基于SolidWorks的組合式大蔥起苗機的設計與試驗
2020-10-19 01:54:06張吉強牛子孺李天華吳彥強李廣華侯加林
農機化研究 2020年12期
關鍵詞:設計
張吉強,牛子孺,李天華,吳彥強,李廣華,侯加林
(1.山東農業大學 機械與電子工程學院,山東 泰安 271018;2.山東省園藝機械與裝備重點實驗室,山東 泰安;3.青州華龍機械技術研發有限公司,山東 濰坊 262500)
0 引言
大蔥是人們的日常生活中不可或缺的調味品,也是重要的經濟作物之一,且含有豐富的糖類、維生素、鈣、鎂等物質,具有很高的營養價值。全國的大蔥種植面積約有5333.3 khm2,但是目前大蔥的收獲主要是依靠人工撿拾,效率低,對蔥苗的損傷率高,且隨著人工勞務費的增長,使得大蔥收獲的成本大幅增長,因此大蔥機械化收獲已成為影響大蔥大規模種植的主要問題。由山東農業大學研制的雙行自走式大蔥收獲機適用于大規模收獲,加工成本高,且在大蔥夾持運輸到頂部進行鋪放時需要人工進行整理和擺放,會耗費一定的勞動力[1]。日本、韓國等地區主要使用的是小型自動式大蔥聯合收獲機,動力小、效率低且收獲后的大蔥根部存在較多泥土。
為此,結合國內大蔥收獲模式和農藝要求,并借鑒國內外的大蔥收獲技術,同時采用SolidWorks三維軟件設計,對組合式大蔥起苗機進行零部件和整機進行虛擬設計,研制了組合式大蔥起苗機,以期解決國內小規模大蔥收獲的難題。
1 SolidWorks軟件介紹
1.1 零件實體與裝配體模型的建立
在SolidWorks中,零件的實體模型由一系列特征組合構成,設計時選擇所需要的特征,給定尺寸、定位和屬性等,形成所需要的實體模型,并通過參數和幾何約束關系的相互關聯確定零件的特征[2-4]。幾何約束關系在創建模型的同時被創建,修改模型時的約束關系保持不變,設計意圖也不變。零件設計時,必須考慮好如何表達該特征與特征之間的關系。起苗刀、蔥苗傳輸板和匯集抖土裝置是組合式大蔥起苗機的核心工作部件,起苗刀和匯集抖土鏈的結構參數和運動參數對起苗和抖土效果有重要影響,設計時需要重點考慮。
1.2 整機模型的建立
組合式起苗機整機模型由多個裝配體構成,具備一定裝配約束關系的多個零件的組合構成部件裝配體,按照部件的不同功能,將多個裝配體依次放置到機架的相應安裝位置,構成整機模型[4],如圖1所示。
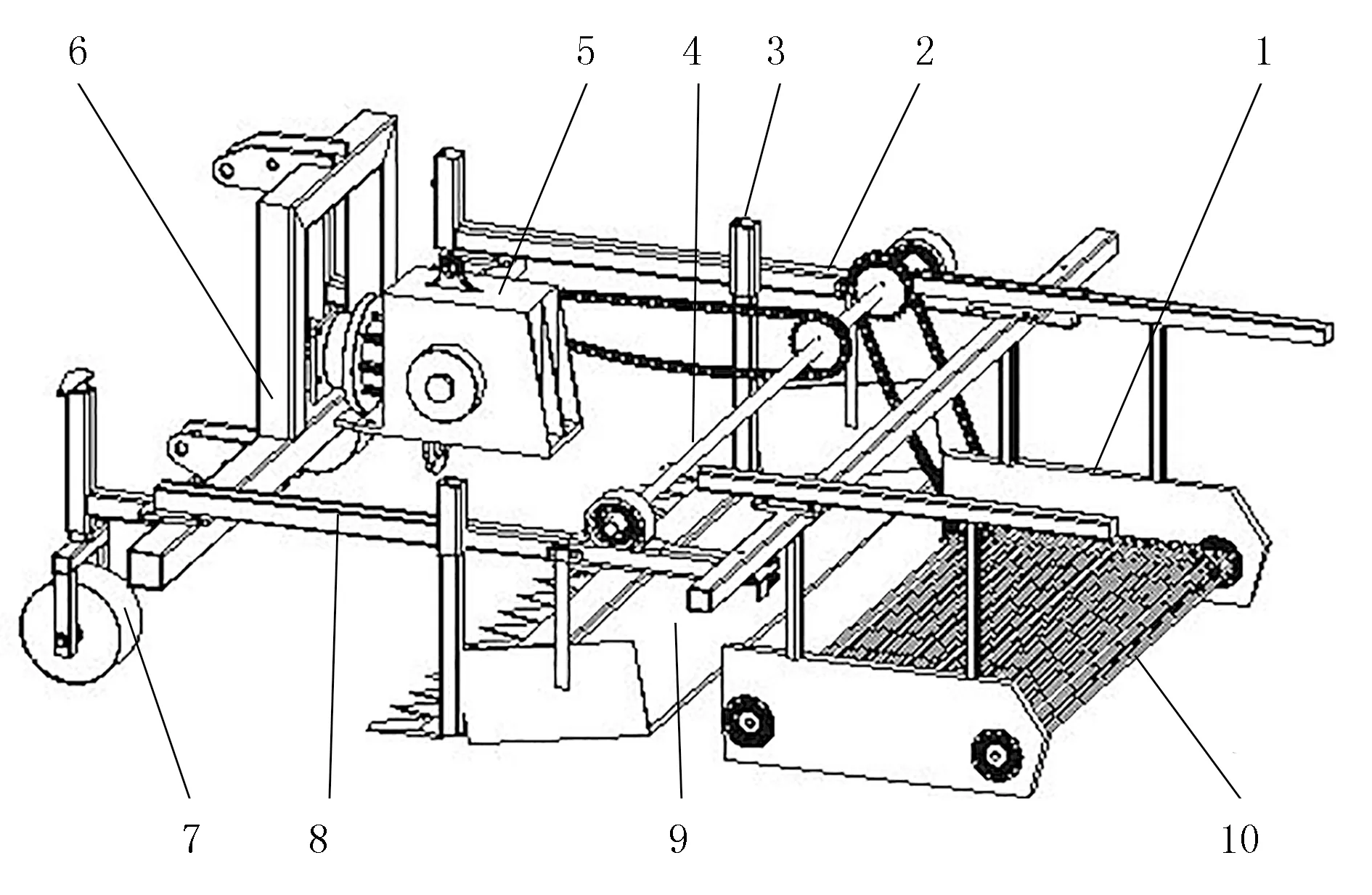
1.匯集抖土裝置 2.傳動裝置 3.起苗刀支架 4.起苗刀 5.變速箱 6.牽引架 7.行走輪 8.機架 9.蔥苗傳輸板 10.滾動軸圖1 組合式大蔥起苗機結構圖Fig.1 Structure of combined spring onion planter
整機主要由機架、行走輪、變速箱、傳動裝置、起苗刀、蔥苗傳輸板和匯集抖土鏈等7部分組成,匹配動力35 kW的拖拉機,并沿蔥苗壟前行。工作過程為:拖拉機帶動機架前行,拖拉機的動力輸出軸與機架上的變速箱連接,變速箱通過鏈條鏈輪將動力輸送至機架上的傳輸軸上,傳輸軸轉動帶動上面的鏈輪轉動,利用鏈條帶動匯集抖土裝置上主動軸端部的主動鏈輪轉動,繼而帶動主動軸上撥齒輪轉動,撥齒輪的撥齒撥動各個滾動軸轉動;機架前行時,起苗刀伸入土壤中在蔥苗根部將蔥苗連同根部凸塊一同破碎并輸送至后方的蔥苗傳輸板上,不斷累積的蔥苗沿蔥苗傳輸板向后落入到匯集抖土裝置上;匯集抖土裝置上的抖土鏈的各個滾動軸呈環形滾動轉動,落至滾動軸上的蔥苗在滾動軸滾動轉動過程中,將部分泥土與蔥苗分離,泥土從滾動軸之間的容置通道落下,從而達到大蔥凈土的目的,泥土分離的蔥苗從抖土鏈上落下并依次排列成行,完成起苗過程。
1.3 技術參數
針對國內大蔥種植模式和種植農藝要求,整機主要技術參數如表1所示。
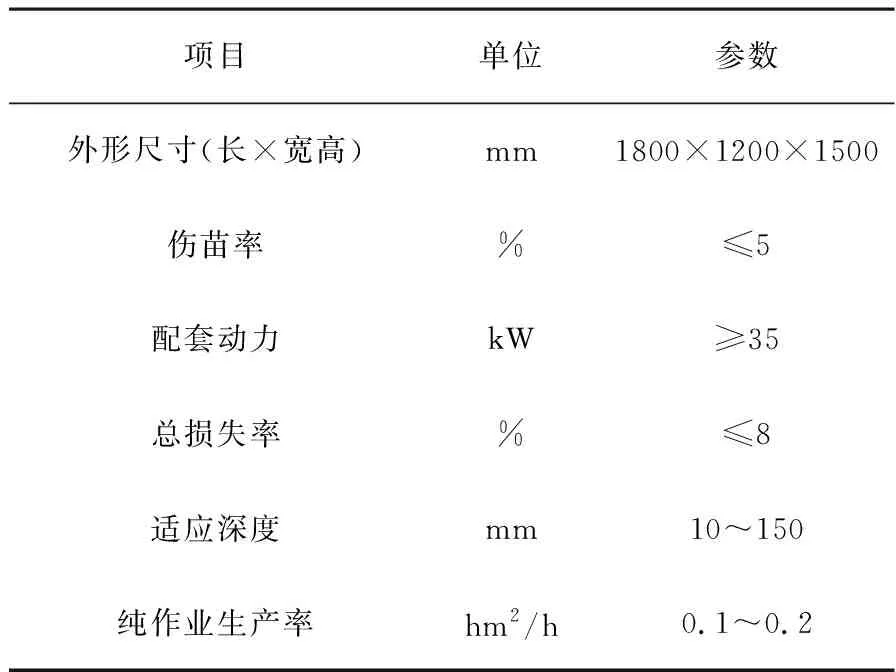
表1 整機主要技術參數Table 1 Main technical parameters of the whole machine
2 機械傳動設計與減速器選型
2.1 傳動系統總設計
組合式大蔥起苗機的系統結構及組成如圖2所示。工作時,動力輸入軸經萬向節與拖拉機輸出軸連接,由輸入軸連接變速箱工作,由變速箱的輸出軸通過第1鏈輪鏈條傳動帶動傳動裝置進行工作,由傳動裝置上的傳動軸帶動第2鏈輪鏈條帶動匯集抖土裝置上的撥齒及滾動軸進行工作;經起苗刀將蔥苗起苗后傳輸到蔥苗傳輸板上,繼而落到匯集抖土裝置上,經匯集抖土裝置進行蔥苗抖土和整理,方便后期人工撿拾。
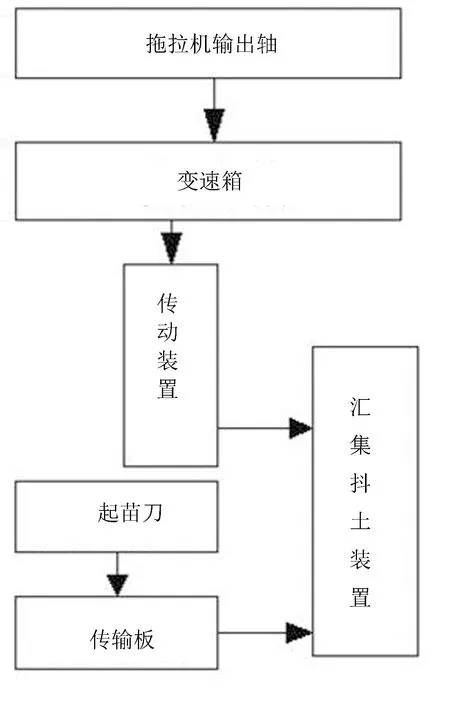
圖2 組合式大蔥起苗機系統結構圖Fig.2 System structure of combined spring onion seedling machine
2.2 減速器選型
減速器作為整機關鍵部件之一,為傳動裝置和匯集抖土裝置提供動力輸入,因此減速器的選型至關重要。結合本機型工作效率和匯集抖土裝置轉動速度,在試驗的基礎上最終選用X.B型擺線針輪減速器,其主要技術參數如表2所示,結構如圖3所示。 擺線針輪減速器是一種采用擺線針齒嚙合行星傳動原理的傳動機型,轉速降低范圍大,輸出轉矩穩定,并可實現正反運轉。
表2 擺線針輪減速器主要技術參數
圖3 減速器結構Fig.3 Structure of reducer
3 關鍵部件設計
3.1 起苗刀設計
起苗刀作為關鍵部件之一,主要是將大蔥從地中挖掘出來,如圖4所示。起苗刀通過調深機構安裝于機架上,調深裝置包括豎向固定于起苗刀上的調節管,以及套設在調節管外且與機架固定的套管,調節管及套管上分別設有調節孔并通過調節螺栓相互連接。為保證挖掘鋒利度,起苗刀截面設計為呈鍥狀的鋸齒刀,同時還不會纏繞雜草。起苗刀工作參數如圖5所示。
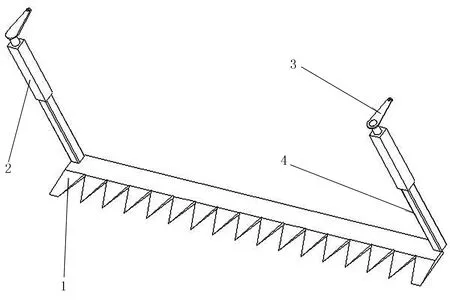
1.起苗刀 2.調節管 3.調節螺栓 4.套管圖4 起苗刀結構圖Fig.4 Structure diagram of seedling cutters
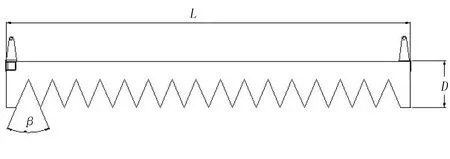
圖5 起苗刀工作參數Fig.5 Operating parameters of the cutters
起苗刀工作參數主要長度L、寬度D和刀齒夾角β。本機型取β=46°,L=0.8m,D=0.25m,調節管高度可根據大蔥實際深度進行調節。
3.1.1 起苗刀的材料和機械特性
所設計起苗刀的材料選用65Mn(彈簧鋼),其材料屬性如表3所示。
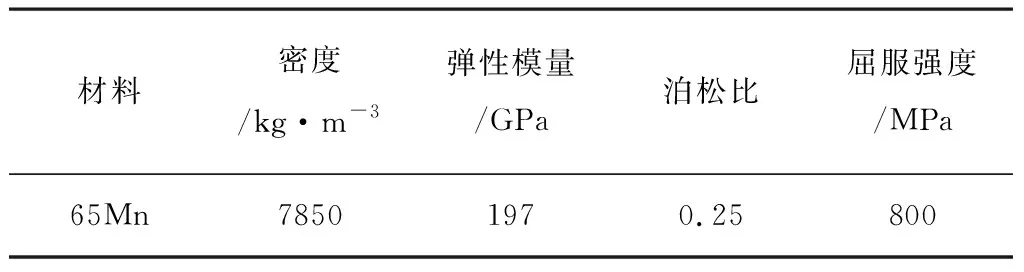
表3 材料屬性Table 3 Material properties
3.1.2 起苗刀受力分析
由土壤對起苗刀的阻力可知,土壤對起苗刀的阻力可分為3部分。
土壤對起苗刀片的摩擦阻力F1為
F1=fG
(1)
式中F—土壤對起苗刀片工作表面的摩擦因數;
G—起苗刀片的承重重力(N)。
土壤本身的慣性力F2為
F2=0.01hβdhV2
(2)
式中h—起苗寬度;
β—與起苗刀片和土壤性質有關的系數(N·s2/m4);
d—起苗深度;
V—機具前進的速度(m/s)。
土壤抵抗塑性變形的力F3為
F3=0.01Mdh
(3)
式中M—土壤比阻(Pa)。
3.1.3 起苗刀切土功率分析
起苗刀的理論切土功率為
P=0.1δdVh
δ=K0K1K2K3K4
(4)
式中 δ—起苗比阻(N/cm2)。
K0—土壤堅實度(N/cm2);
K1—起苗深度修正系數;
K2—土壤含水率修正系數;
K3—土壤中殘留植被修正系數;
K4—作業方式修正系數。
3.2 蔥苗傳輸板
蔥苗傳輸板主要由底板和擋板兩部分組成,用于起苗刀起苗后的蔥苗過渡至匯集抖土裝置上。其兩側的擋板通過支架固定于機架上,用于防止蔥苗輸送過程中從兩側滑落,保證蔥苗順利輸送至后方的匯集抖土裝置內。蔥苗傳輸板為由前至后逐漸升高的斜板,目的是將起苗刀起苗后的大蔥順利落到匯集抖土裝置上。蔥苗傳輸板結構圖如圖6所示。其工作參數包括底板長度L、擋板長度H和高度h,三視圖如圖7所示。為保證起苗后的蔥苗能順利落到匯集抖土裝置上,取底板長度L=1000mm,擋板長度H=600mm,高度h=400mm。
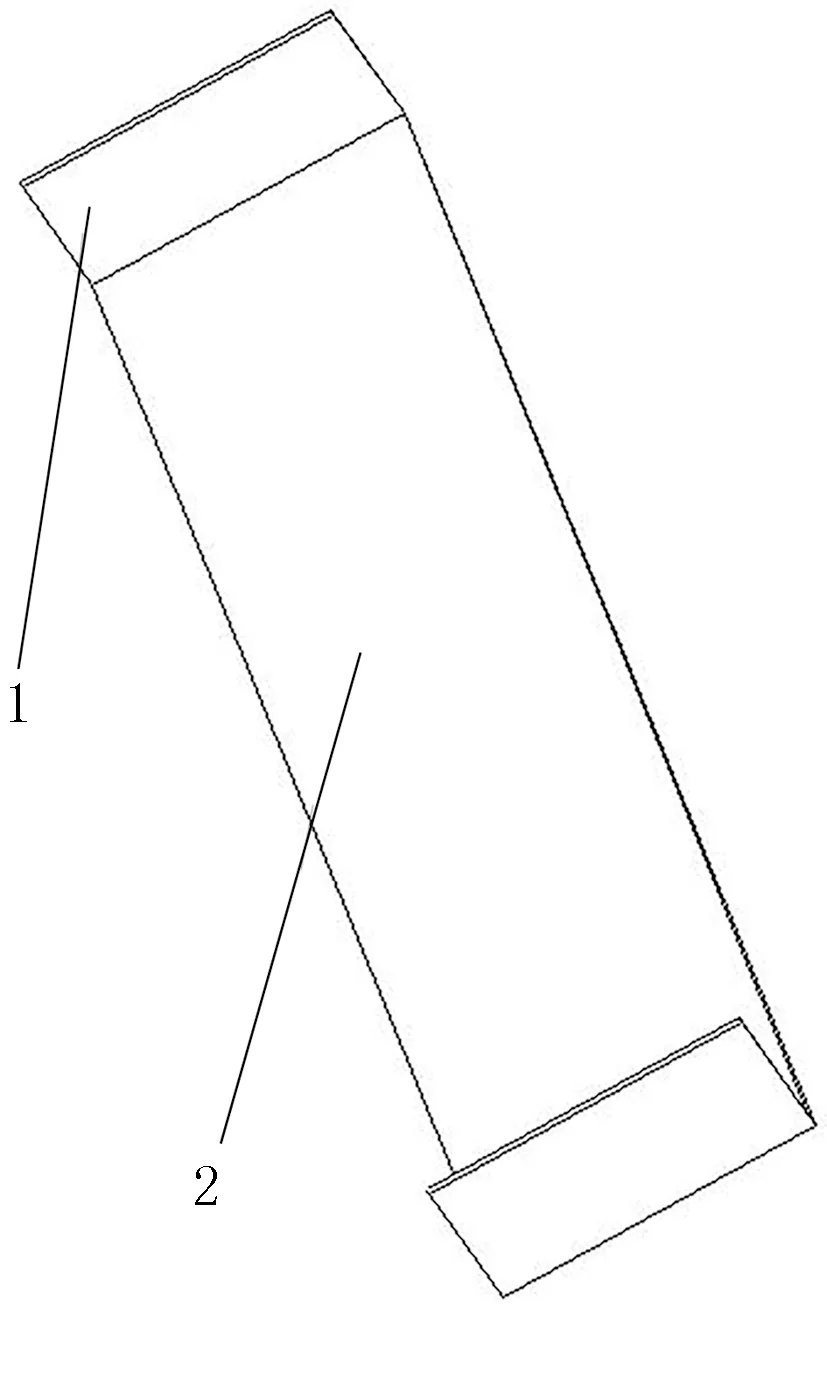
1.底板 2.擋板圖6 蔥苗傳輸板結構圖Fig.6 Schematic diagram of onion seedling transmission
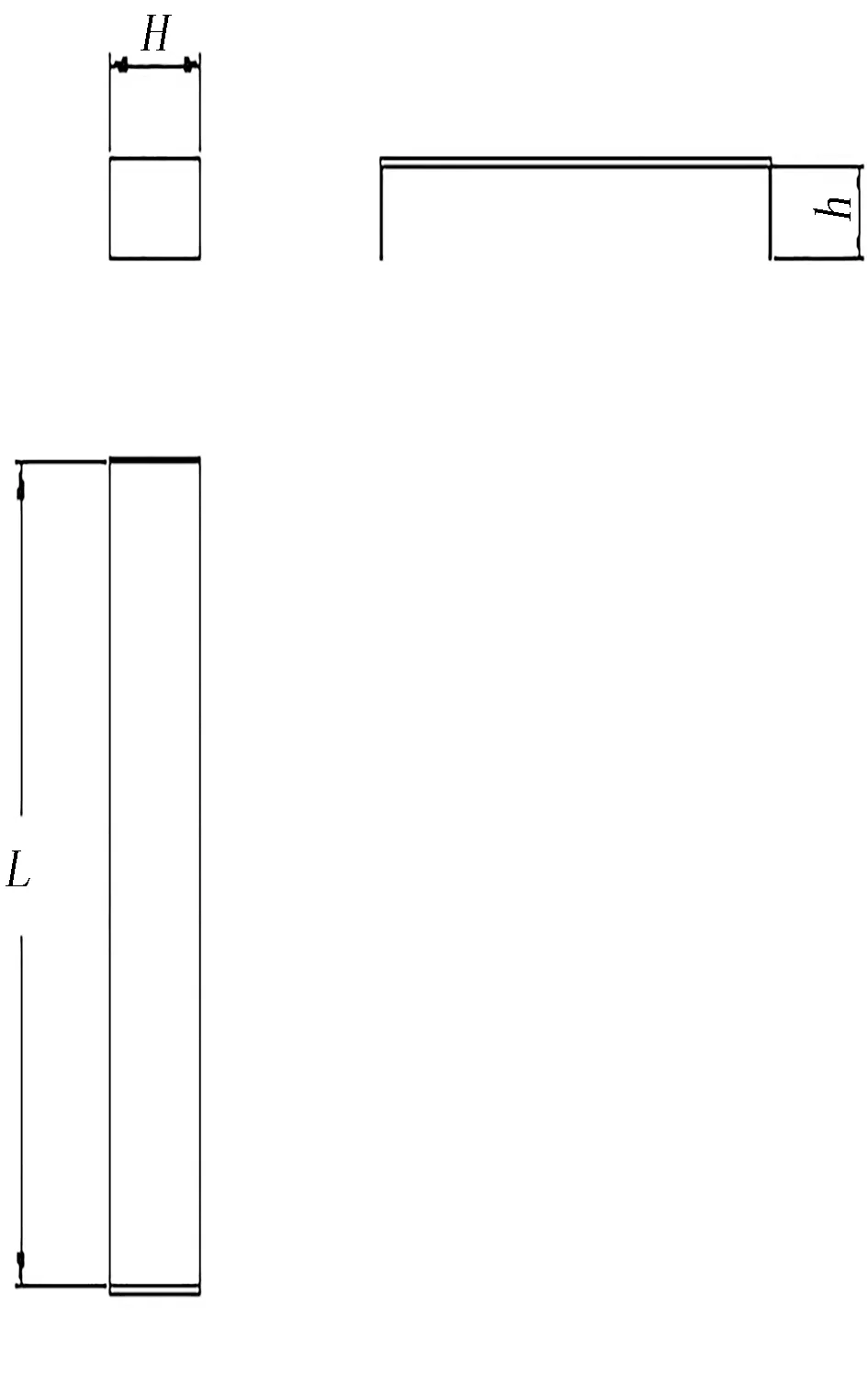
圖7 蔥苗傳輸板三視圖Fig.7 Three views of onion seedling transmission board
蔥苗輸送量是衡量起苗機生產能力的重要指標,輸送量高、輸送效果好能夠保證機器在有限的起苗時間內完成起苗任務。蔥苗傳輸板設計的最大輸送量為2500 kg/h,其輸送面的傾斜系數由式(4)確定,即
Q=H×h×μ×γ×K×ν
(5)
式中H—擋板的長度(mm);
h—擋板高度(mm);
μ—輸送蔥苗單位容積的質量(kg/m3);
γ—充滿系數;
K—傾斜系數;
ν—起苗速度(m/s)。
由式(4)可得
K=Q/(H×h×μ×γ×v)
(6)
根據國內外學者實驗,取充滿系數γ=0.5,蔥苗的容積質量為μ。實驗測得μ=0.7~0.9×103kg/m3,起苗速度為v=0.5m/s,H和h的設計值分別為600、400mm。故K>0.54,對應的傾斜角度θ≤30°。傾斜系數值K與傾斜角對應關系如表4所示。
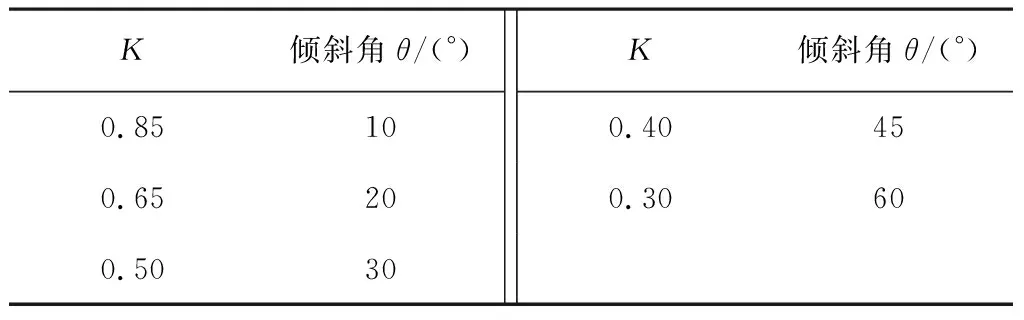
表4 傾斜系數值KTable 4 Tilt coefficient value K
3.3 匯集抖土裝置
抖土鏈包括與主動軸和從動軸平行的多個等間距設置的滾動軸,每個滾動軸的兩個端部均轉動連接有兩個前后設置的連接板,相鄰滾動軸之間通過共用一個連接板連接,相鄰的滾動軸之間為撥齒輪上撥齒的容置通道。
抖土鏈上的多個滾動軸通過兩端的連接板連接起來形成與主動軸和從動軸長度相同的抖土鏈,并套設在主動軸和從動軸端部的撥齒輪上,通過主動軸的轉動,利用撥齒輪上撥齒插入相鄰滾動軸之間的容置通道對滾動軸進行撥動,帶動滾動軸轉動進而帶動上面的蔥苗轉動并將泥土從兩個滾動軸之間的容置通道過濾下去。匯集抖土裝置結構圖如圖8所示。
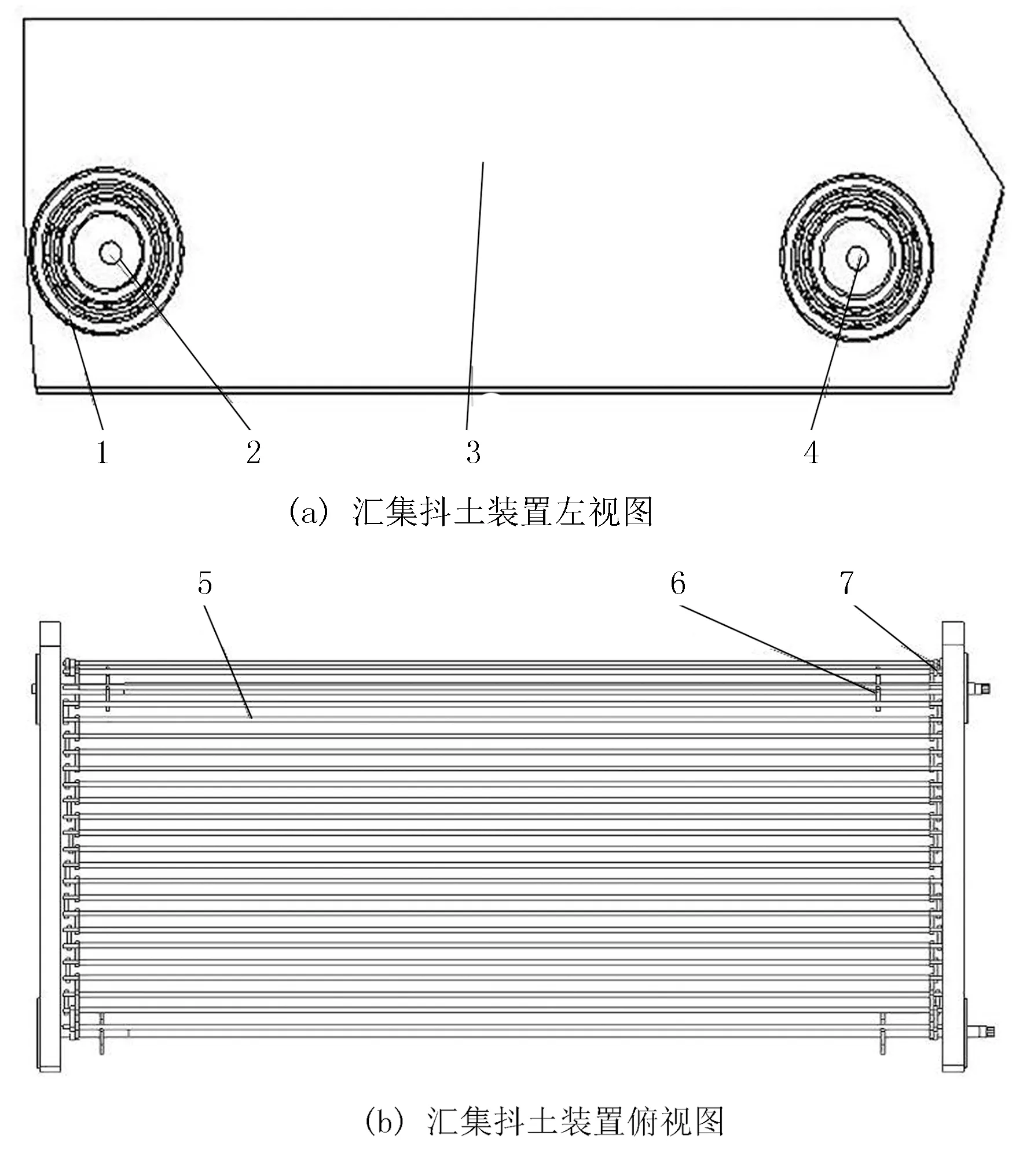
1.軸承 2.主動軸 3.匯集擋板 4.被動軸 5.連接板 6.撥齒輪 7.滾動軸圖8 匯集抖土裝置結構圖Fig.8 Structure diagram of soil shaking device
匯集抖土裝置中滾動軸的轉動速度應當大于或等于蔥苗傳輸板傳輸蔥苗的速度,如果滾動軸速度小于蔥苗傳輸板傳輸蔥苗的速度會造成蔥苗在匯集抖土裝置上的擁堵和相互擠壓,容易損傷大蔥,增加起苗的傷苗率。
匯集抖土裝置上各個滾動軸的間距應小于蔥苗直徑,但又不能過小,間距太小無法實現蔥苗的抖動效果,間距過大會使蔥苗直接落到地面,后期人工撿拾會對蔥苗造成損傷,降低蔥苗收獲質量。
匯集抖土裝置運動速度關系如為
(7)
式中V—滾動軸轉動速度;
R—撥齒輪直徑;
θ—蔥苗傳輸板與地面的夾角。
4 樣機性能試驗及分析
4.1 試驗目的
對組合式大蔥起苗機進行性能試驗,檢測各關鍵功能部件能否正常作業,是否滿足設計技術參數,以及驗證樣機在本地區是否具有適應性及可推廣性。
4.2 試驗設計
根據三維模型各部件標準規格參數進行設備選型及樣機搭建,進一步對組合式起苗機進行性能試驗。試驗地點選取青州華龍大蔥試驗基地,地勢平坦,無障礙物,土壤為沙壤土。試驗地測定區長度為30m,重復3次,分別記錄每次試驗所用的時間、大蔥起苗的總株數、損傷個數及起苗刀可挖掘深度等相關數據。
4.3 配套動力
試驗采用動力為40 kW的拖拉機,擋位為Ⅱ擋,實際作業速度為0.8 m/s。
4.4 試驗結果
試驗結果如表5所示。
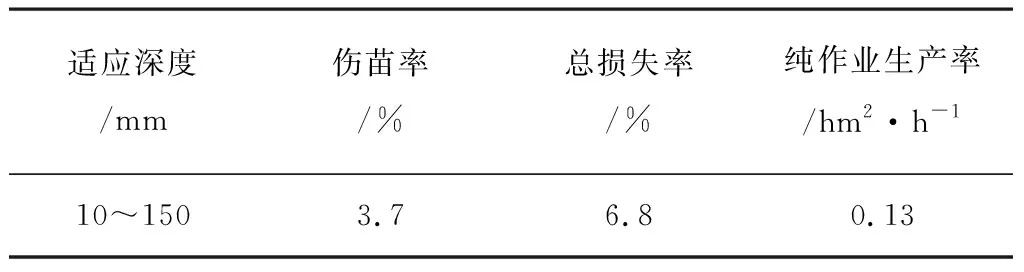
表5 田間起苗試驗結果Table 5 Results of field seedling experiment
5 結果分析
由表4可知:組合式大蔥起苗機的傷苗率、總損失率和純作業生產率均滿足項目規定的指標要求。同時,樣機在試驗過程中還發現以下問題:
1)起苗刀在工作過程中會堆積泥土,作業時間長會失去起苗效果。解決的辦法是可加長起苗刀刀齒或者增加凸輪機構,實現起苗刀的微振動,實現秧苗的起苗抖土效果。
2)匯集抖土裝置在實際作業中出現晃動,抖土穩定性差。解決的方案是延長機架桁架且增加支架固定匯集抖土裝置,并在機架的左右兩側增加行走輪裝置,增加整機穩定性,以此實現更好的抖土效果。
6 結論
1)利用三維建模軟件SolidWorks和二維軟件Autocad實現了組合式起苗的三維建模和圖紙的繪制,SolidWorks和Autocad具有建模簡單、直觀性強和效率高等特點。
2)通過田間試驗結果表明:機具主要性能指標適應深度、傷苗率和總損失率均達到設計指標,且市場上無該機型售賣,因此具有一定的市場競爭力。
3)通過設計匯集抖土裝置,在實現大蔥根部泥土抖動的同時可以對大蔥進行鋪放和整理,降低了人工勞動強度。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04