馬鈴薯振動挖掘試驗臺的設(shè)計與試驗
2020-10-17 03:19:10黃偉鳳黃積佰劉慶庭
農(nóng)機化研究 2020年2期
關(guān)鍵詞:振動
武 濤,黃偉鳳,黃積佰,劉慶庭
(華南農(nóng)業(yè)大學(xué) 工程學(xué)院,廣州 510642)
0 引言
馬鈴薯是我國重要的糧食作物之一。農(nóng)業(yè)部在2015年推進馬鈴薯的主糧化策略,馬鈴薯正式成為我國第四大主糧作物[1-2],并推進南方67萬hm2冬閑田馬鈴薯種植[3]。2016年,我國的馬鈴薯機收面積到達140萬hm2,機收率達24.7%[4],仍需繼續(xù)推進馬鈴薯機械化收獲。
目前,市場上的馬鈴薯收獲機主要分為固定式挖掘和振動式挖掘兩種[5-7]:前者結(jié)構(gòu)簡單,但在南方黏濕土壤作業(yè)環(huán)境下會遇到挖掘阻力大和土壤擁堵的問題;振動式挖掘采用振動原理改變土壤顆粒的加速度和慣性力,加速土體的破壞,可以大大減小挖掘阻力[8-9]。
針對振動減阻挖掘技術(shù),國內(nèi)外開展了系列研究。W. S. Kang[10]等設(shè)計了3種不同的振動挖掘鏟,以振動幅度、凸輪轉(zhuǎn)速和前進速度為因素對比研究振動挖掘的土壤分離效果。K.A.J.Al-Jubouri[11]等在前進速度為3km/h、挖掘深度200mm、振動幅度10~25mm和振動頻率7.5~18Hz的條件下進行田間試驗,結(jié)果表明:相比固定式挖掘,振動挖掘能夠有效地降低挖掘阻力并提高馬鈴薯的收獲質(zhì)量。王雪艷[12]就振動深松技術(shù)以強迫和自激振動兩種方式研究激振頻率和激振振幅對牽引阻力的影響效果。樊英生[13]等設(shè)計并試制了4UD-600型馬鈴薯挖掘機,可實現(xiàn)挖掘機的振幅和入土角可調(diào)。石林榕[14]借助虛擬樣機技術(shù)軟件Adams和非線性有限元軟件Ls-Dyna相結(jié)合法模擬小型馬鈴薯挖掘機振動挖掘鏟挖削土壤過程,并采用回歸方程計算出最優(yōu)牽引力時的牽引速率、振動頻率、振動幅值和入土角。呂金慶[15]等開展基于4U1Z型振動式馬鈴薯挖掘機的作業(yè)速度、振動分離篩角和振動頻率對馬鈴薯收獲效果的研究。眾多研究表明:合理調(diào)整振動裝置的結(jié)構(gòu)與運動參數(shù)是振動減阻挖掘的關(guān)鍵所在,但工作部件運動參數(shù)對于振動挖掘阻力的確切影響尚未明確。
針對馬鈴薯收獲過程中挖掘阻力大的問題,設(shè)計了一種馬鈴薯振動挖掘試驗臺,通過試驗研究確定了振動挖掘的關(guān)鍵運動參數(shù),以期為馬鈴薯振動挖掘收獲裝備的設(shè)計提供參考。
1 總體結(jié)構(gòu)及工作原理
1.1 總體結(jié)構(gòu)
馬鈴薯振動挖掘試驗臺主要由土槽框架、絲桿推送機構(gòu)、牽引電機、激振電機、阻力測試傳感器、速度傳感器、位置傳感器及振動挖掘機構(gòu)等組成,如圖1所示。其中,振動挖掘機構(gòu)由激振電機、平面板、漲套凸輪激振部件、魚眼桿件及挖掘鏟等組成。土槽框架正前面采用有機玻璃材料,便于對土壤擾動情況進行觀察;速度傳感器沿著土槽框架外邊線安裝在平面板上,用于測試振動挖掘機構(gòu)的前進速度;位置傳感器安裝在土槽框架兩端,防止振動挖掘機構(gòu)撞擊到土槽框架,保證作業(yè)安全。試驗臺的主要技術(shù)參數(shù)如表1所示。
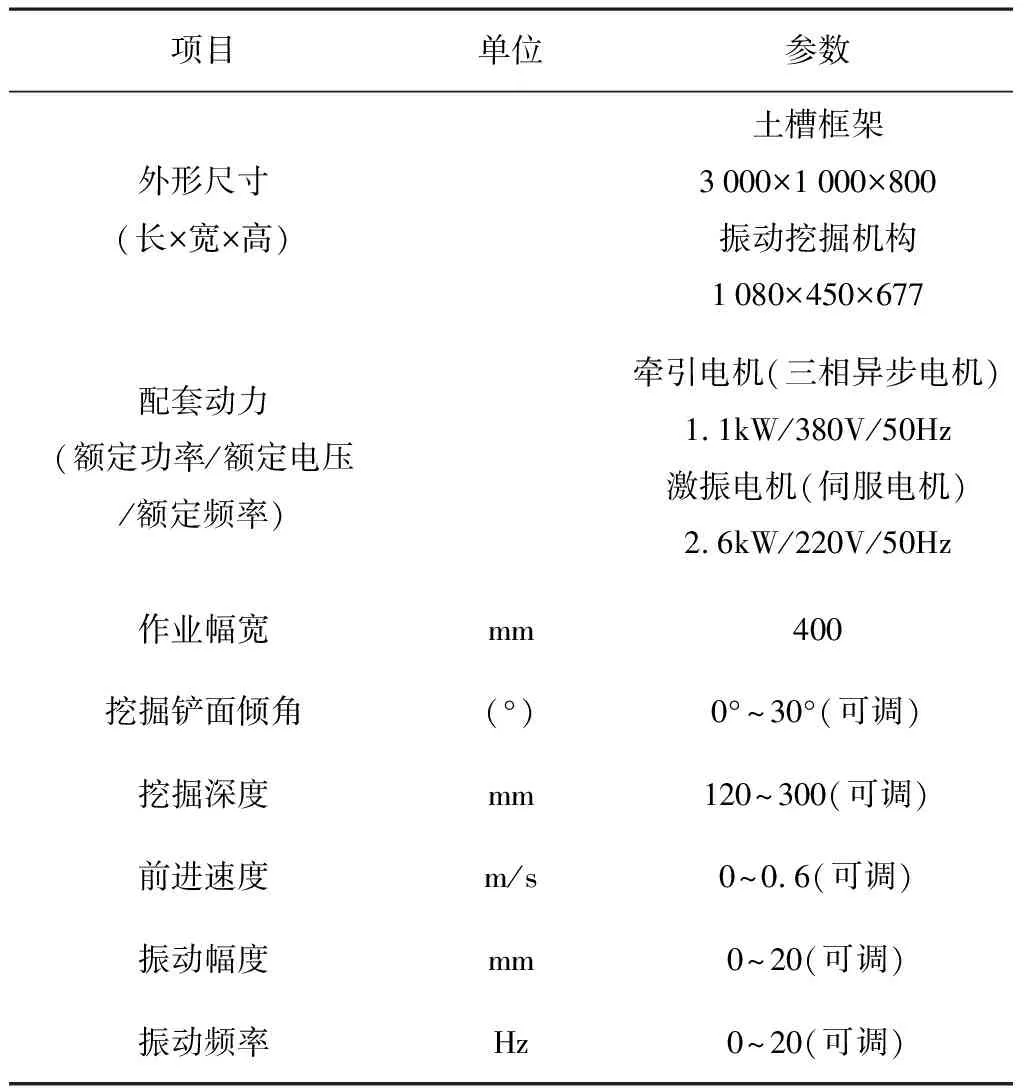
表1 馬鈴薯振動挖掘試驗臺主要技術(shù)參數(shù)
1.2 工作原理
作業(yè)時,激振電機通過傳動軸帶動漲套凸輪激振部件轉(zhuǎn)動,漲套凸輪激振部件通過魚眼桿件帶動挖掘鏟后端產(chǎn)生振動;牽引電機帶動絲桿旋轉(zhuǎn),推動整個振動挖掘機構(gòu)沿兩側(cè)滑軌向前平移;挖掘鏟在振動的同時向前運動,使壟內(nèi)土壤松動、破裂,阻力測試傳感器與電腦相連,記錄實時牽引阻力;同時,可透過土槽框架的有機玻璃可觀察作業(yè)過程中土壤的擾動情況。
通過變頻器調(diào)節(jié)牽引電機的轉(zhuǎn)速,可改變振動挖掘部件的前進速度;通過調(diào)整深度調(diào)節(jié)板和魚眼桿件的接入長度,可以調(diào)整挖掘深度;通過改變漲套凸輪的內(nèi)外漲套對齊位置,可以調(diào)整振動幅度;通過激振電機編碼器,可以調(diào)整振動頻率。
2 關(guān)鍵零部件設(shè)計
2.1 挖掘鏟設(shè)計
2.1.1 挖掘鏟結(jié)構(gòu)
為減小挖掘阻力、減輕擁堵、適應(yīng)振動挖掘,挖掘鏟采用條形鏟結(jié)構(gòu)[16-17],如圖2(a)所示。挖掘鏟以一定傾角鉸接在魚眼桿件和深度調(diào)節(jié)板上,挖掘鏟兩邊折起,后端開安裝孔,前端開可調(diào)孔位。挖掘鏟后端通過魚眼連接桿與漲套凸輪連接,前端通過深度調(diào)節(jié)板與振動挖掘部件連接,不同孔位連接,可調(diào)整不同振動方式。調(diào)整深度調(diào)節(jié)板和魚眼桿件連接長度,可調(diào)整挖掘鏟的入土深度。
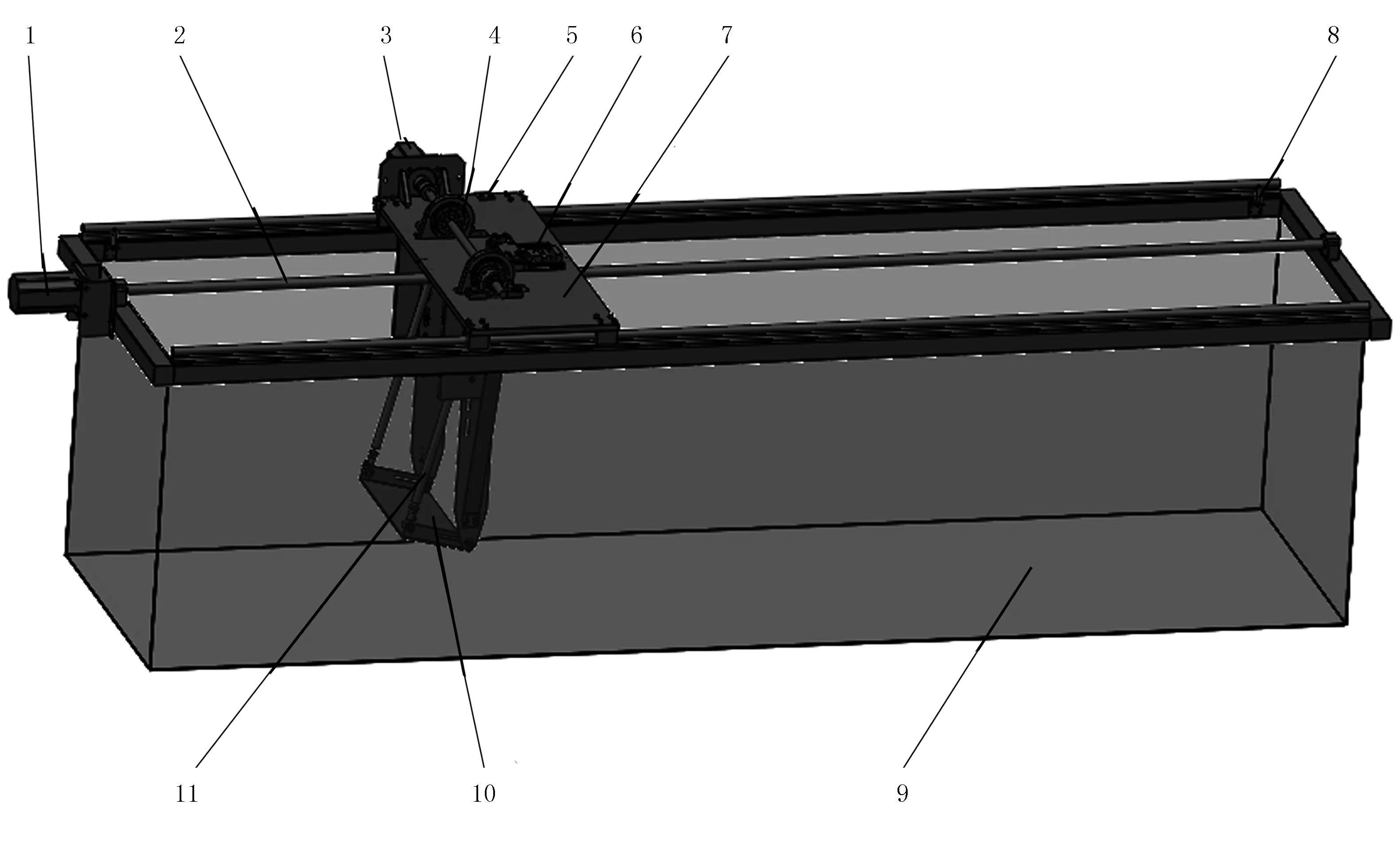
1.牽引電機 2.絲桿推送機構(gòu) 3.激振電機 4.漲套凸輪激振部件 5.速度傳感器 6.阻力測試傳感器 7.平面板 8.位置傳感器 9.土槽框架 10.挖掘鏟 11.魚眼桿件
挖掘鏟的工作原理如圖2(b)所示。工作過程中,激振電機的傳動軸將動力經(jīng)漲套凸輪傳遞到魚眼桿件,魚眼桿件帶動挖掘鏟后端規(guī)律振動;挖掘鏟刃從薯土下層切削土壤,將土壤和薯塊崛起并振松土塊,隨著挖掘鏟的的前進,薯土混合物沿鏟面向后輸送。
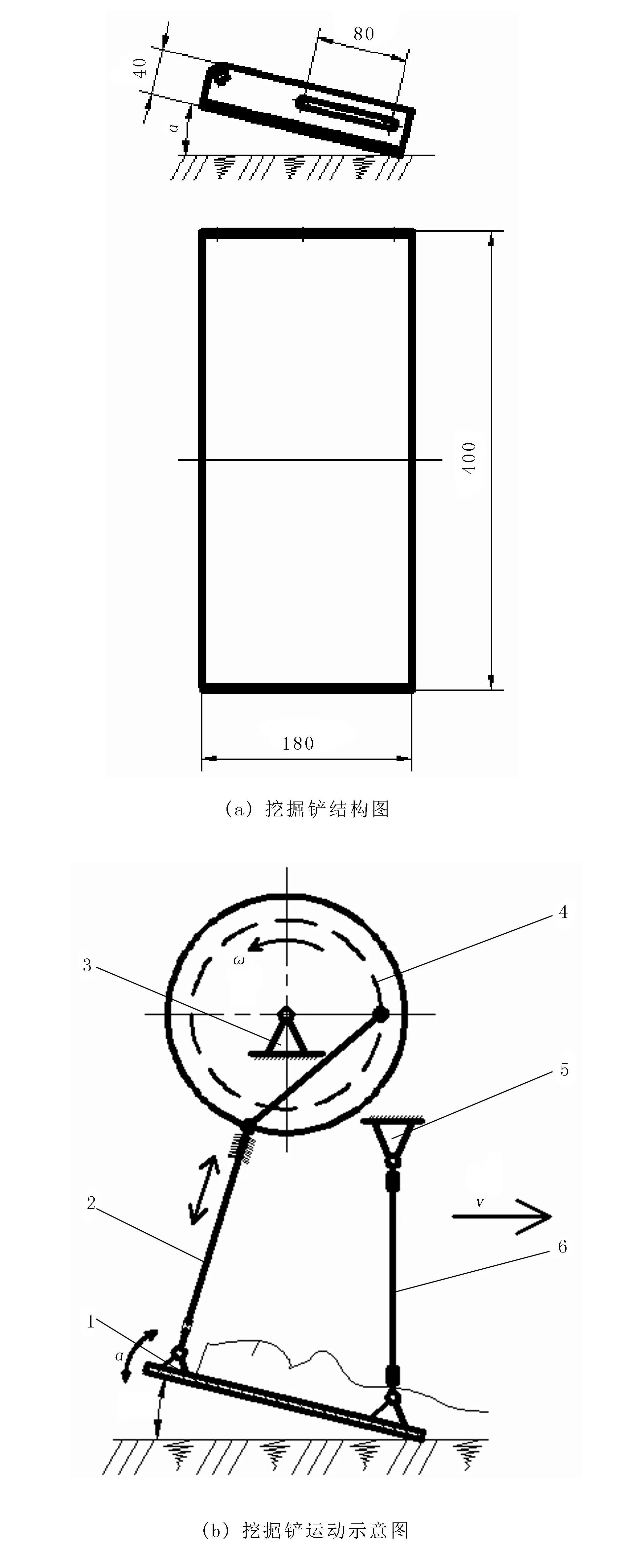
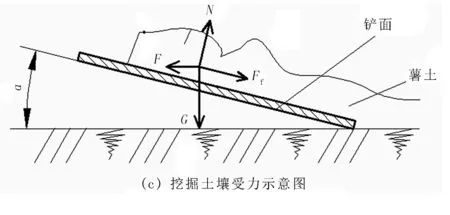
圖2 振動挖掘鏟示意圖
2.1.2 挖掘鏟參數(shù)設(shè)計
根據(jù)早期田間馬鈴薯種植情況調(diào)研發(fā)現(xiàn):南方冬種馬鈴薯(江門臺山市馬鈴薯種植基地)的種植平均壟寬為350mm,雙行種植,株距300×200mm,平均發(fā)薯深度為150mm。本試驗臺模擬單壟挖掘,即要保證挖掘鏟盡可能崛起所有薯塊,故鏟寬取400mm。挖掘鏟作業(yè)過程中,薯土經(jīng)過挖掘鏟振動作用后,向后輸送。若挖掘鏟太長,容易造成挖掘鏟面堆積土壤過多、阻力過大;挖掘鏟太短,則振動挖掘后薯土疏松效果不明顯。結(jié)合實際作業(yè)情況,取鏟長180mm。挖掘鏟兩側(cè)折起寬度需要滿足鉸接件安裝空間需求,故取40mm;可調(diào)孔位長度取80mm,保證與深度調(diào)節(jié)板有3個位置狀態(tài)的調(diào)節(jié)范圍,可調(diào)整出挖掘鏟前端無擺幅、小擺幅和大擺幅的振動狀態(tài)。鑒于冬種馬鈴薯平均挖薯深度,為保證挖掘時不傷及薯塊,故本試驗臺設(shè)定馬鈴薯挖掘深度為120~300mm可調(diào)。
挖掘鏟的傾角需要結(jié)合挖掘過程中土壤的受力情況進行分析,如圖2(c)所示。根據(jù)土壤靜力學(xué)分析可得
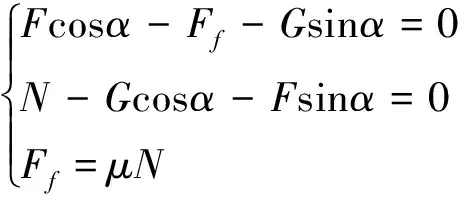
(1)
式中F—土壤對鏟面的阻力;
G—鏟面土壤重力;
N—鏟面土壤所受正向力;
Ff—土壤與挖掘鏟之間的摩擦力;
μ—土壤與鏟面摩擦因數(shù);
α—鏟面傾角。
因此,鏟面傾角α可表示為
(2)
挖掘鏟實際傾角α1<α<φ(土壤對鏟體的摩擦角)時,不會發(fā)生壅土現(xiàn)象,φ∈(22°,45°)[18]。南方冬種馬鈴薯收獲時恰逢雨季,土壤濕潤粘重,故α設(shè)定為0°~30°可調(diào)。
2.2 漲套凸輪激振部件
2.2.1 結(jié)構(gòu)及工作原理
漲套凸輪激振部件由內(nèi)漲套凸輪、外漲套凸輪、張緊套、調(diào)節(jié)螺母、魚眼桿件等組成,由轉(zhuǎn)動軸帶動,分別連接挖掘鏟后端兩側(cè),結(jié)構(gòu)如圖3所示。凸輪機構(gòu)由內(nèi)外漲套凸輪嵌合而成,內(nèi)外凸輪均為內(nèi)偏心輪,其偏心圓最薄位置開有裂縫,采用漲套原理可在一定范圍內(nèi)擴大和壓縮。在漲套凸輪外圈均勻雕上刻度,調(diào)整不同的刻度對齊便可形成不同的振動幅度。內(nèi)外漲套凸輪可在360°方向旋轉(zhuǎn)組合,在0~20mm的振幅范圍內(nèi)無極調(diào)整。
需要做調(diào)整時,調(diào)整張緊套,使其外圈直徑變小,按照振幅需求調(diào)整內(nèi)漲套凸輪位置,再調(diào)整張緊套,使其外圈直徑變大,壓緊固定現(xiàn)有漲套凸輪組合,經(jīng)過傳動軸帶動便可按設(shè)定振幅振動。
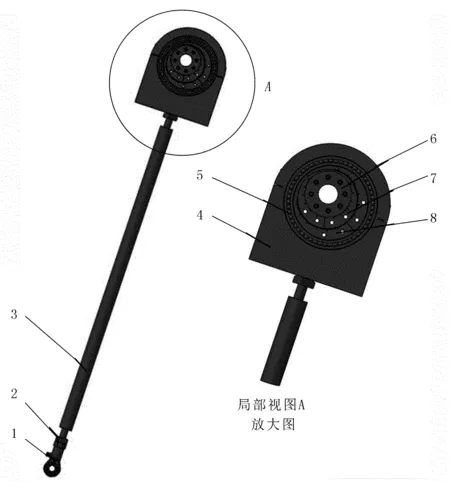
1.魚眼軸承 2.調(diào)節(jié)螺母 3.魚眼桿件 4.端蓋 5.固定軸承 6.張緊套 7.內(nèi)漲套凸輪 8.外漲套凸輪
2.2.2 關(guān)鍵運動參數(shù)的確定
前進速度、振動頻率和振動幅度是振動裝置的關(guān)鍵參數(shù),前進速度影響單位土壤在挖掘鏟上保留的時間,振動頻率直接影響單位時間內(nèi)松動的土壤量,振動幅度直接影響土壤刨起的高度,三者都會影響單位時間挖掘鏟上土壤的堆積量,從而影響牽引阻力。
為了更好地掌握合適的運動參數(shù)范圍,進行了關(guān)于前進速度、振動頻率和振動幅度的預(yù)試驗。結(jié)果發(fā)現(xiàn):牽引電機調(diào)頻器的頻率f與振動挖掘機構(gòu)前進速度v之間存在v=0.012f的關(guān)系,f可在0~50Hz之間可調(diào),即v在0~0.6m/s可調(diào)。當前進速度低于0.4m/s時,土壤容易積壓在挖掘鏟上,導(dǎo)致?lián)矶?當前進速度高于0.6m/s時,挖掘鏟前進快速而迅猛,容易導(dǎo)致土壤振動疏松不充分。因此,前進速度擬選用0.4、0.5、0.6m/s進行進一步試驗研究。當振動頻率低于8Hz時,挖掘鏟振動周期長,挖掘過程中顯得無力,阻力大,容易導(dǎo)致土壤埇堵,難以繼續(xù)前進作業(yè);當頻率高于16Hz時,挖掘鏟振動周期短,振動劇烈,整個振動裝置極易處于不穩(wěn)定狀態(tài),挖掘過程中容易導(dǎo)致土壤顆粒四濺,不利于作業(yè)。因此,振動頻率擬選用8、12、16Hz進行進一步的試驗研究。當振動幅度低于5mm時,挖掘鏟振動效果不明顯,高于15mm時,土壤被提升的高度大,擾動情況劇烈,不利于穩(wěn)定作業(yè)。因此,振動幅度擬選用5、10、15mm進行進一步的試驗研究。
2.3 牽引阻力測試裝置
測試裝置的牽引阻力由阻力測試傳感器進行測量。測試裝置包括阻力測試傳感器、安裝組件及計算機等,如圖4所示。

1.平面板時性 2.絲桿 3.T形塊 4.安裝滑軌 5.阻力測試傳感器 6.擋板
安裝組件由安裝滑軌、T形塊和擋板組成,連接絲桿牽引機構(gòu)和平面板,測試裝置主要實現(xiàn)牽引阻力的實時數(shù)據(jù)采集、顯示和存儲等功能。
試驗前,對空載下的阻力傳感器進行初始化設(shè)置,逐漸加載,設(shè)置傳感器的量程,并校核精度。完成校核后,將阻力測試傳感器安裝在安裝組件上,起到連接絲桿牽引機構(gòu)與振動挖掘部件的中間媒介作用,用以測試絲桿牽引機構(gòu)帶動振動挖掘部件前進的牽引阻力。阻力測試傳感器的接收器與計算機對接,完成信號的接收和通訊。
3 試驗結(jié)果與分析
3.1 材料與試驗條件
試驗于2018年3月15日在華南農(nóng)業(yè)大學(xué)土槽實驗室內(nèi)進行。土壤質(zhì)地為沙壤土,含水率為23%,土槽中土壤的高度為400mm。
主要儀器為SG-HF數(shù)顯式推拉力計(測試量程0~20kN,校核后使用量程3kN,測量精度0.01N)。土槽試驗如圖5所示。

圖5 土槽試驗
3.2 試驗方法
前期單因素試驗觀察和理論分析表明,影響牽引阻力的主要因素有前進速度A、振動頻率B、振動幅度C。為明確上述3個因素對馬鈴薯挖掘作業(yè)時牽引阻力的影響,本試驗以牽引阻力F作為衡量標準,采用L9(33)正交試驗表進行正交試驗。試驗因素和水平如表2所示,正交試驗方案與結(jié)果如表3所示。
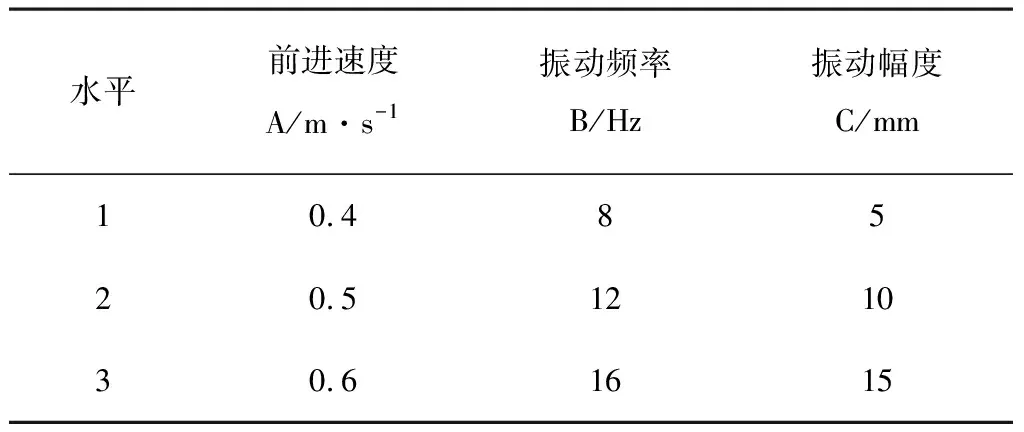
表2 正交試驗因素水平表
根據(jù)馬鈴薯振動挖掘試驗臺單壟作業(yè)牽引阻力測試的實際情況,試驗時壓實土壟,調(diào)整挖掘鏟的入土深度為180mm;調(diào)整振動幅度,在電子屏幕輸入所需振動頻率,在調(diào)頻器上調(diào)到所需速度對應(yīng)的頻率;在計算機同步測力軟件中新建牽引阻力實時測試項目,然后啟動激振電機,穩(wěn)定后啟動牽引電機,實時記錄振動挖掘過程中的牽引阻力值。每個因素組合方案進行3次重復(fù)試驗,分別測試每次試驗牽引阻力F,并取平均值。
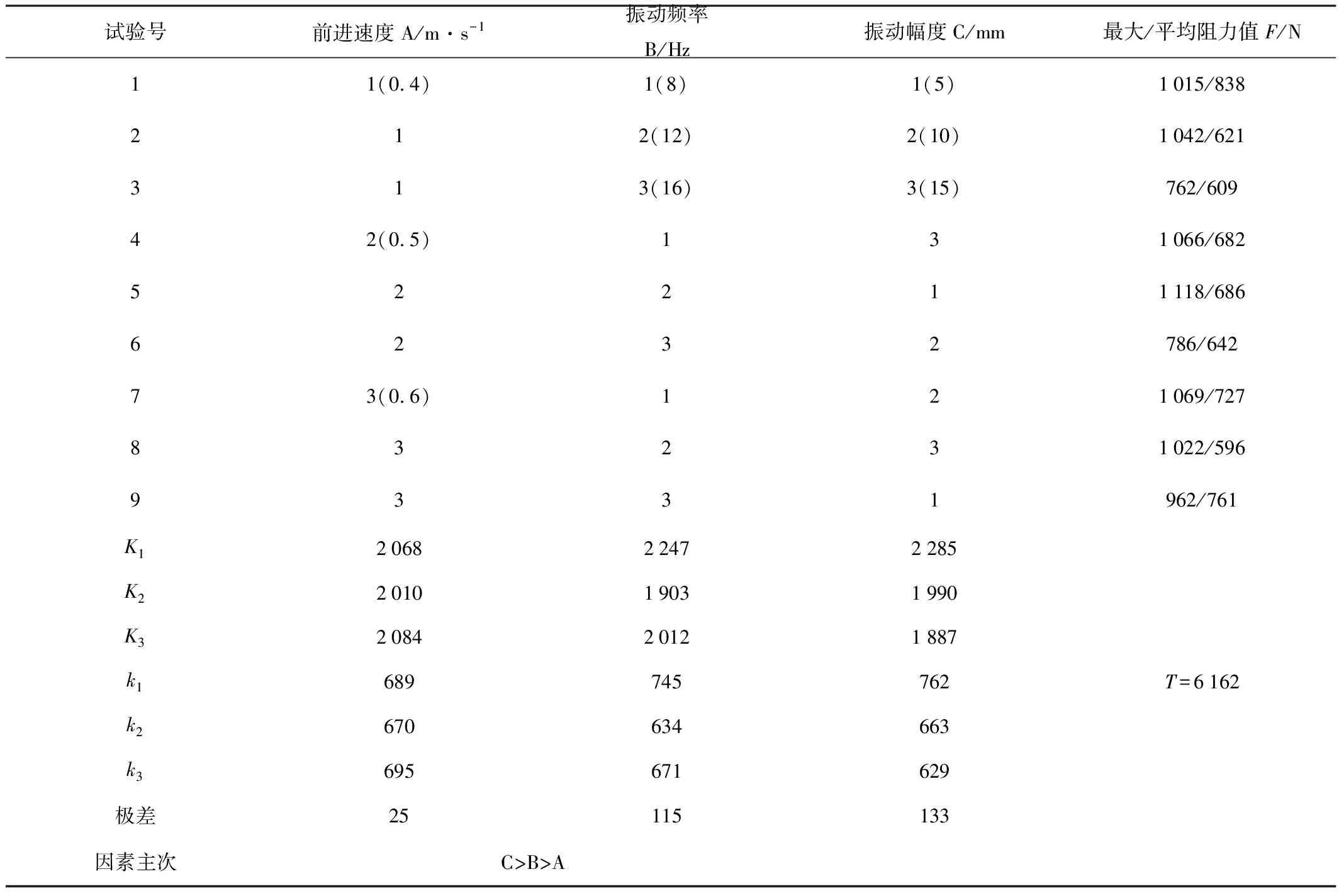
表3 試驗方案與結(jié)果分析
K1、K2、K3代表各因素列對應(yīng)水平(1,2,3)的數(shù)據(jù)之和,k1、k2、k3代表各水平數(shù)據(jù)的綜合平均值。
3.3 試驗結(jié)果與分析
本試驗采用IBM SPSS Statistics 19 軟件進行數(shù)據(jù)處理和統(tǒng)計分析[19]。
極差分析表明:各因素對牽引阻力影響的主次作用順序為振動幅度>振動頻率>前進速度;較優(yōu)參數(shù)組合方案為C3B2A2,即振動幅度15mm、振動頻率12Hz、前進速度0.5m/s。根據(jù)3個水平的k值作因素水平效應(yīng)圖,如圖6所示。其中,橫坐標表示各因素的水平,縱坐標表示各水平的牽引阻力平均值。
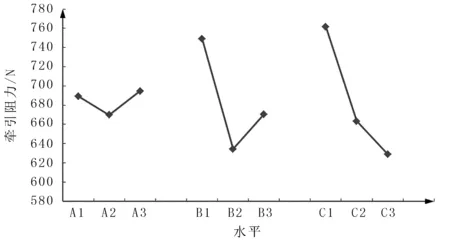
圖6 因素水平效應(yīng)圖
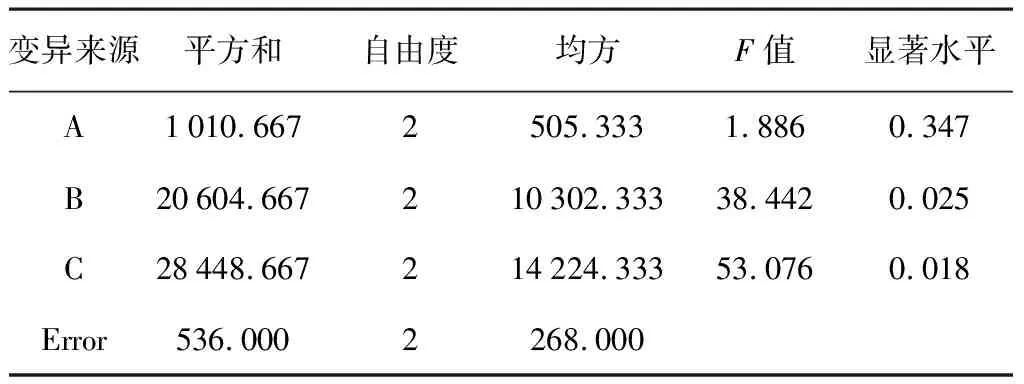
表4 正交試驗方差分析
由表4可知,3個因素對牽引阻力的影響程度不同。在95%的置信度下,對于牽引阻力指標,振動幅度影響顯著,振動頻率影響較為顯著,前進速度影響不顯著。
3.4 試驗驗證
由于正交試驗方案未包含較優(yōu)參數(shù)組合方案,為確保試驗分析結(jié)果可靠性,選取上述較優(yōu)參數(shù)組合C3B2A2進行試驗驗證。為消除隨機誤差,進行3次重復(fù)試驗,取平均值為試驗驗證值,試驗結(jié)果為594N。通過對比分析可知,優(yōu)選后的牽引阻力小于其他參數(shù)下的阻力值。因此,機構(gòu)設(shè)計時推薦采用較優(yōu)組合參數(shù),即振動幅度15mm、振動頻率12Hz、前進速度0.5m/s。
為驗證振動挖掘牽引阻力與平動挖掘的效果區(qū)別,設(shè)置了對比試驗。采用較優(yōu)組合參數(shù)C3B2A2做平動試驗,即選取前進速度以0.5m/s,振動頻率、振動幅度均為0進行試驗,求取3次試驗平均值,試驗結(jié)果為736N。綜上所述,最佳振動參數(shù)下牽引阻力比平動下牽引阻力減小19%。
4 結(jié)論
1)針對馬鈴薯收獲過程中牽引阻力大的問題,設(shè)計了可調(diào)式馬鈴薯振動挖掘試驗臺,主要包括土槽框架、絲桿推送機構(gòu)、振動挖掘機構(gòu)及阻力測試裝置等。同時,設(shè)計了振動挖掘鏟和漲套凸輪激振部件,可實現(xiàn)前進速度、振動幅度、振動頻率、挖掘深度和入土角度的參數(shù)調(diào)整,從而為馬鈴薯挖掘設(shè)備設(shè)計提供試驗基礎(chǔ)。
2)漲套凸輪激振部件采用兩個雕刻有刻度的漲套凸輪嵌合,并搭配張緊套連接,可360°轉(zhuǎn)動配合,在0~20mm振動幅度范圍內(nèi)無級調(diào)整,提高了馬鈴薯振動挖掘部件振動幅度調(diào)整精度。
3)正交試驗結(jié)果表明:影響振動挖掘牽引阻力的主次作用因素依次為振動幅度、振動頻率、前進速度。當振動幅度為15mm、振動頻率為12Hz、前進速度為0.5m/s時,振動牽引阻力達到最小值594N,比0.5m/s時平動挖掘牽引阻力減少19%。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(理學(xué)版)(2014年3期)2014-03-01 04:21:00
