敏捷SAR衛星星上實時任務規劃設計
2020-10-16 10:57:06張磊謝松姚芳謝斌
航天器工程 2020年5期
關鍵詞:規劃
張磊 謝松 姚芳 謝斌
(航天東方紅衛星有限公司,北京 100094)
隨著星間組網技術的發展及星上智能化水平的提高,多顆衛星能夠通過星間網絡互聯進行在軌自主協同,從而彌補單星能力不足,提高信息獲取的時效性、多源性和準確性。對于多星協同的實時引導成像,根據應用場景和任務需求,不同有效載荷類型的衛星和不同軌道高度的衛星可基于星間網絡互聯建立引導關系,協同完成任務。引導衛星根據有效載荷實時探測結果生成目標引導信息,并通過星間網絡將其發送給成像衛星。成像衛星接收到目標引導信息后,根據本星狀態、能力、資源約束等自主完成對目標成像的規劃調度。地面管控中心負責協同任務的組織籌劃,但受測控、數傳等資源限制,通常難以作為信息節點實時參與到引導任務過程中。在實時引導成像任務中,由于目標出現的時空隨機性大、過頂成像窗口臨近等特點,客觀上要求成像衛星具有星上實時任務規劃能力,以滿足對動態任務實時響應的需求。
星上自主任務規劃通常包含感知、決策、執行等環節,具有動態感知、快速響應、自主執行等特點,能夠在星載綜合電子系統支持下,針對用戶任務需求或在軌事件,根據平臺、有效載荷的運行狀態及使用約束,由衛星自主編排任務計劃、制定動作序列和生成控制指令。星上自主任務規劃技術對于提高敏捷衛星使用效能、實現多星在軌自主協同具有重要意義。目前,星上自主任務規劃技術在國內外衛星上已有應用,如美國的地球觀測-1(EO-1)衛星[1]、法國的“昴宿星”(Pleiades)衛星[2]、我國的高分三號衛星[3]等,它們在任務類型、規劃過程、自主化程度等方面均具有各自的特點。針對敏捷衛星自主任務規劃,國內外已開展了若干研究。文獻[2]中構建了“昴宿星”衛星任務規劃問題模型,對貪婪算法、動態規劃、約束規劃、局部搜索4種方法的求解情況進行了比較。文獻[4]中針對天氣等外部環境對成像任務的影響提出一種結合隨機貪婪算法的反應/慎思型自主任務規劃結構,以提高任務成功率。文獻[5]中針對敏捷光學衛星設計了自主任務管理系統,將單軌執行任務數提高至20個。文獻[6-7]中基于規劃-決策模式提出一種結合執行和信息反饋的自主任務規劃框架,以提高任務完成率,并針對24 h的觀測回傳任務進行了仿真。通過對相關文獻及工程技術現狀的調研發現,不考慮有效載荷工作模式的區別,已有研究通常面向單星長期靜態任務及低動態事件處理(如應急任務、天氣影響或衛星狀態變化),甚少涉及高動態的實時引導成像任務,對相關自主任務規劃方法研究較少。但是,兩種任務場景區別較大,后者的特點是任務持續時間較短,任務過程目標不斷隨機動態出現,觀測沖突在全局上普遍存在但不可預知且局部可能較劇烈、引導觀測時間鏈短,因此,已有研究仍顯不足,需要進一步開展以在軌協同為應用背景的敏捷衛星實時任務規劃研究。
敏捷SAR衛星將SAR載荷固定安裝在衛星平臺上,通過平臺姿態機動實現波束指向,具有較強的三軸姿態機動能力及多種成像模式[8-10]。為滿足實時引導成像任務對衛星自主協同、實時響應的要求,本文設計了敏捷SAR衛星星上實時任務規劃的運行框架、策略、過程及方法,并通過模擬實時引導成像工作過程的仿真算例對其正確性和有效性進行了驗證。
1 實時任務規劃設計
敏捷SAR衛星星上實時任務規劃設計包括運行框架、策略、過程及方法4個方面。首先,從實時引導成像任務過程及特點出發,基于規劃-決策模式構建滾動規劃結合動態重規劃的星上實時任務規劃運行框架,并制定長規劃窗口與短決策窗口滾動推進的規劃-決策策略。然后,根據運行框架及策略設計以事件觸發或固定周期推進的星上實時任務規劃運行過程。最后,對運行過程中的多點目標成像規劃問題,考慮到問題的求解規模較小,采用深度優先的樹搜索技術搜索最優成像目標序列,并利用沖突消解與收益預測規則對搜索樹進行剪枝,以加快搜索速度。
1.1 運行框架
敏捷SAR衛星星上實時任務規劃運行框架包含滾動規劃模塊、動態重規劃模塊及執行決策模塊,如圖1所示。滾動規劃模塊實現規劃窗口的滾動推進、待規劃任務隊列的確定、是否觸發重規劃的判斷和可觀測任務隊列的生成等功能。動態重規劃模塊根據重規劃策略對可觀測任務隊列進行調整,包括插入、刪除和完全重規劃等操作。執行決策模塊通過查詢可觀測任務隊列確定臨近執行的觀測任務,根據任務參數按指令模板生成程控指令序列并發送。運行框架該設計主要考慮任務的兩個特點。
(1)實時引導過程連續且目標成像窗口臨近成像衛星。任務過程中,引導衛星按照固定的時間周期或采用事件觸發方式逐次向成像衛星發送目標引導信息。實時引導的目標,特別是移動目標,對成像時效性的要求較高,成像衛星收到引導目標時一般距其成像窗口僅幾分鐘甚至更短。在這種情況下,成像衛星必須采用流水式的滾動規劃方式。
(2)在逐次引導和滾動規劃過程中,成像衛星后續接收到的引導目標的成像窗口可能在之前已規劃可成像的目標之前,即目標的被規劃次序與成像窗口順序倒置。對于具有優先級屬性的目標,這種時序上的倒置可能造成后到達的高優先級目標因為未參與前序規劃而無法被安排成像。因此,成像衛星必須能夠對前序規劃結果進行調整,即動態重規劃。

圖1 實時任務規劃基本運行框架Fig.1 Basic operational framework of real-time mission scheduling
1.2 運行策略
敏捷SAR衛星星上實時任務規劃采用長規劃窗口與短決策窗口滾動推進的規劃-決策策略,如圖2所示。首先,每次滾動規劃對于整個任務過程而言都是一次局部規劃,待規劃任務隊列僅是全局任務隊列的子集且后序規劃往往受前序規劃結果影響,因此,多次滾動規劃難以在全局層面獲得最優成像序列,而采用長規劃窗口以擴大局部規劃的任務集,有助于獲得較優的全局成像序列。其次,采用短決策窗口僅對已規劃可成像隊列中第1條程控指令時刻位于決策窗口內的目標進行指令輸出,使得星上任務規劃在后序規劃中能夠根據新接收目標情況對隊列中未輸出指令的目標進行動態調整,這樣既保證及時觀測,又滿足任務對動態重規劃的需求。
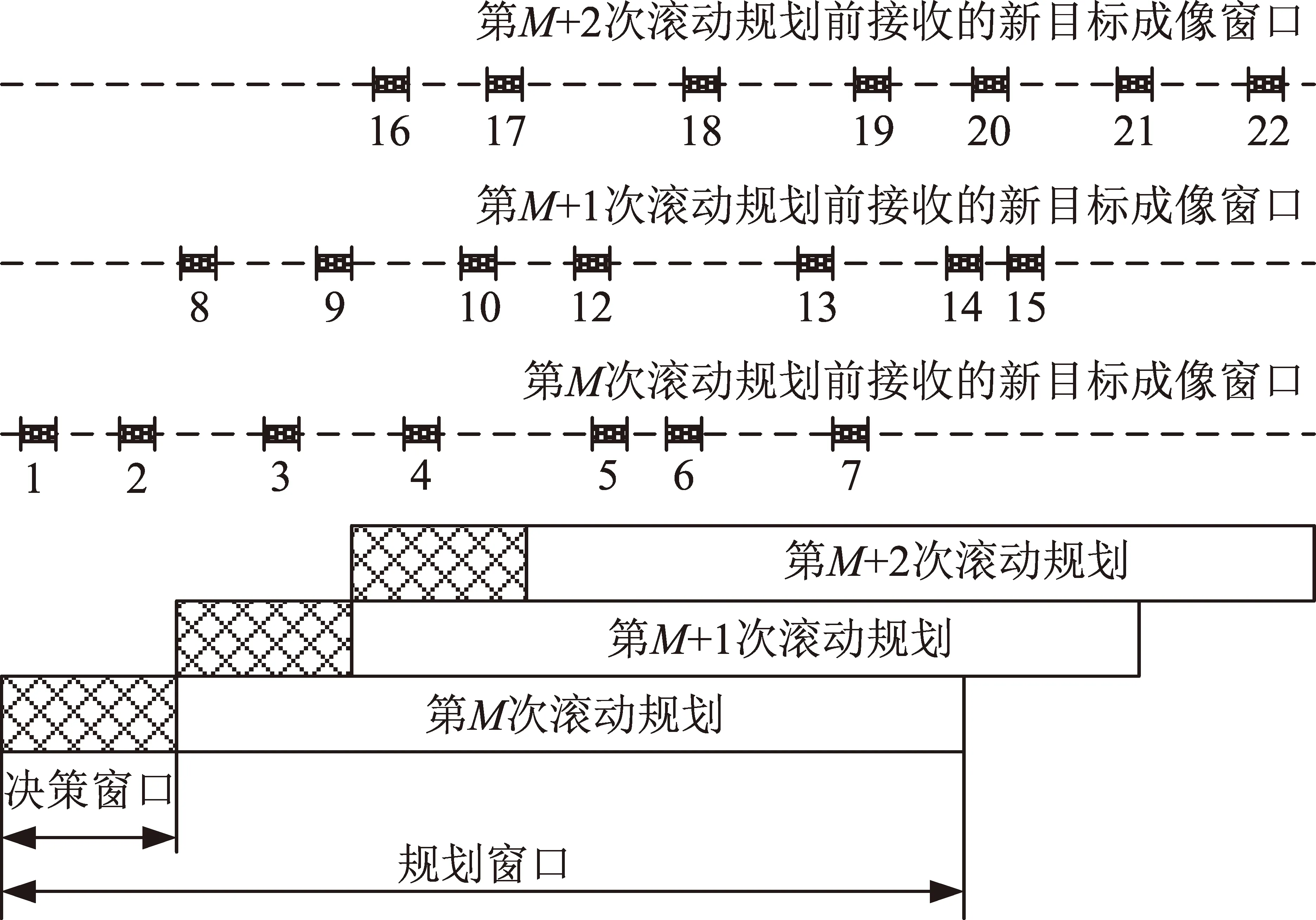
圖2 實時任務規劃的規劃與決策窗口Fig.2 Scheduling and decision windows of real-time mission scheduling
1.3 運行過程
敏捷SAR衛星星上實時任務規劃運行過程,如圖3所示。

圖3 實時任務規劃運行過程Fig.3 Procedure of real-time mission scheduling
對于采用固定周期推進的滾動規劃過程,可采用規劃窗口與決策窗口同步推進的策略,決策窗口與滾動周期一致。對于采用事件觸發推進的滾動規劃過程,可采用規劃窗口與決策窗口異步推進的策略,在滾動規劃觸發前決策窗口按固定周期推進。重規劃規則包括僅插入、刪除-插入、完全重規劃等。實時任務規劃作為星上應用軟件,其進程由星上實時操作系統管理和調用,按固定周期及預先分配的時間片被調度執行。
1.4 多點目標成像規劃方法
敏捷SAR衛星平臺具有三軸快速姿態機動能力,與有效載荷配合可實現對點目標的正側視條帶成像、斜視條帶成像、滑動聚束成像,以及對區域目標的多條帶拼接成像。在實時引導成像任務中,引導目標通常為任務區域內的若干點目標,受限于目標成像窗口、平臺有效載荷使用約束、星上資源等條件,對這些點目標的成像可能存在沖突,因此,需要通過成像規劃確定合理的成像目標序列,充分發揮平臺敏捷機動能力,獲得較好的成像收益。
1.4.1 點目標屬性及成像元任務
點目標T的屬性為
T:〈SID,φLat,λLon,MImg,TImg,RPrio〉
(1)
式中:SID為目標編號;φLat和λLon分別為目標位置的緯度和經度;MImg和TImg分別為目標成像模式和成像時長;RPrio為目標優先級。
點目標的屬性參數不能直接用于成像規劃,必須將其轉化為成像元任務屬性參數。
1)正側視條帶成像元任務
SAR載荷正側視條帶成像采用被動推掃方式,成像過程中衛星保持側擺姿態(滾動),并按全零多普勒導引律進行姿態導引,成像中心時刻為衛星相對目標的零多普勒時刻。其元任務ESd屬性為
ESd:〈SID,TSt,TFn,ARoll,SBeam,FProf〉
(2)
式中:TSt和TFn分別為成像起始時刻和結束時刻;ARoll為姿態滾動角;SBeam為波束編號;FProf為成像收益,見式(3)。
FProf=kRPrio
(3)
式中:k為大于1的整數。
2)斜視條帶成像元任務
SAR載荷斜視條帶成像同樣采用被動推掃方式,成像過程中衛星保持側擺姿態(滾動、俯仰),成像中心不是衛星相對目標的零多普勒時刻。考慮圖像質量,斜視條帶成像受斜視角約束。根據斜視角約束,可以計算衛星對目標的成像窗口。其元任務ESq屬性為
ESq:〈SID,TMin,TMax,SBeam,TImg,FProf〉
(4)
式中:TMin和TMax分別為成像窗口的前沿時刻和后沿時刻。
3)滑動聚束成像元任務
SAR載荷滑動聚束成像通過衛星平臺姿態機動對負高程虛擬點凝視使波束掃過目標點,成像中心時刻為衛星相對目標的零多普勒時刻。其元任務ESs屬性為
ESs:〈SID,TStc,{ASt},TFnc,{AFn},
φVp,λVp,HVp,SBeam,FProf〉
(5)
式中:TStc和TFnc分別為滑動聚束成像的起始時刻和結束時刻;{ASt}和{AFn}分別為滑動聚束成像的起始姿態和結束姿態;φVp,λVp,HVp分別為虛擬點緯度、經度、高程。
1.4.2 成像規劃約束條件
在多點目標成像規劃中需要考慮下列約束條件。
(1)相鄰2次成像的姿態轉換時間滿足平臺姿態機動能力,如式(6)所示。
(6)

(2)相鄰2次成像間的姿態機動角度小于最大允許姿態機動角度。
(3)多點目標連續成像載荷累積成像工作時長小于最大允許工作時長。
(4)多點目標連續成像姿態機動累計次數小于最大允許姿態機動次數。
1.4.3 成像目標序列擇優規則
對于多點目標成像,存在若干可行的成像目標序列,因此,在成像規劃中需要從這些可行序列中進行擇優。擇優規則可以設置多個判據,并根據任務需求安排這些判據的取舍及執行順序。
在帶有優先級屬性的多點目標成像任務規劃中,記可行的成像目標序列為QListFea,序列由若干無成像沖突并按成像先后順序排列的目標元任務構成,如式(7)所示。
QListFea={Ei}
(7)
式中:Ei為序列QListFea中的第i個目標。
首要判據為序列總收益最大,如式(8)所示。
(8)
式中:FProf(Ei)為序列QListFea中目標Ei的收益。
次要判據為高優先級目標數量最多,如式(9)所示。
(9)

1.4.4 成像目標序列規劃算法
當前用于對地成像衛星任務規劃的算法[11]大致可分為確定性算法、啟發式算法和搜索算法3類,這些算法在不同的應用場景下各有優劣。對于星上自主任務規劃而言,應著重考慮算法運行的硬件環境、一次規劃數據輸入量和一次規劃運行時間約束等條件,要求規劃算法具有效率高、開銷小和穩定收斂的特點,能夠滿足星上實時性、可靠性要求。實時引導成像一次任務約有幾十個點目標,成像規劃問題的求解規模較小,因此,本文采用深度優先的樹搜索技術[12-13]搜索最優成像目標序列,在搜索過程中利用沖突消解規則、收益預測規則對搜索樹剪枝,以縮小搜索空間、加快搜索速度。其大致步驟為:①根據衛星當前狀態構造虛擬成像元任務,作為搜索樹的根節點;②對待規劃成像元任務按零多普勒時刻進行排序,用于構造搜索樹各層的子節點;③采用深度優先搜索算法遍歷搜索樹,利用沖突消解規則、收益預測規則裁剪搜索樹;④按擇優規則比較新獲取成像目標序列與已獲取最優成像目標序列,更新最優序列;⑤搜索完成,確定最優成像目標序列。
考慮到星上存儲資源有限,難以存儲完整的搜索樹,因此僅保存元任務隊列,在搜索過程中動態生成子節點。沖突消解規則是成像規劃約束條件的約束滿足規則,對于不滿足約束的元任務,剪除以該元任務為根節點的左子樹。收益預測規是指若當前所搜索序列的成像收益不可能大于當前最優成像目標序列的收益,剪除以當前節點為根節點的右子樹,收益預測規則的判據如式(10)所示。
(10)

每次通過沖突消解剪枝后或搜索到葉子節點,即獲取一個可行的成像目標序列,此時需要根據擇優規則更新最優成像目標序列。
2 仿真驗證
2.1 仿真設定
如圖4所示,SAR波束固定安裝方向沿衛星本體坐標系OXYZ的+Z軸。星上實時任務規劃采用固定時間周期推進的滾動規劃方式,每100 s推進1次。點目標分布情況如圖5所示,目標圖示M-SID-RPrio表示第M個滾動周期內接收的新目標的編號SID及其優先級RPrio。優先級設置為1~5級,重要程度逐級升高,計算收益時k取4。單個目標成像時間6 s。基于該場景分別對正側視條帶成像模式、斜視條帶成像模式下的敏捷SAR衛星星上實時任務規劃過程進行仿真。對于滑動聚束模式,盡管其在成像模式上與正側視條帶模式不同,但從成像規劃的角度看,其成像時刻在元任務中是確定的,因此二者在多點目標成像規劃的處理上是相同的。
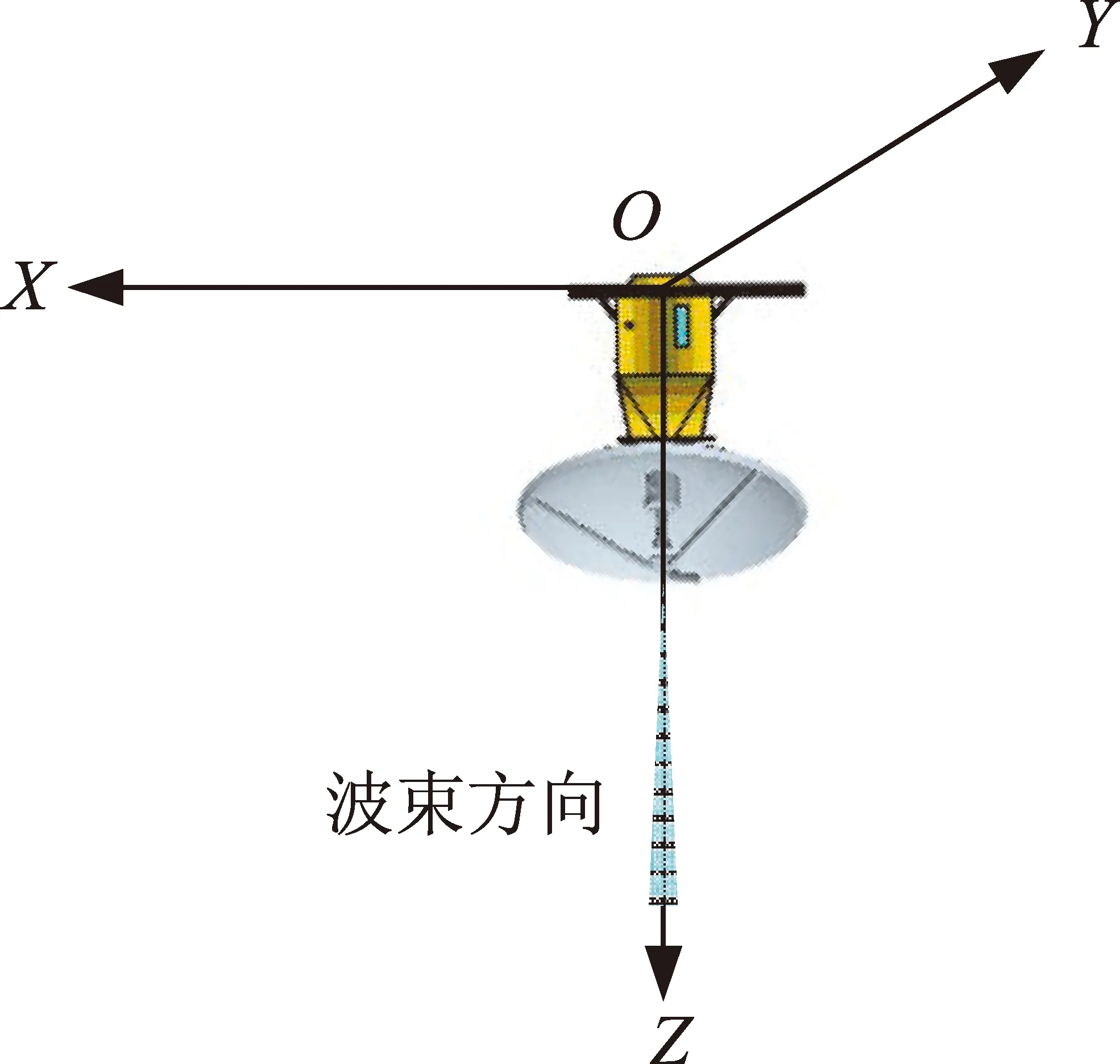
圖4 SAR波束安裝方向示意Fig.4 SAR beam installation direction diagram

圖5 點目標分布情況Fig.5 Spatial distribution of target points
2.2 多點目標正側視條帶成像
針對仿真場景的多點目標正側視條帶成像,滾動規劃仿真結果如圖6所示。圖中:規劃可觀測目標以紅色圓形表示;黑色倒三角處為其正側視條帶成像起始時刻,連接各目標的虛線表示成像路徑;因沖突消解舍棄的目標以藍色方形圖標表示;各目標編號標示在圖標上方。整個滾動規劃過程累計規劃目標34個,規劃可成像并輸出目標21個,成像總收益6828,未成像的高優先級目標(優先級不小于4)3個(5級1個、4級2個)。
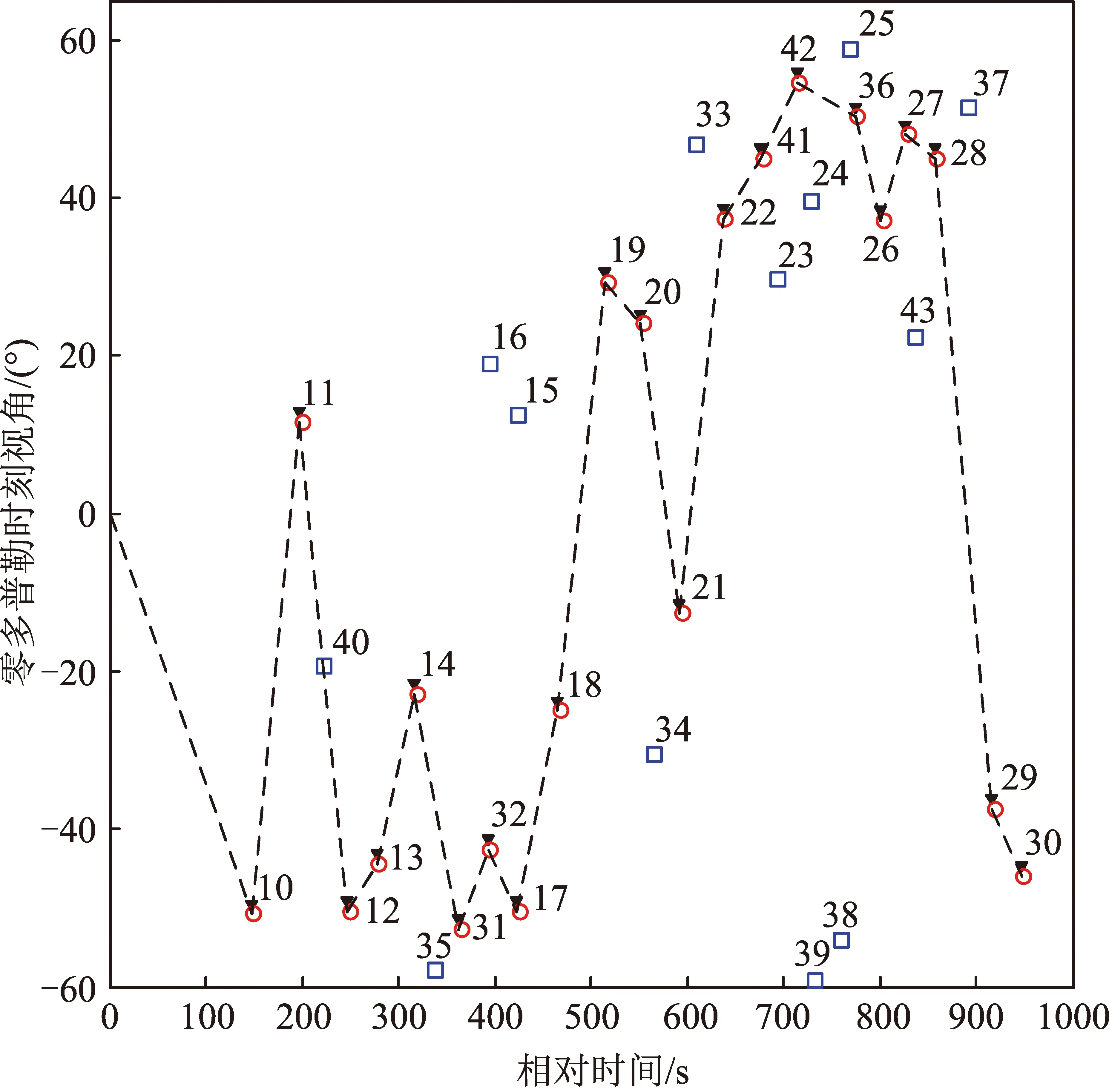
圖6 多點目標正側視條帶成像滾動規劃結果Fig.6 Rolling scheduling results of multi-target points imaging under side-looking strip mode
如圖7所示,星上實時任務規劃按規劃-決策策略共進行了10次滾動規劃,其中,第10次由于未收到新目標而未進行成像規劃,僅進行了指令輸出決策。1次滾動規劃最多規劃11個目標,最多輸出3個目標。
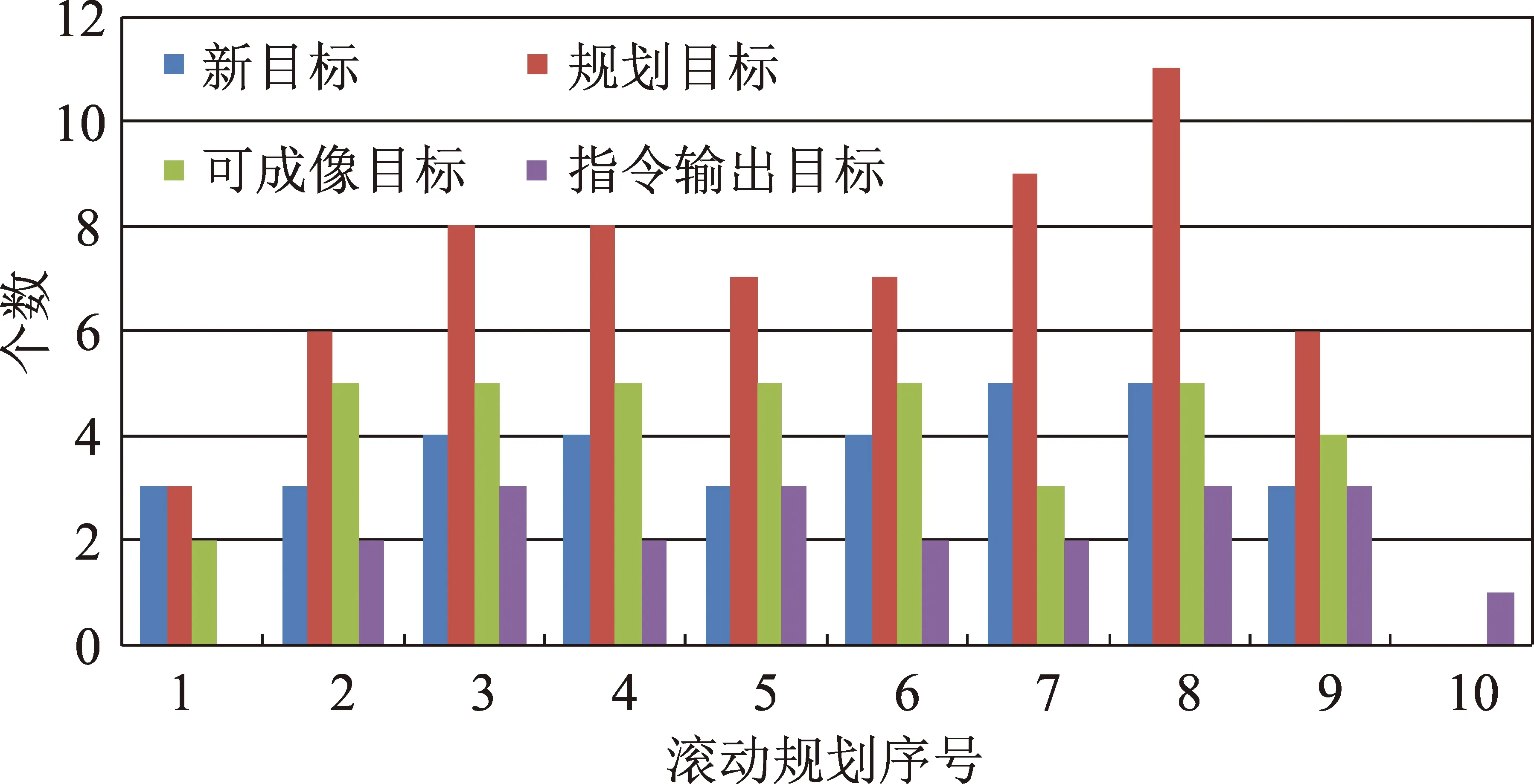
圖7 多點目標正側視條帶成像滾動規劃過程數據Fig.7 Rolling scheduling process data of multi-target points imaging under side-looking strip mode
采用全局規劃方式對所有目標點進行統一規劃,結果如圖8所示。不難發現,該仿真場景下滾動規劃與全局規劃的成像路徑一致。這表明星上實時任務規劃過程所采用的規劃-決策策略是有效的。
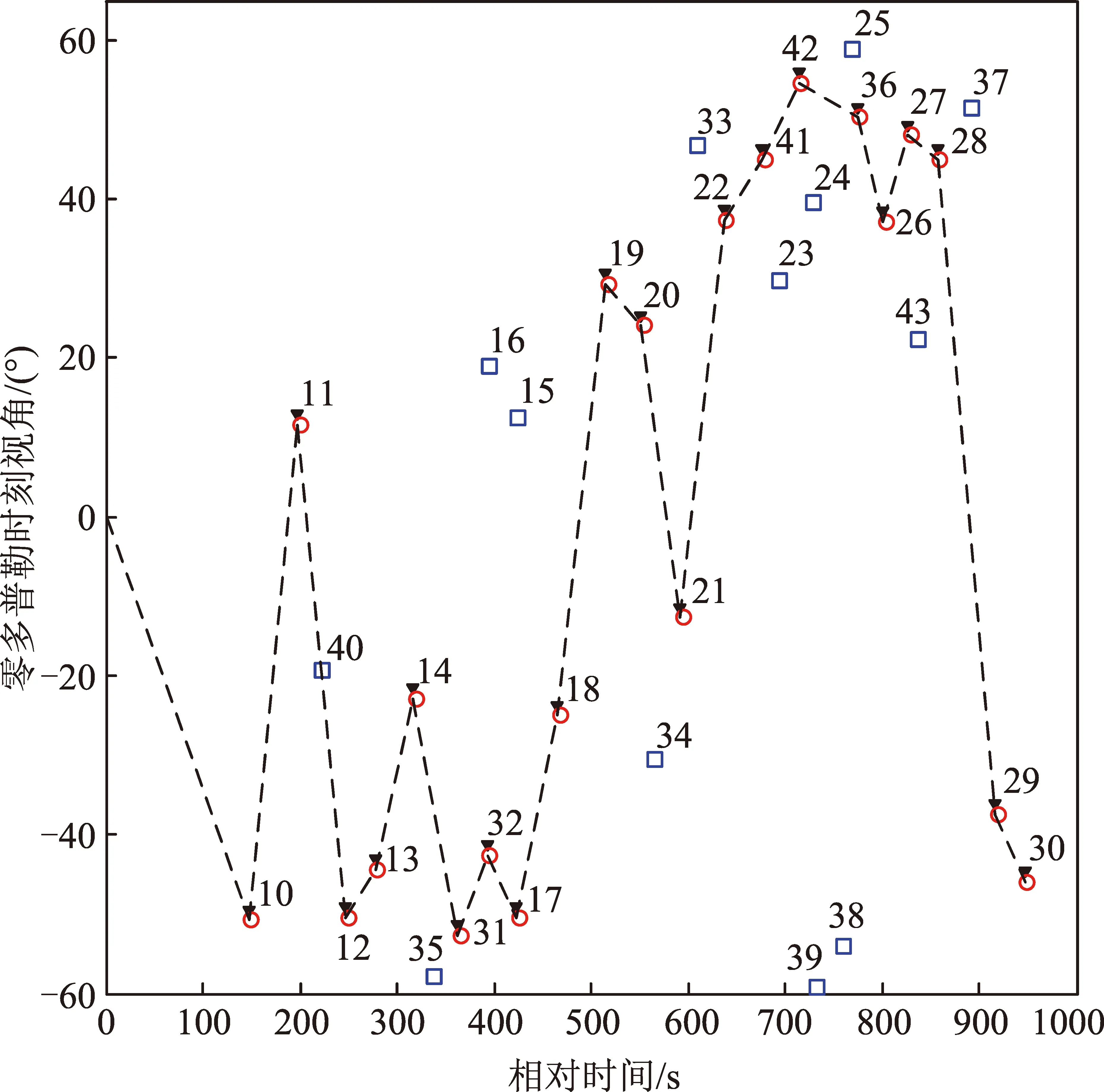
圖8 多點目標正側視條帶成像全局規劃結果Fig.8 Global scheduling results of multi-target points imaging under side-looking strip mode
2.3 多點目標斜視條帶成像
與正側視條帶成像、滑動聚束成像不同,斜視條帶成像的成像時刻不確定。在斜視角約束下,可以確定衛星對目標成像的時間窗口,在該窗口內的任意時刻衛星對目標成像均滿足使用要求。從提高多目標成像效能考慮,本文按“盡早成像”原則在成像窗口內確定成像時刻,即在成像時間窗口內選擇約束滿足的最早可成像時刻作為目標成像時刻。
針對仿真場景的多點目標斜視條帶成像滾動規劃,仿真結果如圖9所示。圖中:規劃可觀測目標的成像窗口以紅綠色條表示,紅色部分表示前斜視窗口,綠色部分表示后斜視窗口,交界處為零多普勒時刻;黑色倒三角處為其斜視條帶成像起始時刻;連接各目標的虛線表示成像路徑;因沖突消解舍棄的目標以藍粉色條表示;各目標編號標示在色條上方。整個滾動規劃過程累計規劃目標34個,規劃可成像并輸出目標29個,成像總收益7400,未成像的高優先級目標(優先級不小于4)1個(5級)。
如圖10所示,星上實時任務規劃按規劃-決策策略共進行了10次滾動規劃,其中,第10次由于未收到新目標而未進行成像規劃,僅進行了指令輸出決策。1次滾動規劃最多規劃9個目標,最多輸出4個目標。
采用全局規劃方式對所有目標點進行統一規劃,結果如圖11所示。由圖11可見:規劃可成像并輸出目標27個,成像總收益8364,未成像目標6個優先級1、1個優先級3。對比后發現,該仿真場景下滾動規劃與全局規劃基于“盡早成像”原則確定的成像時刻存在差異,這是由滾動規劃的局部性造成的,使編號38目標(優先級5)在后序動態重規劃中因與編號36目標(優先級5)沖突且路徑收益小而被放棄。這表明星上實時任務規劃過程能夠通過動態重規劃調整前序規劃結果,從而獲得收益更好的成像路徑。
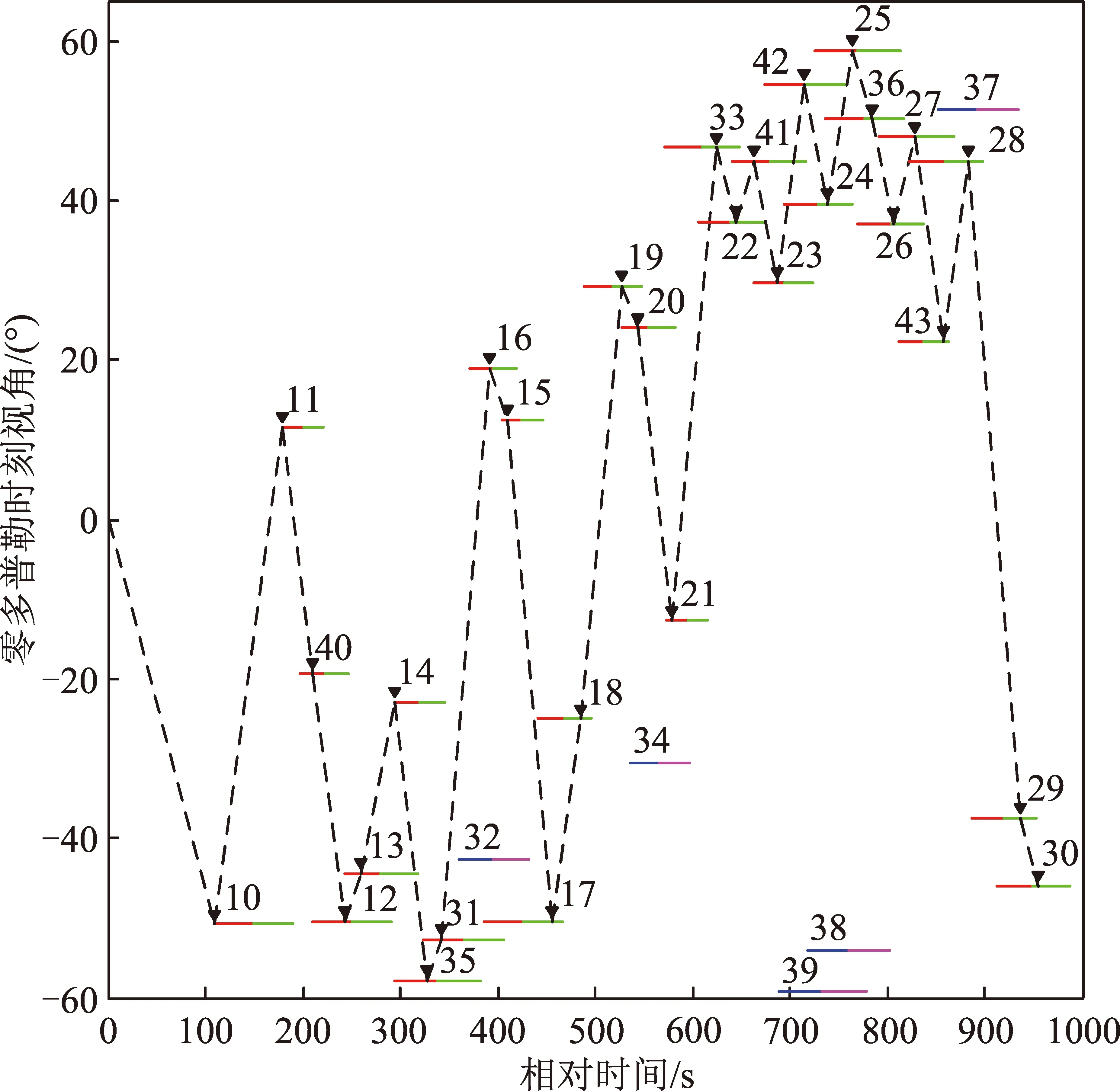
圖9 多點目標斜視條帶成像滾動規劃結果Fig.9 Rolling scheduling results of multi-target points imaging under squint strip mode
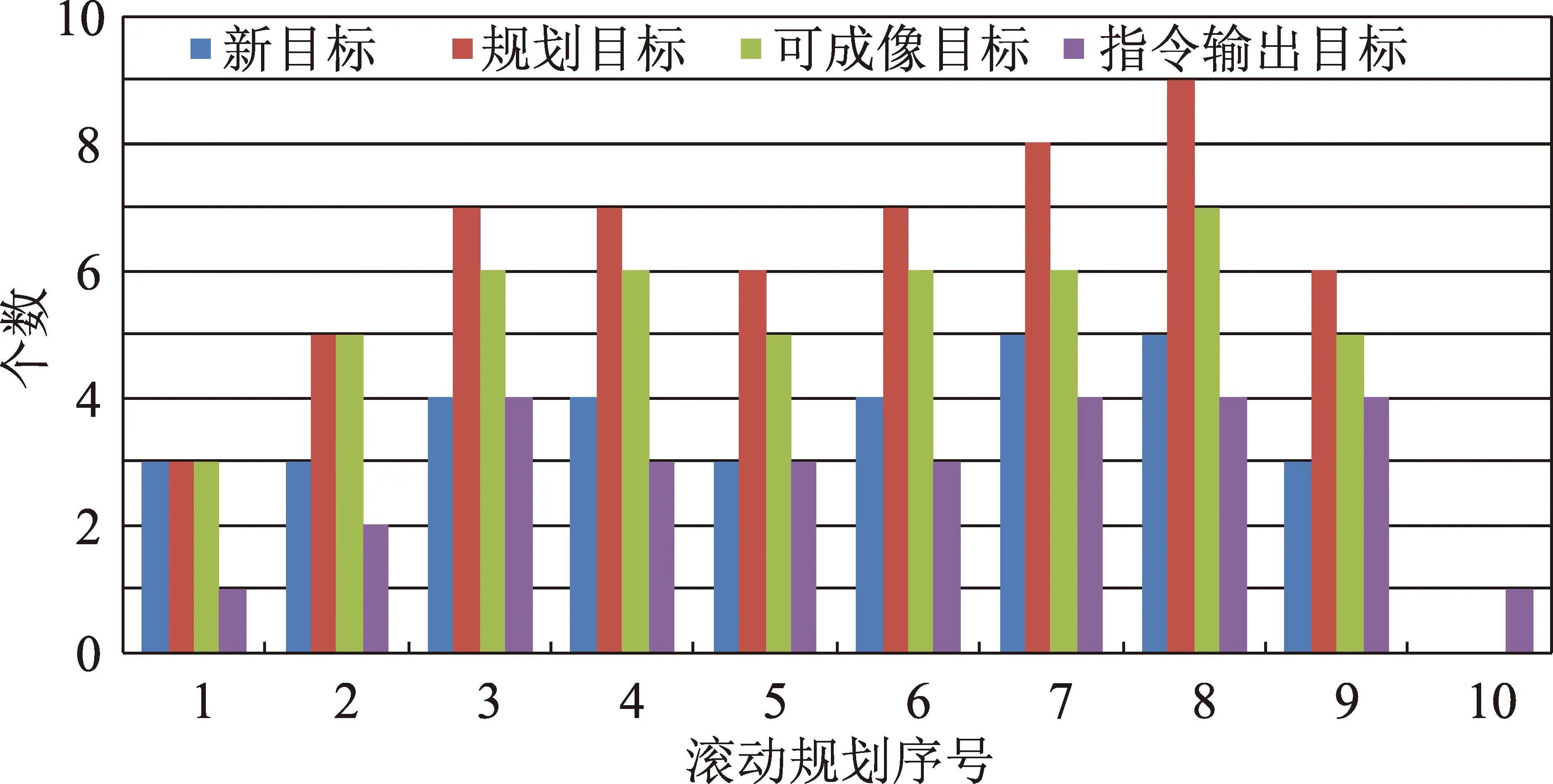
圖10 多點目標斜視條帶成像滾動規劃過程數據Fig.10 Rolling scheduling process data of multi-target points imaging under squint strip mode
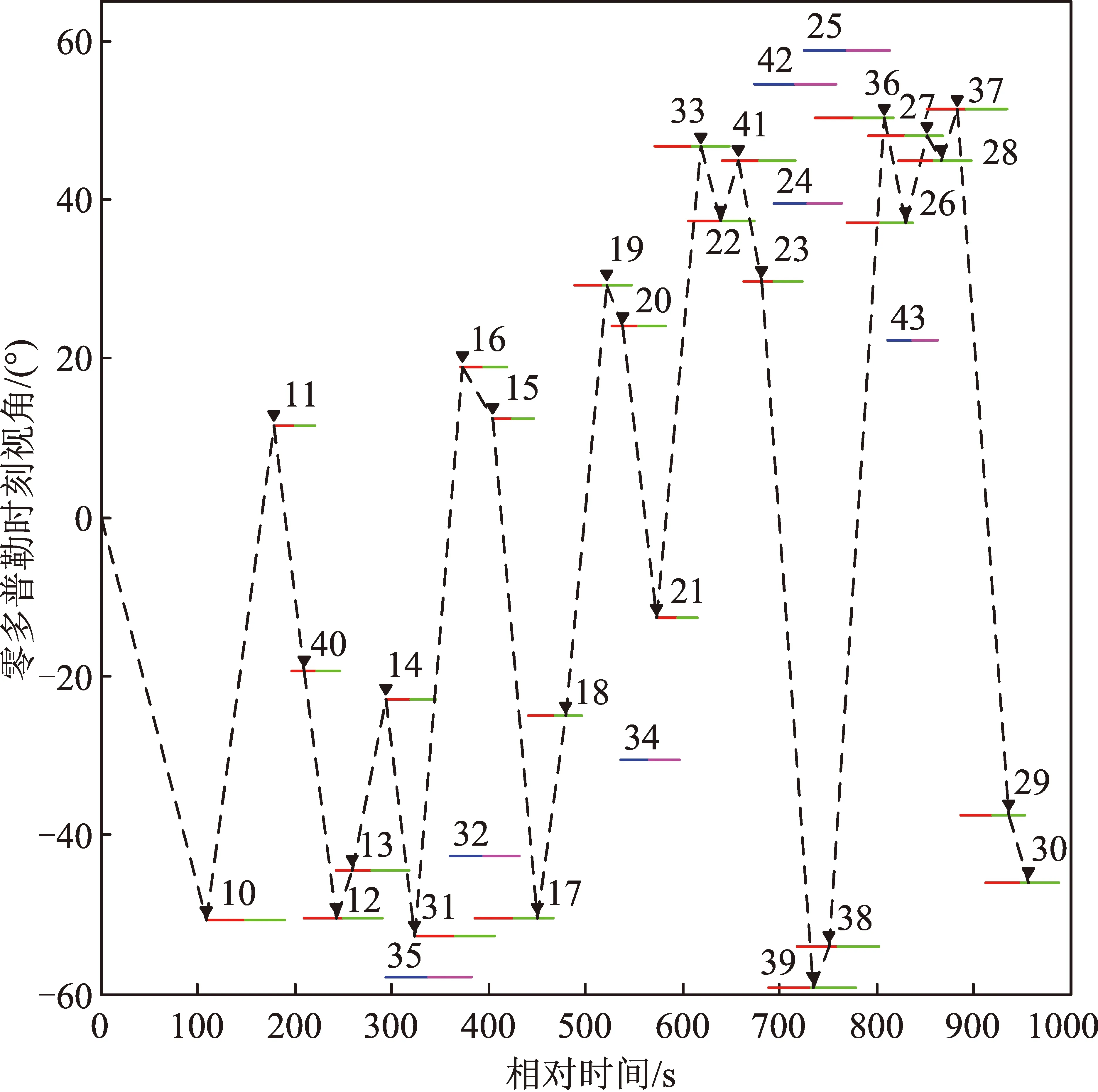
圖11 多點目標斜視條帶成像全局規劃結果Fig.11 Global scheduling results of multi-target points imaging under squint strip mode
3 結束語
針對敏捷SAR衛星在軌實時引導成像任務需求,制定滾動規劃結合動態重規劃的運行框架,以及長規劃窗口與短決策窗口滾動推進的規劃-決策策略,設計以事件觸發或固定周期推進的星上實時任務規劃過程。對于敏捷SAR衛星的多點目標成像規劃問題,采用深度優先的樹搜索技術搜索最優成像目標序列,設計相應的沖突消解規則、收益預測規則,以便在搜索過程中通過剪枝縮小搜索空間、加快搜索速度。基于模擬的實時引導成像任務過程及引導目標數據,分別在正側視條帶成像模式、斜視條帶成像模式下對星上實時任務規劃進行仿真。結果表明:本文提出的星上實時任務規劃框架、策略、過程及方法是有效的,在滾動推進的規劃-決策過程中,能夠根據新接收目標動態調整已規劃結果,通過重規劃獲取新目標集的最佳收益觀測序列并及時決策輸出臨近觀測目標,滾動規劃的觀測序列能夠達到與全局規劃相同或接近的觀測收益。基于該設計的星上實時任務規劃已實現在軌應用并通過驗收,有效滿足了任務需求,可用于在軌協同引導成像任務。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41