地下礦山雙機牽引無人駕駛電機車運輸系統的應用實踐
2020-10-20 02:16:58
礦山機械 2020年10期
銅陵有色金屬集團有限公司冬瓜山銅礦 安徽銅陵 244031
無人視駕頻駛監電控機系車統運為輸輔系助統,是采以用通列信控網技絡術為、平信臺集,閉技術、視頻和圖像處理技術的一項綜合性技術[1]。實現井下電機車的遠程無人駕駛,不僅可以改善工人的勞動環境,減少運輸環節作業人員,提高運輸效率,還可為安全生產提供保障,同時為實現智能化礦山打下良好的基礎。2011 年,銅陵有色冬瓜山銅礦與中國恩菲工程技術有限公司開展了《地下礦無人駕駛電機車運輸》的課題研究工作,進行了井下無人駕駛電機車運輸系統技術試驗、應用和優化,經過多年的研究試驗,形成了前后電機車雙機牽引、前后機車無線通信、裝載站遠程遙控和信集閉機車調度等多功能于一體的雙機牽引無人駕駛電機車運輸系統。
1 雙機牽引無人駕駛電機車運輸系統組成
運輸系統框圖如圖1所示。2019 年 9 月,該雙機牽引無人駕駛電機車運輸控制系統在銅陵有色冬瓜山銅礦 -1 000 m 運輸中段投入生產試運行,達到設計運輸能力。運輸牽引設備為變頻電機車,前后雙機牽引,每列編組由 12 輛 10 m3底側卸式礦車組成,編組總長 80 m,溜井下設置XZG3000*1800 型懸吊式振動給礦機。該系統由無人駕駛電機車及控制系統、巷道有線和無線通信系統、裝載站控制系統、轉轍機控制系統、視頻監控系統、牽引變電所和滑觸線供電監控設備等組成,同時兼顧今后智能化礦山建設需求,為地下無人駕駛電機車運輸系統關鍵技術的研究應用積累了一些經驗和思考。
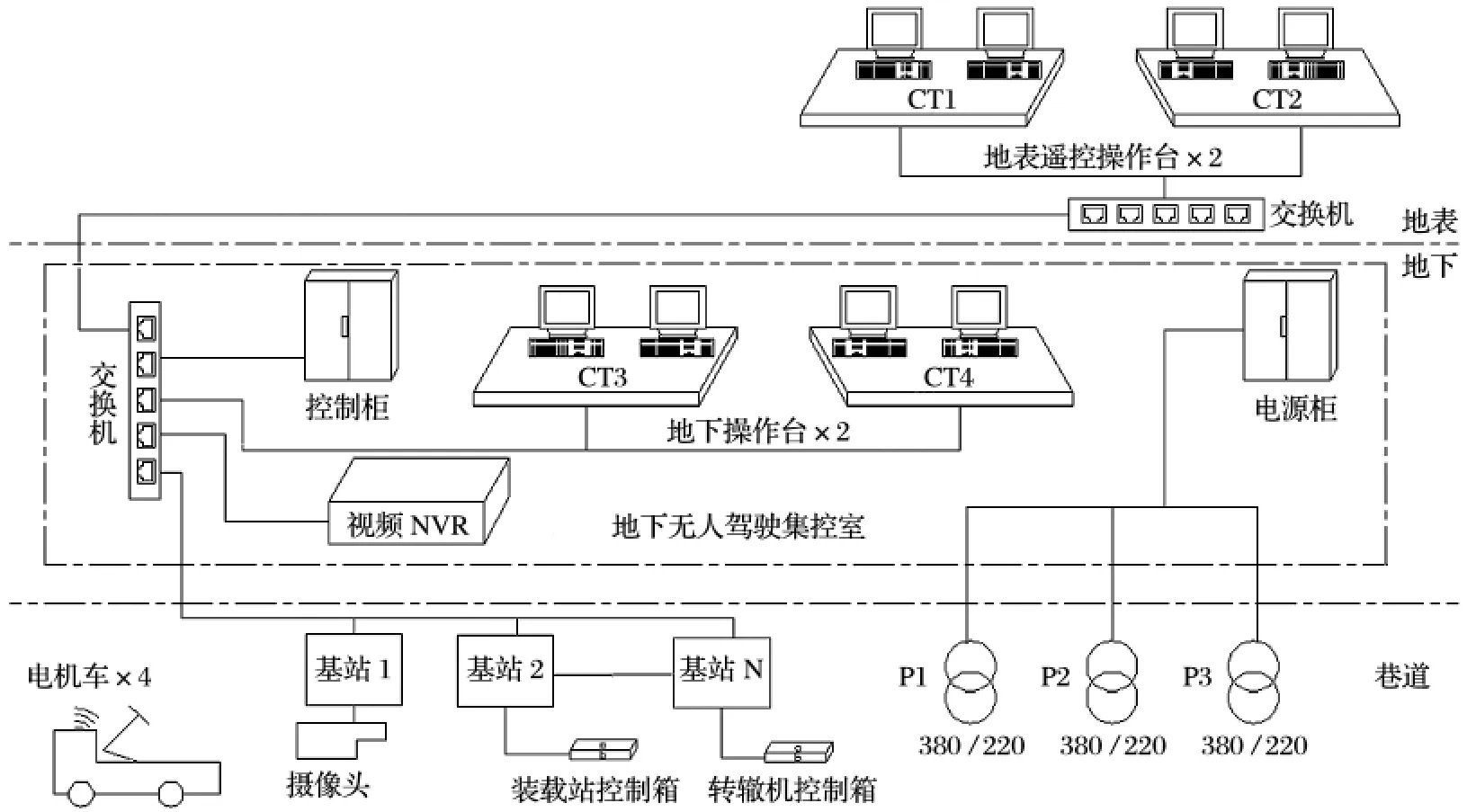
圖1 無人駕駛電機車運輸系統框圖Fig.1 Block diagram of driverless electric locomotive transportation system
2 無人駕駛的運行條件
(1) 礦山放礦溜井不能含有較多的水、泥礦和大粒度礦塊,因為這些可能造成放礦時礦石流量難以控制,而發生跑礦和漏井卡塞現象。
(2) 無人運輸作業區域應相對封閉,便于管理,避免無關車輛和人員隨意進入作業區域。
(3) 運輸軌道和滑觸線敷設需規范,列車運行需平穩。
3 電機車牽引方式的選擇
目前國內外無人駕駛電機車牽引方式有單機車牽引方式和雙機車牽引 2 種。單機車牽引裝卸載方式又包括有動力源卸載站和無動力源卸載站。單機牽引因在裝載和卸載時無動力源只能依靠機車本身慣性運行,此時電機車為失控狀態;而有些礦山采用有動力源卸載站或在裝卸載時采用機車側向位受電等方式,但其投資較大,維護困難,安全管理難度大。因此,冬瓜山銅礦摒棄單機牽引方式,采用前后雙機牽引方式。
4 電機車調速形式選擇
地下軌道運輸以電機車作為牽引設備,調速形式包括電阻調速、斬波調速和變頻調速。變頻調速是一項成熟技術,已經在工業生產各個領域得到廣泛應用。而無人駕駛電機車因沒有司機隨車操作,不能根據實際生產和環境條件的變化實時調整電機車的運行狀態,特別是在電機車減速和停車階段,因此精確可靠的控制是保證電機車運行安全的前提。在目前電機車驅動方式中,變頻調速啟動性能好、調速穩定、制動安全可靠,相對更能滿足此要求[2],故選擇變頻驅動方案用于無人駕駛系統較為合適。
5 無人駕駛運輸系統關鍵技術
無人駕駛運輸系統主要包括電機車控制系統、通信系統、裝載站控制系統、視頻監控系統以及轉轍機、門禁等輔助控制系統。
5.1 電機車控制系統
無人駕駛電機車控制系統是無人運輸系統的“大腦”,保證指令的及時傳遞和準確執行,其直接影響列車的運行和安全。無人駕駛電機車控制應具備 3 種控制方式[1]:
(1) 遠程遙控方式 電機車按指令自動運行或操作員在集控室對編組進行遠程實時控制。
(2) 人工控制方式 由電機車司機隨車操作發出控制指令,控制整列編組。前、后車通過無線通信實現同步運行,用于生產前檢查運輸線路、生產區域狀況和設備運行狀態。
(3) 檢修控制方式 2 臺機車可獨立運行,前后電機車無相互控制關系,用于設備檢修、故障車輛入庫和編組的調配。
5.1.1 電機車須具備的主要控制功能
無人駕駛運輸因無人隨車操控,操作人員在地表或井口集控室遠程遙控完成礦石運輸作業。如果電機車運行完全依靠人工遠程遙控,不僅增加了操作人員的勞動強度,降低了作業效率,更無法確保電機車運輸作業過程的安全性。因此電機車必須具備智能控制系統并按指令要求自動運行,這樣不僅可以減輕操作人員的勞動強度,更使得無人運輸電機車更加安全、高效[1]。電機車控制必須具備以下主要功能。
美日藥物臨床試驗中重大利益沖突的界定和管理探討及對我國的啟示 …………………………………… 蘇 嫻等(17):2333
(1) 自動運行 電機車接收到集控室指令后,按照設定的程序自動運行,在直道、彎道、道岔和裝卸載時自動調整到合理的行駛速度。采用新研發的抗振、防潮的高精度位移傳感器,精確測量電機車的行駛距離和實時速度。通過對電機車位移的精確測量,并配合設定的定點位置檢測裝置實現對電機車定點和區段的速度、加速、減速、集電弓升降、鳴笛的可靠控制。井下多編組運行時,電機車可根據整體運輸線路情況自動調整運行參數,避免與前方機車碰撞,同時自動選擇安全進出穿脈的時機,提高運輸能力。
(2) 電機車同步控制 一列編組通過在前后 2臺電機車的無線通信設備實現雙機聯動,替代傳統的同軸電纜。電機車控制系統以前車為控制中心,對整個編組發出控制指令,實現前后電機車同步前進、后退、調速、制動及駐車等功能。電機車運行時,通過優化軟件實現前車和后車輸出功率自動調整,使前后電機車輸出功率基本相同[1],加大了編組的整體牽引力,提高了編組的安全性能和運輸能力。
(3) 電機車與集控室通信功能 電機車控制系統設有 2 條冗余配置的無線通信系統,確保電機車、巷道和集控室間的無線通信。通過 2 套通信系統自動無縫切換,實現集控室對電機車和相關設備運行的監控,實時將電機車和各設備狀態發送到集控室。同時電機車上安裝攝像機,實時監控電機車運行狀態和運輸線路狀況,實現運輸作業全過程監控,確保安全運行。
(4) 電機車事故處理 電機車出現故障時,及時向集控室報警并自動減速停車,集控室人員遙控編組退出運輸線路,避免占道影響生產[1],保證運輸系統的安全性和生產的連續性。
5.1.2 電機車須具備的主要保護功能
井下實際作業環境的高振動、高溫、高濕及高粉塵等因素對電機車運輸系統的安全可靠運行影響較大。無人駕駛電機車運輸系統因無人隨車操控,操作人員在地表或井口集控室遠程遙控,一旦發生電機車失控或設備故障,對安全生產可能造成極大的影響,因此對無人駕駛電機車運輸系統的自我診斷、故障反饋和安全保護尤為重要。電機車控制系統必須具備以下主要保護功能。
(1) 電機車通信失聯保護 當編組失聯超過 3 s,電機車應自動停止運行并采取停車措施,同時電機車控制系統中具備運行記憶功能,編組運行時又有一定的安全間距,避免了編組間發生碰撞事故。
(2) 電機車位置保護功能 為保證無人駕駛電機車安全可靠地運行,運輸線路的道岔、裝礦點、卸礦站等處配置定點位置檢測裝置。電機車每次運行都應與指定的定點位置進行同步,以消除電機車運行中的累積誤差,保證編組位置的準確性,確保電機車與位置有關的控制功能的可靠執行。特別是當電機車接近特定位置時 (如主、副井口),通過定點位置檢測裝置發出接近位置極限信號,電機車立即實施制動,避免機車墜井事故的發生。
(3) 防碰撞保護 對于同一線路多編組運行電機車,通過信集閉預占道和電機車定位功能實時反饋,結合各編組運行速度、運行方向,列控系統可發出加減速或停車指令,防止發生追尾和碰撞事故。
(4) 電機車減速、制動、制動失效保護 檢測電機車在減速、制動、停車狀態下的速度和減速度,及時發現調速、制動失效,并采取緊急停車措施,確保機車的安全。特別是對于電機車駐車時出現的溜車情況,控制單元迅速診斷電機車移動狀態,并實施緊急停車。
(5) 電機車脫軌保護功能 電機車脫軌是無人駕駛電機車運行中的嚴重事故,如果不能發現或者發現不及時,可能造成整個運輸中段的生產停頓。通過檢測電機車運行狀態,控制系統對位置、速度等參數的分析,以及視頻監控系統的監控,及時發現電機車脫軌,防止事故的擴大。
5.2 網絡通信系統
網絡通信系統是無人駕駛的“中樞神經”,需及時、有效、可靠地傳遞指令。其同樣直接影響列車的運行和安全。
無人駕駛電機車運輸系統有兩路無線通信[1]。一路是前、后電機車通信,實現 2 臺電機車的同步控制。采用 2 套互為冗余的無線通信系統,確保 2 臺電機車控制數據傳輸可靠。另一路是巷道通信,巷道沿途布置通信網絡基站,以通信基站為節點,通過有線或無線的形式將電機車、裝載站、轉轍機、分段開關等控制系統關聯,實現數據采集和傳輸的閉環控制。為確保電機車、裝載站、轉轍機等與集控室之間的網絡通信可靠,各子系統通過各子系統無線發射接收裝置將運行數據實時傳送到集控室[3],同時把集控室的指令發送給各設備。各設備與巷道干線通信網絡配置兩套互為冗余的通信系統,同時整個運輸區域內實現無線通信信號全覆蓋,避免出現通信死角[4]。冬瓜山銅礦采用無線工業以太網和總線通信互為冗余的通信形式。
對冬瓜山銅礦 -1 000 m 中段無線通信的實地測試表明,井下運礦編組的運行對無線通信影響非常明顯。在機車運行的巷道,無線通信有效截面相比空巷道減小近以上,通信距離縮短為空巷道的巷道斷面對通信距離影響也非常大。經實地測定 12 m2巷道斷面,直線空巷道通信距離約為 150 m,彎道通信距離則更短。冬瓜山銅礦 -1 000 m 主運輸巷道通信系統沿途直線巷道按間距 50 m 布置通信網絡基站,彎道按間距 25 m 布置基站,每個基站采用獨立隔離電源供電模式并配置 UPS 電源,減少斷電事故。
5.3 視頻監控系統
根據遠程遙控裝礦和電機車運行的安全、可靠、可視化、實時性的要求,采用高清數字攝像機采集圖像,通過光端機和光纜實現圖像信號的傳輸。攝像機布置在電機車前后端、裝載站、卸載站、轉轍機、牽引變電所及門禁處。考慮到生產的需要,對畫面實時性要求較高,采用 1080P 網絡高清攝像機,以滿足現場對實時性和畫質的要求。為保證數據傳輸的穩定性,采用光纖傳輸,配合網絡高清光端機進行視頻數據傳輸。視頻監控系統應具備一段時間的錄像回放功能。在集控室布置電視墻,用于實時顯示電機車運行狀態,裝載站、卸載站和卸載坑料位,電機車位置、占用區段以及巷道模擬,并根據需求通過網絡將信號傳輸到地表。
5.4 裝載站控制系統
在無人駕駛運輸環節中,影響裝載站自動裝礦的因素較多,如礦石塊度、料位高度、溜井含水量以及含泥量等。礦石流量、放礦速度難以均衡穩定,要實現自動裝礦,難度和投入成本較大。因此,冬瓜山銅礦采用集控室遙控電機車編組運行至合適的裝礦位置,并利用視頻監控系統人工遠程遙控裝礦。裝礦站需具備以下 3 種控制方式。
(1) 遠程遙控方式 用于設備正常運行,接受集控室遠程遙控。
(2) 就地控制方式 用于設備就地操作,不接受遠程控制。
(3) 檢修控制方式 用于機械和電氣設備檢修。
這 3 種控制方式的優先權為:檢修控制方式 > 就地控制方式 > 遠程遙控方式。
集控室通過網絡通信系統與各裝載站的遠程子站實現通信。操作人員通過各裝載站的遠程子站在集控室對裝載站進行控制。
5.5 轉轍機、門禁等輔助控制系統
(1) 轉轍機控制系統 轉轍機采用就地和遠程兩種控制方式。集控室發出指令,實現轉轍機遠程控制,完成運輸線路的調度和各個編組運行線路的控制。轉轍機采用分布式控制結構,在地下總線網絡上掛接遠程子站,完成對各個轉轍機的控制和信號采集工作。轉轍機采用電動驅動方式,通過動作節點反饋信號,提供給集控室控制系統。考慮到電機車的安全,當轉轍機發生故障或反饋信號不準確而造成列車編組運行線路錯誤時,電機車自動診斷出運行線路錯誤,自動停止運行并發出報警。考慮到在發生設備故障和設備檢修時,控制系統設有就地人工控制方式。
(2) 門禁系統 《金屬非金屬礦山安全規程》規定:14 t 以上大型電機車 (或雙機) 牽引運輸,列車制動距離不超過 80 m。因井下巷道實際環境所限,無關人員和車輛在 80 m 外難以被電機車上的攝像機及時發現。另人員走動沒有規律,加上巷道狹窄,使得防撞人判斷困難。同時電機車本身十分緊湊,加裝防撞檢測設備的位置也存在較大困難。因此設置安全門并結合視頻監控構建門禁系統,禁止無關車輛和人員進入運輸區域更為切合實際。同時也可結合“礦山六大系統”中的人員定位系統,以確保無人運輸作業區域內沒有無關人員進入。
6 現場應用
自 2019 年 9 月冬瓜山銅礦 -1 000 m 中段有軌運輸無人駕駛系統投入生產以來,該系統能夠適應現場高溫、高濕、高粉塵、頻繁振動的惡劣環境,各項運行指標均達到要求,最高運輸能力達 1 萬勞動定員減少 54.5%,有效運行時間和生產能力提升 20%以上,節能 10.5%,超過預期目標,極大提升了生產效率,減少了勞動定員和勞動強度。
7 結語
隨著我國金屬礦山從淺部開采逐步走向了深井開采,帶來開采成本和安全風險的增加,工作環境的惡劣,在新的開采條件下,傳統的設備和安全管理理念已不能適應當前安全生產需要,無人駕駛電機車運輸遂成為新時代下機械化、自動化、智能化地下礦山發展的必然趨勢。冬瓜山銅礦經過長期實踐,總結出了無人駕駛電機車運輸系統應具備的條件和注意事項,探究無人駕駛電機車運輸系統在地下礦運輸中的具體應用,為其他地下礦山采用無人駕駛電機車運輸提供了參考。
