自動化集裝箱碼頭AGV調度研究
2020-10-17 05:39:56王斐
黑龍江科學 2020年20期
王 斐
(威海海洋職業學院經濟管理系,山東 威海 264300)
隨著智能化理念的不斷發展及成熟,自動化碼頭也逐漸走進人們的視野。自動化碼頭經歷了20余年的發展[1],雖然我國在自動化碼頭方面發展起步比國外的港口晚,但是發展速度并不落后。目前,各行各業都在追求綠色化和智能化發展,實現人機隔離的自動化碼頭將成為我國港口未來的發展趨勢[2]。我國第四代集裝箱港口已建成的青島新前港、上海洋山港四期和廈門遠海都是自動化碼頭[3]。與傳統的集裝箱碼頭相比,自動化集裝箱碼頭有著多方面的優勢,其具有超高的工作效率、更精確的操作以及人機分離的優點,可以實現超低意外事故發生率。

圖1 遠海全自動化集裝箱碼頭Fig.1 Complete automation container terminal of high seas
1 自動化碼頭研究
宓為建等[4]在研究了傳統的集裝箱碼頭的基礎上,重新定義了梭車式自動化集裝箱碼頭,并對碼頭的作業系統進行了仿真,開拓了自動化集裝箱碼頭的研究。自動化碼頭相較于傳統的碼頭,裝卸工藝發生了很大的改變,文獻[5-11]主要研究了自動化碼頭的主要裝卸工藝。何繼紅[12]在充分研究集裝箱自動化碼頭相關理論的基礎上,對碼頭上的平面布局和碼頭上的機械進行了平面布局的分析研究。Seyed等[13]以裝卸集裝箱使用的時間最短作為衡量指標,研究了自動化集裝箱碼頭的效率問題。高延輝等[14]提出了一種全新的集裝箱碼頭的概念體系,這一系統將雙軌輪小車、橋吊和堆場區域做了雙回字形的布置,具有較高的抗干擾能力。
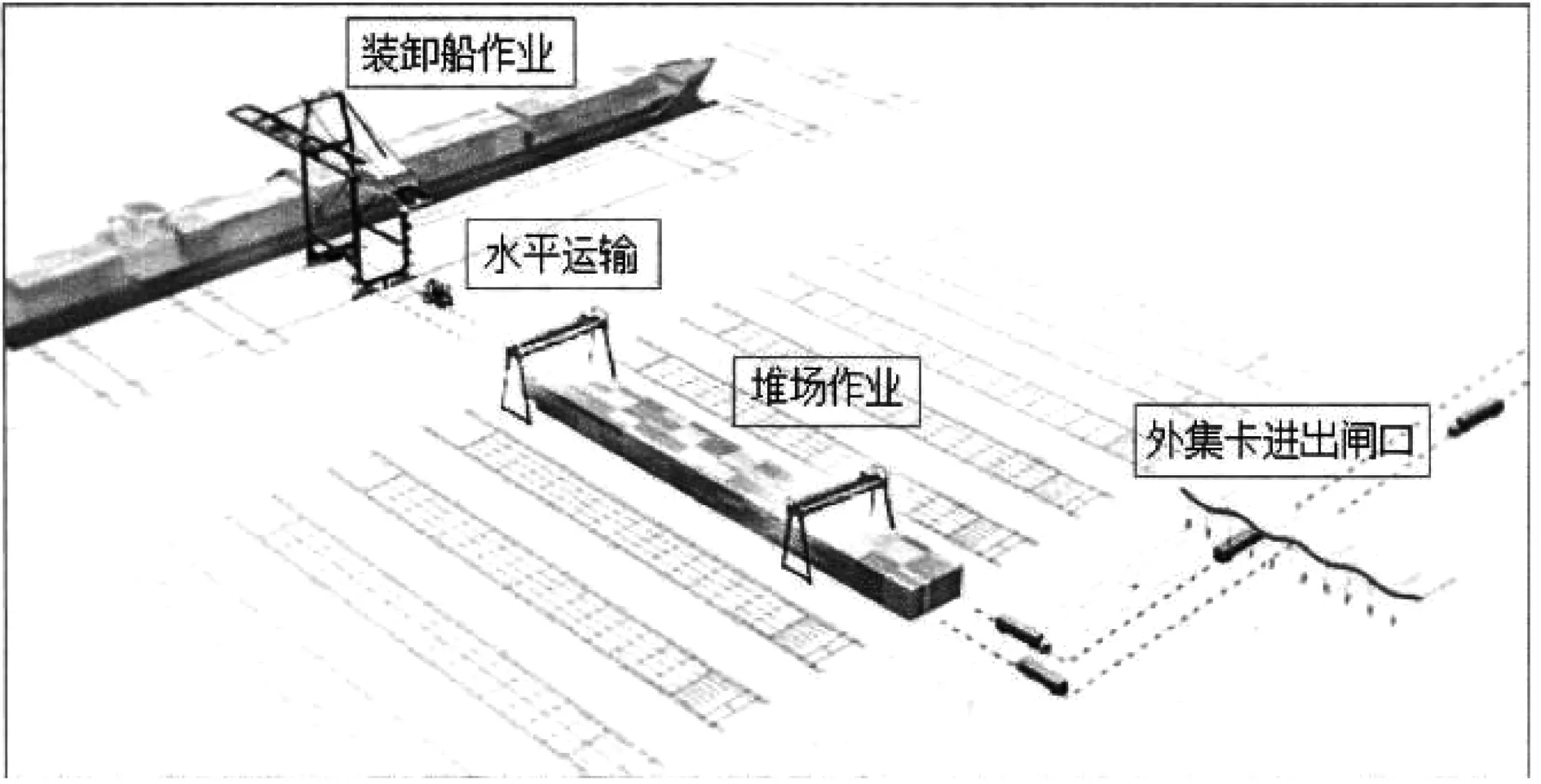
圖2 自動化碼頭整體布局Fig.2 Overall allocation of automated terminal
近幾年,隨著仿真技術的不斷成熟,眾多學者開始通過仿真對自動化碼頭進行研究,大大降低了研究成本,也為自動化碼頭的發展提供了許多指導性意見。He J[15]對自動化集裝箱碼頭進行了系統仿真,在仿真的基礎上對其運作效率進行分析并提出了具有針對性的改進意見。Petering M E H[16]分析了集裝箱碼頭的生產力和堆場規劃之間的必然聯系,并進行了優化,最后通過建模仿真驗證了優化方案的可行性。黃國梁等[17]在Petri 網的理論基礎之上,對散貨碼頭工藝系統進行了仿真,找到了該系統的瓶頸位置并針對瓶頸提出了相應優化措施。
2 自動化碼頭AGV調度研究
自動化集裝箱碼頭最重要的機械是自動導引車(AGV),所以AGV的研究成為眾多學者的關注點。
曾慶成等[18]考慮了對AGV路徑規劃時遇到的擁堵或沖突問題,對AGV路徑進行實時的動態監測,以作業時間最短為優化目標建立模型,并設計了多種蟻群算法對模型的可行性進行了驗證。石楠路[19]考慮到AGV小車需要進行充電這一實際情況,通過優化換電策略,降低AGV小車充電過程對整個自動化碼頭工作效率的負面影響,最后通過遺傳算法驗證了該模型確實有效提高了AGV小車的效率。包曉瓊等[20]考慮在計劃中可以優先選擇部分任務,而對于沒能按時完成即延后完成的任務做出懲罰的原則,建立混合整數規劃模型,對自動化集裝箱碼頭 AGV的調度進行優化。張崢煒等[21]對AGV的任務級別進行劃分,在考慮優先級和路徑地圖中的先驗信息的基礎上,提出了改進的Dijkstra 動態路徑規劃模型,優化了后續AGV小車的運行路徑并使得整個任務完成過程使用的時間最少。梁承姬等[22]通過設計多學科變量的耦合優化方法,以岸邊等待時間最短和使用AGV小車數量最少為目標,研究了AGV調度和AGV配置問題。丁一等[23]以碼頭的運作效率、船舶等待時間和AGV的重在率作為研究目標,建立了混合整數規劃模型對AGV小車的調度問題展開研究。添玉等[24]考慮到自動化碼頭上各種裝卸設備的相互配合,對自帶提升功能的AGV小車的調度進行建模優化,并設計了雙層遺傳算法對模型進行了求解。楊勇生等[25]將自動化集裝箱碼頭的AGV小車和軌道式龍門起重機的調度協調起來,考慮 AGV 和 RMG 任務的分配情況,建立了模型并通過GA進行求解取得了良好的效果。
AGV的調度研究成果有很多,考慮的約束條件、實際情況都很全面,不僅考慮到AGV小車自身的約束,還充分考慮了整個自動化碼頭的機械配合。
3 結語
自動化集裝箱碼頭是港口未來重要的發展方向,是眾多學者的研究對象。AGV小車的調度影響著整個自動化碼頭的效率,學者們研究了AGV小車與碼頭上其他裝卸裝備的配合、先驗信息對后續路徑的影響、AGV小車自身需要充電的實際情況、AGV小車之間的相互影響。但是,碼頭的硬件裝備對自動化碼頭AGV小車調度的影響研究得不夠,可以作為未來研究的重點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54