上肢康復外骨骼機器人控制方法進展研究
2020-10-15 01:50:20陳文遠王文學
電子科技大學學報 2020年5期
劉 冰,李 寧,于 鵬,楊 鐵,陳文遠,楊 洋,王文學,姚 辰
(1. 沈陽建筑大學信息與控制工程學院 沈陽 110168;2. 中國科學院沈陽自動化研究所機器人學國家重點實驗室 沈陽 110016;3. 中國科學院機器人與智能制造創新研究院 沈陽 110169;4. 中國科學院大學計算機科學與技術學院 北京 懷柔區 100049)
研究表明,腦卒中已成為全球第二大致死病因,成人第一大致殘病因。其中,近80%的腦卒中存活者會發生不同程度的肢體功能運動障礙,導致生活不能自理,嚴重影響人們的日常生活活動能力以及生活質量[1-4]。腦卒中后及時有效的康復訓練有助于患者運動功能恢復以及腦功能重塑[5]。傳統的康復治療手段主要是通過康復治療師手動或采用一些簡單的儀器設備對患者進行一對一的康復訓練。在康復治療師數量、康復效率及醫療成本等方面均無法滿足患者治療需求。機器人系統具有特有的優勢,可以克服康復治療師緊缺以及人工康復耗時、昂貴的問題限制[6],因此,機器人輔助康復非常適用于康復訓練并得到越來越廣泛的研究[7]。自20 世紀90 年代末以來,就已經出現了大量有關中風后康復的機器人設備[8]。通過采用符合康復要求的輔助策略,來提供長期高強度的治療性訓練。截至目前,在這些機器人系統中,與人類手臂解剖結構相似并與患肢并行工作的上肢康復外骨骼機器人系統引起了廣泛的研究興趣[9]。
在眾多上肢康復外骨骼機器人的研究中,控制策略是其中的核心技術,其科學性與人機融合性影響著康復效果。受患者康復治療時間線的啟發,定義了兩類控制策略:一類是由于患者自身無法運動,需要機器人起引導運動作用的被動控制策略;一類是患者自身具有一定運動能力,由機器人起跟隨運動作用的主動控制策略。康復治療的過程可以分為三個時期:軟癱期、痙攣期以及恢復期。針對不同患病階段的患者,需要設計與其需求相對應的控制策略。當患者處于軟癱期時,肌肉張力消失或者不足,自身難以提供力量完成康復運動;當處于痙攣期時,肌肉張力有所恢復,但狀態不穩定容易痙攣多發;當處于恢復期時,肌肉力量逐漸恢復,患者具有了一定的運動能力。因此,被動控制策略可以在康復治療的全過程發揮作用,主動控制策略則更加適用于康復治療過程中的恢復期。由此可見,相較于傳統機器人來說,上肢康復外骨骼機器人的控制增加了一定的復雜性,應用不同的控制策略將直接影響到控制系統的性能指標及康復效果。上肢康復外骨骼機器人系統的控制適應性、魯棒性、準確性與柔順性影響著輔助康復效果。所以,開發更高效的控制策略以輔助患者恢復運動能力將是當前外骨骼機器人系統發展的主要方向[10-11]。
本文從被動控制以及主動控制兩方面綜述了上肢康復外骨骼機器人的研究進展。闡述了不同控制方法應用于上肢康復外骨骼機器人中的情況,詳細介紹了它們的特點與研究現狀。此外,本文還提出了目前發展中潛在的應用與可能面臨的挑戰,最后對未來應用于上肢康復外骨骼機器人的控制方法進行展望。
1 被動控制
被動控制策略適用于康復治療的全過程,尤其在軟癱期與痙攣期發揮重要作用。在這兩個時期,康復訓練的主要目標是提高肌肉張力,誘發患肢的主動運動能力并消除可能由于痙攣產生的對人體的傷害。針對這些目標,提出了多種控制方法,盡管存在混合使用的情況,但主要可以概括為PID 控制、滑模控制、模糊控制、肌電信號控制等。
1.1 PID 控制
在對患者進行被動訓練時,最常用的方法就是PID 控制。因為上肢康復外骨骼機器人的模型復雜并難以獲得,而PID 控制具有動態特性可調、不依賴于被控對象的模型的特點,通過該方法調整系統參數可以獲得滿意的控制效果。文獻[12]采用線性PID 控制方法通過上肢外骨骼主手對MARSE-4外骨骼機器人進行遙操作,規定其沿預定軌跡運動。驗證實驗表明,MARSE-4 能有效跟蹤期望軌跡并對患者的腕部、肘部及前臂的運動進行被動治療,達到滿意的訓練效果。文獻[13]提出了一種不需要系統動力學模型來設計的PID 控制器,保證了機器人的漸近穩定性。利用EXO-UL7這一外骨骼系統的控制器參數的理論結果,對系統性能進行了仿真評估,驗證了系統的半全局漸近穩定性。
為了實現良好的控制性能,對于上肢康復外骨骼機器人控制方法的選擇,學者們更偏好于將經典PID 控制方法與其他方法相結合。基于此,文獻[14]將PID 控制與神經補償結合使用,減小了系統誤差并提高了系統適應性。文獻[15]提出了基于神經網絡的全局PID 滑模控制方法,用于有界不確定性機器人的跟蹤控制,給出了控制系統穩定性和收斂性的數學證明。仿真結果表明,該方法消除了抖振和穩態誤差,實現了滿意的軌跡跟蹤。由此可見,多種控制方法的混合使用相對于單獨使用傳統的PID 控制方法性能優越。
1.2 滑模控制
滑模控制屬于非線性控制方法,憑借響應快速、魯棒性強等優點被廣泛使用。與PID 控制方法不同,滑模控制可以在動態過程中,按系統當前狀態有目的地發生變化,迫使系統按照預定滑動模態的狀態軌跡運動。滑模控制的發展是以滑動模態的選擇為基礎,從只能實現漸近穩定的線性超平面的傳統滑模控制到終端滑模控制,再到非奇異終端滑模控制,如今到快速終端滑模控制。滑模控制不斷發展,控制性能也愈加優越。
文獻[16]設計出一種模塊化控制體系,采用快速終端滑模方法驅動外骨骼執行康復任務。在該控制器中,假設除了與某些參數有界性有關的經典屬性外,所有模型函數都是未知的。同時,擾動也被認為是有界的。這允許了位置和速度在有限時間收斂到期望的軌跡。該控制器已經應用于實時驅動具有三自由度的上肢外骨骼。經實驗驗證,證明了該控制器的有效性和魯棒性。
面對非線性系統中未知但有界的動態不確定性以及受測人體動力學模型未知等問題,文獻[17]提出了魯棒自適應積分終端滑模控制方法對三自由度上肢外骨骼進行控制,實現患者的被動康復運動。利用積分終端滑動模態曲面,使滑模跟蹤誤差在有限時間內收斂到零。該滑模控制系統的設計保證了滑模的可達性和有限時間內良好的跟蹤性能。該控制方案在不增加任何約束的情況下消除了奇異性問題。并以一名健康的受試者為實驗對象,使用外骨骼來執行與被動手臂運動相對應的軌跡。結果表明,該控制方法能有效地用于康復目的,控制力矩在實際應用中是便于獲得和實現的。
文獻[18]針對機器人系統出現的由于建模不確定性以及受到未知擾動的問題,設計了基于有限時間擾動觀測器的非奇異快速終端滑模控制的五自由度上肢康復外骨骼。通過有限時間擾動觀測器估計未知擾動同時進行補償,該觀測器可在小于0.05 s的時間內估計出擾動且誤差為零。相較于此前諸多其他傳統方案大大提高了快速性。通過準確的擾動估計,使用滑模控制來跟蹤要求的關節角度,減輕了抖振效應,可以使外骨骼的角度跟蹤誤差在有限的時間內快速降到零,保證了收斂精度。值得注意的是,系統的初始狀態會影響有限時間收斂,從而導致實際應用會有局限性。在固定時間控制方法中,解析時間則不受初始狀態的影響。因此,固定時間滑模控制將會是下一步需要關注的研究方向。
1.3 模糊控制
模糊控制是具有邏輯推理的一種控制方法,適用于對難以建模的系統進行魯棒控制,并且其控制形式簡單、易于實現,屬于“白箱”控制。在滑模控制方法中,最主要的缺點之一就是易產生抖振現象,為了解決這一問題,引入了模糊控制與滑模控制相結合。文獻[19]提出了一種基于PID 滑模面以及模糊控制律的改進模糊滑模控制方法,保證了系統的魯棒性和最優位置控制性能。文獻[20]設計出一種七自由度上肢康復外骨骼機器人,采用了模糊控制與滑模控制結合的控制策略,既對外界的干擾和未知的動力學模型有很強的魯棒性,又消除抖振現象提高了控制性能。
文獻[21]在未知外界干擾、未知輸入飽和、未知動力學建模的情況下,利用模糊近似設計了擾動觀測器來補償未知輸入飽和、模糊近似誤差引起的擾動力矩。自適應模糊控制采用更新的參數機制和額外的扭矩輸入,利用干擾觀測器通過前饋環施加到機器人外骨骼來抵消干擾。通過這種方法,系統不需要任何內置的扭矩傳感器。利用狀態反饋和輸出反饋控制對上肢外骨骼進行了大量的實驗,驗證了所提方法的性能。
1.4 肌電信號控制
人體肌電信號包含了大量的人體運動信息,可以直接反映出神經肌肉的活動情況。因此,被廣泛應用于上肢康復外骨骼機器人。將肌電信號作為機器人控制源,是一種有前景的控制手段。對于上肢康復外骨骼機器人這類輔助設備來說,能夠從用戶的肌電信號中檢測出人類的運動意圖,分析出運動軌跡并觸發控制是至關重要的[22-23]。
文獻[24]為了能夠實時控制外骨骼,開發出腦電圖和肌電圖信號混合的系統,提出了采用肌電信號估計關節角度的新方法。該方法基于神經科學研究中的肌肉骨骼系統的數學模型,建立出肌電信號與關節角度的公式關系,實現了基于肌電信號實時控制。研究采用了一個六自由度的外骨骼輔助整個手臂和手指運動,可用于實際康復和日常活動支持。4 名身體健全的受試者和一名上肢脊髓損傷的患者佩戴了該外骨骼進行運動控制,完成搬運和釋放一個球的手部和手臂的運動。
同樣想要通過肌電信號來估計關節角度,文獻[25]采用了具有三自由度的上肢外骨骼,利用BP 神經網絡把采集到的肌電信號提取特征后作為輸入,輸出相應的肘關節角度建立出了肘關節角度與肌電信號特征之間的關系模型。肌電信號對外骨骼的控制是為了估計關節角度,從而實現上肢的運動估計,提高了運動預測的準確性。4 名受試者參與實驗,驗證了控制系統的性能達到期望。但是系統在可靠準確采集肌電信號方面仍然存在挑戰,實驗中傳感器的放置位置、人體表皮的處理情況等都會影響信號采集結果。
針對上述信號采集過程可能出現的問題,文獻[26]提出將肌電信號視為觀察變量,由觀察結果估計用戶的預期運動,建立一個用于肌電輔助機器人控制和生物信號傳感器故障檢測的人體運動模型。將該模型應用于一個四自由度的上肢外骨骼機器人,通過對5 個健康受試者的關節運動實驗表明,受試者都能成功控制機器人,并且在傳感器失效的情況下也完成了適當的控制。這一新方法的提出解決了傳統的肌電信號采集時人體與傳感器接觸面易分離,電極易錯位等異常問題,為以后肌電信號輔助機器人控制提供了新思路。
此外,肌電信號控制在康復治療中的應用形式愈加豐富。為使控制過程更靈活,交互性更好,文獻[27]提出了基于自適應肌電信號的外骨骼控制器,該控制器可以生成個性化的肌電信號特征分類器,實現預期控制。該系統對肌電信號傳感器的放置具有較強的魯棒性,同時對真皮下肌肉移位也具有較強的魯棒性。實驗采用一個拇指外骨骼完成了一項放書任務,并對18 名受試者進行了驗證。通過在壓力觸發前約0.2~0.3 s 預測用戶的動作,可以及時移動用戶的拇指。結果表明,通過機器學習實現個性化的基于肌電信號的外骨骼控制是可能的。
2 主動控制
當患者處于恢復期時,肢體肌肉力量增強,能夠具有一定的運動能力。在這一時期要求上肢康復外骨骼機器人由初期的引導運動過渡到跟隨運動,可以采用主動控制策略進行控制,包括阻抗/導納控制、自適應控制、協調控制、智能控制等。
2.1 阻抗/導納控制
阻抗控制自Hogan 提出以來[28],經過不斷的研究發展,如今已經成為機器人領域的經典控制方法。阻抗控制可分為基于力的阻抗控制和基于位置的阻抗控制即導納控制,且兩者對偶。阻抗控制通過分析機器人末端與環境之間的動態關系將力控制與位置控制綜合考慮起來,用相同的策略實現力控制和位置控制[29-32]。
文獻[33]提出了一種利用生物信號對上肢康復外骨骼機器人進行自適應阻抗控制的方法。該方法通過建立人體上肢的參考骨骼肌肉模型,并進行實驗校準,以匹配操作者的運動行為。采用阻抗算法通過肌電信號傳輸人體剛度,設計出最優的參考阻抗模型。除此之外,文獻[34]針對所研制的外骨骼機器人,提出了一種自適應導納控制框架來處理人體的運動意圖以及機器人動力學模型未知的問題。該框架由雙控制回路構成。利用內環以反饋的方式處理機器人動力學的未知質量和慣性矩,利用外環考慮人體運動意圖來調整交互模型,利用自適應技術對內環中的未知動態進行處理,保證了外環執行任務的效果。實驗表明,該導納控制方法在人與機器人的物理交互任務中具有較好的控制性能,能夠有效地實現人體對外骨骼機器人的導納控制。
文獻[35]設計了一個七自由度的上肢康復外骨骼機器人,為了實現被動訓練與主動訓練模式的自由切換,選用了基于模糊滑模導納控制的控制策略。由導納控制建立出患者和外骨骼之間的交互力以及康復訓練軌跡調節量之間的動態關系。通過調整導納參數,調節患者的訓練過程,增強了人機交互的柔順性,提高了患者治療的參與程度。而另一組設計開發出一種新的上肢外骨骼患者協作控制框架,提出一種基于最小介入的導納控制策略,來引導患者積極參與,并在訓練中最大限度地利用恢復的運動功能。所開發的控制方法可以基于患者的運動能力轉化為三種不同的控制模式,即人導模式、機器人輔助模式和運動受限模式,根據患者的運動意圖調節不同工作區域的人機交互[36]。
2.2 自適應控制
在上肢康復外骨骼機器人的控制任務中,會出現被控系統具有參數不確定或參數未知變化等問題。自適應控制方法可以通過參數在線校正或估計解決這類問題。文獻[37]考慮到動力學建模未知以及環境干擾等問題。在給定前臂位置期望軌跡的情況下,利用自適應模糊逼近器估計人與機器人系統的動態不確定性,并利用迭代學習方法對未知時變周期擾動進行補償。該控制器不需要精確的外骨骼模型,在未知動力學模型的情況下,進行了3 組對比實驗。結果表明,使用所提出的控制器跟蹤誤差可以收斂得越來越小,而這一良好性能主要是由于“自適應”機制,驗證了該控制方案的有效性。
文獻[38]研究了具有五自由度的上肢康復外骨骼機器人,該機器人受到不確定動力學、干擾力矩、不可全狀態測量和不同類型的驅動故障的影響。因此,提出了一種基于滑模控制策略的自適應非線性控制方案。方案將高增益狀態觀測器與動態高增益矩陣相結合,將模糊神經網絡分別用于狀態向量和非線性動態估計。利用動態參數,為同時處理模糊神經網絡逼近誤差、擾動力矩和驅動故障的影響提供了一種有效的方法。仿真表明,采用這一方法可以獲得較低振幅的無抖振力矩,且具有響應快、跟蹤精度高等優點。在接下來的研究中,將是對基于觀測器的自適應容錯控制器進行設計。
文獻[39]提出了一種基于肌電信號的神經模糊外骨骼控制器的有效自適應控制。該控制過程分為3 個階段,分別是輸入信號選擇階段、姿態區域選擇階段、神經模糊控制階段。當外骨骼的使用者發生改變時,外骨骼的控制器必須使用所提出的適應策略來適應新使用者的物理和生理條件。控制器自適應采用用戶指示其運動意圖的運動指示器。該指示器可以有效地指示關節的各項運動和肘關節、肩關節的協同運動。同時,肌肉活動水平也在外骨骼的適應階段根據用戶的情況或康復階段進行調整。通過實驗驗證了該自適應方法的科學有效性。
為了確保在參數不確定性和環境干擾下軌跡跟蹤的準確性,文獻[40]提出一種基于徑向基函數網絡的神經模糊自適應控制方案。通過李亞普諾夫穩定性理論,證明了該方案的穩定性。通過對一名健康受試者與兩名腦卒中患者進行位置跟蹤實驗和頻響實驗表明,這一方法的提出比較級聯PID 控制器和模糊滑模控制器的控制性能,能夠獲得較低的位置跟蹤誤差和較好的頻響特性。
文獻[41]研究了輸入飽和狀態下上肢外骨骼的控制設計,提出了利用神經網絡來近似不確定的機器人動力學的自適應控制器。采用輔助系統來處理輸入飽和的影響,使用狀態反饋和輸出反饋從測量的反饋誤差在線估計不確定性,代替了基于模型的控制。通過干擾觀測器,在線抑制未知干擾,實現了軌跡跟蹤。通過實驗研究,證明了該方法的有效性。然而,實驗中也顯示出這些控制器在飽和較小時使用的局限性,所以在線學習控制方案有望在不久的將來被開發出來用以優化控制性能。
2.3 協調控制
隨著康復訓練不斷深入,患者需要外骨骼機器人提供的幫助會越來越少。為了響應被控對象性能隨時間變化,提高人機交互的水平,提出了協調控制方法。
對于外骨骼機器人的協調研究,是為了增強機器人的行為能力,解決其運動控制方面的問題。考慮到患者恢復過程運動能力不斷增強,其主觀運動意圖明顯,這時要求控制方法的目的是調節運動過程中的協調效應,即控制各關節位置或相對于其他關節的速度,以保證上肢康復外骨骼機器人能夠柔順運動,不對人體造成二次傷害。文獻[42]設計了一個雙臂外骨骼系統,提出了非對稱雙手協調控制策略以執行協作操作,保證運動的柔順性。
2.4 智能控制
在人工智能飛速發展的大環境下,用于上肢康復外骨骼機器人的一些自身具有學習能力的智能控制方法逐漸得到研究人員的重視。例如神經網絡控制方法、強化學習控制方法。
文獻[43]提出了一種基于貪心神經網絡控制器的神經損傷患者上肢康復訓練方案。該控制模式包括一個基線控制器和一個高斯徑向基函數網絡,該網絡用于模擬受試者的功能能力,并為受試者提供相應的任務挑戰。為了鼓勵受試者的主動參與,基于貪心策略對評價受試損傷程度的徑向基函數網絡的權向量進行更新,使受試提供的最大力量隨時間的推移逐步被學習。同時,根據受試者的任務表現,采用挑戰等級修正算法對任務挑戰進行調整。通過實驗表明,所提出的控制器對促進受試者在訓練過程中的自愿參與度具有顯著的潛力。然而,該工作僅使用平均誤差作為評估受試者任務績效的指標。如何對運動質量進行更準確的評估,例如是否可以通過對照臨床試驗來評估該控制方法的治療效果,是未來的一個研究重點。
除神經網絡控制方法之外,已有大量研究表明強化學習控制方法適用于上肢康復外骨骼機器人的控制。引入強化學習控制方法不但可以降低系統設計時,過多依賴于專家知識、先驗知識、精確的訓練樣本以及示教信息等內容,還可以通過與被控對象間的交互,逐步優化系統的控制性能[44]。
強化學習是控制模擬上肢功能性電刺激系統的一種方法。文獻[45]應用強化學習設計了一種用于外骨骼系統的非線性控制器。強化學習方法通過與環境的相互作用來學習,為了有效地利用收集到的數據,通過人工神經網絡模型來模擬大量的經驗片段。將該控制方案與PID 控制比較,并對5 名健康受試者在平面伸展實驗中的表現進行比較。結果表明,兩個控制器都正確地驅動手臂到目標位置,平均絕對誤差<1°。但強化學習控制在整定時間、位置精度和平滑度方面明顯優于PID 控制。
文獻[46]提出了一個機器人訓練器的框架。它是用戶自適應的,既不需要特定的期望軌跡,也不需要用戶的運動系統的物理模型,通過使用無模型強化學習來實現這一點。在該研究中,采用了一種策略梯度類型的強化學習算法作為輔助機器人訓練的核心。該學習算法的目標是使任務完成度最大化,同時使機器人的輔助力最小化。策略梯度方法的一個優點是可以選擇對任務有意義的狀態和策略表示并合并領域知識,這通常在學習過程中比基于值函數的方法需要更少的參數;另一個優點在于它是一種無模型方法。基于以上優點,該方法已應用于機器人學習研究中,包括人機交互研究。
文獻[47]在2016 年提出直接從用戶和機器人之間的交互來學習輔助策略。將輔助策略的學習問題表述為策略搜索問題。為了減輕用戶在數據獲取方面的負擔,開發了一個基于數據效率的模型強化學習框架。使用開發的實驗平臺,驗證了該方法的有效性。對于機械臂輔助控制任務的學習實驗,僅通過30 s 的交互就可以獲得實現機器人控制任務并減少用戶肌電信號的適當輔助策略。
基于以上基礎,文獻[48]又在2017 年對模型強化學習框架進行了豐富。在成本函數中并沒有明確提供所需的軌跡,而是只考慮用戶通過肌電信號測量的肌肉運動來學習輔助策略,使用戶通過自己的意圖動作來執行任務。由于肌電信號是通過用戶自己的肌肉產生而不是機器人的協助來實現的,所以肌電信號可以被理解為當前協助的“成本”。將改進的方法應用到一自由度的外骨骼機器人上,并進行了一系列的實驗。結果表明,該方法學習了正確的輔助策略,明確地考慮了用戶和機器人之間的雙向交互只有60 s,同時能夠有效地處理機器人動力和運動軌跡的變化。對于上述的上肢康復訓練系統的主要特征如表1 所示。
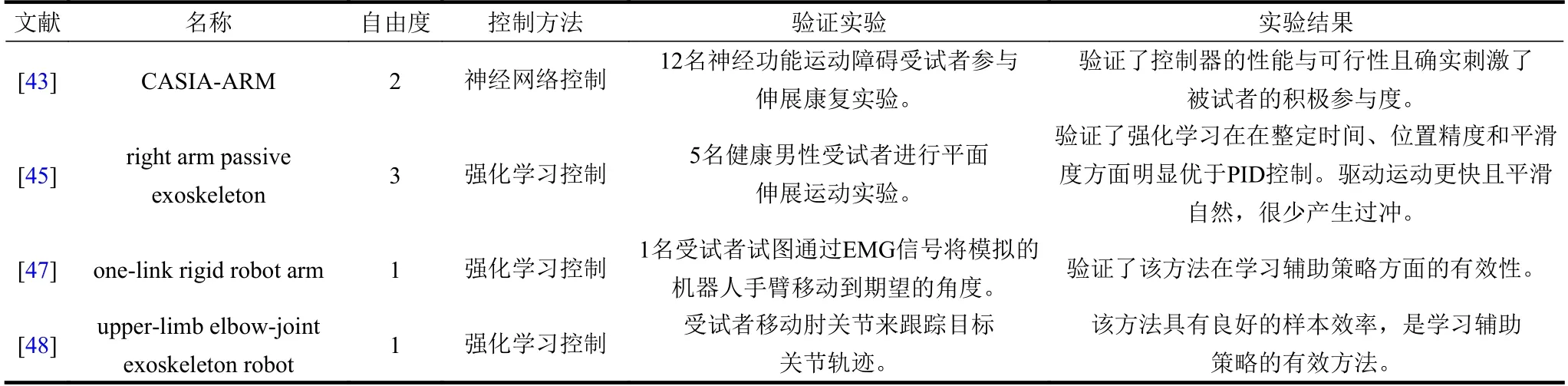
表1 智能控制上肢康復訓練系統的主要特征
到目前為止,臨床研究還不能證明機器人治療優于傳統方法。根據個體的運動缺陷進行個性化的機器人輔助治療可能有助于實現這一目標。因此,個性化控制這一智能控制方法開始廣受關注[49]。
文獻[50]提出了一種統計方法,自動個性化機器人康復。該方法使用不同的運動表現指標來評估運動改善并在治療期間適應運動任務。將該方法在患者身上進行測試,結果與接受傳統物理治療的類似患者進行了比較。試驗結果顯示,使用個性化機器人方法訓練的受試者在臨床測試、運動學和肌肉活動方面有更好的結果。
文獻[51]設計了一種基于患者定制方法的三維上肢康復機器人系統,它通過將患者包含在控制回路中,實時調整治療特性以適應患者的需求。該系統由七自由度機器人手臂、自適應交互控制系統和患者性能評估模塊組成。它通過一個不顯眼的感知系統記錄患者的生物力學數據,評估患者的生物力學狀態,更新機器人的控制參數,以修改三維空間中的輔助水平和任務復雜性。通過對健康受試者進行實驗,驗證了該系統的可靠性,并提供了二維和三維空間的結果。
文獻[52]考慮到如何優化上肢外骨骼康復機器人的效用,采用最陡梯度這一新的原則進行運動性能的選擇。其原理是基于映射整個工作空間的運動性能,然后選擇位于性能最好和最差之間最陡峭的過渡區域的運動。為了評估該原則的好處,進行了對照試驗,分別比較了15 次機器人輔助觸達訓練對兩組因中風而患有中重度慢性上肢偏癱患者上肢運動障礙的效果。與對照組相比,實驗組有明顯改善,但是實驗也表明該方法更加適用短期訓練。在未來的發展中,下一步將是評估較長時間的個性化培訓以及這個原理是否適用于其他運動障礙例如步態運動,或者其他設備例如下肢外骨骼,甚至一些不需要輔助力的設備。
3 討論與展望
本文從基于控制策略的角度介紹了上肢康復外骨骼機器人系統的最新研究進展,系統的控制流程及特點如圖1 所示。將人體主動產生的信號傳遞給機器人,依據康復需求進行被動控制策略或主動控制策略的選擇與切換。不同的控制方法具有各自的特點。在被動控制策略中,PID 控制不依賴于模型,滑模控制可以變結構適應系統參數的變化,模糊控制的出現使系統具有了容錯能力,肌電信號控制可以生成參考軌跡;在主動控制策略中,阻抗/導納控制具有柔順性,自適應控制可以在線校正調整系統運行過程,協調控制具有動態交互性,智能控制具有學習能力。
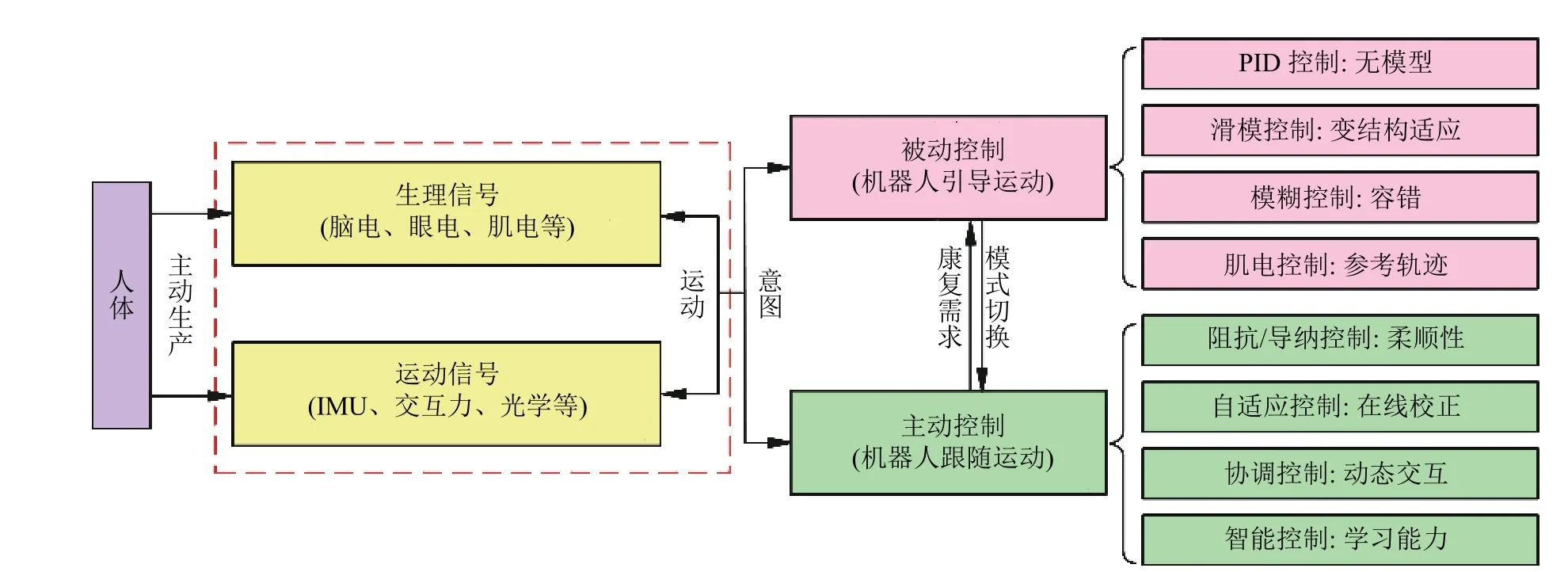
圖1 上肢康復外骨骼機器人控制流程及特點
當前,關于上肢康復外骨骼機器人系統還有許多問題有待研究,關于其控制策略的發展將會有以下幾個趨勢:
1) 研究復合控制策略。通過對上肢康復外骨骼機器人的控制策略分析發現,盡管本文中將每一種控制方法單獨列出,但是已經出現了多種控制方法混合使用的情況。單一的控制方法各有優缺點,而復合控制策略可以揚長避短,滿足控制要求。因此,在未來的研究中不同控制方法的混合使用將成為一種趨勢。
2) 從下肢康復外骨骼機器人中獲得啟示。下肢運動的節律性使其相關的研究進展比上肢要快。文獻[53]采用智能仿生技術設計與下肢關節特性更為貼近的假肢;文獻[54]在下肢康復外骨骼中采用了層次交互學習方法;文獻[55]設計具有用戶反饋的神經網絡下肢矯形器。此類在下肢中使用的關鍵技術對上肢的發展是一個啟發與引領。
3) 康復性能評價指標問題。對于控制系統如何選取適當的評價指標是學者們一直關注的問題之一。以往經常使用傳統機器人控制的測量方法,如軌跡誤差、生物學相關的測量方法或是特定任務的運動質量測量方法等。度量的選擇不僅是對交互的調節,還包括對人與機器人之間物理交互的有效性評估。文獻[56]將信息論原理應用于人機交互的研究,使身體作為信息通道、身體的運動作為信息傳遞,使定量解釋成為一種可能。這一理論為未來設計評價指標提供了一個新思路。因此,未來研究有必要選擇更為合適的康復性能評價指標。
4) 臨床測試與應用問題。在對上肢康復外骨骼機器人的歸納分析中發現,現有的大部分機器人系統只對部分健康受試者或患者進行測試實驗,距離投入實際應用還面臨巨大挑戰。因此,還需更嚴格的臨床測試與康復評價,同時保證控制系統的安全性顯得尤為重要。面對臨床醫學中大量的需求,外骨骼機器人現在已成為倍受人們關注的前沿研究領域。隨著外骨骼機器人控制策略不斷豐富完善,將會吸引越來越多的科研人員加入這一研究行列。總之,發展也就意味著機遇,作為造福人類健康的工具,在未來,外骨骼機器人將會更好地服務于人。
本文工作得到沈陽市科學技術計劃重大科技研發項目(18-400-6-16)的資助,在此表示感謝。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
特別健康(2018年2期)2018-06-29 06:13:44
通信電源技術(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14