個性化割草機器人外觀設計研究
2020-10-17 03:19:22劉力
農機化研究 2020年2期
劉 力
(常州機電職業技術學院,江蘇 常州 213164)
0 引言
隨著園林藝術產業的技術進步,多樣化的割草修整機器不斷涌現。在戶外智能移動機器人產業,個性化的割草機器人的出現大大降低了人工勞動力,提升了作業效率。近年來,機器人的設計融合了先進的計算機控制技術、抗干擾技術及行為分析原理等,相關學者采用先進的傳感識別與控制方法和核心控制算法,致力于研究其內部控制結構及行為規劃策略,但針對其外觀設計研究較少。為此,筆者在借鑒相關研究成果的基礎上,從采摘機器人的外觀協調性與合理性角度進行設計研究。
1 工作原理及組成
個性化割草機器人的工作原理源于傳統的割草機器。圖1為目前國內外常見的個性化割草機器人外觀簡圖,其特點在于將人工控制代替為電源驅動,各執行部件在相互協調配合下實現自動化、智能化的割草作業。表1為個性化割草機器人核心部件及參數列表。其中,電子籬笆長度主要實現工作區域與邊界區域的識別與控制行程控制。
結合割草機器人的工作原理及核心部件參數,繪制如圖2所示的個性化割草機器人作業運動原理簡圖。
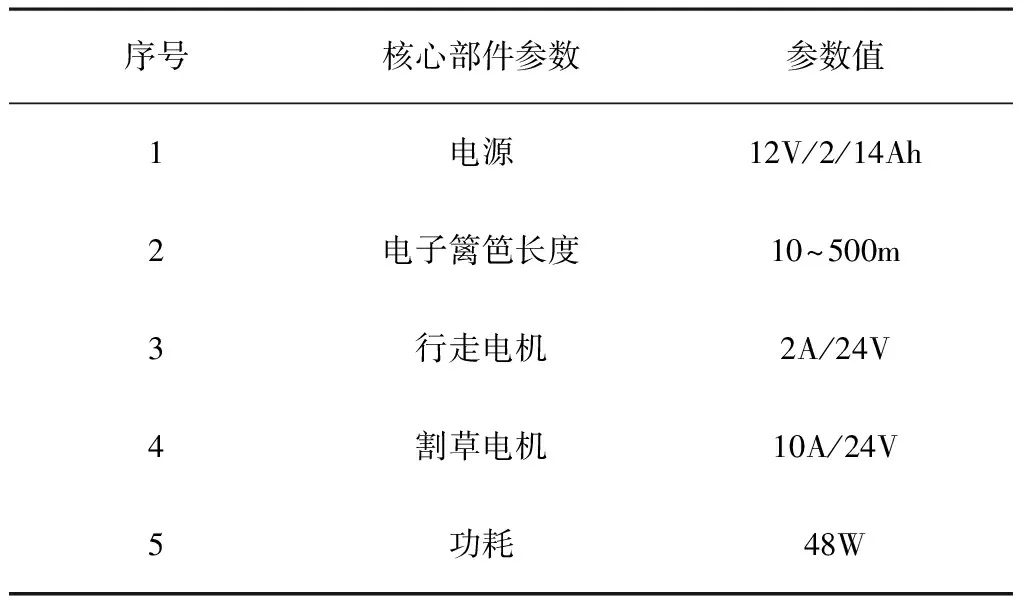
表1 個性化割草機器人核心部件及參數
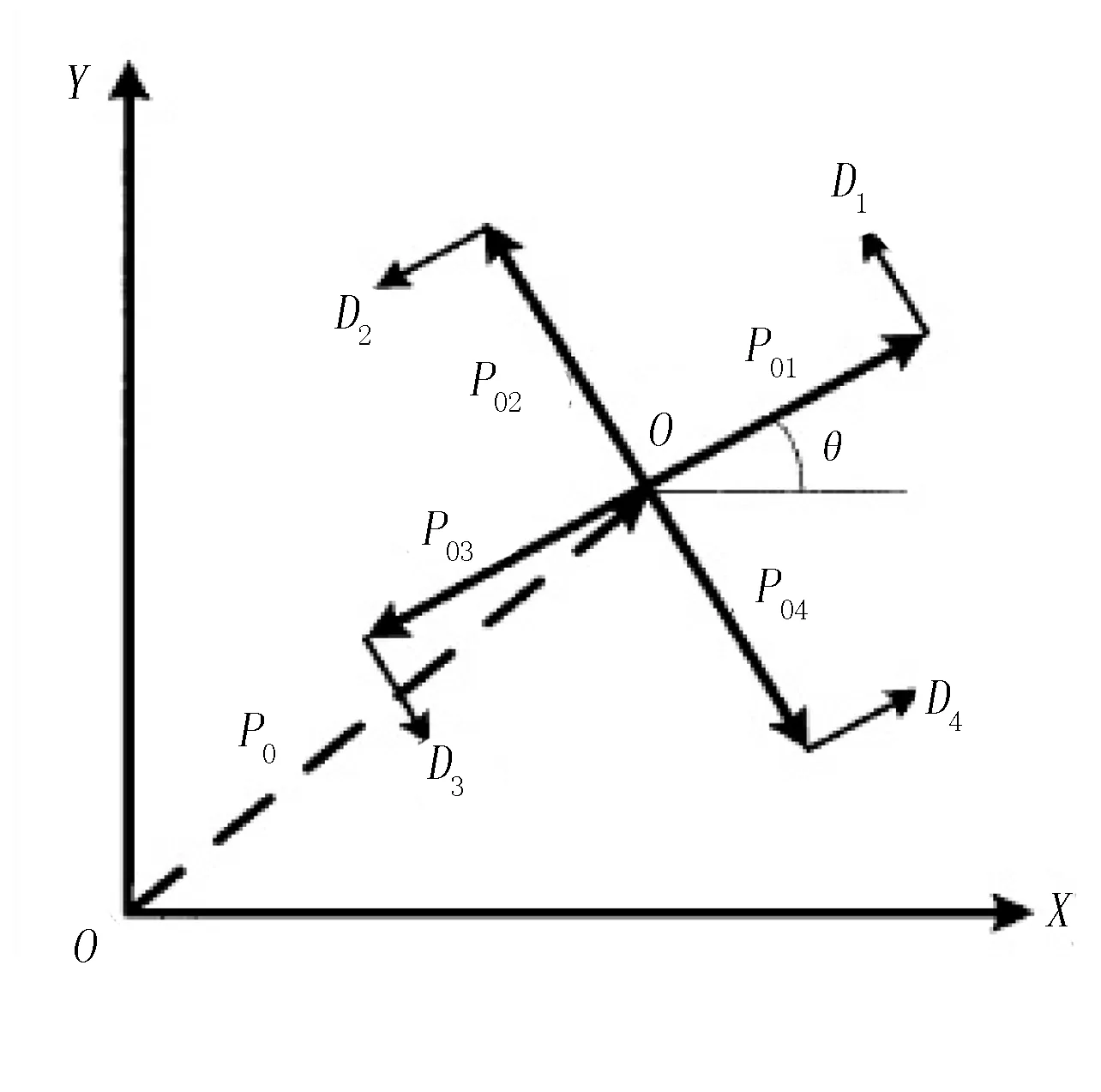
圖2 個性化割草機器人作業運動原理示意圖
圖2中,以逆時針方向為正,進行行走和割草作業,可得出如下運動關系,即
(1)
(2)
(3)
式中R(θ)—割草機器人轉向系統矩陣;
P0i—割草機器人各個輪軸的中心位置向量;
L—割草機器人驅動機構至中心的距離;
Di—割草機器人直流電機驅動方向位置向量。
2 外觀設計分析
2.1 理論模型建立
針對個性化割草機器人外觀設計要求,進行結構及外觀信息捕捉。考慮各割草作業環境的多變性因素,通過圖像處理關鍵技術進行場景渲染,實現割草機器人個性化外觀建模,如圖3所示。以加權平均算法為理念,得出外觀圖像F設計理論模型為
F(m,n)=ω1A(m,n)+ω2B(m,n)
(4)
式中m—割草機器人個性化外觀圖像處理像素行序列;
n—割草機器人個性化外觀圖像處理像素列序列;
ω—割草機器人個性化外觀圖像處理加權系數。
進一步采用圖像轉換的INS、GRB-HIS方法,其整機結構模型融入到個性化割草機器人的外觀設計考慮因素,且同時進行外觀顯示質量檢測環節,最終得到外觀圖像的協調性理論模型為
(5)
(6)
式中V1、V2—選定坐標系下的橫、縱軸;
I—外觀顯示亮度,選定坐標系下的z軸;
H—外觀顯示色度;
S—外觀顯示飽和度;
R、G、B—外觀顯示基礎顏色色域。
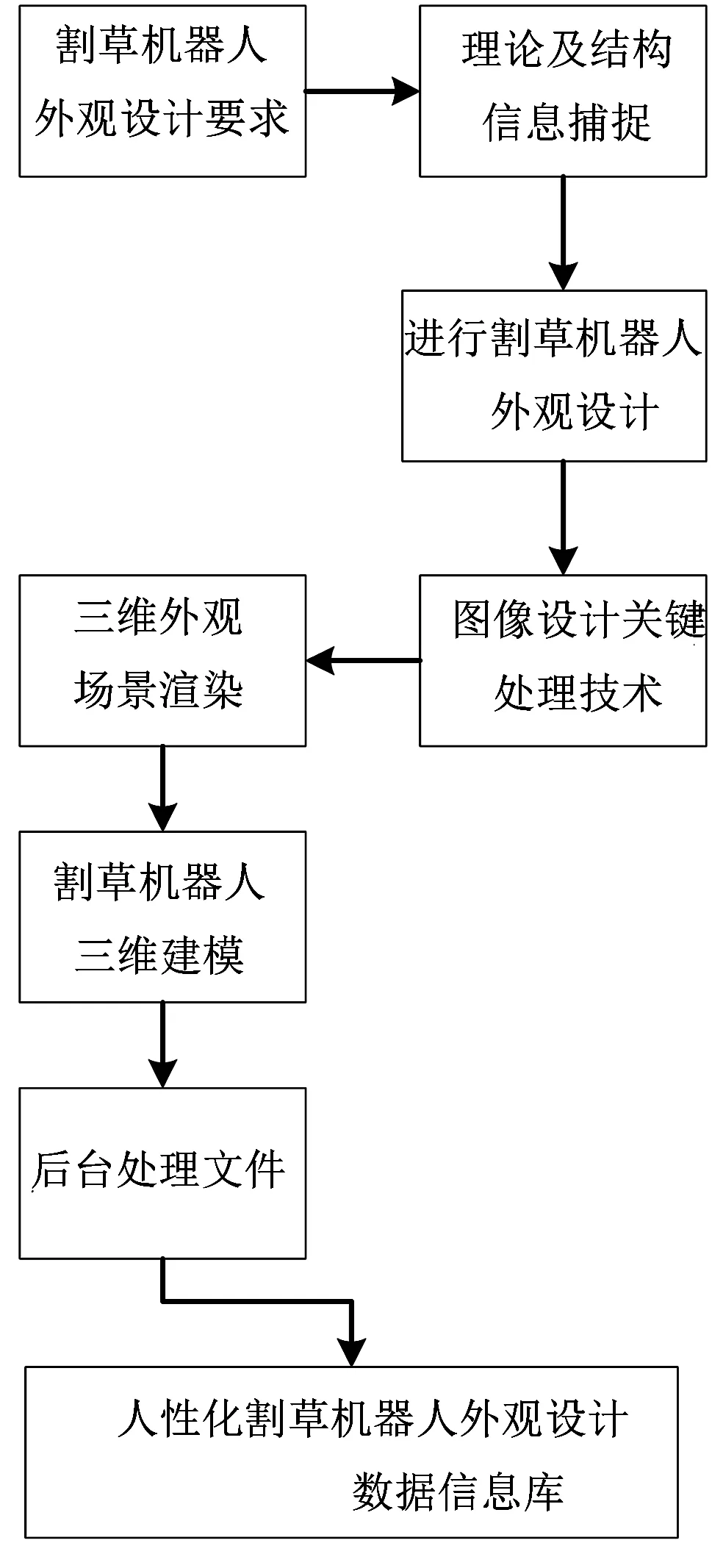
圖3 個性化割草機器人圖像處理與外觀設計框圖
2.2 結構模型建立
個性化割草機器人的結構模型建立合理與科學是進行外觀設計的必要前提。圖4為該機器人的結構組成及控制簡圖,主要基于多傳感控制系統、單片機控制系統和電機驅動控制系統三大模塊及感應、處理、控制驅動目標進行設計布局,還包含附屬的邊界檢測、復位指令、實時顯示、無線通信等功能實現。
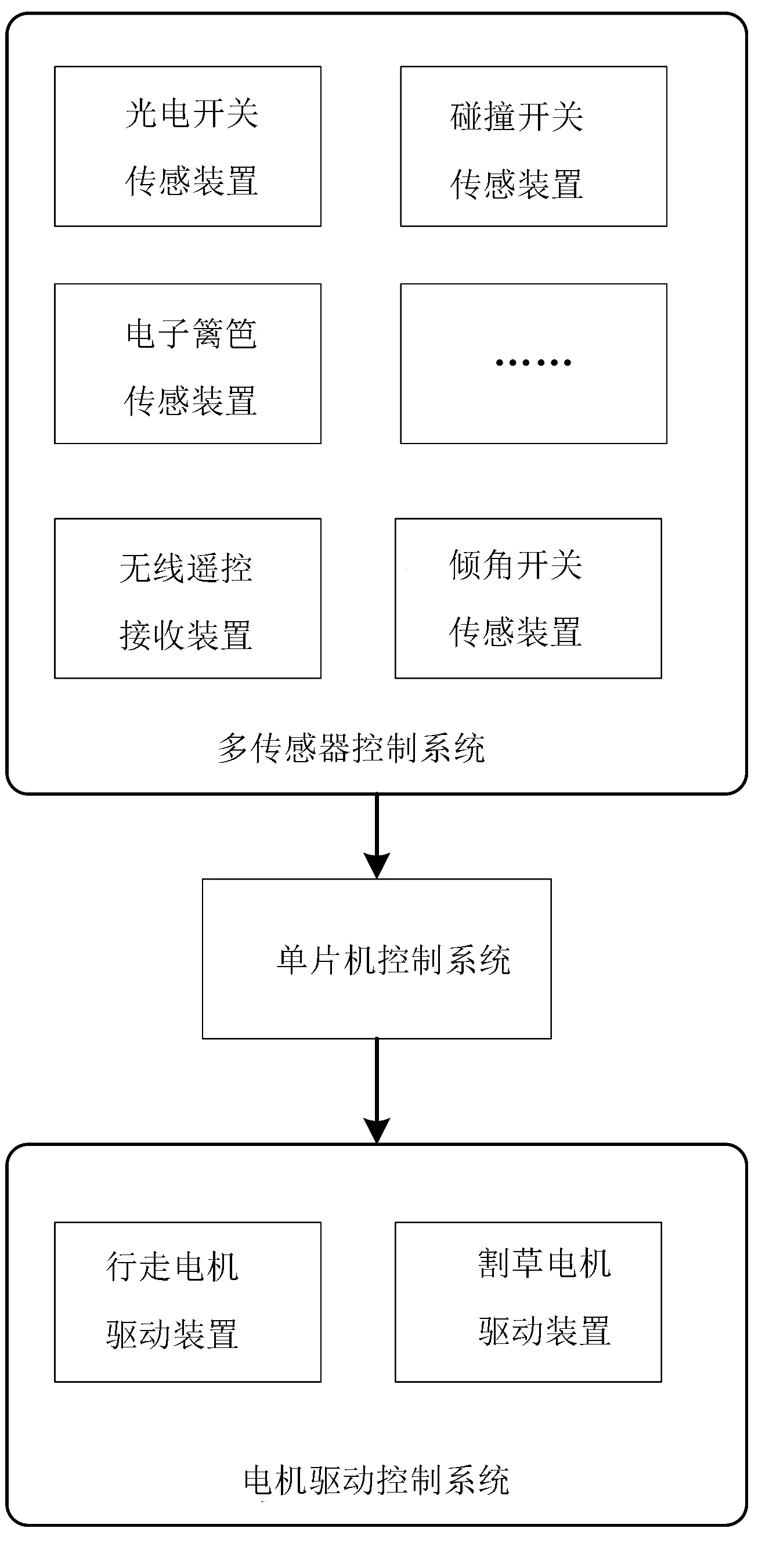
圖4 個性化割草機器人的結構組成及控制簡圖
針對該割草機器人的作業環節,其具體作業行為功能分配如表2所示。路徑的識別與避障是割草機器人感知的主要功能,定位、邊界識別與轉向控制則共同構成了個性化割草機器人的內部動作感知;進行割草作業環節則由割草動作執行部件完成,包含識別作業區域與邊界區域的準確度策劃。

表2 個性化割草機器人作業行為功能分配
2.3 結構與外觀協調分析
結構與外觀的協調性分析可實現割草機器人的個性化與智能化設計,外觀的形象設計常規應預先在專業軟件中模擬處理。割草機器人的結構設計模型主要從工藝與尺寸的角度出發,為得到最優化的設計配置,對于已生成的結構模型文件格式轉換須考慮在內。據此設計出基于協調性的個性化割草機器人外觀設計流程(見圖5),將割草機器人的前結構模型按照一定規則導出為外觀設計模型,進行結構模型與設計模型的互為調整,最終通過一定的比例核心控制算法程序整合為個性化割草機器人協調性的外觀模型。

圖5 基于協調性的個性化割草機器人外觀設計流程簡圖
結構與外觀的轉換與協調,關鍵在于進行設計的處理方法與步驟的選取,具體內部設計處理流程如圖6所示。割草機器人的外部結構與設計快速成型基于STL模型和相應的達標分析過程共同實現,從點云的前期處理、數據采集達到割草機器人的曲面造型設計,根據后臺輸入運行的三維設計程序可得出可視化的三維實體造型,實現直觀觀察比例協調性、構件布局合理性目標。
外觀設計環節中,依次進行特征輪廓線的形成、外觀尺寸比例的放縮變形處理、細化節點、拐點的圖像顯示等,得出個性化割草機器人的整體三維外觀模型。此處經正側曲線擬合處理,給出該割草機器人的外形輪廓程序指令片段如下:
…
common ppiuor line spots( )
{
ppiuor ps=fresh ppiuor( );
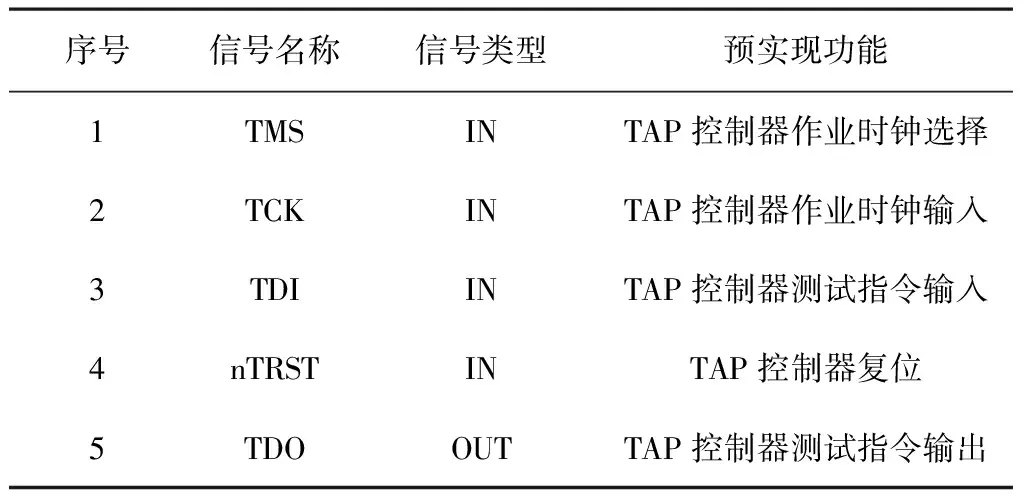
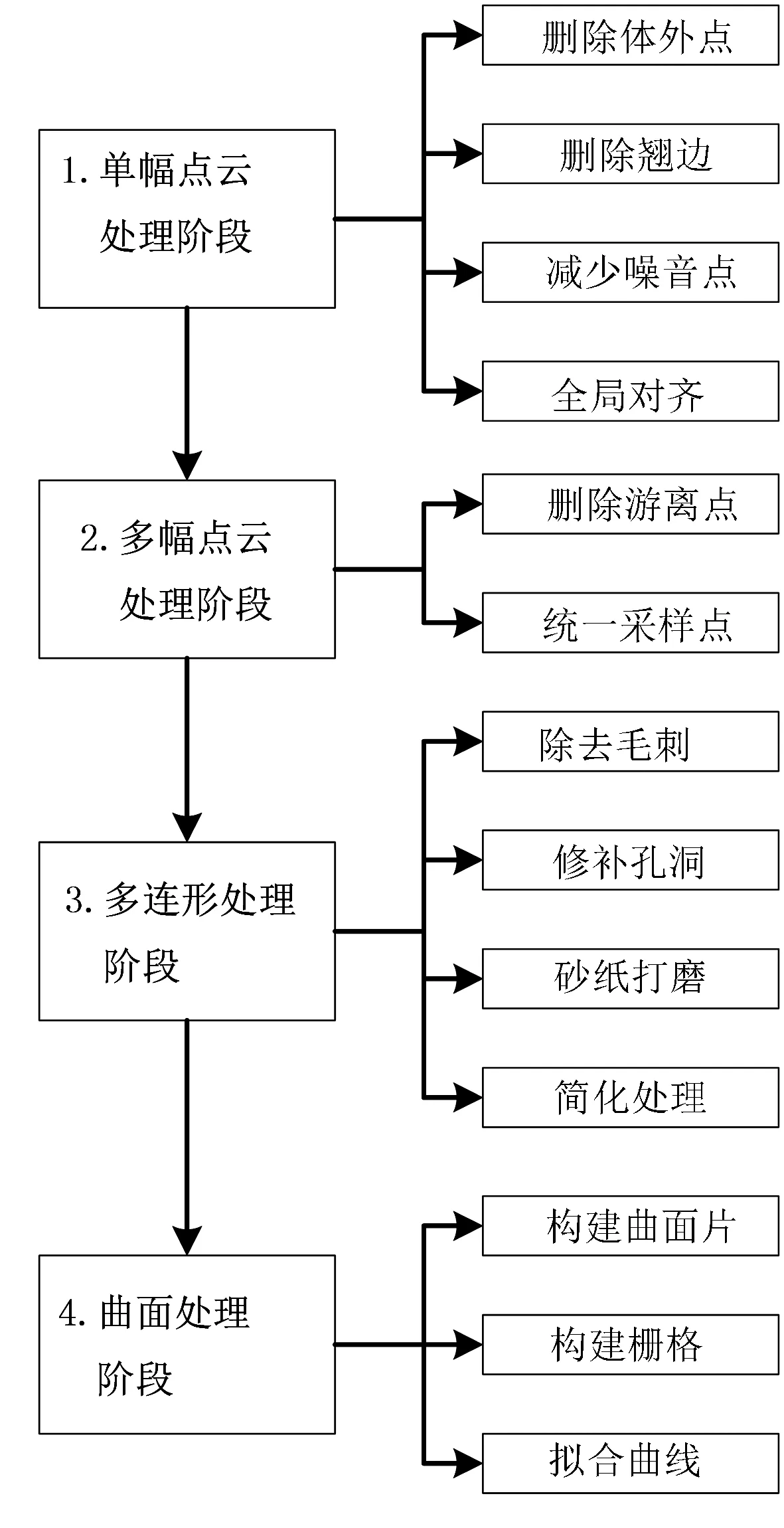
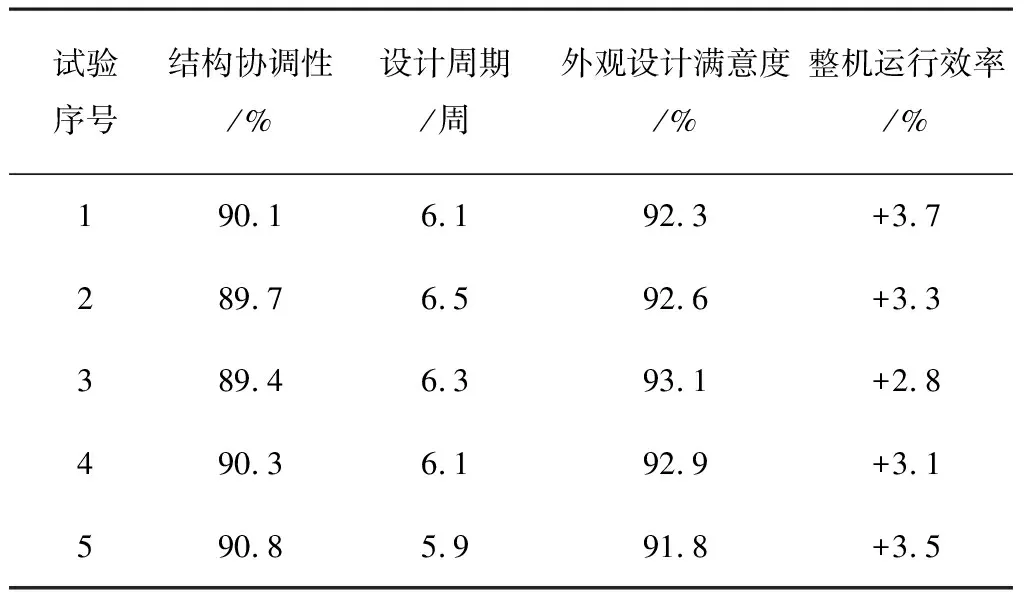
for(integer i=0; i { integer k=1; integer targain, targain0; Do { targain=k*enwordr W+i; targain0= targain- enwordr W; k++; } when (arith.abs(dig Dst[targain]- dig Dst[targain0] if(k== enwordr H) carry on; rest{needle p=fresh needle(i,k); ps.plus(p);} } setting ps; } … 圖6 個性化割草機器人外觀設計主要處理流程 進行個性化割草機器人設計試驗,以人性化和可操作性為目標,進行信號參數設置(見表3),主要實現TAP控制器的選擇、測試、復位等。同時,設置主要試驗條件:①建模符合實際結構尺寸;②曲面造型特征線提取連續平滑;③結構與外觀設計銜接符合功能要求等。 表3 個性化割草機器人結構與外觀協調性設計試驗信號參數設置 對試驗數據相應處理換算后,得到如表4所示的效果評價表。由表4可知:整體測試運行效率較外觀設計優化前提升2.8%以上。同時,個性化割草機器人的整機設計約為6周條件下,其結構協調性保持在89.4%以上,此時整機的外觀設計滿意度保持在91.5%以上,設計合理有效。 圖7 個性化割草機器人外觀設計試驗過程操作步驟實現圖 個性化割草機器人外觀設計試驗后,得出如圖7所示的實現設計外觀的標準化操作步驟。該步驟整體分為單幅點云處理、多幅云處理、多邊形處理及曲面處理4個階段,每個階段可具體細化,最終經刪除、修改、修補、構建、擬合后得到用戶滿意度較高的個性化割草機器人設計外型。 表4 個性化割草機器人外觀設計試驗效果評價 1) 通過理解割草機器人的工作原理及部件組成,分析結構設計模型與外觀設計模型之間協調性關系,并利用圖像處理融合技術進行個性化割草機器人外觀設計試驗。 2) 試驗結果顯示。個性化割草機器人的整機設計約為6周條件下,整體測試運行效率較外觀設計優化前提升2.8%以上,設計合理。 3) 經個性化割草機器人外觀設計研究,得出進行外觀設計的標準化操作步驟,提升了割草機器人外型整機滿意度,且穩定在91.5%以上。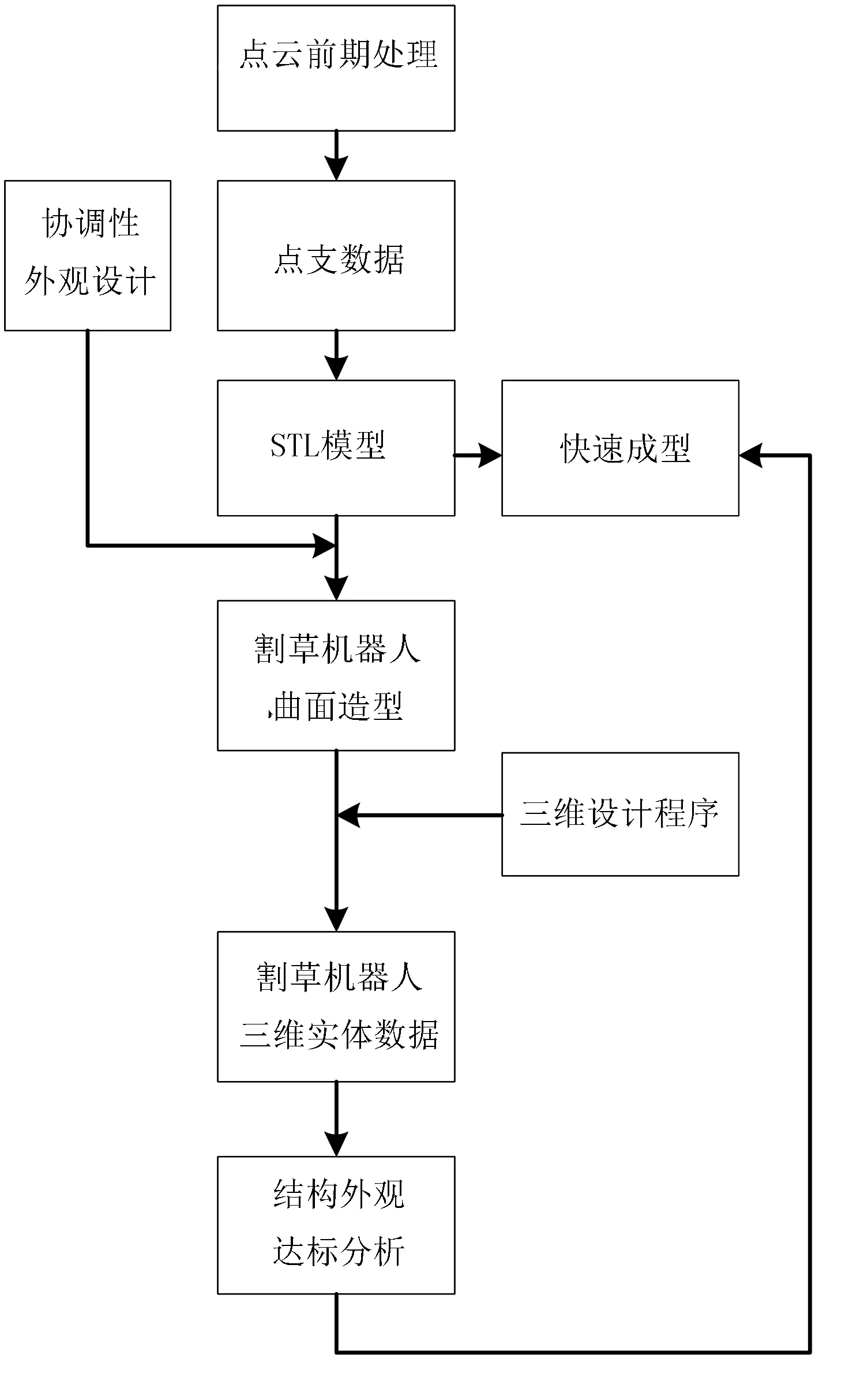
3 外觀設計試驗
3.1 條件設置
3.2 過程分析
4 結論
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34少年博覽·初中版(2020年6期)2020-06-12 11:42:23中華詩詞(2019年7期)2019-11-25 01:43:04中國知識產權(2018年9期)2018-09-18 02:54:52知識產權(2016年7期)2016-12-01 07:00:50影視與戲劇評論(2016年0期)2016-11-23 05:26:01故事大王(2016年7期)2016-09-22 17:30:08中國陶瓷工業(2015年4期)2016-01-05 11:48:06現代企業(2015年9期)2015-02-28 18:56:50兒童故事畫報(2013年3期)2013-06-24 05:40:30
