板藍根收獲機挖掘鏟的設計與有限元仿真分析
2020-10-19 01:53:58張澤璞陶桂香衣淑娟包宇恒
農機化研究 2020年12期
關鍵詞:設計
張澤璞,陶桂香,衣淑娟,包宇恒
(黑龍江八一農墾大學 工程學院,黑龍江 大慶 163319)
0 引言
板藍根是我國傳統常用中藥材,藥用價值較高[1]。目前,國內有千余家制藥企業以板藍根為主要原料生產的中成藥、西藥、中藥飲片就超過2000多種,且醫藥市場對板藍根的需求量每年都在以15%以上的速度遞增,可見其作為藥材栽培種植的經濟市場潛力[2];但是其收獲方式相對落后,主要靠人工挖掘收獲為主,勞動量大,工作效率低[3]。因此,開展板藍根機械化收獲和收獲關鍵技術的研究是迫切需要的。挖掘鏟是板藍根收獲機的重要組成部分,其形態結構、幾何參數直接影響整機性能及收獲效果。
近年來,國內學者開展了相關研究,并取得了較好效果,但都是針對于馬鈴薯、牛蒡、三七等作物。魏宏安等[4]設計的4UFD-1400型馬鈴薯聯合收獲機的挖掘鏟采用分體式三階平面組合結構,縱向剖面呈“~”形,鏟刃、鏟面和防石柵共同構成一個縱向復合曲面,提高了入土和碎土能力。呂金慶等[5]設計的4U1Z型振動式馬鈴薯挖掘機的挖掘鏟采用一體式挖掘鏟、三角鏟刃,切土效果更好,挖掘鏟兩側向上折起,避免了薯塊從挖掘鏟的兩側漏出被機器擠壓和被土壤覆蓋。呂宏靖等[6]設計的牛蒡收獲機采用了偏置的前寬后窄式挖掘鏟,不但不漏挖,牽引動力小,而且還確保了牛蒡根部的完整性及收獲效率。張丹等[7]為解決三七機械化收獲易產生的挖掘鏟前壅土問題,在不降低收獲率的前提下設計了一種由三角平面鏟和土壤破碎鏟組成的新型組合式挖掘鏟,田間試驗效果較好。目前,針對于板藍根收獲機挖掘鏟的研究尚處于起步階段,沒有完整的設計理論支撐。
為此,針對現有板藍根收獲機挖掘阻力大、鏟面易壅土、故障率高等問題,設計了一種單行振動式板藍根收獲機,并參考薯類挖掘鏟的設計,依據板藍根的農藝要求及其自身特性,對其挖掘鏟進行合理化設計,采用有限元法對該挖掘鏟進行靜力學分析,最后進行試驗驗證。
1 整機結構原理及主要技術參數
1.1 總體結構及工作原理
4UD-600型板藍根收獲機由挖掘裝置、振動分離裝置、傳動裝置及機架組成,如圖1所示。
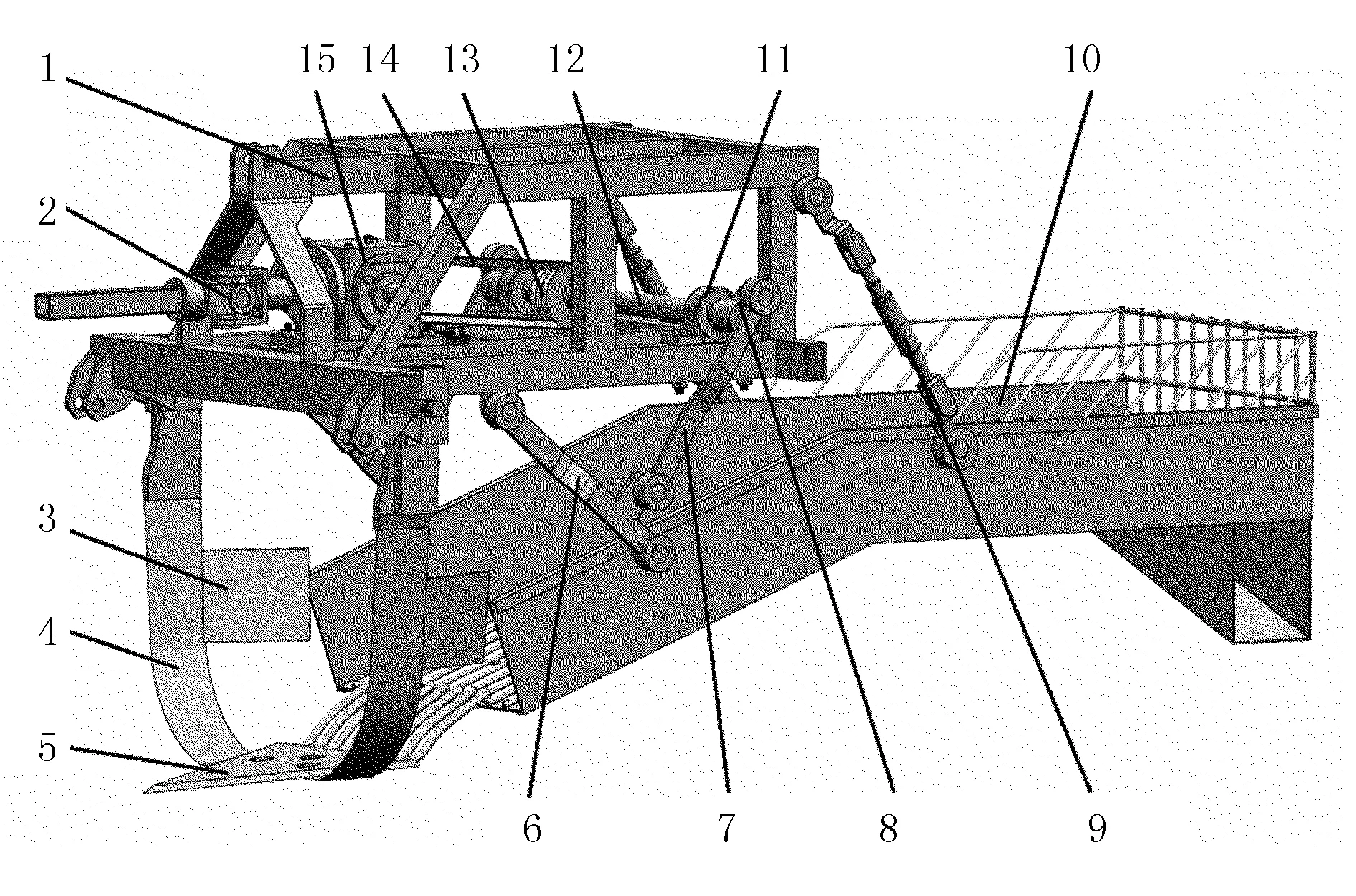
1.機架 2.萬向聯軸器 3.護板 4.側切刀 5.挖掘鏟 6.連桿Ⅰ7.搖桿 8.偏心輪裝置 9.連桿Ⅱ 10.振動分離篩11.軸承 12.軸Ⅰ 13.皮帶輪 14.皮帶 15.變速箱圖1 4UD-600型板藍根收獲機總體結構圖Fig.1 Overall structure of 4UD-600 type Isatis Root Harvester
工作原理:作業時,機架的前端位置懸掛在拖拉機上,整個機組的前進、挖掘和振動分離所需動力全部由拖拉機提供。通過鏟刀體兩側的螺栓來調節和控制挖掘深度,挖掘鏟在拖拉機的帶動下鏟入土中,側切刀切開土壤,板藍根和土壤等被挖掘鏟掘起后沿鏟面向后運動,護板起到保護作用,較小土塊從挖掘鏟后端的柵條間漏下,其余部分被送入分離篩。同時,拖拉機輸出的動力通過萬向聯軸器傳至變速箱后實現換向,利用帶傳動驅動軸Ⅰ旋轉,使偏心輪獲得一定的轉速,從而帶動搖桿運動; 搖桿的另一端鉸接在連桿Ⅰ上,而連桿Ⅰ、Ⅱ的一端鉸接在機架上,另一端鉸接在振動篩上,偏心輪、搖桿、連桿Ⅰ、連桿Ⅱ、振動篩及機架組成一個曲柄搖桿機構,使旋轉運動變為搖擺運動,從而使振動分離篩進行往復振動,將挖掘鏟輸送來的土塊振碎并由振動篩的柵條間漏下,實現土藥分離,板藍根則由振動篩尾部側向出口排出鋪放在地壟一側。
1.2 主要技術參數
根據板藍根種植的農藝要求、收獲機的生產效率和作業要求等,確定該收獲機的主要技術參數如表1所示。
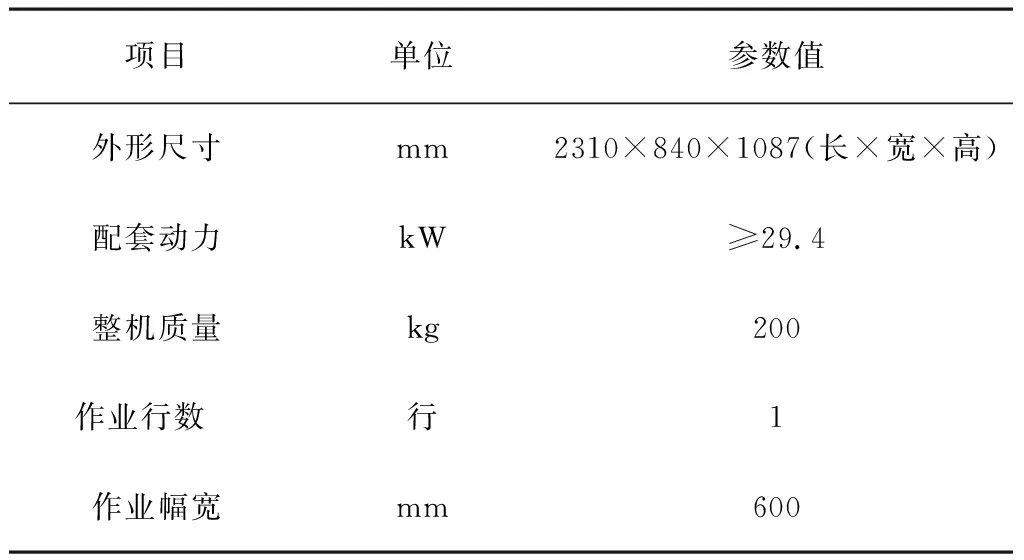
表1 4UD-600型板藍根收獲機主要技術參數Table 1 Main technical parameters of 4UD-600 type Isatis Root Harvester
2 挖掘鏟的設計及參數選取
2.1 挖掘裝置的結構及工作原理
挖掘裝置由挖掘鏟、側切刀、護板、調節螺栓及固定螺栓組成,如圖2所示。挖掘裝置通過側切刀末端的調節螺栓與機架相連接,在挖掘過程中,在拖拉機的帶動下挖掘鏟鏟入土中;隨著挖掘深度的增加,側切刀切開兩側土壤,掘出物在前方土壤的推動下經過挖掘鏟及護板的保護,使掘出的土藥混合物順利進入振動篩進行振動分離作業。挖掘裝置中挖掘鏟與側切刀的組合使用,既保證了固定式挖掘鏟結構簡單、挖掘阻力小,又克服了固定挖掘鏟易壅土、碎土能力不足等缺陷。
1.調節螺栓 2.側切刀 3.護板 4.固定螺栓 5.挖掘鏟圖2 挖掘裝置結構圖Fig.2 Structural diagram of the excavation device
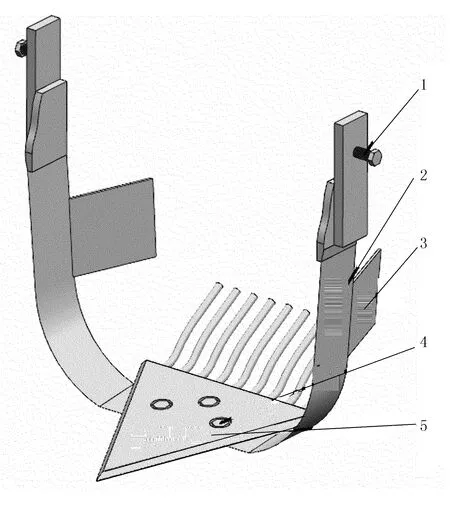
挖掘鏟由三角平面鏟及柵條組成,采用滑切方式,利用螺栓固定在側切刀上,如圖3所示。挖掘鏟后設計柵條結構,使得在挖掘過程中,一部分疏松及顆粒較小的土壤提前通過挖掘鏟后柵條間隙落下,減小挖掘阻力。在設計固定式三角平面挖掘鏟時,關鍵參數為鏟長(L)、鏟刃張角(θ)及入土角(α)。
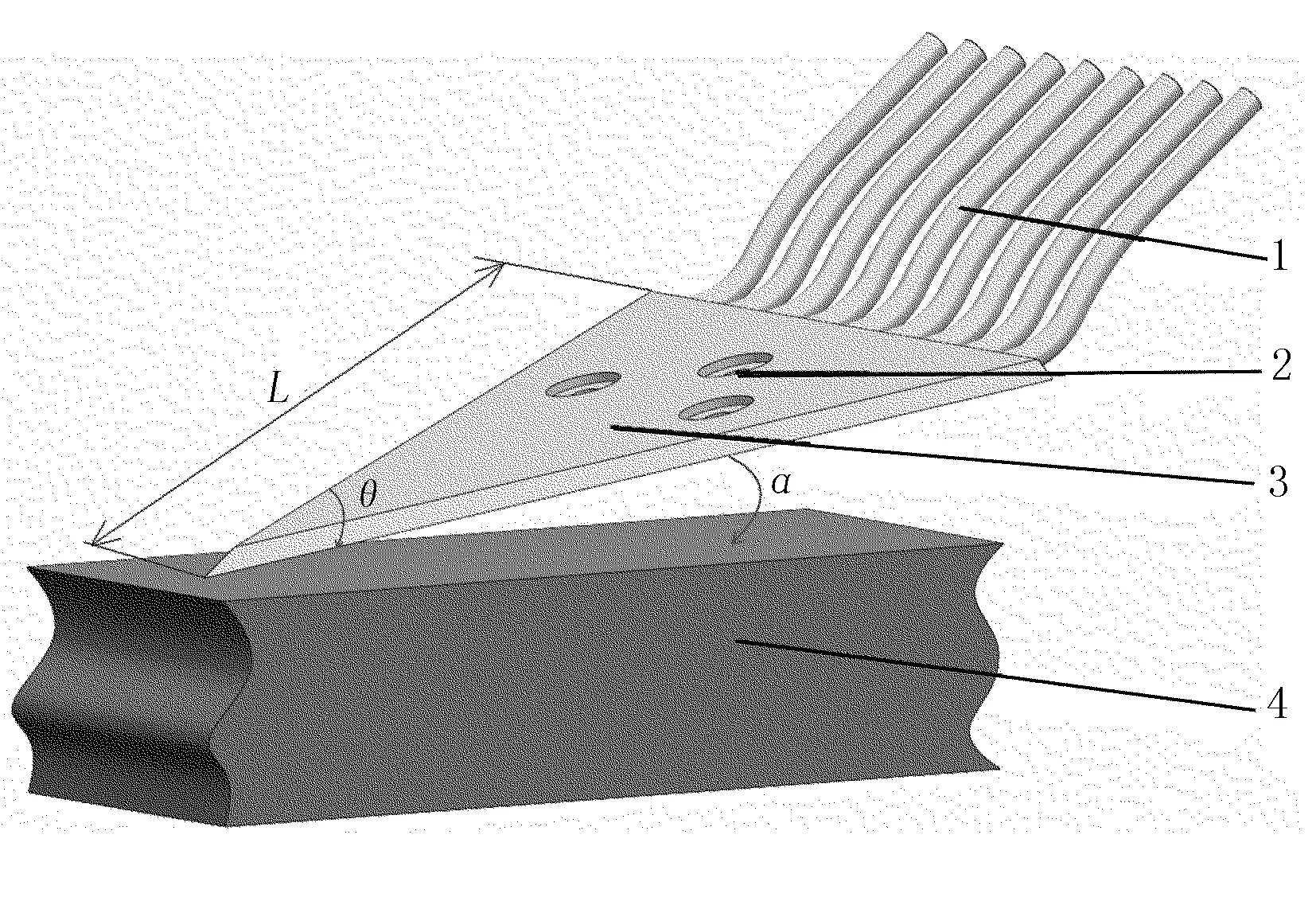
1.柵條 2.螺栓孔 3.三角平面鏟 4.土壤圖3 挖掘鏟結構圖Fig.3 Structural diagram of the digging shovel
2.2 固定式挖掘鏟入土角的確定
入土角的大小直接影響到挖掘鏟的長度、入土性能、碎土能力及挖掘阻力。挖掘鏟入土角設計較小時,將挖掘出的土藥混合物提升至一定高度時所需的鏟長較長,挖掘鏟容易入土,破碎土壤能力較差,挖掘時阻力小;挖掘鏟入土角設計較大時,與之相反。因此,選擇合適的入土角有助于提升整機的性能[8]。挖掘鏟掘起物單元體受力分析簡圖如圖4所示。
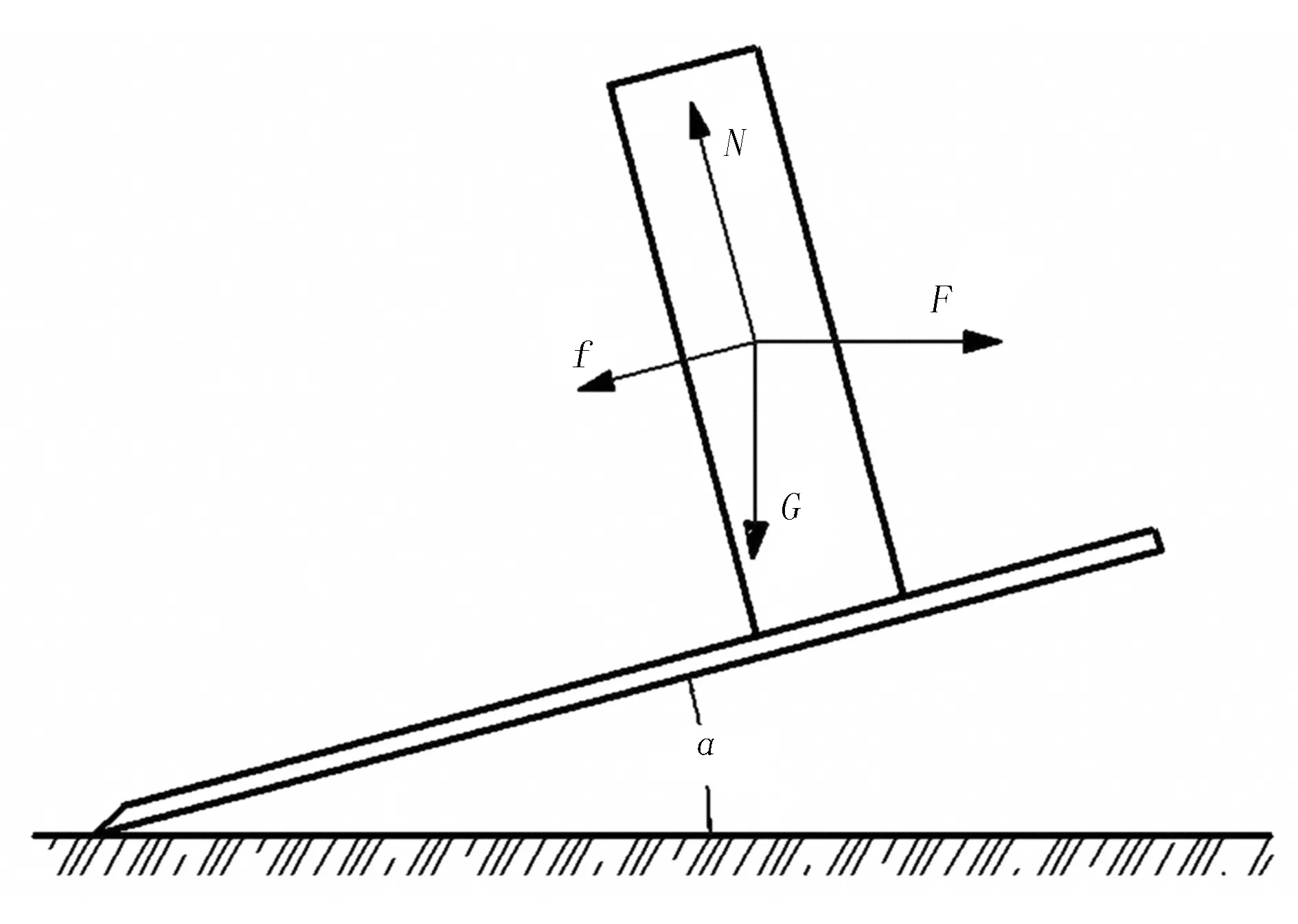
圖4 挖掘鏟掘起物單元體受力分析簡圖Fig.4 Force analysis sketch of excavation unit of digging shovel
入土角的許可值依據掘起物移動條件由下列方程式導出,即
(1)
式中α—挖掘鏟入土角(°);
F—沿著挖掘鏟移動掘起物所需的力(N);
N—挖掘鏟對掘起物的支持力(N);
G—鏟面上掘起物的重力(N);
f—掘起物在鏟面上所受的摩擦力(N);
μ—摩擦因數。
由式(1)可得
(2)
2.3 固定式挖掘鏟長度的確定
圖5為挖掘鏟掘起物單元體運動分析簡圖。
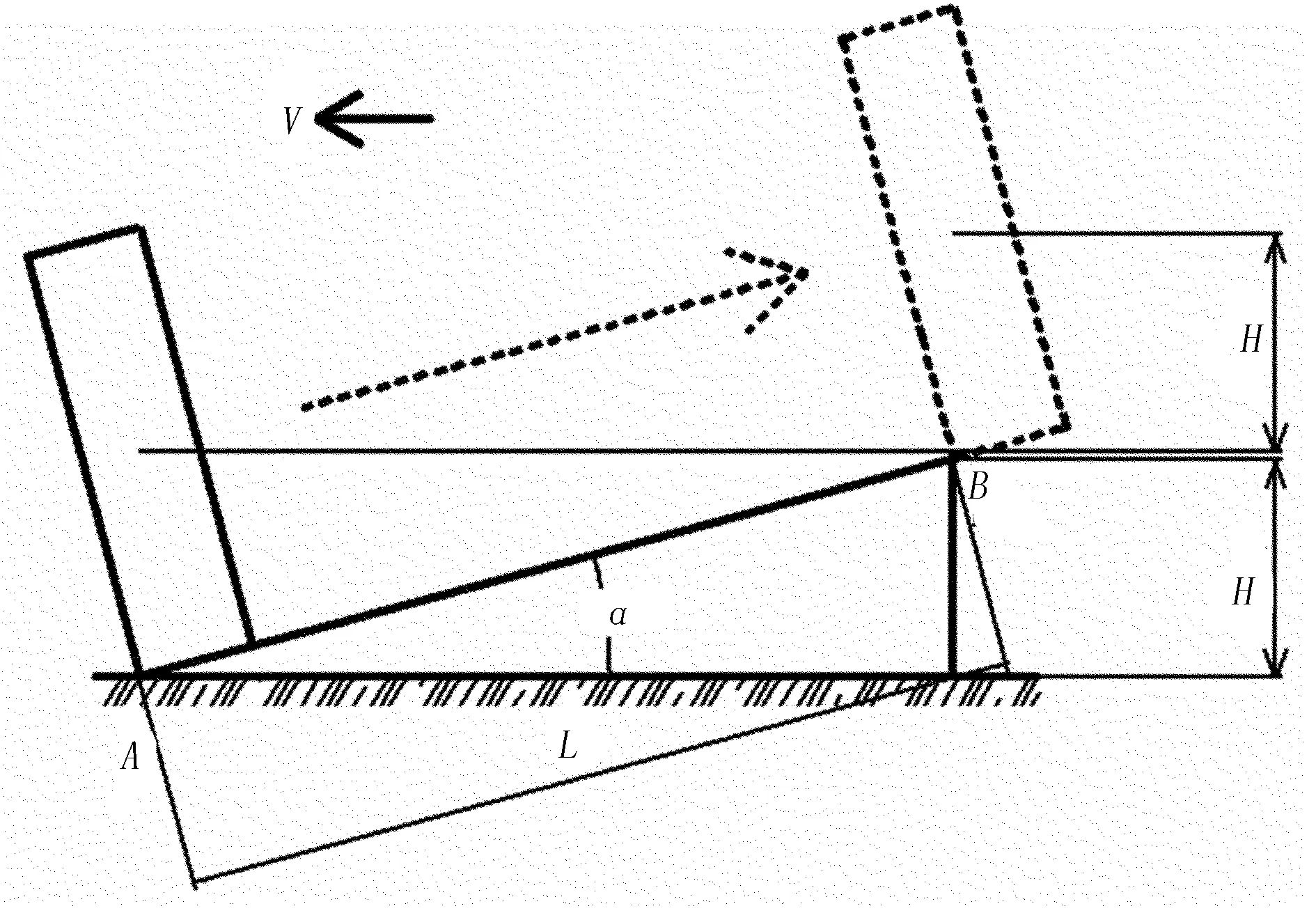
圖5 挖掘鏟掘起物單元體運動分析簡圖Fig.5 Motion analysis sketch of excavation unit of digging shovel
依據動量定理、動能定理及幾何關系,可計算挖掘鏟的長度。假設開始挖掘時(即A點)掘起物單元體前方土壤對其產生瞬時沖量,碰撞時間很短(t=0.01s),忽略其他干擾因素(如空氣阻力等),以單元體為研究對象,由動量定理可得
Fcosα-f-Gsinα=mv1
(3)
假設掘起物單元體沿鏟面運動到鏟的末端B點時失去了它的速度[9](v2=0),掘起物開始進入柵條,同時產生堆積現象,并由前方土壤推送至振動分離篩,在此過程中單元體所具有的動能全部轉化為摩擦力所做的功以及重力勢能,則由動能定理可得
(4)
由幾何關系得
(5)
由式(1)、(3)、(4)、(5)可得挖掘鏟的長度為
(6)
根據三角平面鏟特性、實際測量數據及計算結果,進行板藍根收獲機設計。當入土角α取值范圍為19°~23°。挖掘鏟的最佳長度為360~400mm。本設計入土角α=22°,則取L=390mm。
2.4 固定式挖掘鏟鏟刃張角的確定
鏟刃張角作為三角平面鏟關鍵結構參數之一,其設計值必須使雜草和莖稈都能滑離鏟刃[10]。鏟刃口受力如圖6所示,其必須滿足下列滑切條件,即
(7)
式中F0—作用于鏟刃的阻力(N);
θ—鏟刃張角(°);
f0—鏟刃與根莖及雜草間的摩擦力(N);
μ′—根莖及雜草與挖掘鏟間的摩擦因數;
在研究溫度對stokes光輸出特性的影響時,激光器自身的穩定性是非常重要的。因此先觀察實驗用多波長布里淵摻鉺光纖激光器在室溫下stokes光輸出的穩定性。在一小時內間隔10 min連續觀察stokes光輸出,其中SP功率固定在0.5 mW,得到圖5波長穩定性曲線。在實驗中觀察到從第1階stokes光BS1到第25階BS25,未發現明顯波長偏移,且功率波動在1 dBm以內。從BS26到BS30,功率波動較大,最高達2.5 dBm。因此,在研究stokes輸出特性時只選取穩定部分波長stokes光,以保證結果的準確性。
φ—根莖及雜草與挖掘鏟間的摩擦角(°)。
由式(7)可得
(8)
由此可知,θ≤180°-2φ。莖稈及雜草對鋼的摩擦因數μ′=tanφ≈0.85~0.9,即φ≈40°~42°,則θ應小于96°~100°[4]。依據文獻[4]的研究及綜合考慮各方面因素,該挖掘鏟最佳鏟刃張角取θ=55°。
3 挖掘鏟有限元仿真分析
挖掘鏟是板藍根收獲機的主要工作部件,工作中所受阻力很大,在保證挖掘機使用壽命和可靠性方面起著重要作用,故要求挖掘鏟有較高的抗磨損及抗變形性能[11]。因此,基于SolidWorks軟件中的有限元分析插件Simulation對板藍根收獲機的關鍵部件三角平面挖掘鏟進行了靜力學分析。其有限元分析是在整機處于極限作業工況下進行(即挖掘深度最大、掘起物保持連續、機車牽引力最大、振動篩面上土藥混合物鋪放均勻、挖掘裝置全幅寬作業,以及掘出物在鏟面上分布均勻等),通過定性分析挖掘鏟在受載荷情況下的應力、位移的變化情況,來檢驗校核其設計和材料選擇是否滿足要求。
3.1 模型創建
按照上節挖掘鏟的設計中所確定的參數利用SolidWorks軟件進行三維實體建模,得到三角平面挖掘鏟模型如圖7所示。
3.2 材料屬性定義
此挖掘鏟的材料選用普通碳素結構(Q235),含碳適中,綜合性能較好,具有良好的塑性和焊接性能,性價比高,實用性強。相關屬性為:密度7800kg/m3,彈性模量210GPa,泊松比0.28,屈服強度220.6MPa。
3.3 網格劃分
對挖掘鏟進行網格劃分,設置網格單元尺寸為5mm,公差為0.25mm,如圖8所示。
3.4 施加約束及載荷處理
約束條件:在挖掘鏟螺栓孔的位置添加固定幾何體約束。
為使該固定式三角平面鏟滿足不同工況下的作業要求,在進行靜力學分析前,假設其滿足以下條件:①挖掘深度最大為500mm;②挖掘鏟整個鏟面都參與工作(工作寬度為400.9mm);③鏟面上掘出物(土壤和板藍根的混合物)分布均勻、密度均勻。基于以上假設,計算鏟面上的應力。鏟面上掘出物的重力G為
(9)
式中ρ—土壤和板藍根混合物的密度,ρ=1300kg/m3;
V—鏟面上掘出物的體積(m3);
g—重力加速度,g=9.8m/s2;
SΔ—鏟面的面積(m2);
h—最大挖掘深度(m);
L—挖掘鏟的長度(m);
l—挖掘鏟工作寬度(m)。
依據已知數據,計算可得G=498.0N。以鏟面掘出物為研究對象,對其進行受力分析,如圖9所示。
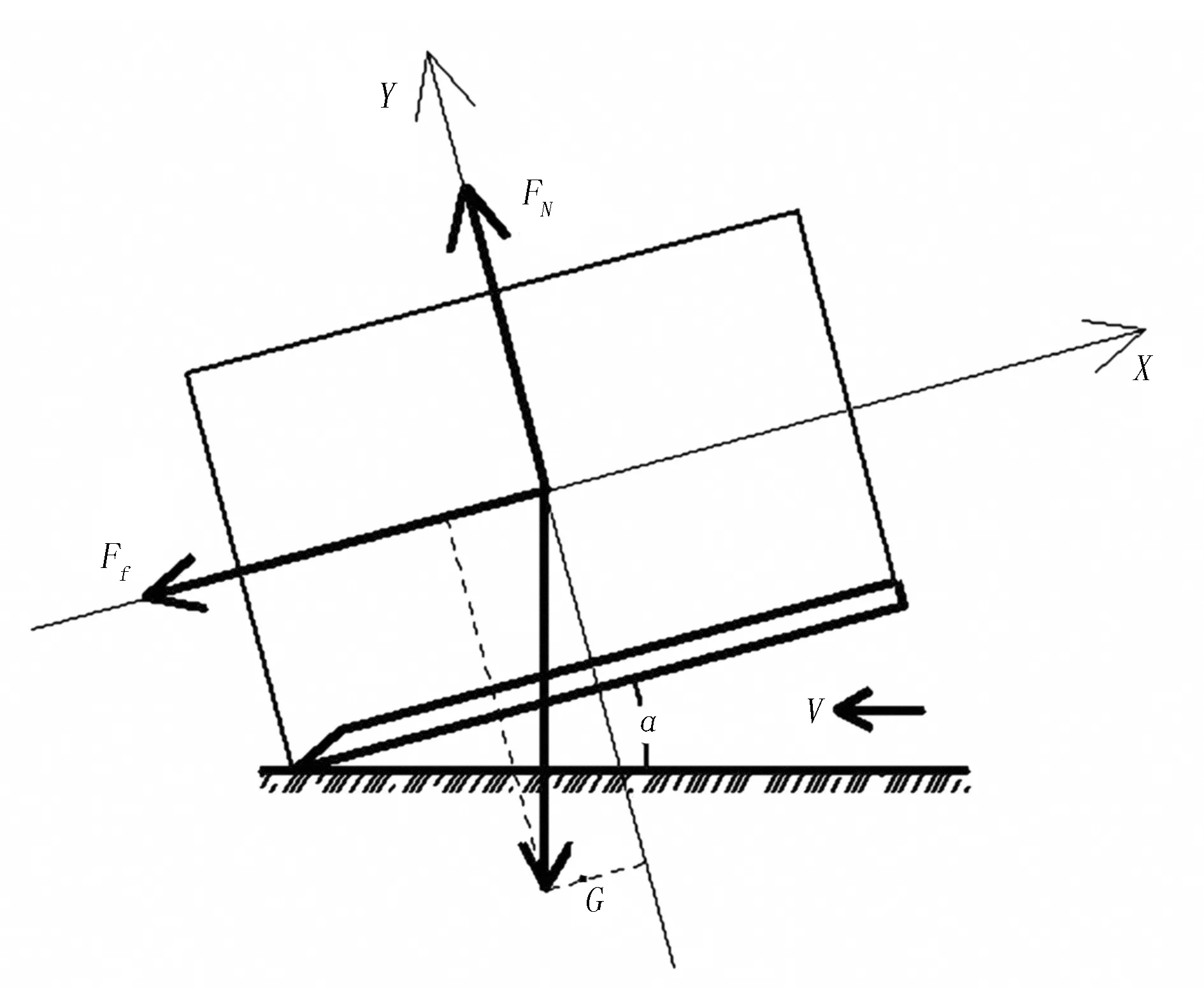
圖9 鏟面掘出物受力分析圖Fig.9 Force analysis diagram of excavated object on shovel face
由圖9得到以下公式,即
(10)
式中μ—挖掘鏟與掘出物之間的摩擦因數,取μ=值0.5。

3.5 運行結果分析
運行計算后,得到結果如圖10、圖11所示。由圖10和圖11可知:挖掘鏟的應力主要集中在3個螺紋孔處,且最大應力分布在鏟的背面離鏟尖較近的兩個螺紋孔處,最大應力值為22.44MPa,遠小于挖掘鏟的許用應力220.6MPa,強度滿足設計要求;而產生最大位移的位置為鏟尖,變形值為0.09184mm,與整個鏟相比該變形量很小,可以忽略。綜上所述,該挖掘鏟在工作過程中的形變量和應力滿足要求,能夠安全作業,因此該鏟設計合理,滿足設計要求。
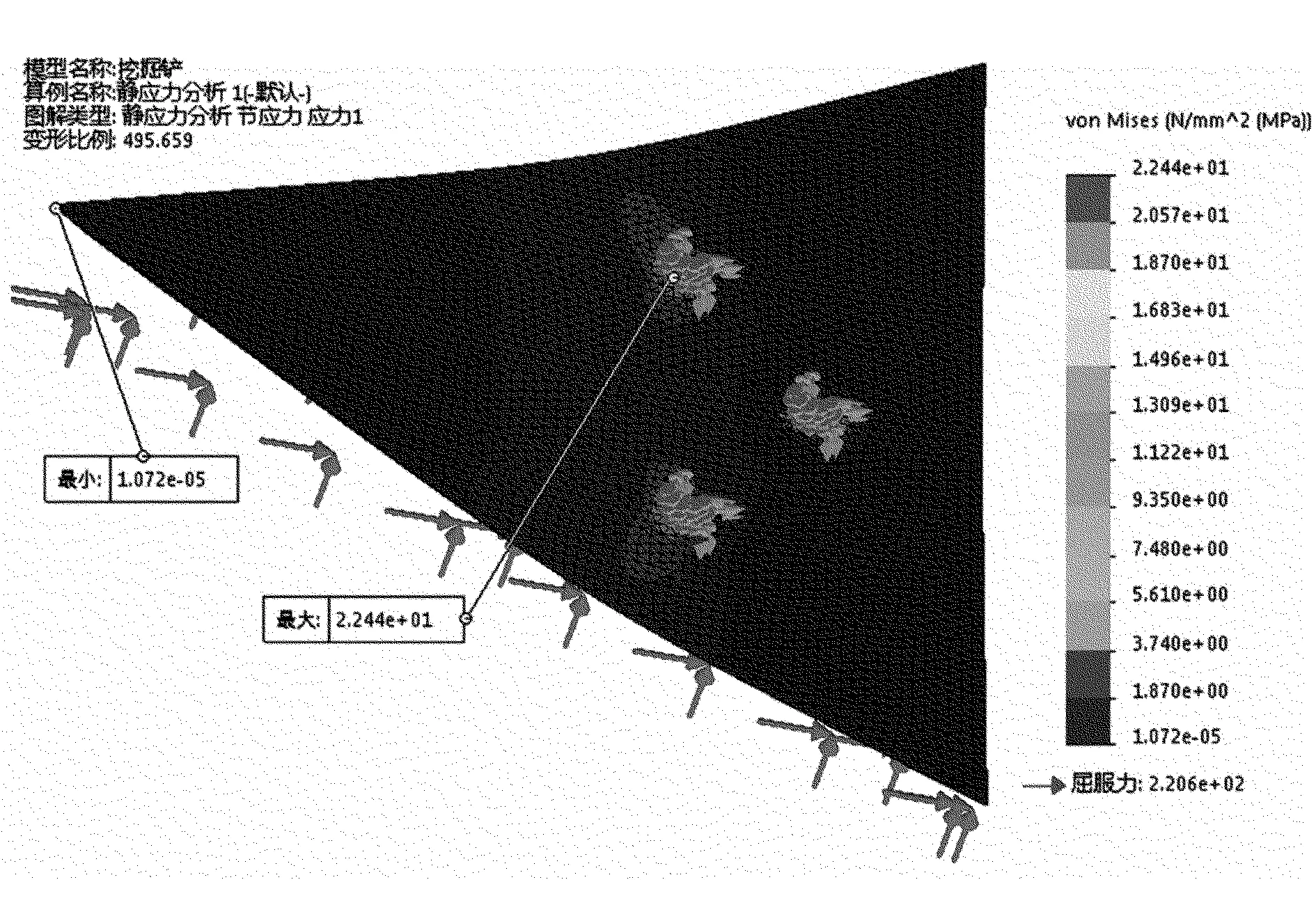
圖10 挖掘鏟應力云圖Fig.10 Stress nephogram of digging shovel
4 試驗驗證
通過對4UD-600型板藍根收獲機樣機的試制,并按照挖掘鏟設計參數的要求對其進行制作與安裝,來進行試驗驗證,樣機如圖12所示。以挖掘鏟背面離鏟尖最近的螺紋孔處的應力及鏟尖的位移為試驗指標,以鏟面上土層的厚度為因素,對其進行單因素試驗驗證。
4.1 試驗方法及結果
在挖掘鏟鏟面上放置三角柱形模具(厚度較薄,質量可忽略不計),試驗過程中通過向模具中加注土壤來調節鏟面土層的厚度。測量儀器有:①位移傳感器,測量精度為0.001mm,安裝在鏟尖位置,用來測量鏟尖的位移量;②應變測試儀,在挖掘鏟背面離鏟尖最近的螺紋孔附近平整干凈處粘貼應變片,來測量此處因受壓產生的應變,通過公式(11)計算此處應力值。
(11)
式中E—彈性模量(MPa),取E=2.10×105MPa;
σ—應力(MPa);
ε—應變。
試驗結果如表2所示。
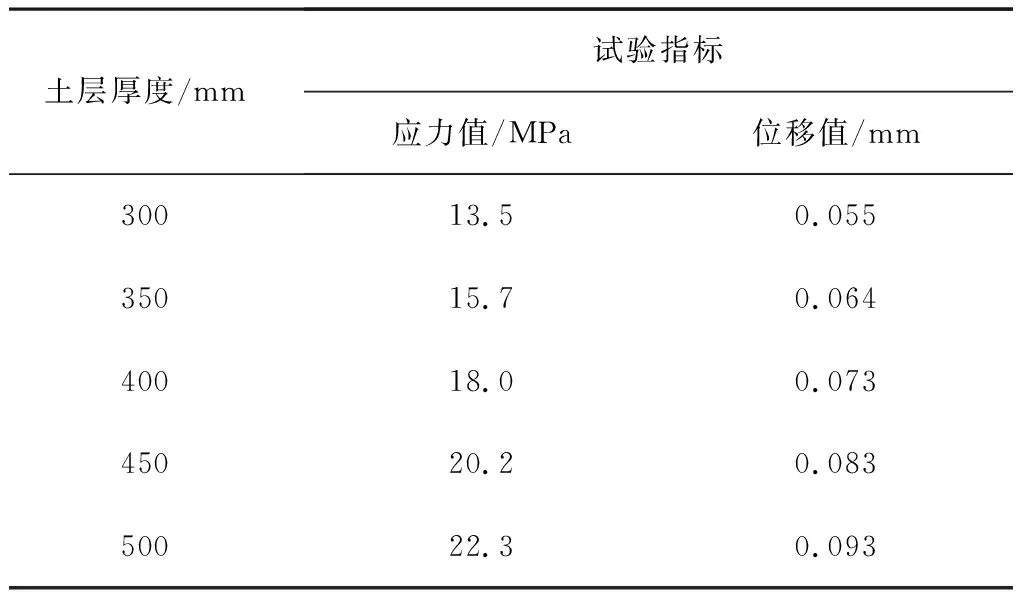
表2 試驗結果Table 2 Test results
4.2 試驗分析
應力-土層厚度關系圖如圖13所示。由圖13可知:其他條件一定的情況下,挖掘鏟背面離鏟尖最近的螺紋孔處的應力值隨著土層厚度的增加而增大,達到極限時(即挖掘深度最大為500mm),應力值為22.3MPa,與仿真結果基本一致,結果在可信范圍內。
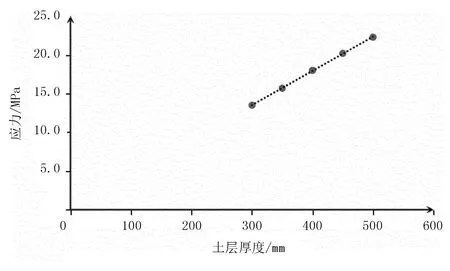
圖13 應力-土層厚度關系圖Fig.13 Diagram of the relationship between stress and soil thickness
位移-土層厚度關系圖如圖14所示。
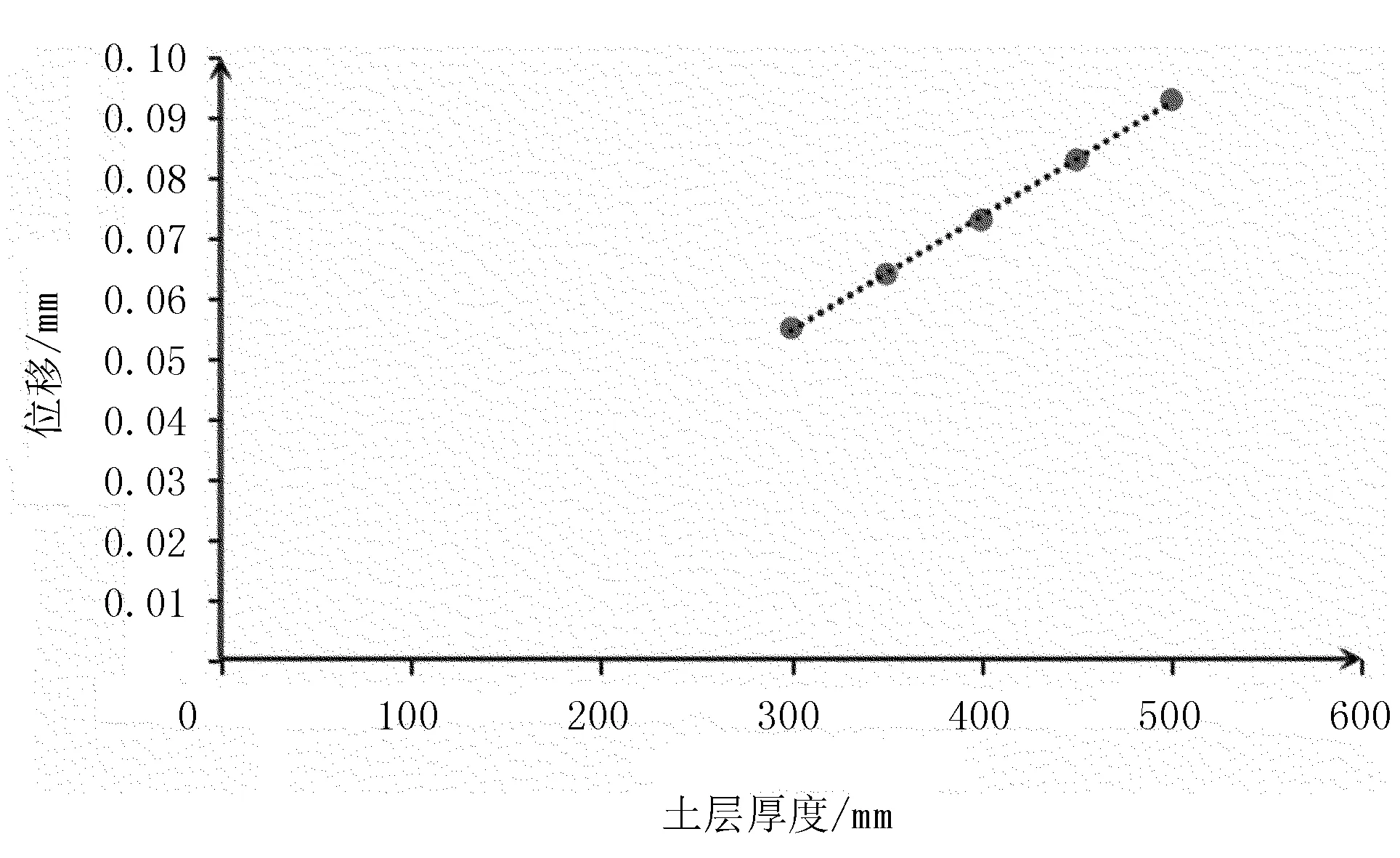
圖14 位移-土層厚度關系圖Fig.14 Diagram of the relationship between displacement and soil thickness
由圖14可知:在其他條件一定的情況下,鏟尖的位移值隨著土層厚度的增加而增大,達到極限時(即挖掘深度最大為500mm)位移值為0.093mm,與仿真結果基本一致,結果在可信范圍內。同時,在田間對樣機進行實地測試,樣機結構緊湊,收獲效率較人工收獲高,工作狀況良好,挖掘鏟等關鍵部件均未出現斷裂、大幅度彎曲等不良工況,強度滿足實際要求。
5 結論
1)4UD-600型板藍根收獲機整機結構緊湊,工況良好,工作幅寬600mm,挖掘深度300~500mm,純工作時間生產率為0.08~0.16hm2/h,可一次完成板藍根的挖掘、土藥分離和成條側出鋪放,降低了勞動強度,提高了生產效率。
2)參考薯類挖掘鏟的設計,利用動力學分析構建工作阻力模型,依據動量定理、動能定理及幾何關系計算,提出一套板藍根收獲機挖掘鏟的設計思路,確定出挖掘鏟的最佳入土角α=19°~23°,鏟長L=360~400mm,鏟刃張角θ=55°,從而確保在實際挖掘作業過程中阻力最小、無壅土現象產生。
3)通過對該板藍根收獲機三角平面挖掘鏟進行有限元靜力學分析,得到該挖掘鏟的應力、位移云圖。結果表明:挖掘鏟最大應力分布在鏟的背面離鏟尖較近的兩個螺紋孔處,最大應力值為22.44MPa;產生最大位移的位置為鏟尖,變形值為0.09184mm。通過試驗可知,仿真結果與試驗結果基本一致,結果在可信范圍內。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04