
無人機輔助的NOMA網絡用戶分組與功率分配算法
2020-10-11 03:07:34李國權林金朝徐勇軍黃正文劉挺
通信學報 2020年9期
李國權,林金朝,徐勇軍,黃正文,劉挺
(1.重慶郵電大學通信與信息工程學院,重慶 400065;2.光電信息感測與傳輸技術重慶市重點實驗室,重慶 400065;3.西安郵電大學陜西省信息通信網絡及安全重點實驗室,陜西 西安 710121;4.布魯內爾大學電子與計算機工程系,倫敦 UB8 3PH)
1 引言
面對重大自然災害和緊急突發事件,有效的應急通信對于提高救援效率和保障人民生命安全具有重要的意義。當發生事故或災難時,當地的固定基站通常不能正常使用,而下一代通信系統中的無人機(UAV,unmanned aerial vehicle)具有更好的靈活性[1],特別是對于偏遠地區或缺乏基站設施的地區,應快速構建無人機空中基站。因此,無人機為有序應對突發事件,盡可能地降低其危害程度做出了重要的貢獻[2]。針對應急通信場景下頻譜資源稀缺及基站毀壞的問題,提升無人機系統的頻譜效率具有重要意義。
非正交多址接入(NOMA,non-orthogonal multiple access)技術具有較高的頻譜效率與較好的公平性,被視為5G乃至下一代無線通信系統的關鍵技術[3-5]。在功率域NOMA系統中,信道條件好的用戶被分配較低的功率分配因子,而信道條件差的用戶被分配較高的功率分配因子。在接收端,利用串行干擾消除(SIC,successive interference cancellation)技術來消除部分用戶的干擾,實現更多用戶在同一時頻域復用,從而提升頻譜效率[6]。
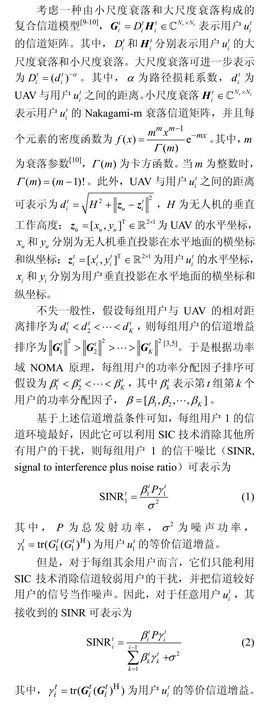
將NOMA引入無人機通信系統,能夠充分利用功率域資源,從而保證空中基站為地面用戶更好地傳輸信號(下行鏈路)或者保證空中無人機為地面用戶更好地傳輸信號(上行鏈路)。無人機系統主要受到視線(LoS,line of sight)鏈路的影響,所以傳統的瑞利衰落不適合表示其信道特性[7]。
關于UAV-NOMA系統的研究,按照信道特性分類,主要有空對地(A2G,air to ground)信道、Nakagami-m衰落信道、路徑損耗信道和萊斯信道。針對考慮A2G信道的UAV-NOMA系統,文獻[8]研究了不同城市環境下的和速率最大化問題,同時對比了固定與動態UAV高度的影響,從而減少能耗。在相同的模型下,文獻[9]考慮了多用戶服務質量約束,將能效最大化問題等效為非線性分式規劃問題,其中基于信道條件的用戶分組方案被考慮。針對考慮Nakagami-m衰落信道的UAV-NOMA系統,文獻[10]提出了以UAV為中心的卸載操作策略和以用戶為中心的應急通信策略,分別適用于密集網絡與需要同時服務所有用戶的場景,從而提升系統覆蓋概率。文獻[11]則考慮了LoS鏈路與非視線(NLoS,non-line of sight)鏈路的影響,利用隨機幾何模型來模擬用戶與UAV的位置,并且推導了系統中斷概率與遍歷速率的閉式表達式。針對LoS鏈路與NLoS鏈路場景,文獻[12]首先根據訪問優先級確定用戶分組方案,再利用消息傳遞算法進行子信道分配,最后聯合優化UAV-NOMA系統的發射功率。文獻[13]則研究了相同模型下的多個旋轉無人機輔助的上行NOMA系統,并提出了基于K均值的UAV部署方案和基于坐標的用戶分組方案。同時,考慮了最小服務質量約束,聯合優化基于總功率最小化的資源分配問題。結果表明,UAV-NOMA系統的頻譜效率和能量效率得到有效提升[12-13]。針對考慮路徑損耗模型的UAV-NOMA系統,文獻[14]考慮了最小可達速率需求,研究了聯合UAV位置與功率分配優化問題來減小發射功率。文獻[15]研究了聯合UAV位置、接納控制與功率分配優化問題,利用懲罰函數法與連續凸逼近法來求解卡羅需-庫恩-塔克(KKT,Karush-Kuhn-Tucher)收斂點,從而提高UAV-NOMA系統的用戶接入數。此外,文獻[16]將無人機引入車聯網,利用對偶分解法,通過聯合優化鏈路切換次數與鏈路傳輸速率來提高UAV-NOMA系統吞吐量。針對考慮萊斯信道的UAV-NOMA系統,文獻[17]考慮了上行干擾消除約束,研究了聯合UAV位置、地面基站位置、預編碼優化問題,從而提升地面用戶的和速率。在相同的信道模型下,文獻[18]研究了上行UAV-NOMA系統的預編碼優化問題,考慮了SIC約束和速率需求約束,利用一階泰勒展開將上述優化問題轉化為二階圓錐規劃問題,從而提升系統和速率。文獻[19]研究了總發射功率約束、總帶寬約束、UAV高度約束、天線波束寬度約束條件下的最大最小速率優化問題,利用路徑追蹤算法求解,得到有效的UAV-NOMA系統和速率提升。此外,文獻[20]研究了UAV旋轉軌跡的優化問題,從而降低了下行UAV-NOMA系統的中斷概率。
上述關于UAV-NOMA系統的工作大多只考慮UAV高度、位置、軌跡的影響,而缺乏對地面用戶分組與功率分配聯合優化問題的研究。因此,本文主要研究UAV-NOMA系統中的動態用戶分組與功率分配算法,利用圖論中的最大割定理與輔助變量法,使UAV-NOMA系統的和速率性能得到較好的提升。本文主要貢獻如下。
1)在下行單小區多組場景下,建立了一個基于無人機輔助的NOMA通信網絡模型,其中一個無人機作為空中基站,服務多個地面用戶,而這些地面用戶被均分到多個組。傳統的UAV-NOMA系統通常假設每組用戶數為2,即每組只包含一個近用戶和一個遠用戶。為了更符合實際,本文所提的UAV-NOMA系統將考慮組內用戶數更多的情形。
2)為了進一步提升UAV-NOMA系統的頻譜效率,考慮了基站最大發射功率約束與用戶分組約束,構建了基于多用戶和速率最大化的用戶分組與功率分配聯合優化問題。該問題是混合整數非線性規劃問題,故難以求其閉式解。
3)為了解決上述問題,提出了兩步策略。首先,基于圖論中的最大割定理,進行用戶分組,保證用戶與無人機的相對距離較小。然后,對每組用戶分別執行基于多用戶和速率最大化的功率分配子問題,通過輔助變量法將其轉換為凸優化問題,從而得到每組用戶的功率分配因子。
4)仿真結果表明,本文算法在不同的覆蓋半徑、無人機高度、發射功率和信噪比下具有較好的和速率性能。
2 系統模型及問題描述
考慮一個下行UAV-NOMA系統,如圖1所示。該系統包括一個含Nt根發射天線的UAV作為空中基站,工作在固定高度,且地面覆蓋范圍是半徑為R的圓。此外,該系統具有N個單天線地面用戶。假設N個用戶被分為T組,每組有K個用戶,并記第t組的第k個用戶為,定義組號集合為t∈{1,2,…,T},用戶序號集合為n∈{1,2,…,N},組內用戶序號集合為k∈{1,2,…,K}。所有組的用戶1均勻分布在半徑為R1的小圓內,而所有組的用戶i均勻分布在半徑為Ri-1和Ri的同心圓環內。其中,Ri-1<Ri,且RK=R,同時定義用戶覆蓋半徑集合為。此外,組內用戶利用NOMA技術共享相同的時頻域資源,而各組之間保持正交多址接入(OMA,orthogonal multiple access),即忽略組間干擾[21]。

圖1 基于無人機的非正交多址接入系統模型

為了提升UAV-NOMA系統頻譜效率和傳輸質量,考慮基于系統和速率最大的用戶分組與功率分配聯合優化問題,該優化問題可以表示為

其中,C1表示基站最大功率約束,C2表示用戶功率分子因子約束,C3表示一個用戶至多分到一個組,C4表示每組用戶數約束,=1表示用戶i屬于第t組,表示用戶i不屬于第t組[22]。
顯然,上述問題是混合整數非線性規劃問題,故難以求解。為了使和速率達到最大化,需要窮舉搜索才能得到全局最優的用戶分組方案,而搜索次數高達次[23]。當用戶數很多時,該方式不合理。
為此,提出一種兩步策略來減少復雜度。首先,執行用戶分組算法。然后,對每組用戶執行功率分配算法來得到次優解。
3 基于最大割定理的用戶分組算法
本節將基于圖論中的最大割定理提出低復雜度的用戶分組算法。傳統的用戶分組方案通常只考慮用戶的信道條件,將信道條件最好的分到一組[24],或將信道差異最大的分到一組[22]。但是,上述方案都只考慮瑞利信道的影響。在復合信道模型下,UAV-NOMA系統會受到Nakagami-m衰落信道的影響。因此,傳統的方案也許不適于無人機場景。
此外,資源分配可等價為圖論問題。文獻[25]將車聯網領域中的配對問題轉化成圖論中的最大割問題,將用戶間干擾最小的用戶分為一組,從而保證車輛連接的可靠性。文獻[26]將用戶分組問題轉換成圖論中的尋找負價環問題來滿足最小功率需求。然而,在UAV-NOMA系統中,用戶與UAV的距離會影響系統性能。雖然假設用戶與UAV的位置固定不變,但是可通過圖論中的最大割定理來減少組內用戶到UAV的相對距離,從而改善組內用戶的信道狀況。
假設分組前N個用戶具有個初始組,并且每個初始組包含個用戶。此外,需要滿足式(7)和式(8)中的約束條件C3和C4。UAV-NOMA系統中用戶與UAV的相對距離關系可表示為無向圖,如圖2所示。其中,一個節點表示一個用戶,每2個節點間由一條邊相連。邊的權值為即UAV與用戶a和用戶b的距離之和。在滿足分組約束的條件下,保證組內用戶與UAV的總距離最近。這是因為用戶距離UAV越近,則信道狀況越好。
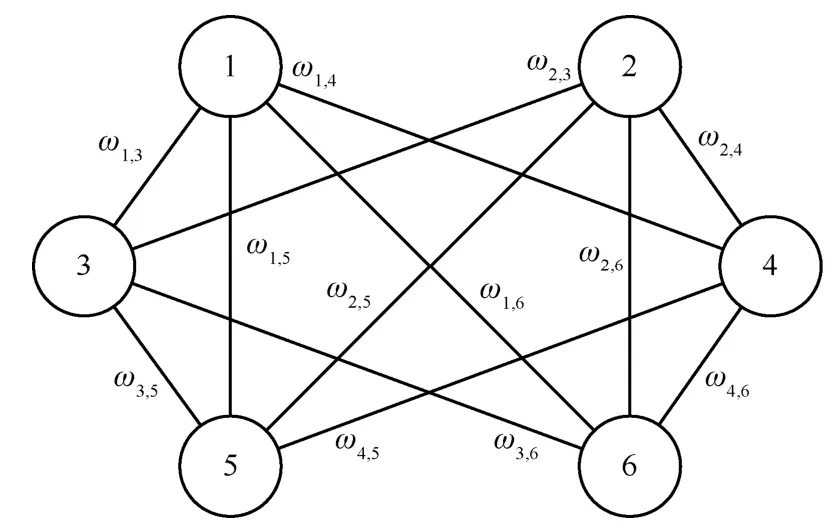
圖2 用戶與UAV的相對距離關系
圖2中優化用戶與UAV的相對距離等價于圖論中的最大割問題。已知圖G=(V,E),其中,V表示地面所有用戶的集合,Vi表示第i個初始組的用戶集合;E表示邊集合,表示每次可被選擇的邊集合,表示K的補集,并且當i=1時,否則,
對于無向圖,分組后所有用戶被分到T個組,因此顯然,而分組后每組用戶數。此外,根據所有已選邊與未選邊之和為邊集E,可以得到

下面,證明利用K維相對距離來實現最大割的可行性,有命題1成立。
命題1如果需要完成K個用戶分組,并且所有用戶則可以通過計算ωK,而不是判斷來自所有組合邊的權值之和來確保K個用戶與UAV的相對距離最小。
證明對于任意的組內用戶數K與組數T,已知每個用戶均來自用戶集合V,則有
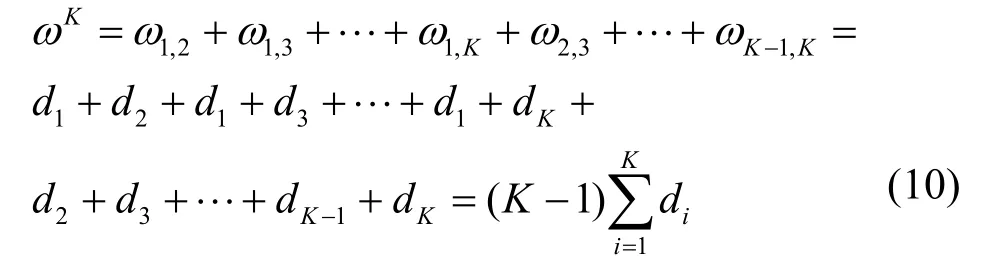
證畢。
本文所提基于最大割定理的用戶分組算法如算法1所示。

4 基于和速率最大化的功率分配算法
本節研究的功率分配算法是基于第2節中定義的信道增益排序假設。不失一般性,定義第3節的分組結果為t*。基于該結果,式(4)問題可以等價為如下功率分配子問題

其中,約束條件為每組用戶的總功率分配因子約束。
雖然該約束條件是凸條件,但是目標函數分子分母存在耦合項,不易求解。利用輔助變量法[27]定義非負輔助變量,可以將目標函數縮放成
其中,C5與式(11)相同,C6為輔助變量上界。
由于目標函數和約束條件是正項式,因此式(13)是幾何規劃問題。因此,通過改變變量,分別可轉化為。約束條件C2可轉換為
其中,約束條件C7為凸條件。至此,可以求得次優功率分配因子[28]。
5 仿真結果
本節將通過仿真驗證本文算法的有效性。當Nakagami-m衰落信道參數m>1時,表示LoS鏈路。不失一般性,假設m=2,路徑損耗參數α=3,且每組總發射功率P=1W。此外,假設UAV的發射天線數為4。為了方便地分析問題,定義如下幾類算法:本文算法,即聯合本文所提的用戶分組算法和功率分配算法;算法1,即聯合最強近用戶與最強遠用戶(BNBF,best-near best-far)分組算法[24]和固定功率分配算法[21];算法2,即聯合最強近用戶與最弱遠用戶(BNWF,best-near worst-far)分組算法[22]和固定功率分配算法[21],其中,地面用戶的功率分配因子固定為分別對應兩用戶、三用戶、四用戶和五用戶的情形;算法3,即聯合BNBF用戶分組算法[24]與基于最小速率需求的功率分配算法[29]。
圖3對比了不同覆蓋半徑下兩用戶正交與非正交UAV系統和速率性能。其中,非正交UAV系統應用本文算法。此外,假設R1=0.5km、H=0.5km、SNR=5dB。由圖3可知,與OMA方案相比,無人機在NOMA方案下具有更好的和速率性能。顯然,隨著組數T增大,非正交UAV系統的性能優勢更明顯。這表明應用本文算法的非正交UAV系統在用戶數較多時仍具有較好的頻譜效率。
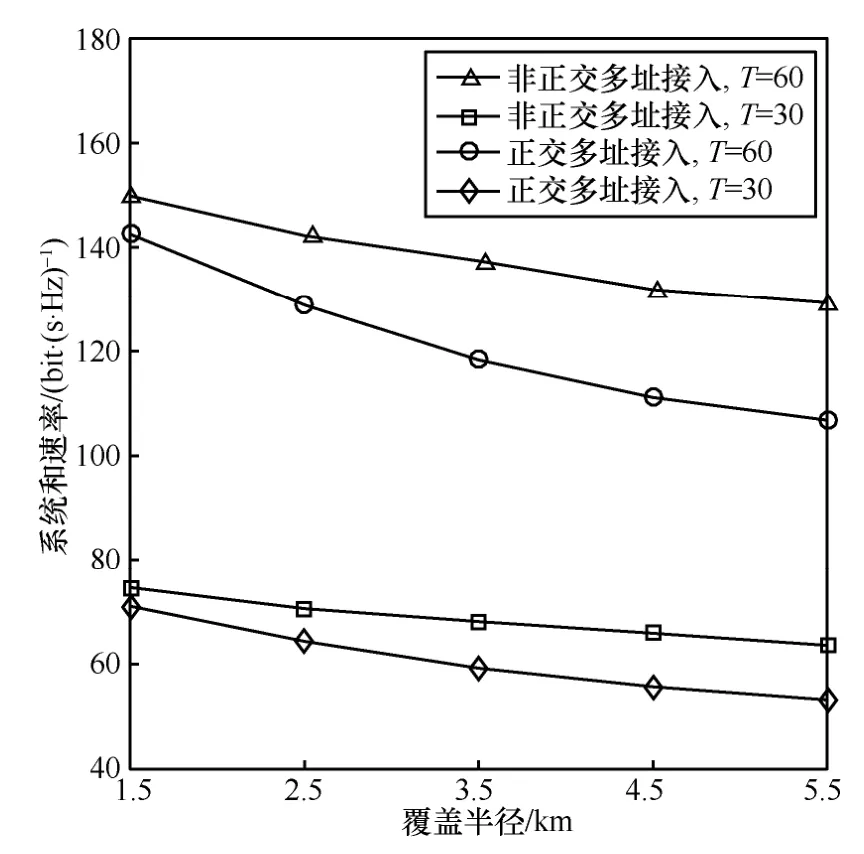
圖3 不同覆蓋半徑下兩用戶正交與非正交UAV系統和速率性能
圖4給出了不同高度下兩用戶非正交UAV系統和速率性能。其中,R1=0.5 km、R2=1.5 km、T=10、SNR=5 dB。由圖4可知,與其他動態算法相比,應用本文算法的UAV-NOMA系統具有更好的和速率性能。這表明本文算法的有效性,從而保證UAV-NOMA系統的工作高度更具靈活性。

圖4 不同高度下兩用戶非正交UAV系統和速率性能
圖5對比了不同功率下兩用戶非正交UAV系統和速率性能。其中,假設R1=0.5 km、R2=3 km、H=1 km、T=10、SNR=5 dB。顯然,隨著總發射功率的增加,UAV-NOMA系統和速率也增加。其中,本文算法具有最優的和速率性能。因此,對比動態BNBF、BNWF算法、基于最小速率需求的功率分配算法,本文算法使UAV-NOMA系統的頻譜效率得到較好提升。

圖5 不同功率下兩用戶非正交UAV系統和速率性能
圖6給出了不同信噪比下兩用戶非正交UAV系統和速率性能。其中,R1=0.5km、R2=3km、H=1km、T=10、SNR=5dB。由圖6可知,本文算法具有最優的和速率性能。對比傳統的動態用戶分組算法[22,24]與功率分配算法[5,29],本文算法與基于和速率最大化的功率分配算法更適于Nakagami-m衰落信道下的兩用戶UAV-NOMA系統。

圖6 不同信噪比下兩用戶非正交UAV系統和速率性能
圖7對比了不同信噪比下三用戶非正交UAV系統和速率性能。其中,R1=0.5 km、R2=1 km、R3=3 km、H=1 km、T=10、SNR=5 dB。由圖7可知,本文算法在三用戶場景下也具有相對最優的和速率性能。
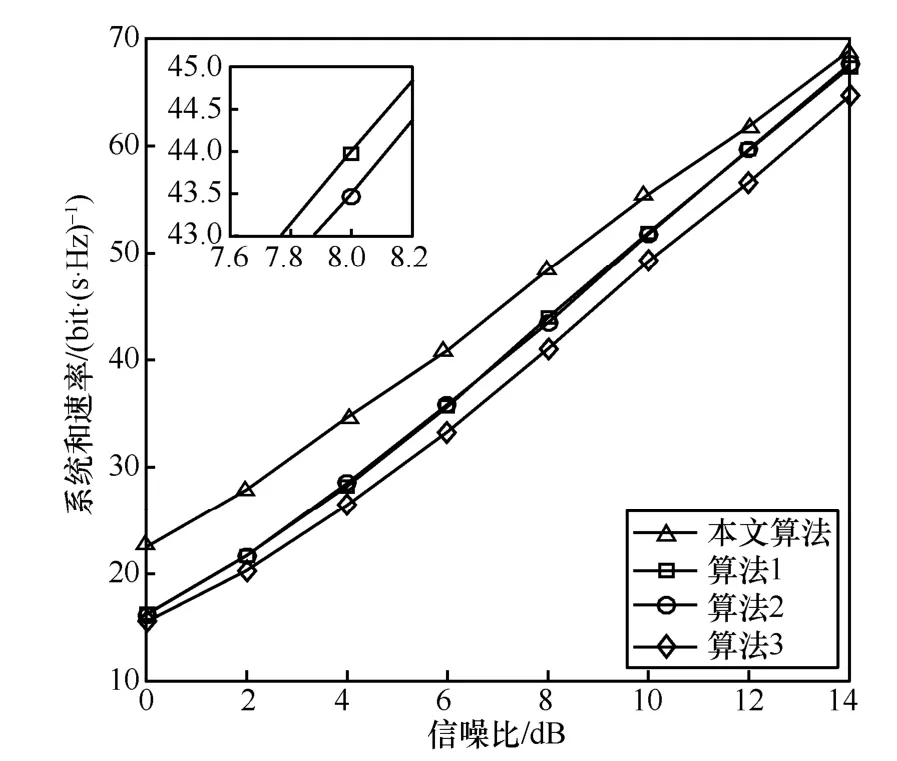
圖7 不同信噪比下三用戶非正交UAV系統和速率性能
圖8給出了不同信噪比下四用戶和五用戶非正交UAV系統和速率性能比較。其中,=[0.5,1.5,2.5,3]和=[0.5,1,1.5,2,3]分別代表四用戶和五用戶UAV-NOMA系統中各用戶的覆蓋半徑。此外,H=1 km、T=10、SNR=5 dB。顯然,在相同的組內用戶數K下,本文算法具有更優的和速率性能。另外,五用戶系統和速率性能比四用戶系統和速率性能更好,這表明本文算法比其他傳統算法更適用于用戶數較多的情形。

圖8 不同信噪比下四用戶和五用戶非正交UAV系統和速率性能
6 結束語
本文研究了基于無人機輔助的NOMA網絡的聯合用戶分組與功率分配算法,從而進一步提升了無人機系統的頻譜利用率。本文算法能夠動態地進行用戶分組,并且得到每組用戶的功率分配因子。仿真結果表明,對比正交UAV系統,應用本文算法的非正交UAV系統在不同覆蓋半徑條件下具備更好的系統和速率性能。此外,針對不同UAV高度、不同發射功率、不同信噪比等情形,非正交UAV系統在應用本文算法時都具備較好的和速率性能。同時,對比隨機用戶分組,動態BNBF、BNWF用戶分組,以及固定功率分配、最小速率需求功率分配算法,本文所提的基于最大割定理的用戶分組算法與基于和速率最大化的功率分配算法具有更好的穩健性,從而有效地提升了Nakagami-m衰落信道下的UAV-NOMA系統的頻譜效率。后續工作將重點考慮組間干擾與不完備信道狀態信息的影響,同時設計上行多小區多組場景下旋轉無人機輔助的NOMA網絡啟發式功率分配算法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
