基于目標回波特征信息的改進型概率數據互聯算法
2020-10-13 13:27:08黨騰飛高一棟
火控雷達技術 2020年3期
黨騰飛 牟 聰 高一棟
(西安電子工程研究所 西安 710100)
0 引言
雷達數據處理的主要是對雷達信號處理后的一次點跡進行預濾波、凝聚、起航、互聯跟蹤及航跡庫管理等。此過程抑制測量過程中引入的隨機誤差,對控制區域內的目標運動軌跡和相關參數(如速度和加速度等)進行估計,預測下一時刻的位置,形成穩定航跡,對目標實時跟蹤[1]。
航跡的維持跟蹤是在航跡起始后,形成穩定航跡的階段。此階段的跟蹤算法,主要分為極大似然貝葉斯類和多目標數據互聯算法兩大類。其中貝葉斯類算法主要有最近鄰域算法(NNSF)、概率數據互聯算法(PDA)和聯合概率數據關聯算法(JPDA)[2-3]。NNSF算法簡單,但是不適用于雜波較多的環境;PDA算法將跟蹤波門中可能的雜波和目標回波加權作為等效回波,但是PDA中量測的條件概率計算過于繁瑣,其假設波門中的虛假量測個數服從泊松分布,如果該參數估計不準,濾波誤差將很大。JPDA算法中互聯矩陣和互聯概率的計算也比較復雜,計算量也是工程應用必須考慮的問題。另外,貝葉斯類互聯算法主要利用目標的位置、多普勒速度等信息,但是隨著雷達分辨率的提高,雷達回波信息中也含有目標的一些特征信息[4-5]。本文正是將目標的這些特征信息用于跟蹤算法,以改善跟蹤性能。
1 雷達目標識別
雷達回波特征提取與識別本質上來說就是目標識別。目標識別技術一般分為數據獲取、預處理、特征提取和分類決策幾部分。回波的特征提取與識別有一維波形信息和二維圖像信息的提取[6]。本文將這些特征信息用于航跡跟蹤。
假設信號處理階段,根據目標回波提取了n個特征,其中一個特征為αj。如果k-1和k時刻,兩次回波的特征αj滿足一定條件,則認為兩次回波此特征匹配,當n個特征達到匹配條件,則認為兩次回波來源于同一類(或同一個)目標。
2 PDA算法分析
PDA算法依據的假設是:
1)航跡已經起始;
2)每一時刻的所有量測至多有一個真實量測,此事件發生的概率為PD;
3)正確量測服從高斯分布;
4)虛假量測服從均勻分布,虛假量測數服從泊松分布。
PDA算法的狀態更新方程和更新狀態估計對應的誤差協方差為

(1)
其中K(k)為濾波增益,ν(k) 為組合信息。式(1)中每個量測的關聯概率為βi(k)(β0(k)表示波門中沒有目標回波的概率)。
(2)
式(2)中b和ei(k)分別為

(3)

(4)
其中S(k)為信息協方差,PD為目標檢測概率,PG為門概率。PDA算法認為跟蹤門中的每個量測都可能來自目標,只是概率不同。由式(1)到式(4)可以看出,關聯概率βi(k)與ei(k)成正比(和νi(k)成反比),也就是說當量測偏離航跡預測中心越遠,其概率越小。另外,跟蹤波門的大小是信息協方差S(k)的倍數,可以看出βi(k)與S(k)成反比,也就是說殘差越大,量測和預測中心距離一定的情況下,量測來自目標的概率會降低。一般跟蹤算法中,波門大小確定,利用PDA算法中量測距離預測點距離越遠,來自目標的概率越低的思想,可以簡化PDA算法。
3 方法設計
3.1 跟蹤波門設計

(i=1...n)
(5)
時,量測Y(k)為候選量測。式(5)中KG為波門常數,

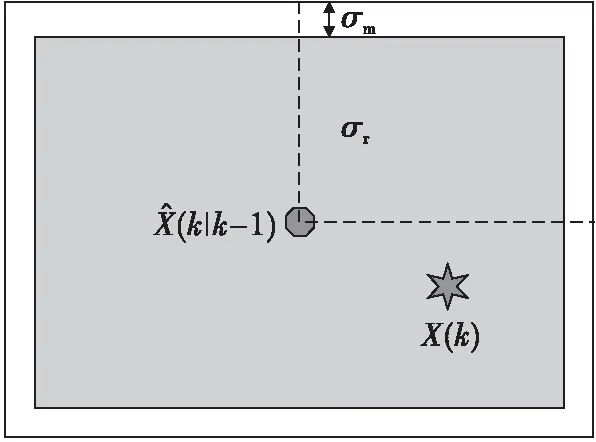
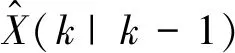
圖1 矩形波門
圖1中陰影部分以外的矩形圈是機動波門,當目標落入外層矩形圈,則認為目標發生機動。根據實際情況,性能優越的跑車即便發生機動,百公里加速最快2.5 s,機動波門寬度σm約為6 m,因此算法設計中機動波門可以小于此值。
3.2 改進的PDA算法設計
設波門關聯門限為γ=KGσr,當目標i落入跟蹤波門時,即
(6)
由以上分析可知,波門大小確定, PDA算法中量測距離預測點距離越遠,來自目標的概率ρi(k)越低。因此令
(7)
考慮到完備性,最終量測i的概率為
(8)
將式(8)帶入式(1),可得k時刻目標估計值。
3.3 回波特征信息的提取
回波特征信息包括一維波形信息和二維圖像信息。一維信息中單一回波特征量包括回波寬度、回波圍成的面積、編碼熵、分形維和小波分解等[7-8]。
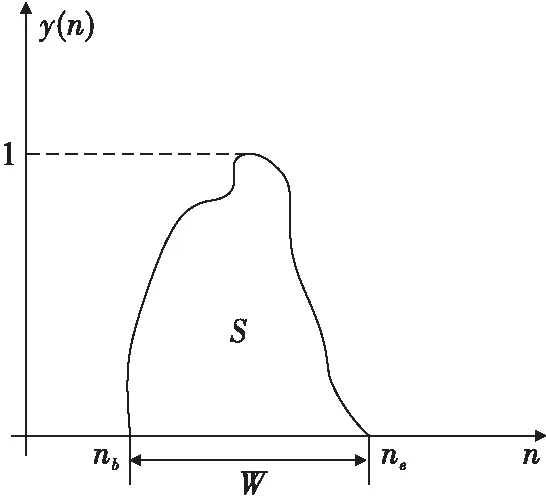
圖2 回波特征定義
如圖2所示,回波寬度如式(9),其一定程度反應了目標的大小信息。
W=ne-nb
(9)
本文僅利用回波寬度作為目標的回波特征信息,用于目標發生機動時的航跡更新。設目標k-1和k時刻的回波寬度為W(k-1)和W(k),當滿足
(10)
時,認為前后兩時刻目標回波寬度匹配。ψ為回波寬度變化門限,此值可根據經驗設定。此值若為30%,表示當前時刻目標回波寬度相對于前一時刻變化了30%,小于此值,認為前后兩時刻目標匹配。
3.4 算法設計
本算法對量測濾波分兩步:
1)當量測落入跟蹤波門(圖1陰影)時,用3.2節中的改進的PDA算法對量測濾波估計。
2)當量測落到跟蹤波門以外但是在機動波門內時,認為目標發生機動,此時用3.3節中方法對目標前后兩時刻匹配,若匹配上,利用匹配上的量測值更新航跡。如果有多個量測值滿足3.3中的匹配條件,用最近鄰法航跡更新。
4 仿真實驗
共進行200幀目標跟蹤仿真,量測誤差x和y方向都是5 m。目標從(x,y) =(100,200)處以x方向2 m/s,y方向20 m/s勻速運動,120幀時x方向加速度2 m/s2運動5幀,然后勻速運動。如圖3所示,從跟蹤效果看,傳統PDA算法在122幀時目標丟失斷航。在PDA算法和改進算法跟蹤的122幀里,兩者跟蹤精度分別是3.48 m和3.63 m,本文算法相比PDA算法精度略差,但是本文算法能夠應對目標機動情況,算法適應性更強,適合工程應用。
圖3 跟蹤軌跡對比
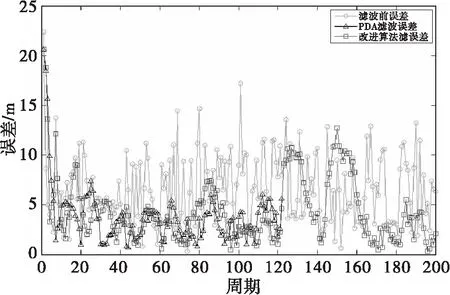
圖4 跟蹤誤差對比
5 結束語
本文簡化了PDA算法,常規跟蹤波門基礎上添加機動波門,將目標回波特征信息用于航跡濾波更新。但是PDA算法本身僅僅考慮了單目標跟蹤,沒有考慮多目標跟蹤時波門交錯,一個波門中可能有兩個以上的目標回波的情形。基于目標特征信息的目標識別技術近年來發展迅速,如果能將更多的回波特征信息用于目標跟蹤,本算法便能更加完善。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年23期)2014-02-27 14:19:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
