缽苗移栽機取苗裝置研究現狀及展望
2020-10-19 01:53:32馮世杰吳明亮
農機化研究 2020年12期
馮世杰,吳明亮,顏 波,全 偉
(1.湖南農業大學 工學院,長沙 410128;2.信陽農林學院 園藝學院,河南 信陽 464000;3.湖南省現代農業裝備工程技術研究中心,長沙 410128)
0 引言
隨著社會的發展,我國農業勞動人口和人均可耕地面積正逐年減少,而對糧食和經濟作物的需求總量日漸增加。作物移栽能夠充分利用光熱資源,提高復種指數和作物的單產,是我國未來確保農產品供給安全的重要手段[1-3]。目前,半自動化移栽機是國內移栽作業的主力軍,作業時靠人工取喂苗,作業效率低、用工量大,機械化效益不明顯,很難滿足現代農業規模化生產模式的需要[4-6]。自動移栽機的出現很好地解決了上述問題,其取苗裝置能連續、高效地將缽苗從穴盤中有序取出并快速移送到目標位置,真正意義上實現了移栽作業的自動化。
取苗裝置作為自動移栽機的標志性部件[7],已經成為自動移栽領域研究中的熱點[8-12],其對移栽機作業械化水平的提高乃至現代農業的發展都具有重要的意義。為此,對國內外取苗裝置的現狀進行了分析,針對當前取苗裝置存在的問題進行歸納,并對取苗裝置的發展方向進行了預測,以期為缽苗自動移栽機的研究提供參考。
1 國內外取苗裝置的研究現狀
以歐美日為代表的發達國家由于國民生活水平較高,人工成本昂貴,在20世紀80年代就開始了自動取苗技術的研究。近年來,隨著自動控制技術、傳感器技術、驅動技術及機器視覺技術在取苗裝置中的應用,取苗自動化程度也越來越高,目前已有成熟產品應用于實際生產中。
國內對自動取苗技術的研究起步較晚,移栽作業目前以半自動化移栽機為主。近年來,隨著人民經濟收入和生活水平的提高,我國移栽作業機械化水平的提高已成為亟待解決的問題。由于國外移栽裝備不適合我國農業生產的國情,難以在我國推廣,因此國內相關科研院所對自動取苗技術開展了研究,目前多數研究成果處于試驗、試用階段。
根據自動移栽作業時取苗方式的不同,將取苗裝置分為氣力輔助式、頂出式、夾取式、組合式及帶式5種類型。
1.1 氣力輔助式取苗裝置
氣力輔助式取苗裝置作業時利用氣流的作用力使苗缽和穴盤分離,主要由氣力產生裝置和穴盤移位裝置組成。
Frank W. Faulring等[13]設計了氣力輔助式取苗裝置,如圖1所示。
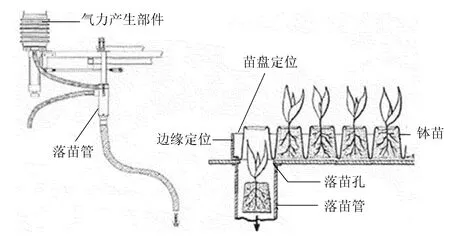
圖1 空氣輔助取苗裝置
取苗時,在穴盤移位裝置控制下,待取缽苗隨盤依次移位至落苗孔正上方,在自重和氣流負壓作用下與穴盤分離,通過落苗孔落入導苗管。
為了降低基質損失率,提高取苗成功率, Lawrance N. Shaw等[14]設計了氣動-頂出式取苗裝置,如圖2(a)所示。在頂桿軸向45°開噴氣孔,借助氣流的作用力使苗缽與穴盤分離,然后頂出,解決了頂出式取苗中頂桿刺入、頂破苗缽導致取苗失敗的問題。
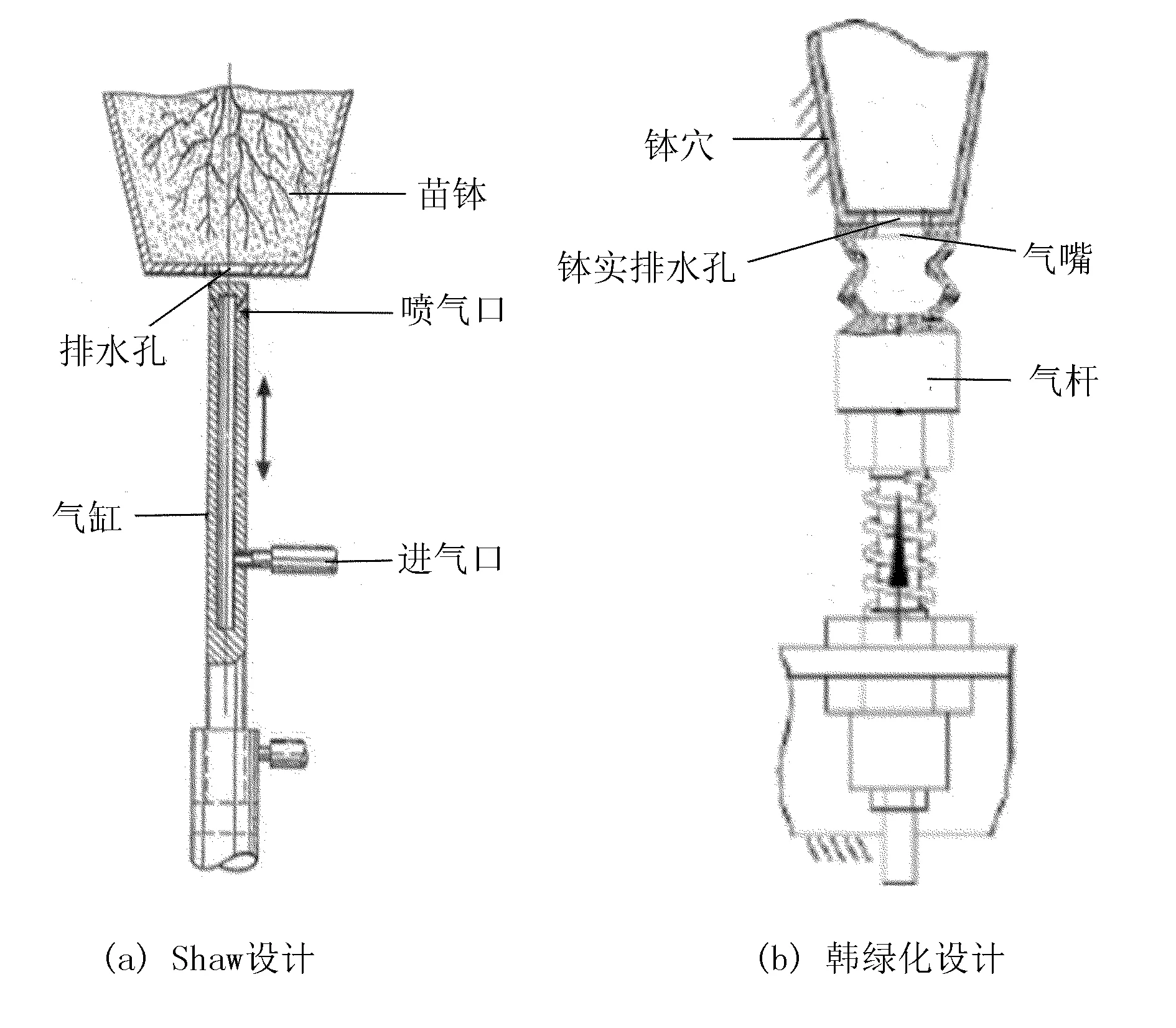
圖2 氣動-頂出式取苗裝置
韓綠化等[15]在Lawrance N. Shaw設計基礎上研制了底部吹氣式缽體與穴盤松脫裝置,如圖2(b)所示。該裝置借助壓縮空氣瞬間釋放的沖擊力沖頂缽苗,實現了缽苗與缽穴壁之間非機械接觸式松脫。
包春江等[16]研制了氣吸式水稻缽苗取苗裝置,孫廷綜等[17-18]研制了真空落苗機構。這兩種取苗裝置都用于水稻缽苗移栽取苗,均采用單片機控制來控制落苗管內部空氣壓力,達到氣力輔助取苗目的。
羅錫文等[19-20]研制了氣力有序拋秧機,采用壓縮氣流從苗盤底部將水稻缽苗吹出秧盤,來實現水稻穴盤苗的取苗。
氣力輔助式取苗在最大程度上減少了苗缽基質損失和幼苗的損傷,不足之處是瞬時氣流強度控制難度較大、下落取苗對育苗穴盤缽穴形狀要求特殊、落苗孔不適用于葉幅寬較大的葉菜類作物等,制約了氣力輔助式取苗裝置的推廣應用。
1.2 頂出式取苗裝置
頂出式取苗裝置由頂苗機構和移位機構組成,作業時移位機構和頂苗機構互相配合,使頂苗桿通過穴盤底部孔把缽苗有序頂出并落入栽植機構,或經輸送帶送至栽植機構。
E.C. Armstrong等[21]設計的頂出式取苗裝置,如圖3所示。取苗時,穴盤在移位機構驅動下在垂直方向逐行喂苗,做往復直線運動的頂桿將缽苗從穴盤中逐行頂出。
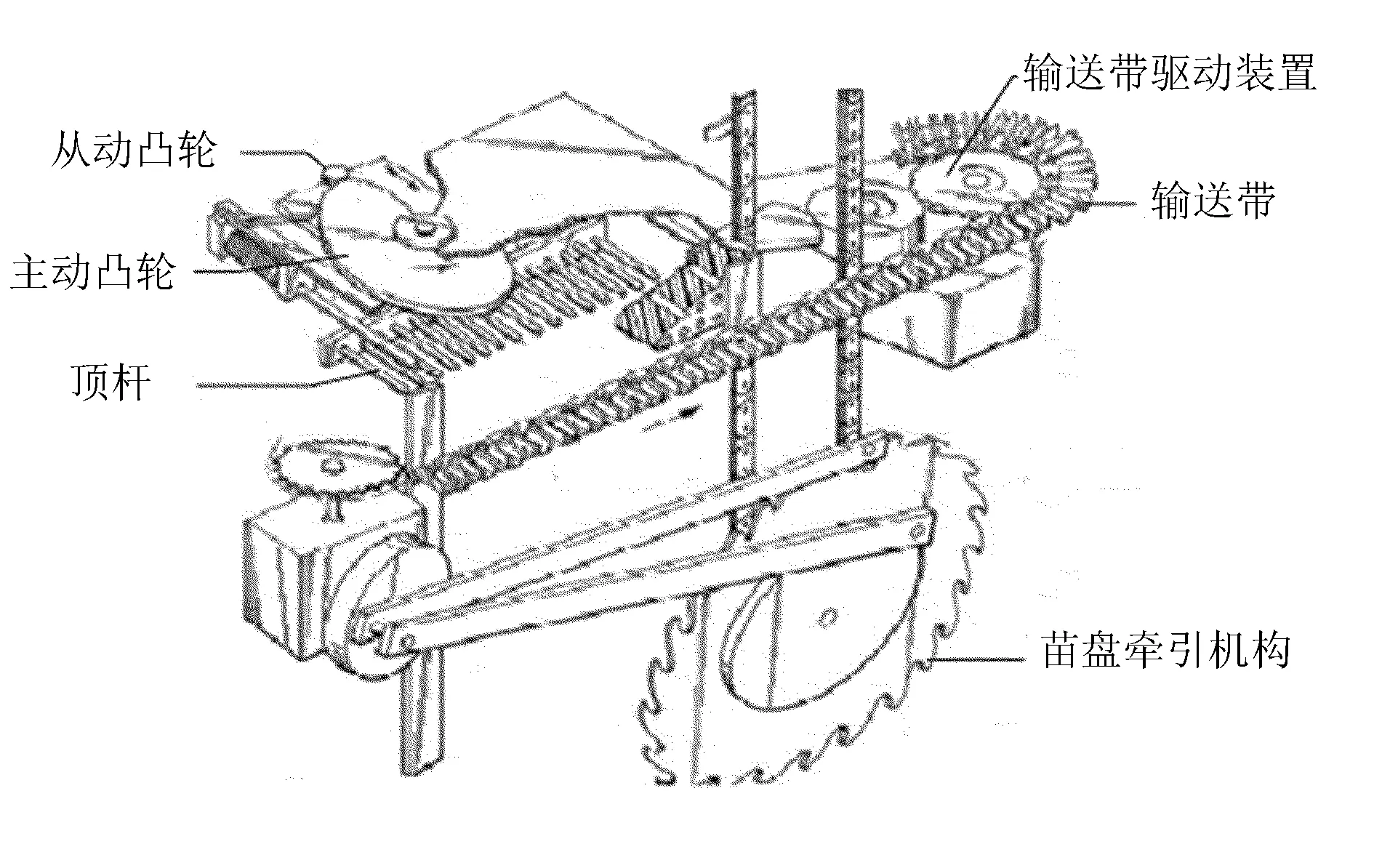
圖3 頂出式取苗裝置
吳崇友等[22]研制了棘爪-棘輪頂出式取苗裝置,如圖4所示。該裝置適用于秧苗移栽機,取苗時頂苗桿將缽苗頂出,然后在撥秧輪的作用下有序落入導苗管。
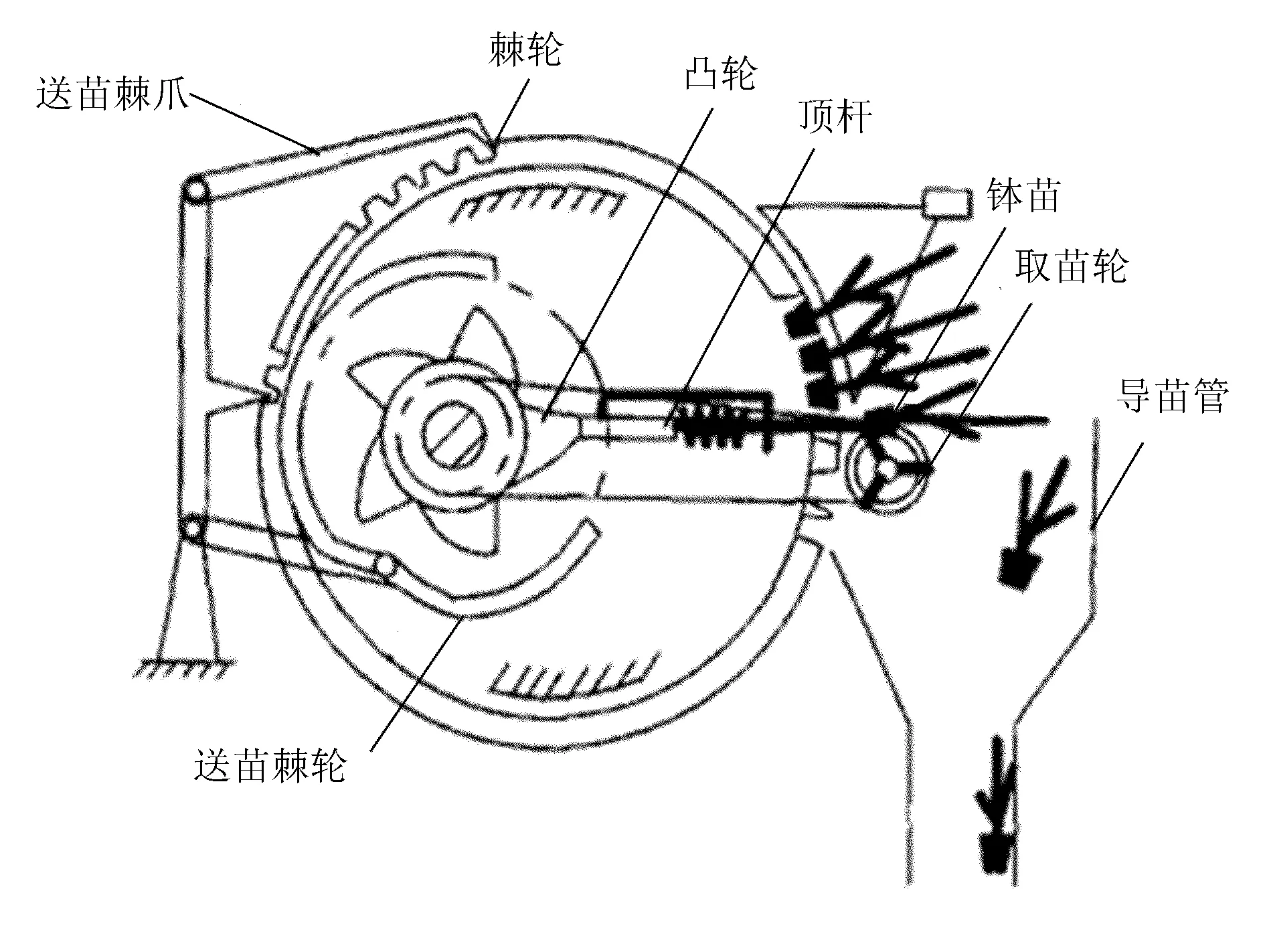
圖4 棘爪-棘輪頂出式取苗裝置
宮成宇等[23]設計了用于玉米缽苗移栽的內槽盤式取苗裝置,實現了整排頂出取苗,大幅提高了取苗作業效率。尹大慶等[24]設計了一種有序頂出式分秧機構,如圖5所示。
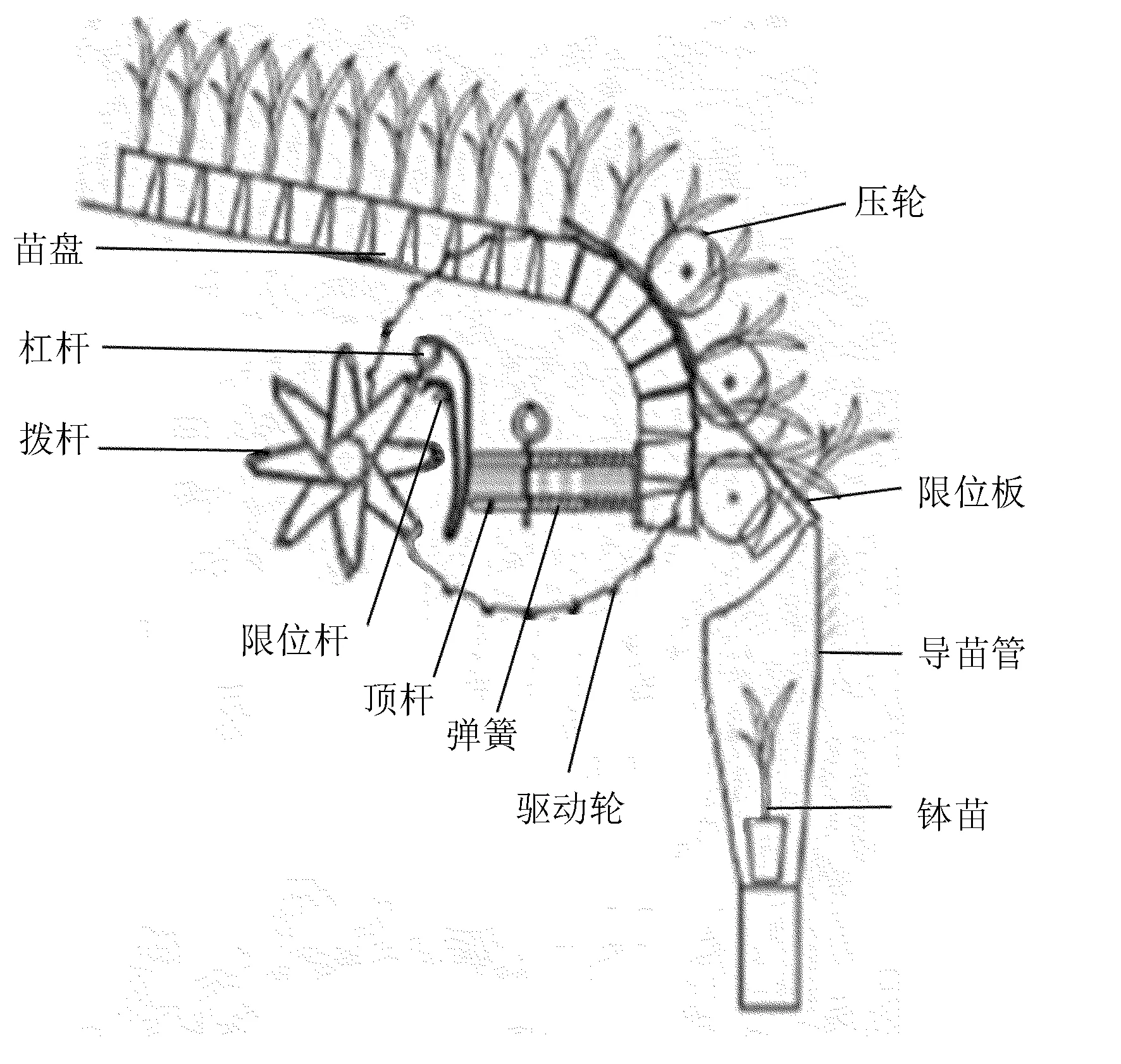
圖5 有序頂出式取苗裝置
該機構作業時秧盤縱向勻速送秧,在勻速旋轉的撥桿作用下,通過對應杠桿推動頂桿將同一排缽苗有序頂出。
徐玉娟等[25]研制了凸輪滾子頂出式取苗裝置,通過提高頂苗凸輪和雙螺旋送苗機構的精度,提高取苗成功率。該裝置完全由機械傳動,成本低,精度高,取苗成功率達到95%以上,如圖6所示。
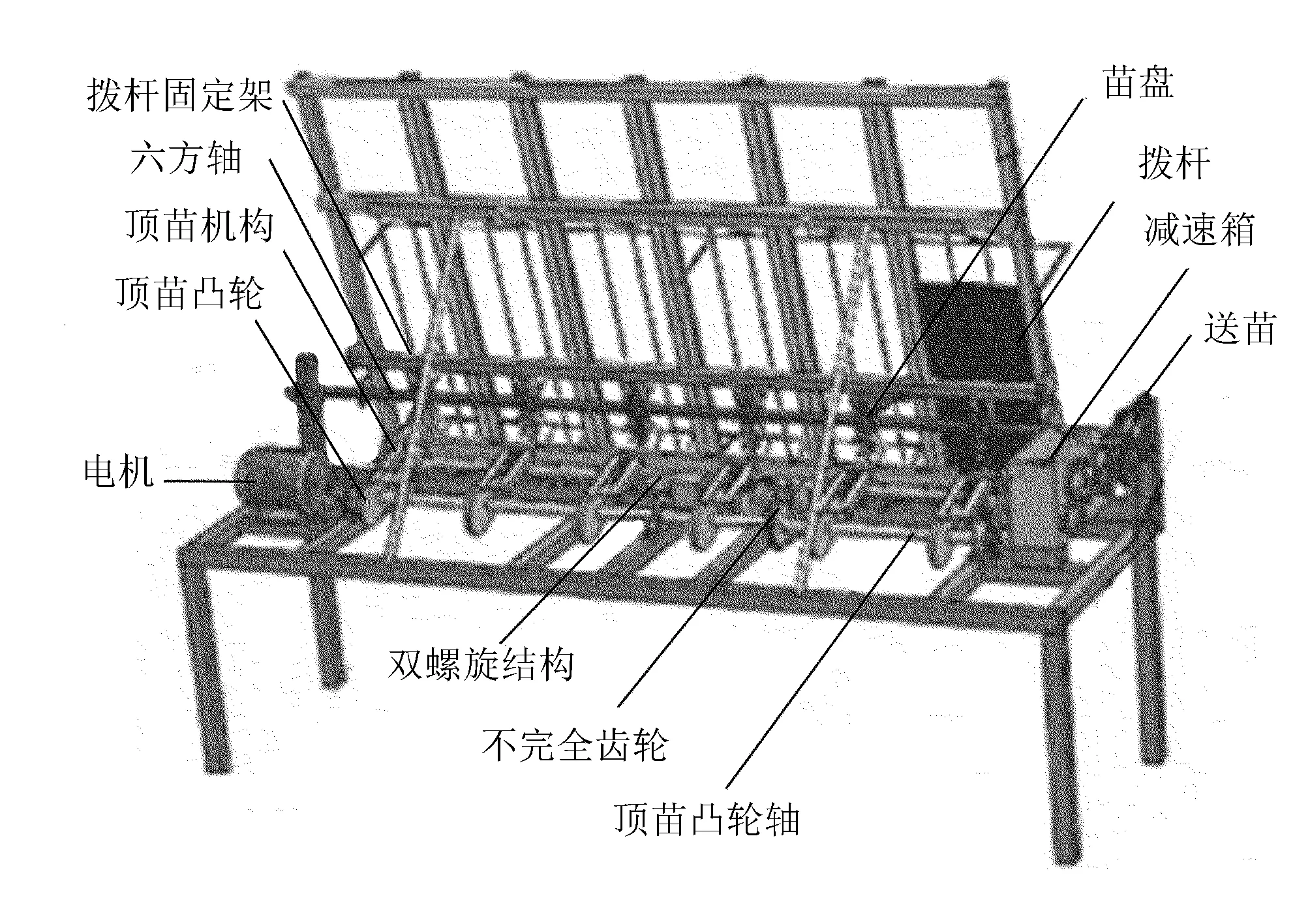
圖6 雙螺旋凸輪頂出式取苗裝置
為提高取苗作業效率和缽苗移栽自動化水平,楊傳華[26]研制了基于PLC控制的頂出式取苗裝置,在PLC控制下步進電機驅動頂桿將苗頂出至輸送帶,然后按序將缽苗輸送到投苗機構,如圖7所示。
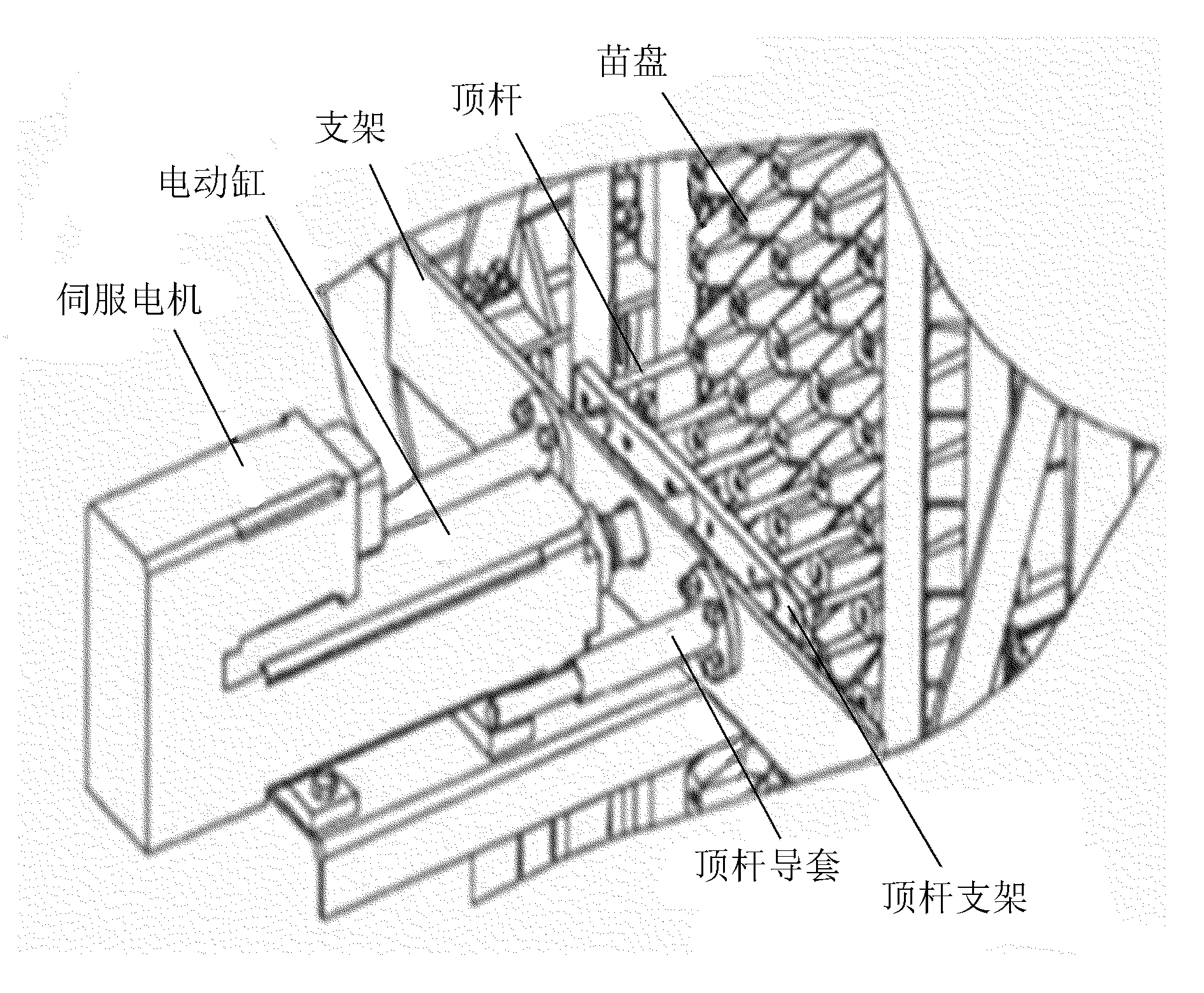
圖7 伺服頂出式取苗裝置
頂出式取苗裝置結構相對簡單,作業效率高,但對穴盤的制造工藝和穴盤的移位機構控制精度要求較高,同時要求待取苗缽有足夠大的內聚力,以免頂桿刺入缽體或頂碎缽體,影響取苗成功率。
1.3 夾取式取苗裝置
夾取式取苗裝置主要由移位機構及取苗手爪組成。作業時,移位機構帶動穴盤移動,將穴盤缽穴有序移送到目標位置,取苗手爪末端執行器采用扎入夾缽或直接夾缽苗莖稈的方式,將苗缽從穴盤取出并移送到投苗位置,如圖8所示。
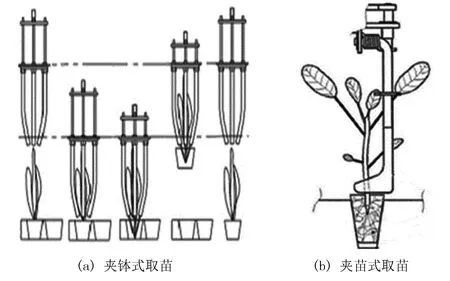
圖8 夾取式取苗裝置示意圖
K.C.Ting和Y.Yang等[27]設計了氣動滑針式取苗裝置,主要由壓縮氣缸、滑針組成,如圖9所示。作業時,以氣缸驅動帶有傳感器的滑針式夾持器垂直接近苗盤缽穴,取苗針下移從幼苗側面傾斜插入土缽,將缽苗取出。取苗過程距離傳感器用來檢測缽苗與滑針的相對位置避免取苗滑針傷害秧苗,力傳感器用來檢測取苗針對苗缽施加的夾持力,以避免取苗針對苗缽夾持力過大而導致苗缽破損影響取苗成功率。

圖9 氣動滑針式取苗器
洋馬公司研發了齒輪-連桿式取苗機構[28],主要由齒輪箱、連桿-滑槽機構和取苗爪構成,如圖10所示。
圖10 齒輪-連桿式取苗裝置
作業時,在齒輪和連桿-滑槽機構作用下取苗爪實現扎入苗缽,然后由盤形凸輪控制取苗爪開合來完成苗缽夾取和投送動作。該機構結構緊湊、體積較小,但取苗效率不高、滑槽易磨損。
荷蘭Visser公司生產的PC-21型取苗裝置如圖11所示。該裝置采用由獨立伺服電機驅動的四針式取苗爪,可適應多種穴盤規格,并通過機器視覺技術識別苗的生長情況判別缺苗缽穴,取苗成功率較高。作業時,取苗爪垂直扎入苗缽,容易傷害幼苗,破壞苗缽完整性。美國RAPID公司研制的RTW型取苗裝置中,取苗器末端采用片狀夾指,結合氣動和電控技術從側面抓取缽苗,有效地降低了取苗器對缽苗的損傷[29]。

圖11 PC-21型取苗裝置
K. H. Ryu 等人[30-31]開發了一種基于機器視覺的取苗裝置,并對取苗末端執行器進行優化處理。取苗時,取苗爪向視覺裝置提供的缽苗坐標位置運行,然后由氣缸分別驅動取苗末端執行器夾指來完成對缽苗的夾取、移動和投放,取苗成功率達98%。
毛罕平團隊對夾持式取苗裝置研究較多,韓綠化等[32-33]設計了兩針鉗夾式取苗末端執行器和兩指四針鉗夾式扎入夾缽取苗器,來提高取苗成功率,如圖12所示。

圖12 鉗夾式取苗器
作業時,當穴盤苗移位到目標位置后,在氣缸驅動下取苗針完成扎入、夾取和釋放缽苗動作。嚴宵月等[34]研發了整排取苗裝置,極大地提高了取苗效率。
俞高紅團隊[35-37]開發了一種基于非圓齒輪行星輪系的回轉式取苗機構,并對其機構進行優化處理,研制出三臂回轉取苗機構,如圖13所示。該取苗機構齒輪箱通過齒輪傳動實現回轉運動,驅動取苗爪按預定取苗軌跡運行,在凸輪頂桿作用下完成扎入、夾取和釋放缽苗動作。該取苗機構效率高,性能穩定,但機構中非圓齒輪加工難度較大。
崔巍等[38]設計出了齒輪-五桿式取苗機構,如圖14所示。該機構同時解決了洋馬齒輪-連桿式取苗機構中滑槽易磨損問題和非圓齒輪行星輪系取苗機構中非圓齒輪加工困難問題。
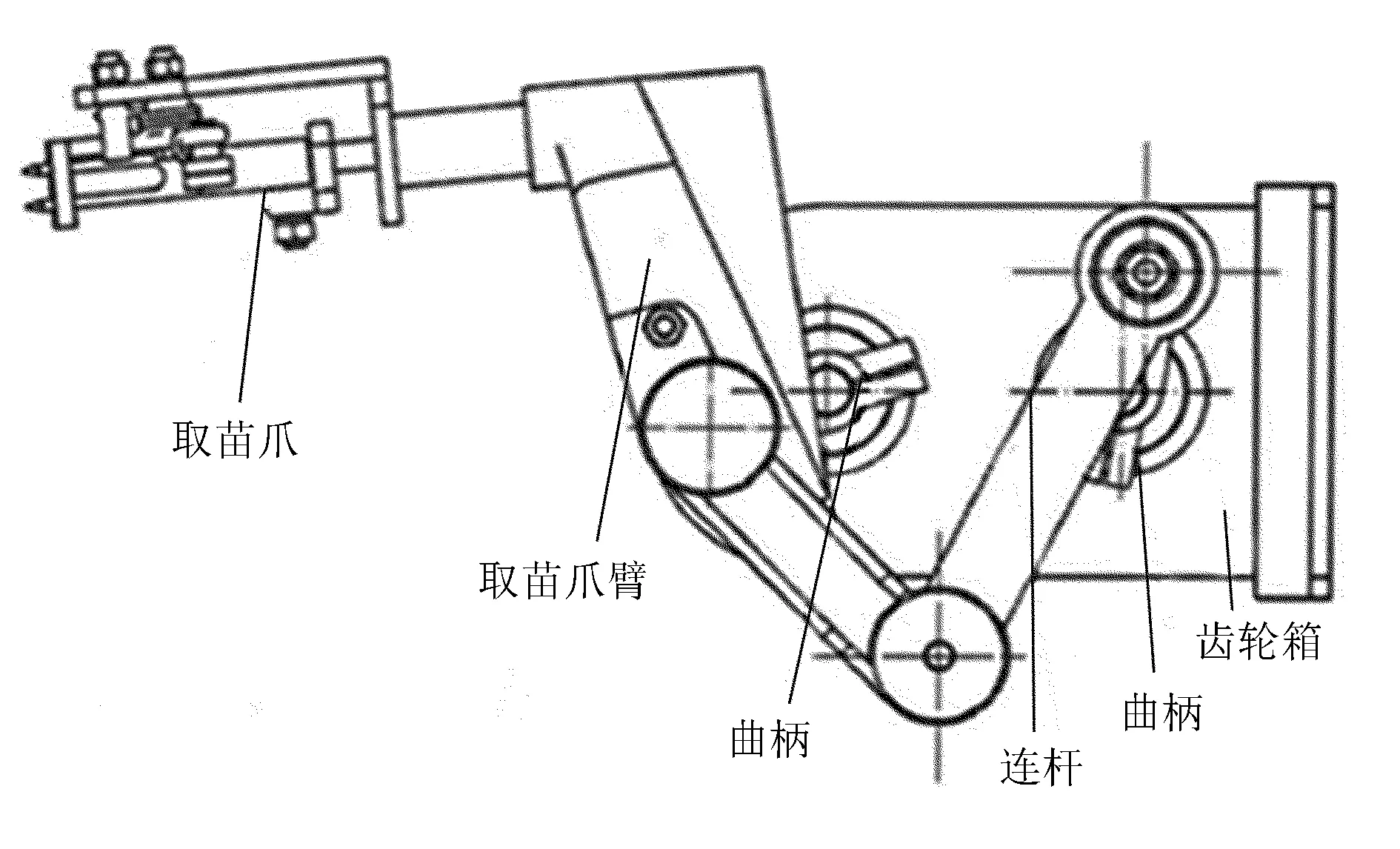
圖14 齒輪-五桿式取苗機構
金鑫等[39]研制了一種五桿-定軸輪系取苗機構,由1對直齒圓柱齒輪機構和平面五桿機構組合而成。胡敏娟等[40]設計了滑針式取苗器,利用滑動取苗針扎入夾取缽苗。韓長杰等[41]設計了多組氣缸驅動的翻轉擺位式取苗機械手,利用氣缸控制取苗爪扎苗、放苗動作。廖慶喜團隊[42]為油菜紙質缽移栽機設計了氣動嵌入式取苗機構,在氣缸驅動下實現取苗針扎入夾取苗缽,取苗成功率達92%。
宋建農等為提高水稻缽苗移栽質量研制出對輥式拔秧機構[43],主要由輸秧輥、壓秧板、上下拔秧輥等部件組成。作業時,上下拔秧輥運行使夾苗板配合來完成夾莖取苗和松開莖稈投苗動作,如圖15所示。
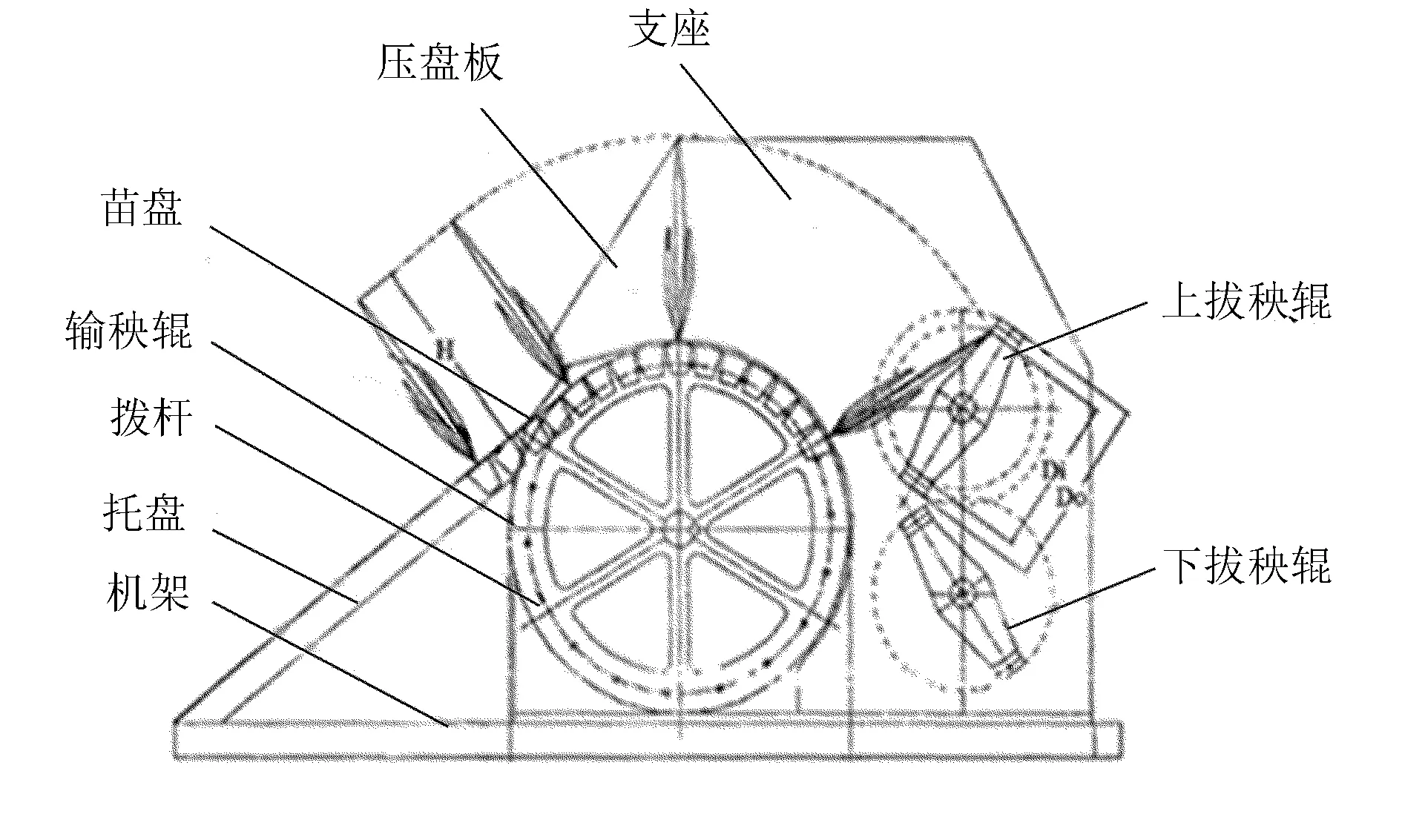
圖15 對輥式拔秧機構
韓長杰等[44]設計了基于平行移動夾片式取苗機械手,主要由擺臂、滑桿、長夾片與短夾片組成。作業時,擺臂控制長、短夾片在滑桿上的移動方向,使相鄰長、短夾片完成夾莖取苗和投苗動作。
趙勻等[45-46]為降低基質損失,研制了反轉式共軛凸輪蔬菜缽苗取苗機構和夾片式夾苗機構,這兩種機構都是利用取苗末端執行器夾取缽苗莖稈進行取苗。作業時,夾秧片從缽苗基質附近的莖稈位置進行夾取,通過控制機構來完成取苗末端執行器夾取和投苗動作。
夾持式取苗裝置對移位機構和取苗末端執行器的運行精準度要求高,受末端執行器尺寸限制,不適用于缽體尺寸較小的缽苗移栽取苗。由于取苗末端執行器從缽苗的上方對對穴盤苗進行夾持作業,容易傷及幼苗的莖葉;末端執行器扎入苗體后對苗缽施以夾持力會破壞缽體的內聚力,在缽體與缽穴內壁間的粘附力和摩擦力作用下很容易發生苗缽破損或散坨現象,導致取苗成功率下降。
1.4 組合式取苗裝置
組合式取苗裝置由移位機構、頂苗機構、取苗末端執行器和控制機構組成,具有頂出式取苗和夾取式取苗的優點,能降低取苗末端執行器對幼苗的傷害和缽體破損。作業時,移位機構將帶苗穴盤移送到目標位置,頂苗桿穿過苗盤底部漏水孔將缽苗頂出,隨后取苗機構末端執行器夾取或扎取苗缽并送到投苗位置。根據缽苗頂出后末端執行器對苗缽的作用方式不同,分為頂夾結合式取苗和頂扎結合式取苗,如圖16所示。

圖16 組合式取苗裝置
Ferrari取苗裝置即為頂夾式取苗[47],取苗爪運動至取苗位置后靜止,由頂桿將缽苗整排頂出并推入取苗爪夾持區;隨后,取苗爪夾持苗缽并將缽苗送至分苗機構。該裝置中苗與穴盤的分離由頂桿完成,取苗爪靜止接收被頂出的秧苗,其動作穩定可靠,傷苗率低,作業效率高。
Isao Mikawa等[48]人設計的取苗裝置如圖17所示。穴盤水平放入苗盤移位機構,逐行向前進給供苗,當傳感器檢測到目標位置有缽苗時,頂苗桿上行將苗缽從穴盤頂出,同時取苗滑針插入苗缽中,然后持苗逆時針旋轉將缽苗送至栽植機構,縮回滑針完成送苗。這種取苗裝置結構簡單,運行可靠,工作效率較高。
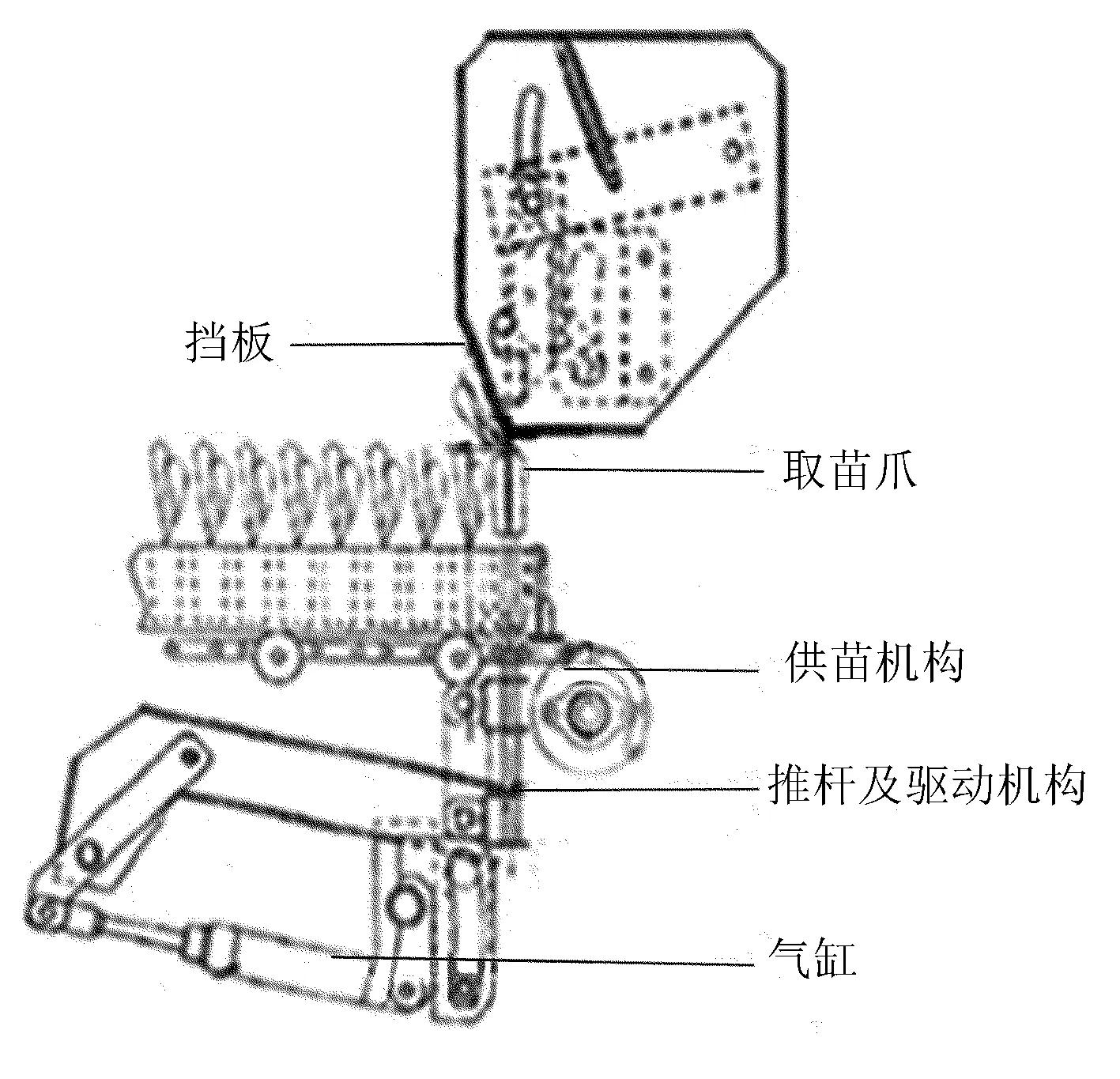
圖17 Mikawa取苗裝置
王蒙蒙等[49]設計了曲柄擺桿式穴盤苗取苗機構,采用擺桿式夾取爪與頂苗機構配合完成取苗,如圖18所示。研究中,通過力學、運動學分析和仿真的方法,來確定和優化取苗機構結構參數和工作參數。該機構結構簡單,性能可靠,取苗成功率為 95.8%。

圖18 曲柄擺桿式取苗機構
為降低取苗裝置的制造成本,金鑫等[50-51]設計了純機械傳動的頂-夾結合式取苗裝置,如圖19所示。其采用圓柱凸輪機構和齒輪-槽輪機構控制苗盤移位,曲柄滑塊機構完成頂苗動作,凸輪和齒輪齒條機構完成夾苗、移苗和投苗任務。同時,結合建模和仿真技術對各機構結構參數進行優化,來降低取苗基質損失率。
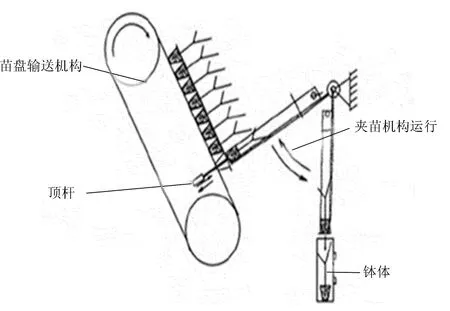
圖19 頂-夾結合式取苗裝置
為了提高取苗裝置的作業效率,倪有亮等[47]設計了一種由 PLC 控制的取送苗裝置。取苗過程中,由PLC控制苗盤移位機構、集排式頂苗機構和取苗爪協同作業完成取苗任務,取苗頻率可以達到7次/min。
為了降低取苗時基質損失率和對幼苗莖葉的傷害,何亞凱[52]設計了頂-扎結合式取苗裝置。取苗時,頂苗桿先將苗缽從盤中頂出;隨后,針狀取苗末端執行器從缽體側面傾斜扎取苗缽,并移送至投苗機構。該裝置取苗時基質損失率低,成功率高,適用于葉幅寬較大、莖稈不明顯作物幼苗。
組合式取苗裝置具有頂出式取苗和夾取式取苗的優勢,能減少取苗設備對苗體和苗缽的傷害。特別是采用PLC控制技術和氣、液驅動技術后,取苗效率和取苗性能穩定性都得到有效提高,解決了葉幅寬較大和無莖稈類作物穴盤苗取苗難的問題。組合式取苗裝置結構相對復雜,受缽苗形態影響取苗末端執行器尺寸較大,制約了作業效率的提高。
1.5 帶式取苗裝置
帶式取苗裝置主要用于鏈式紙缽移栽取苗,由剝紙帶機構和輸送帶組成。圖20為Tetsuo Nanbu等[53]設計的帶式取苗裝置。作業時,用引導盤將兩條紙帶分別引到剝紙帶機構將包裹紙帶剝除,隨后第一傳輸帶夾持缽體有效完成了取苗作業;待缽苗運行到兩組輸送帶重合位置時,第2組輸送帶夾住缽苗莖稈將缽苗送到投苗位置。
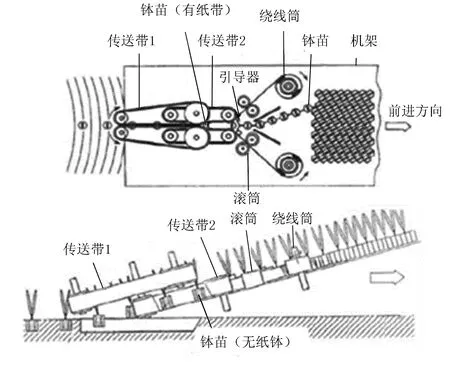
圖20 帶式取苗裝置
陳海濤等[54-55]為解決鏈式紙缽苗取苗問題,設計了鏈式紙質缽苗分離裝置。該分離裝置能有效提高鏈式紙質缽苗的分離速度,降低紙質缽苗的破損率。
這類取苗裝置結構簡單,運行可靠成本低,與專門串聯紙質缽配合時作業效率高,但對幼苗莖葉有一定的傷害。
2 取苗裝置存在的主要問題
2.1 取苗裝置對缽苗損傷率高
根據對國內外取苗裝置現狀分析可知,現階段用于缽苗自動移栽的取苗方式主要有夾取式、頂出式和組合式等。這幾類取苗裝置在作業時末端執行器直接作用于苗缽或幼苗,將缽苗從缽穴中取出。在這個過程中,末端執行器作用于缽苗的力在豎直方向的合力要克服缽苗脫盤時缽體受到的切向粘附力f1、摩擦力f2、法向粘附力f3及苗缽自身的重力,如圖21所示。圖21中,F1為夾取時苗缽受到向上的合力,F2為頂出時缽底受到頂桿作用力,G為苗缽重力,f1為脫盤時苗缽受到切向粘附力,f2為脫盤時苗缽受到摩擦力,f3為苗缽與缽穴底部的粘附力苗缽4個側面受力相同。
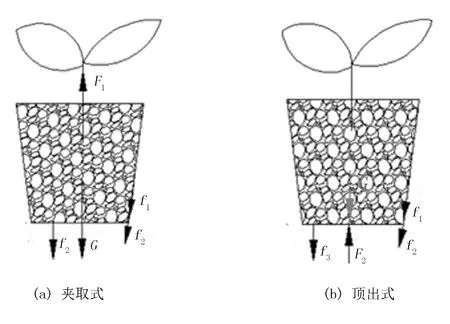
圖21 取苗過程中苗缽受力示意圖
由于苗缽自身物理成分的不均一性,使得苗缽與缽穴壁間粘附力及苗缽內部粘聚力差異較大。因此,當取苗過程中末端執行器對苗缽的作用力大于苗缽內部粘聚力時,會造成缽體變形、破損、散坨等現象。苗缽破損輕者會影響缽苗栽后長勢,苗缽散坨直接導致取苗失敗。另外,缽體損失過大的苗缽在后續投苗過程中,由于質量過小影響缽苗自由下落,導致漏栽率增大。
取苗過程中,由于缽苗的生長受溫、光、水、肥及基質成分等多因素的影響,使缽苗的株形差異較大。同時,受限于缽穴的尺寸、數量及取苗裝置末端執行器的結構形狀,現有的夾取式、頂取式或結合式等取苗方式在取苗時末端執行器都不可避免地與幼苗的莖、葉、根相接觸,使幼苗受到傷害。輕微的幼苗傷害會導致缽苗栽后緩苗期延長;幼苗受損嚴重時會使幼苗致殘,直接影響到幼苗的成活率。
2.2 取苗裝置作業效率低
取苗裝置作業效率取決于末端執行器單位時間內向栽植機構提供缽苗的數量。目前,常用取苗機構每次僅能實現單株取苗或單排取苗,取苗效率相對較低,制約了自動移栽機的作業效率的提高。在自動移栽機技術較成熟的發達國家中,如日本洋馬公司研制的齒輪連桿式取苗裝置采用單株取苗,作業效率僅為60~70株/min,要提高其作業效率必須提高各機構的運行虛度,但受取苗裝置整體各機構力學性能的限制,運行速度提高后取苗裝置取苗成功率則大幅下降[7]。倪有亮等設計的整排式頂-夾組合式取苗機構作業效率也只有91株/min,在進一步研究中發現隨著取苗頻率的升高,取苗成功率迅速降低[47]。目前,移栽技術最為成熟的歐美等國的大型自動移栽機作業效率也不超過150株/行·min[52]。由于取苗裝置的作業效率直接制約著自動移栽機的使用成本,因此其作業效率還有待于進一步提高。
2.3 取苗裝置通用性、自適應性差
目前,取苗裝置的研究雖然取得了較大進展,但其通用性和自適應性不能滿足實際生產需要,導致移栽作業中生產成本升高、取苗質量得不到有效保證。具體體現如下:
由于不同種類之間的作物幼苗在株形、尺寸和種植要求等方面差異較大,因此在育苗時要選用不同規格的穴盤,導致在實際移栽中就必須有相應的取苗裝置來完成取苗作業。為了滿足不同種類作物缽苗移栽作業的要求,科研人員必須設計出不同結構的取苗裝置,無形中增加了農業生產成本。
另外,由于受到溫、光、水、肥等因素的影響,導致同種作物的株形也具有不均一性;同時,育苗穴盤由于受制造工藝、育苗、搬運及重復使用等因素的影響使穴盤發生變形、扭曲、破損等情況,導致穴盤和取苗裝置之間的配合誤差增大,取苗質量下降。
因此,要求缽苗移栽機的取苗裝置具有較好的通用性和自適應功能,針對育苗穴盤尺寸、形狀、完整性的變化進行自動調節,在降低移栽作業成本同時保證取苗裝置的取苗質量。
3 對策與展望
3.1 采用新的設計理念設計取苗裝置
針對常見取苗裝置作業中由于末端執行器直接與缽苗相互作用而對缽苗產生損傷的現象,在分析現有取苗裝置作業過程中缽苗受力的基礎上,總結不同取苗裝置取苗時對缽苗產生損傷的共性,從求新、求異、求變的角度對育苗穴盤及取苗裝置的結構進行創新性設計,而不是僅僅立足現有裝置進行功能彌補性改進。筆者所在團隊開發出缽穴可開式活動苗盤[56],通過降低缽苗與缽穴之間接觸面積及相互作用力來降低苗缽脫盤時的基質損失。同時,在此基礎上設計出托舉式取苗裝置[57],將脫盤后的苗缽從底部托起,避免作業時取苗末端執行器與缽苗之間產生損傷性接觸,以提高取苗質量。
針對現有取苗裝置受自身結構力學的限制不能大幅提高取苗頻率,且采用逐一取苗或逐行取苗的作業方式,導致取苗效率較低的問題,打破傳統認知,采用整盤缽苗一次性取出。筆者所在團隊設計的托舉式取苗機構采用整盤取出式[57],在不提高取苗頻率的前提下大幅提高取苗裝置的作業效率。
3.2 運用智能技術武裝取苗裝置
針對實際生產中取苗裝置通用性、自適應性差的問題,將智能技術應用于取苗裝置的研制中。智能技術具有自動采集信息、傳遞信息、處理信息并根據處理結果發出控制指令的功能。當育苗穴盤規格、缽苗株形發生變化或穴盤因破損、變形導致缽苗移位出現偏差時,取苗裝置控制中心能根據采集到的穴盤和缽苗相關的形狀、位置參數、控制中心存儲的標準參數進行比較,經計算和分析后對取苗裝置執行機構的運行參數進行優化,在保證取苗質量和取苗效率的前提下完成取苗任務。
3. 3 展望
1)自動移栽機取苗裝置對穴盤規格和缽苗整體質量要求較高,在研究取苗裝置和育苗設施的同時育苗農藝也會有較大提高,使農機和農藝能夠真正融為一體。
2)隨著現代農業機械研究的不斷進步,結構簡單、性能可靠、作業效率高且不損傷缽苗的取苗裝置將會應用在缽苗自動化移栽作業中。
3)從現代農業應用需求的角度來看,能識別不同規格的穴盤結構特征及缽苗株形差異,并能根據識別結果進行自適應調節的、高度自動化、甚至智能化的通用型取苗裝置是今后的發展趨勢。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30