業過程和功能需求,設計了適合自動化操作的新型掛鉤,基于新型掛鉤,對通信線纜自動架空裝置的結構設計、作業流程、控制系統等關鍵技術進行了深入地研究,制作了通信線纜自動架空裝置原理樣機,并完成了相關的功能測試,實現了通信線纜的自動架空功能。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
